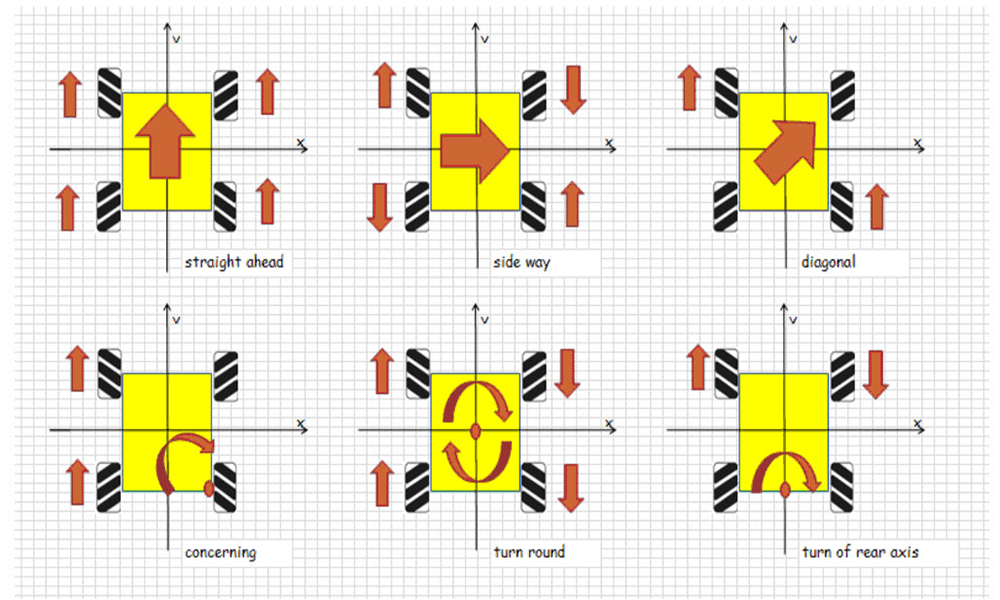
Le ruote omni-direzionali Mecanum sono una tecnologia potente che consente a un’auto robotica di muoversi in qualsiasi direzione, compreso il movimento laterale a sinistra e a destra.
In questo progetto, dimostreremo come utilizzare Arduino per controllare un’auto robotica di marca Osoyoo dotata di ruote omni-direzionali Mecanum.
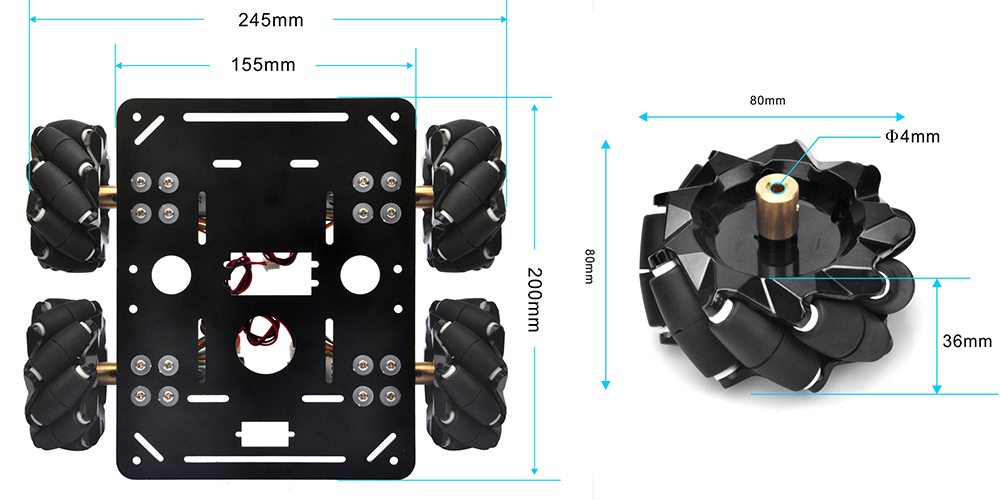
OSOYOO Mecanum Wheels Robotic Car Chassis x 1 (2x ruote sinistre / 2x ruote destre e motore x 4)
Scheda OSOYOO Mega2560 completamente compatibile con Arduino
Scudo WIFI OSOYOO V1.3 x 1
Driver del motore OSOYOO modello Y x 1
OSOYOO Misuratore di tensione x1
Scatola batteria OSOYOO x 1
OSOYOO ponticello da 3 pin femmina a femmina x1
OSOYOO 6 pin maschio a ponticello femmina x2
OSOYOO 2 pin XH.25 da femmina a femmina x1
18650 batterie (3,7 V) x 2
Specifiche:
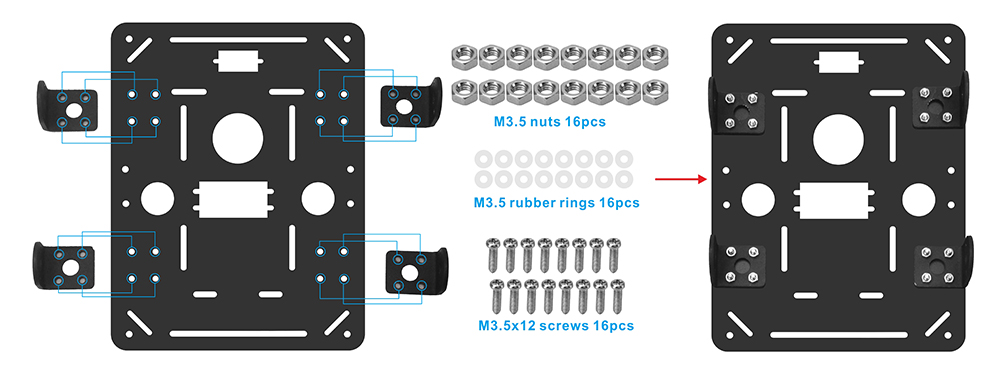
Passo 1. Installare il supporto metallico sul telaio in metallo con 16 viti M3,5*12, anelli di gomma M3,5 e dadi M3,5 come nelle immagini seguenti..
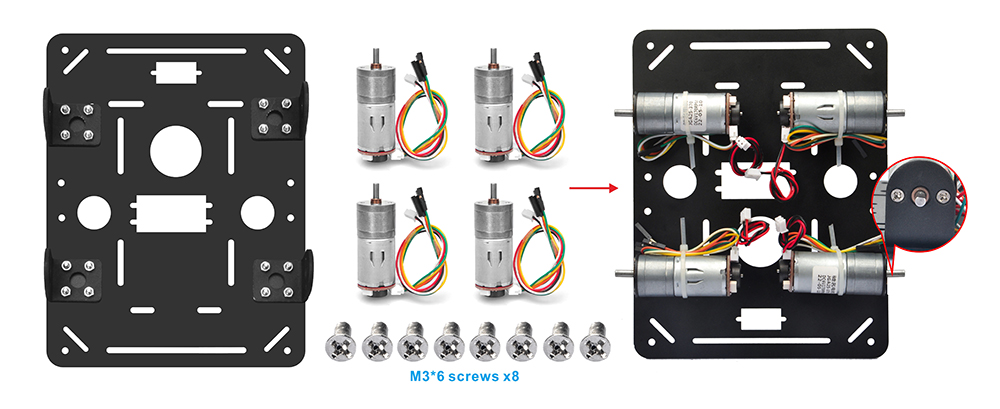
Passo 2. Installare 8 viti M3*6 come indicato nella casella rossa seguente.
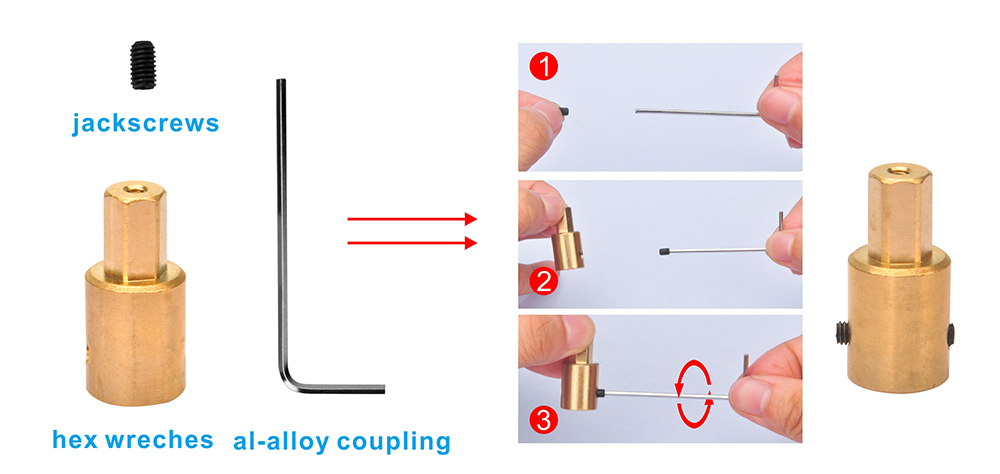
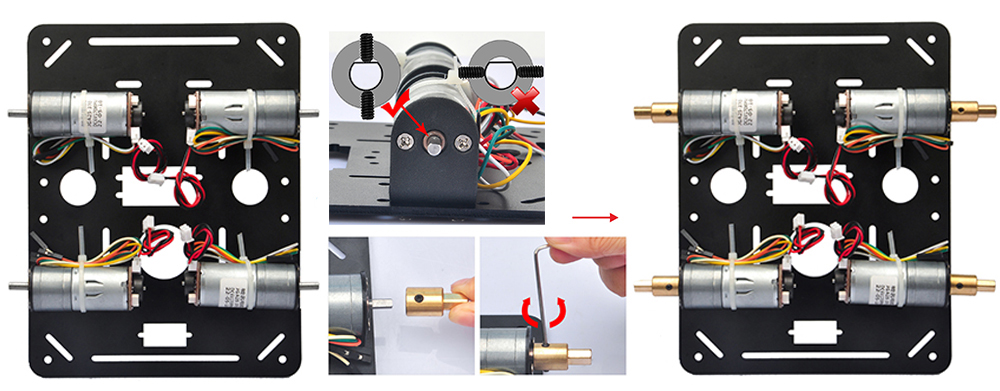
Passo 3. Installare le viti di sollevamento sull’accoppiamento in lega di alluminio, assicurarsi di stringere le viti di sollevamento per fissare l’accoppiamento in lega di alluminio sul motore come mostrato nelle immagini seguenti..
L’albero del motore ha una zona piatta. Assicurarsi che la vite di sollevamento sia posizionata su questa zona piatta e stringere entrambe le viti sull’albero come mostrato nelle immagini seguenti.
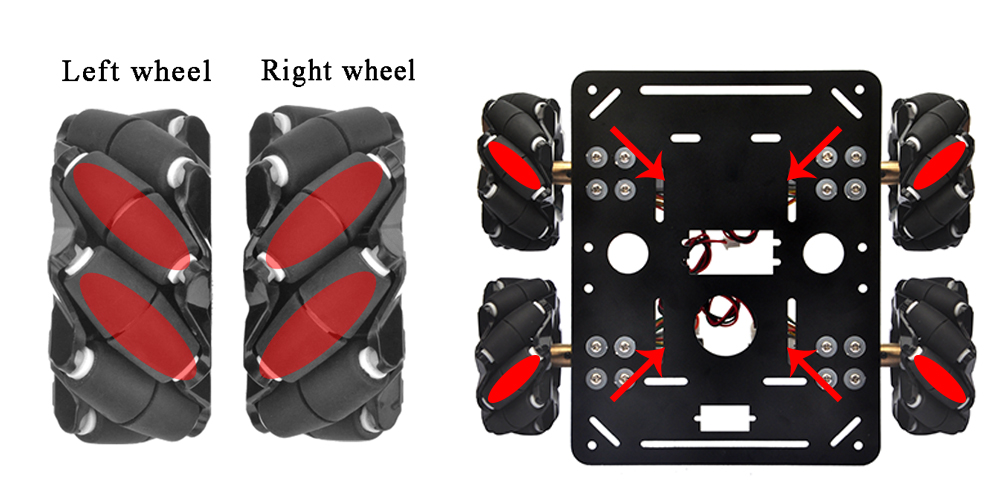
Passo 4. Installare le 4 ruote omni-direzionali Mecanum sull’accoppiamento in lega di alluminio con 4 viti M2,5*10 come nelle immagini seguenti.
Ci sono due tipi di ruote Mecanum, la ruota Mecanum sinistra e quella destra; la differenza tra di esse è l’orientamento dei rulli. Per una ruota Mecanum A, come mostrato di seguito, i rulli sono orientati dal basso a destra verso l’alto a sinistra. I rulli delle ruote B sono installati in modo opposto.
Una configurazione corretta richiede che ciascuna delle quattro ruote sia impostata come mostrato di seguito, dove l’asse di rotazione del rullo superiore di ciascuna ruota punta al centro della piattaforma. Si prega di notare che tutta l’analisi dinamica e i codici pre-scritti si basano su questa configurazione.
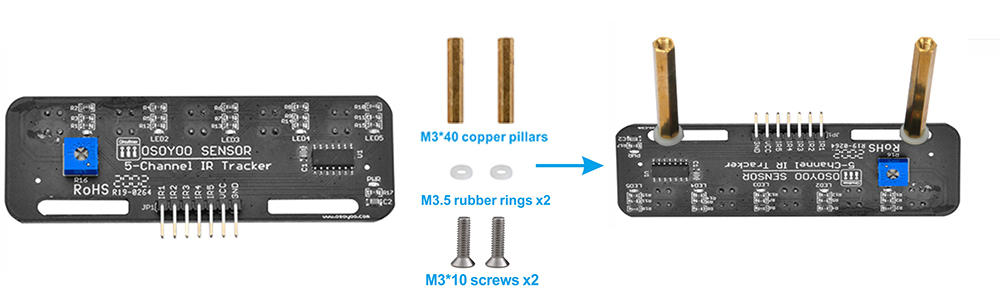
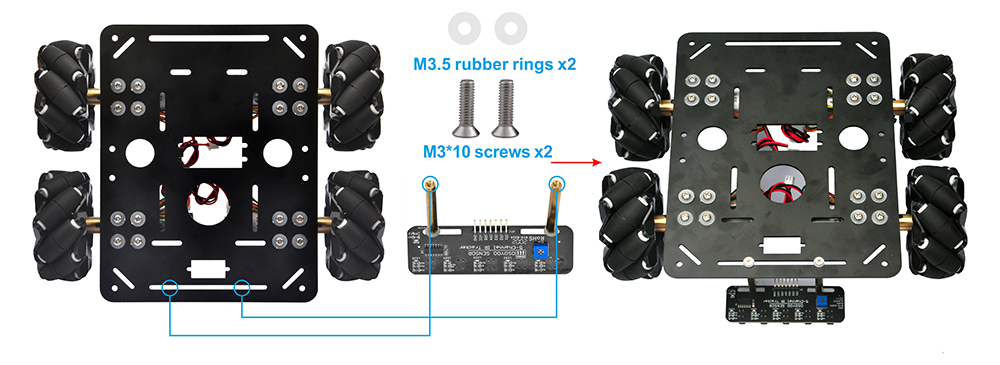
Passo 5. Installare 2 colonne in rame M3x40 con 2 viti M3 e 2 anelli di gomma M3,5 sul sensore di tracciamento come mostrato nelle immagini seguenti.
Passo 6. Aggiungeremo un modulo di tracciamento a 5 punti al telaio dell’auto con dadi M3 come mostrato nelle immagini seguent.
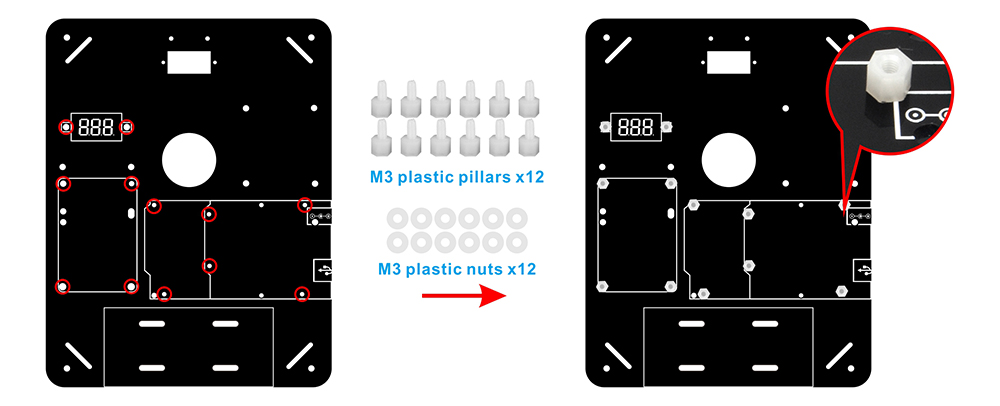
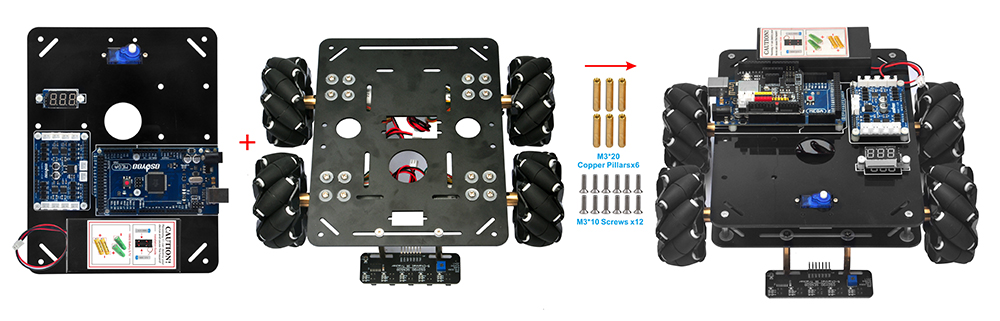
Passo 7. Installare 12 colonne e dadi in plastica M3 sulla scheda acrilica come nelle immagini seguenti.
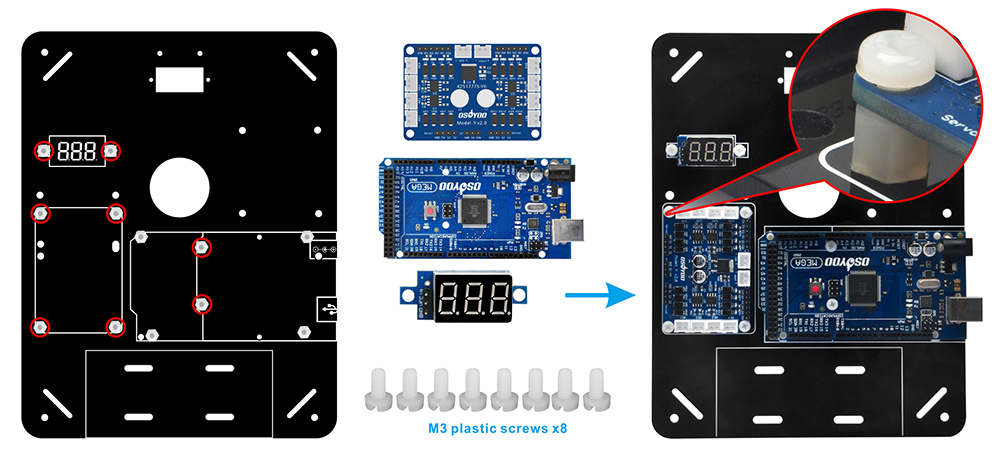
Passo 8. Installare 1 scheda Osoyoo Mega2560, 1 scheda driver motore modello Y e 1 voltmetro sul telaio acrilico con le 8 viti in plastica M3 come nelle immagini seguenti.
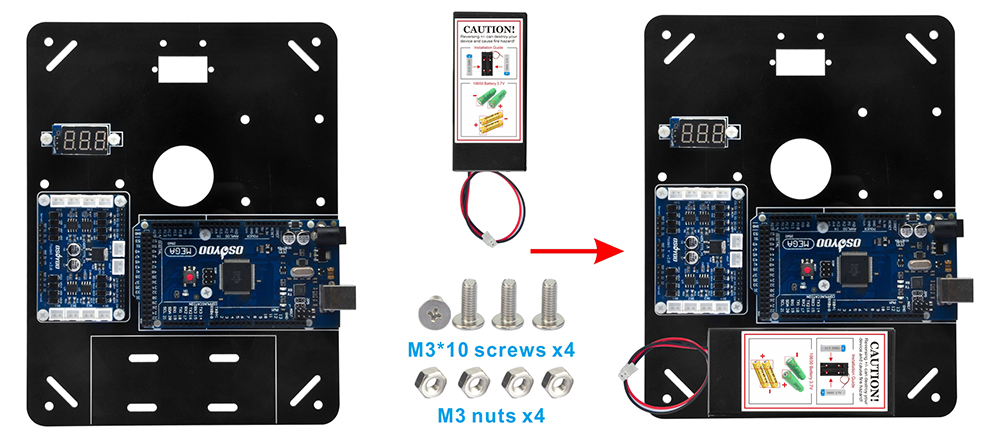
Passo 9. Installare la scatola della batteria con 4 viti M3x10 e dadi come nelle immagini seguenti.
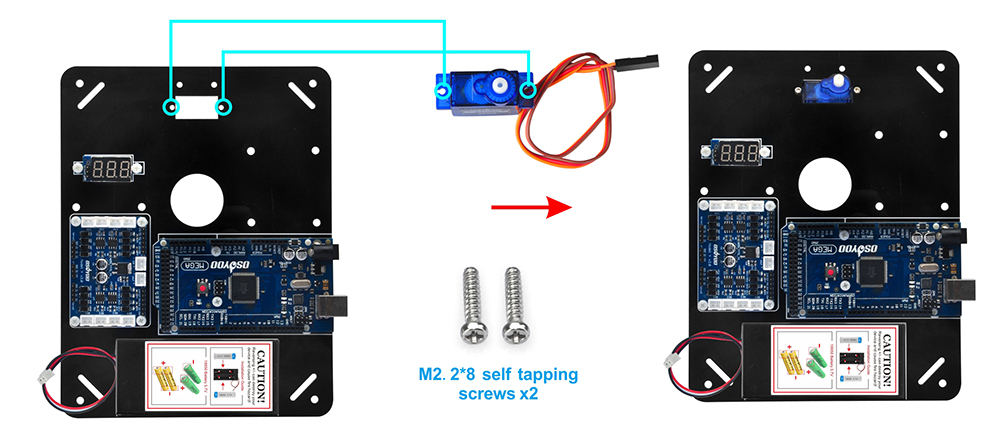
Passo 10. Installare il servo SG90 sul telaio acrilico con 2 viti autofilettanti M2,2*8 come nelle immagini seguenti.
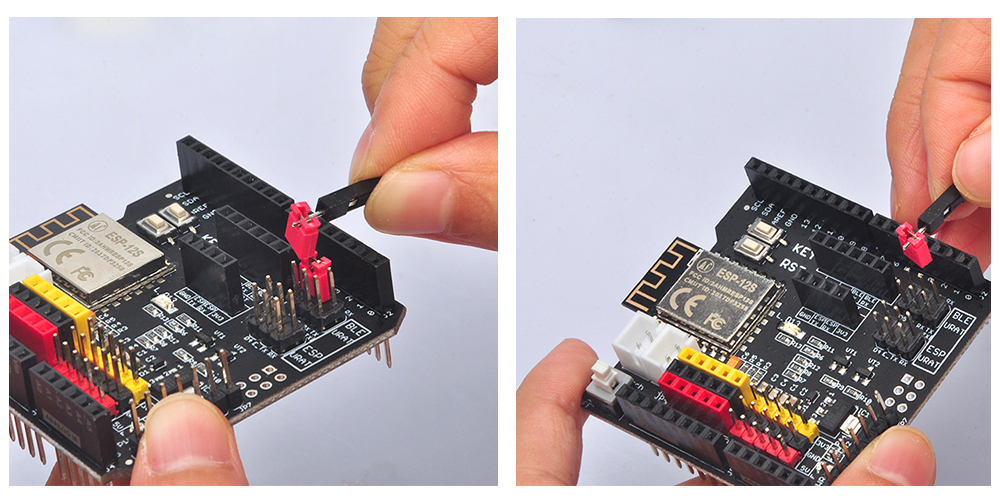
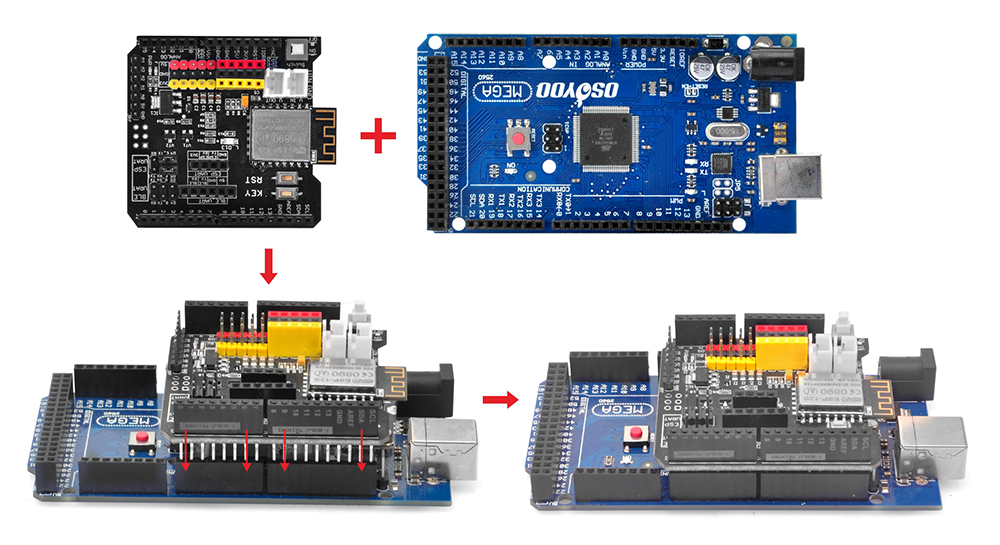
Passo 11. Rimuovere il cappuccio rosso dallo shield wifi e inserire lo shield wifi OSOYOO nella scheda Arduino Mega2560 come nelle immagini seguenti.
Passo 12. Installare il telaio acrilico sul telaio metallico. Si prega di notare la parte anteriore e posteriore del telaio acrilico e del telaio metallico.
Prima di collegare i fili, assicurati di aver già inserito lo shield WIFI OSOYOO sulla scheda MEGA2560.
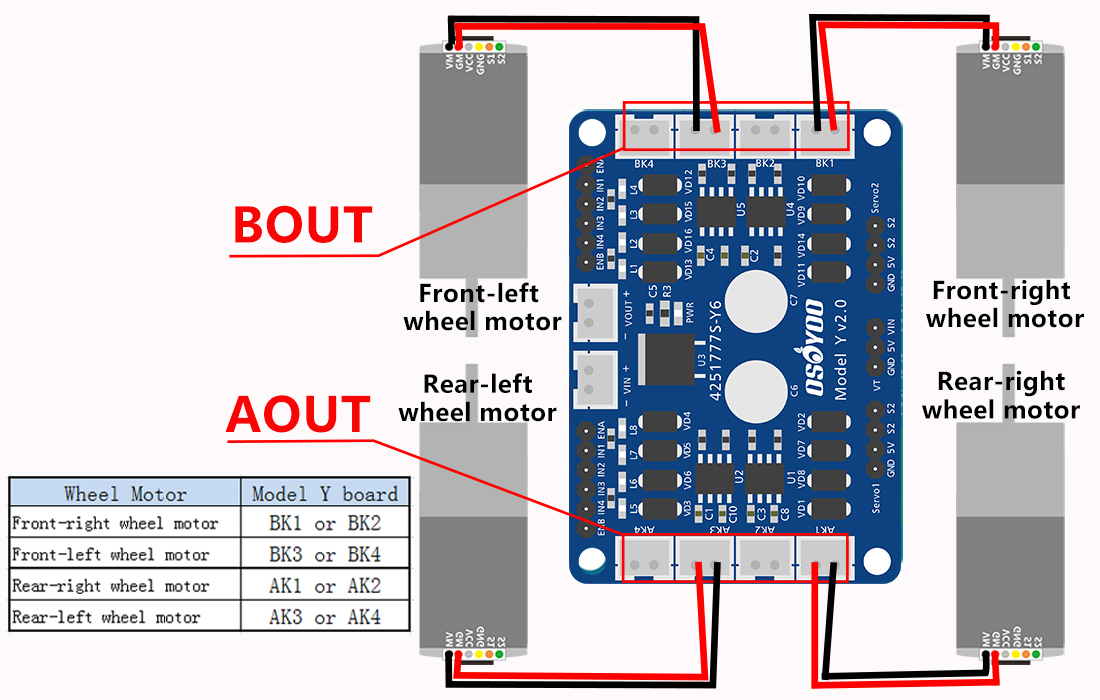
Passo 13. Collega 4 motori alla scheda driver del modello Y come indicato dalle seguenti immagini.
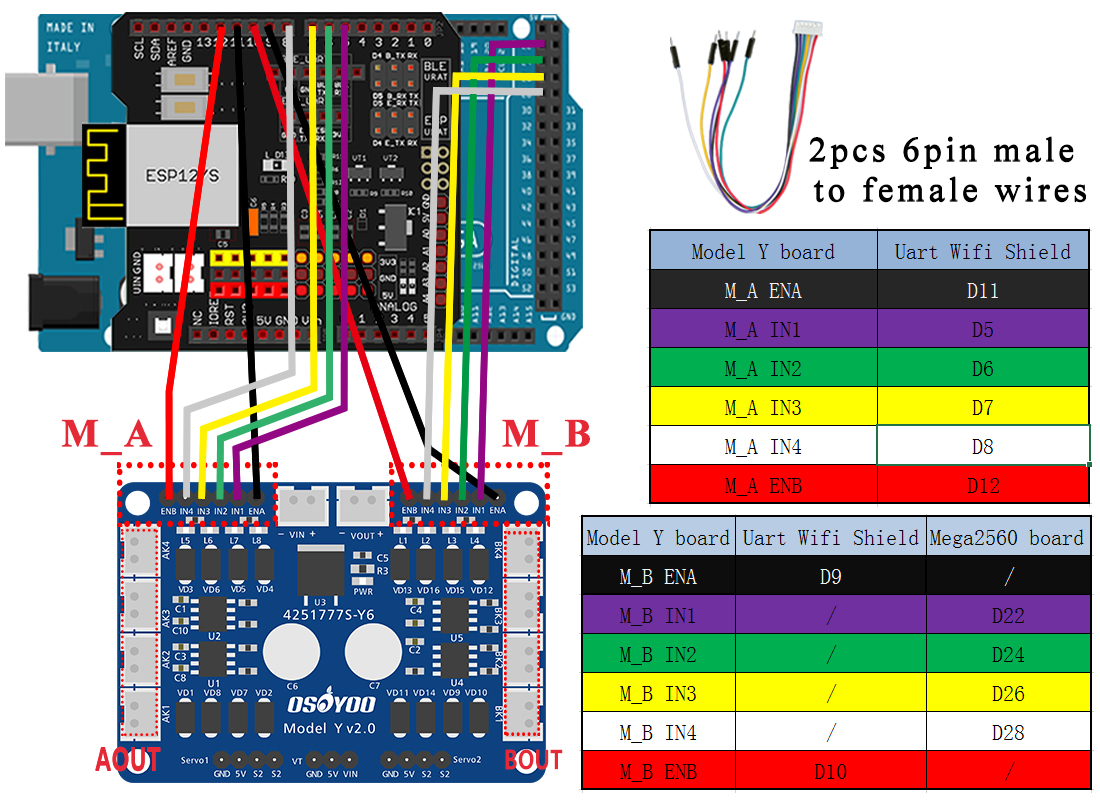
Passo 14.
La scheda modello Y M_A IN1, IN2, IN3, IN4 si collega ai pin D5, D6, D7, D8. La scheda modello Y M_B IN1, IN2, IN3, IN4 si collega ai pin D22, D24, D26, D28.
I pin M_A ENA, ENB si collegano ai pin D11, D12.
I pin M_B ENA, ENB si collegano ai pin D9, D10.
Attenzione: Quando si inserisce/rimuove la spina del cavo parallelo a 6 pin nella presa maschio a 6 pin del modello Y, si prega di tenere il supporto bianco del perno per effettuare l’operazione. Non trascinare i fili per tirare la spina dalla presa, altrimenti si danneggeranno i fili.
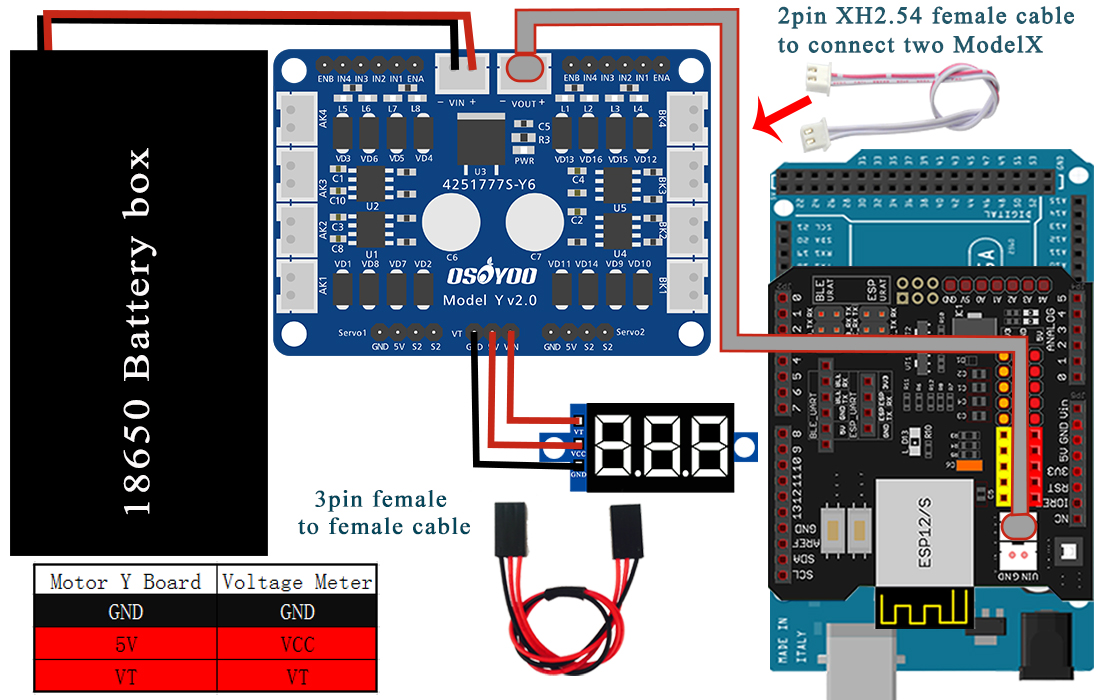
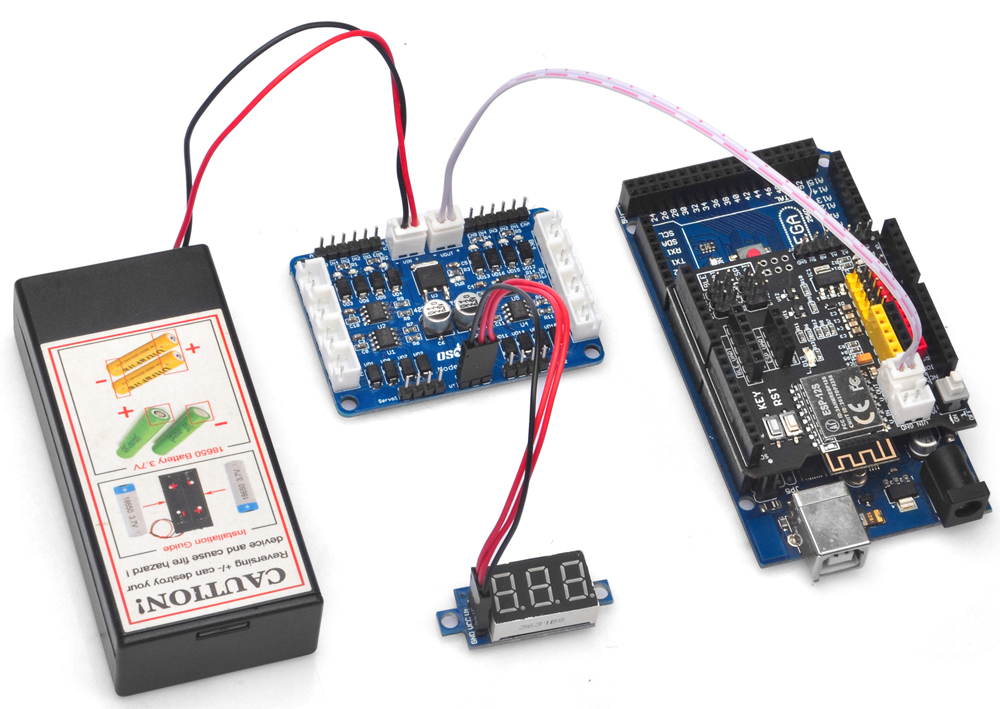
Passo 15. Collega il voltmetro alla scheda driver del motore modello Y con un cavo femmina-femmina a 3 pin come nell’immagine seguente.
Collega la scheda driver del motore modello Y allo shield Wi-Fi con un cavo femmina XH2.54 a 2 pin.
Collega la scatola della batteria 18650 alla scheda driver del motore modello Y come nell’immagine seguente.
Passo 1: Installare l’ultima versione di Arduino IDE (Se si ha una versione di Arduino IDE successiva alla 1.1.16, saltare questo passaggio). Scaricare Arduino IDE da https://www.arduino.cc/en/Main/Software?setlang=en, quindi installare il software.
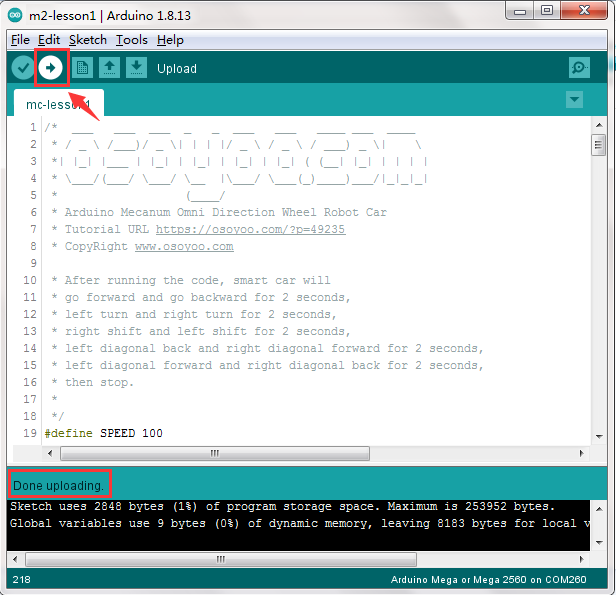
Passo 3: Collegare la scheda Mega2560 al PC con un cavo USB, aprire Arduino IDE -> fare clic su File -> fare clic su Apri -> scegliere il codice “lesson1.ino” nella cartella lesson1, caricare il codice in Arduino.
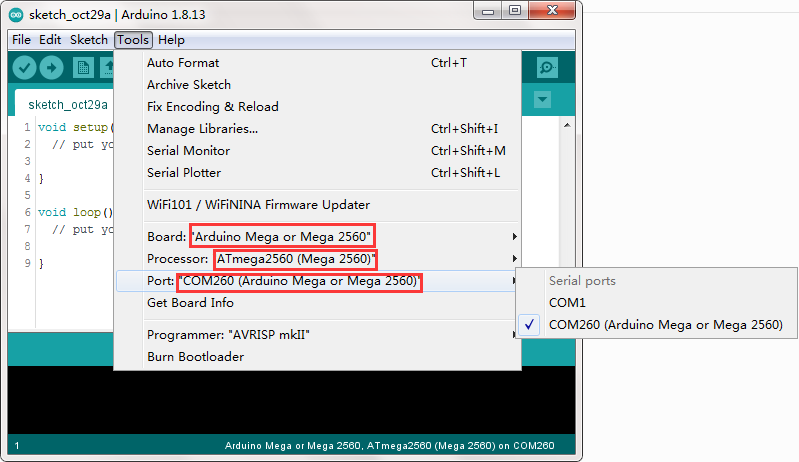
Passo 4: Scegliere la scheda/porta corrispondente per il progetto, caricare lo sketch sulla scheda.
Scollegare Arduino dal PC, inserire la batteria nella scatola della batteria. Quando si posiziona la macchina a terra, accendere l’interruttore sulla scheda OSOYOO Uart WIFI e l’interruttore sulla scatola della batteria.
Dopo aver eseguito il codice della lezione 1, la macchina si muoverà
Avanti → Indietro → Svolta a sinistra → Svolta a destra → Spostamento parallelo a destra → Spostamento parallelo a sinistra → Diagonale superiore destra → Diagonale inferiore sinistra → Diagonale superiore sinistra → Diagonale inferiore destra
Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.

















Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.