I.目的 II.パーツとデバイス III.ハードウェアの取り付け IV.ソフトウェアのインストール VI.遊び方
Buy from US
Buy from UK
Besorgen DE
Acquistare IT
Acheter FR
Comprar ES
ここでご購入を!
VIDEO
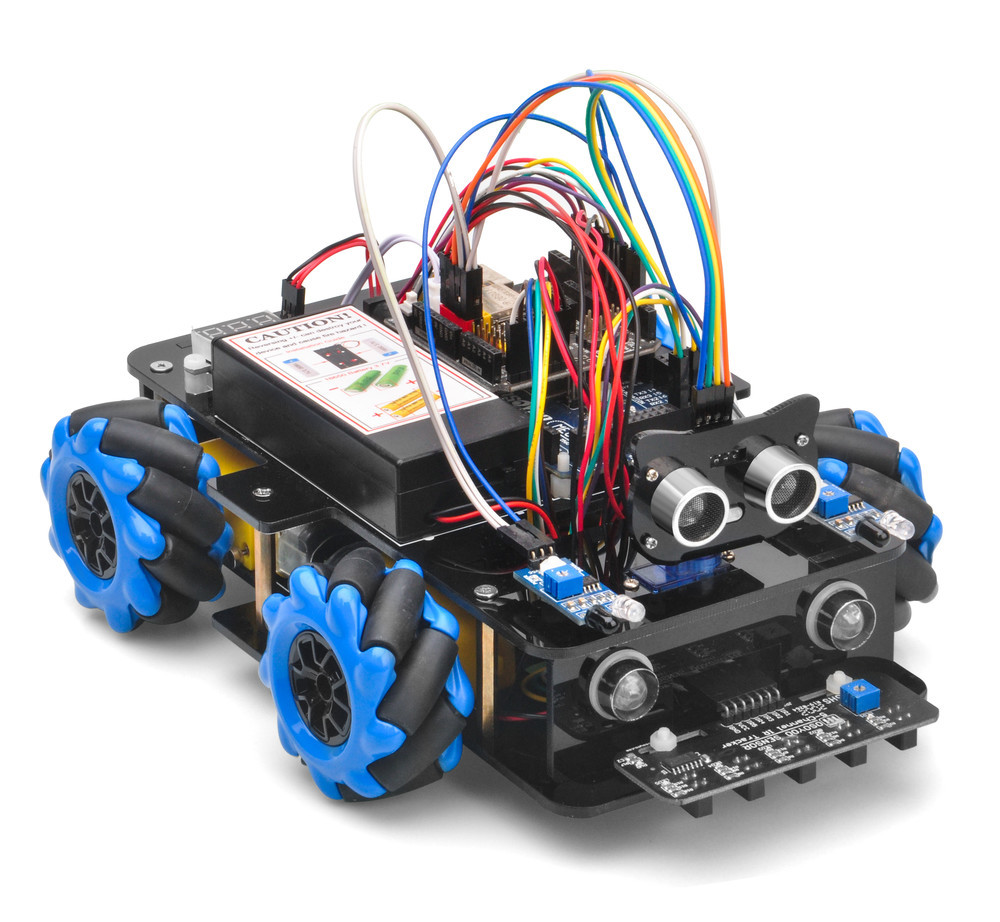
このレッスンでは、ロボットカーに2つのIR距離センサを取り付け、カーが物体の動きに追従するようにプログラムします。カーはIR距離センサから信号を受信し、プログラムによってカーが動作を起こします。lesson 1 (カーの組み立て)を完了する必要があります。
PDFチュートリアルをダウンロード:https://osoyoo.com/manual/2021006600.pdf OSOYOOロボットカーのインストールビデオ : https://osoyoo.com/manual/2021006600.html
OSOYOOメカナムホイールロボットカーシャーシ x1
Step 1:スマートカーレッスン1に従って、スマートカーの基本的なフレームワークをインストールしてください(すでにレッスン1でインストール済みの場合はそのままにしてください)。
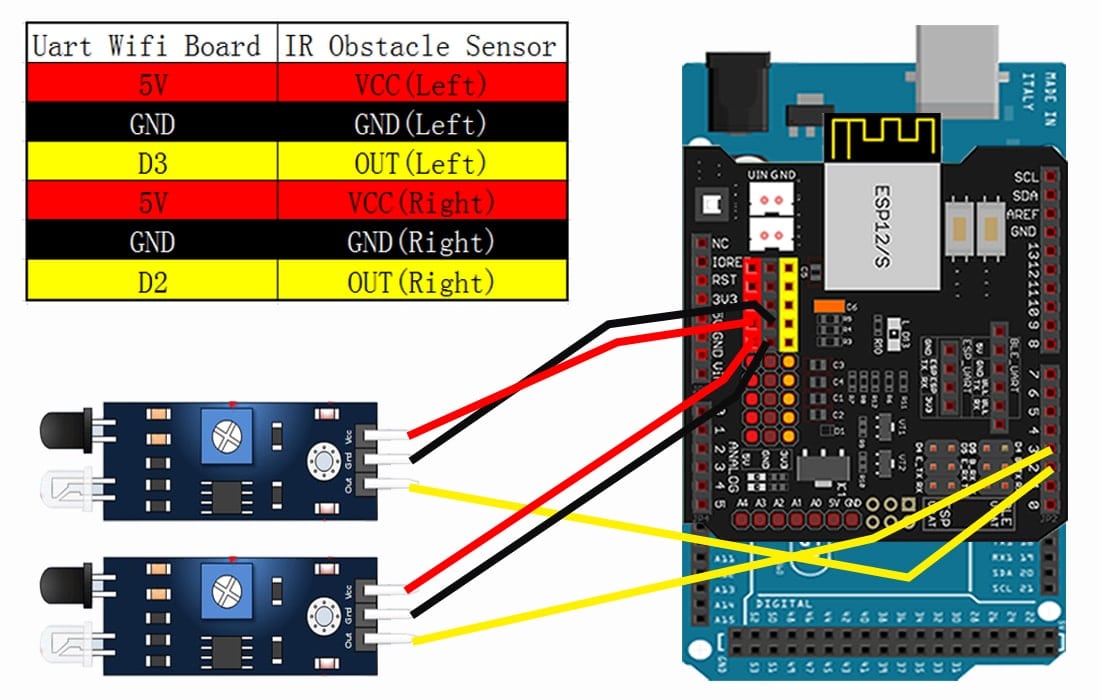
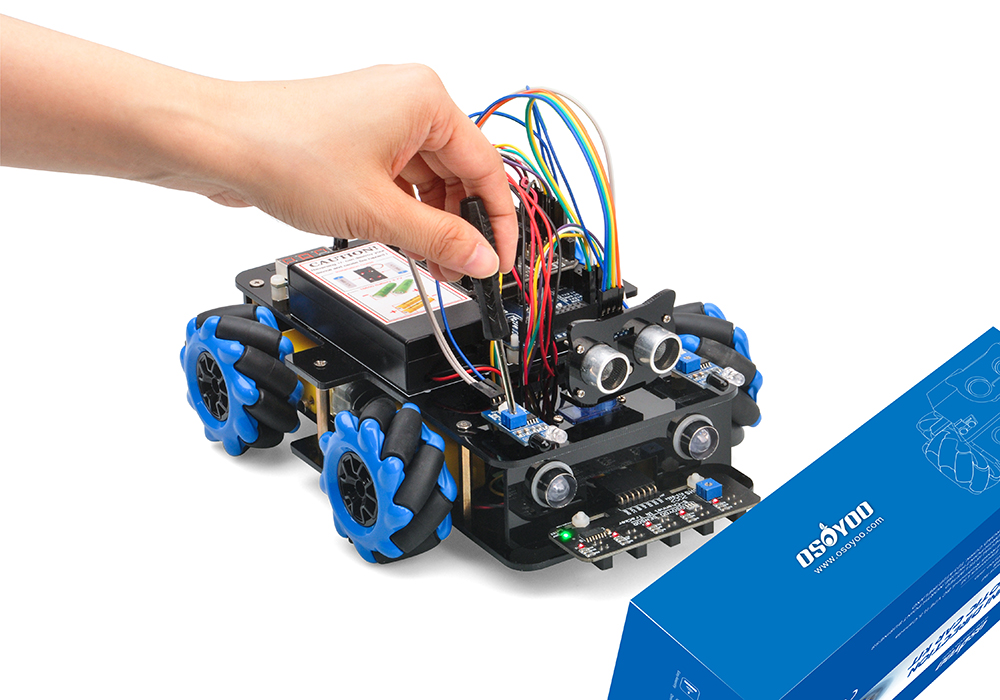
Step 2: 以下の接続図に従って、2つのIR距離センサーモジュールを接続してください(レッスン1でインストールした既存のワイヤーを取り外さないでください)。
ステップ 1:最新のArduino IDEをインストールしてください(Arduino IDEバージョン1.1.16以降をお持ちの場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=enからArduino IDEをダウンロードし、ソフトウェアをインストールしてください。
ステップ 2: https://osoyoo.com/driver/mecanum_acrylic_chassis_v2/mc-lesson4.zip からダウンロードし、mc-lesson4.zipという名前のフォルダがあることを確認して、ダウンロードしたzipファイルを解凍してください。
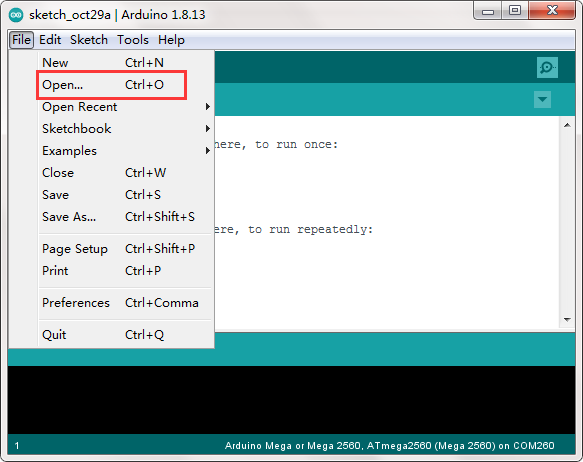
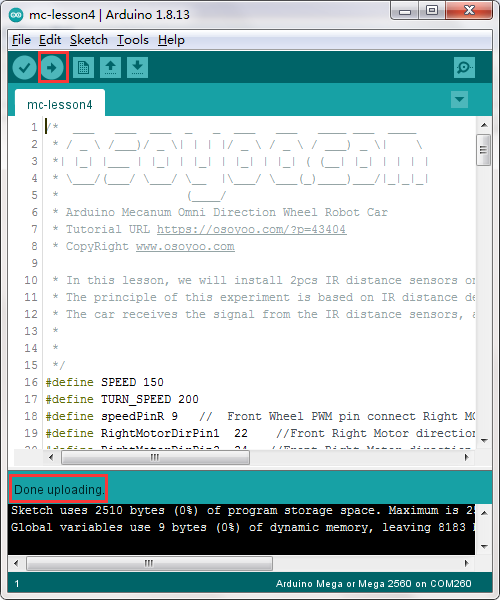
ステップ 3: Mega2560ボードをUSBケーブルでPCに接続し、Arduino IDEを開きます->ファイル->開く->lesson4フォルダの”lesson4.ino”というコードを選択し、コードをArduinoにロードします。
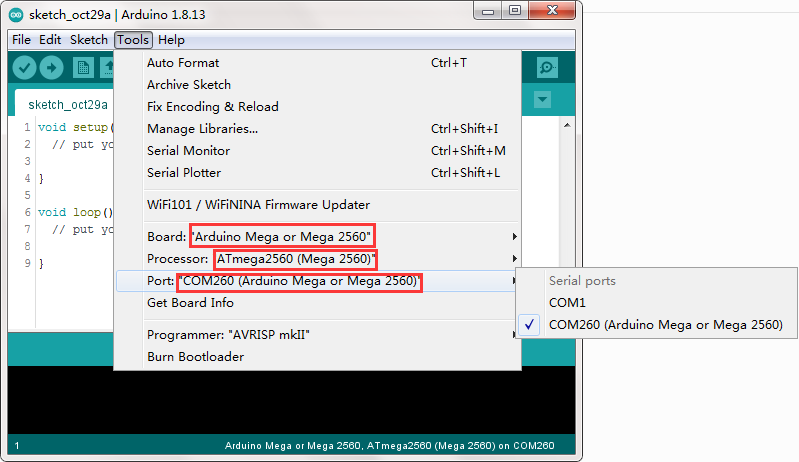
ステップ 4: プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。
ステップ 5: 車をオンにし、各IR距離センサーの前約10cmにオブジェクトを配置し、IR距離センサーのポテンショメーターを調整してオブジェクトまたは手を検出します。
注意:これらのIRモジュールがオブジェクトを検出すると、電源インジケーターと信号インジケーターの両方が点灯します。オブジェクトが検出されない場合は、電源インジケーターのみが点灯し、信号インジケーターは消灯します。センサーの前に障害物がなくても信号インジケーターが常に点灯している場合は、ポテンショメータを調整する必要があります。
車をオンにし、車の前に手を置くと、手を引くかのように車が動きます。両方のIR障害回避モジュールが手を検出すると前進し、右側のIR障害回避モジュールだけがオブジェクトを検出すると右に曲がり、左側のIR距離センサーだけがオブジェクトを検出すると左に曲がります。
手が前方10cmを超えると、車は停止します。












yes. all the 6 example lessons related to this V2.0 Mecanum car use the same parts in the package box. No need buy extra parts. But you might need to change some wire connection. Please read the tutorial carefully.