In questa lezione, installeremo 2 sensori di distanza IR su un’auto robot e programmeremo l’auto per seguire i movimenti degli oggetti. L’auto riceve il segnale dai sensori di distanza IR, e quindi il programma guiderà l’auto a compiere azioni.
È necessario completare la lezione 1 (assemblaggio dell’auto) prima di iniziare questa lezione.
Telaio per auto robot con ruote Mecanum OSOYOO x1
Ruote e motori OSOYOO x4 (ruote sinistre x2 / ruote destre x2)
Scheda OSOYOO Mega2560, completamente compatibile con Arduino UNO / Mega2560 x1
Shield Wi-Fi Uart OSOYOO x1
Scheda driver modello Y OSOYOO x1
Voltmetro OSOYOO x1
Sensori di distanza IR OSOYOO x2
Scatola per batterie OSOYOO x1
Cavo di collegamento a 3 pin femmina-femmina OSOYOO x1
Cavo di collegamento a 6 pin maschio-femmina OSOYOO x2
Cavo di collegamento a 10 pin maschio-femmina OSOYOO x1
Cavo XH.25 femmina-femmina a 2 pin OSOYOO x1
Batterie 18650 (3,7V) x2
Caricabatterie x1
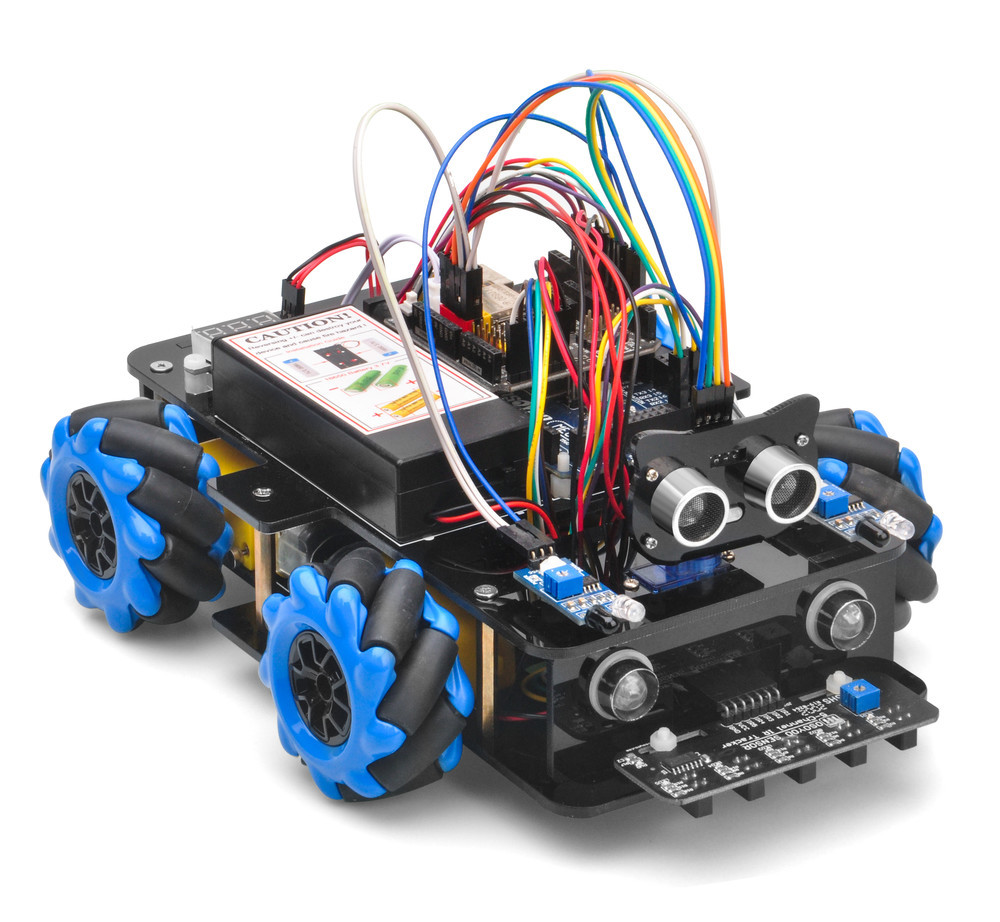
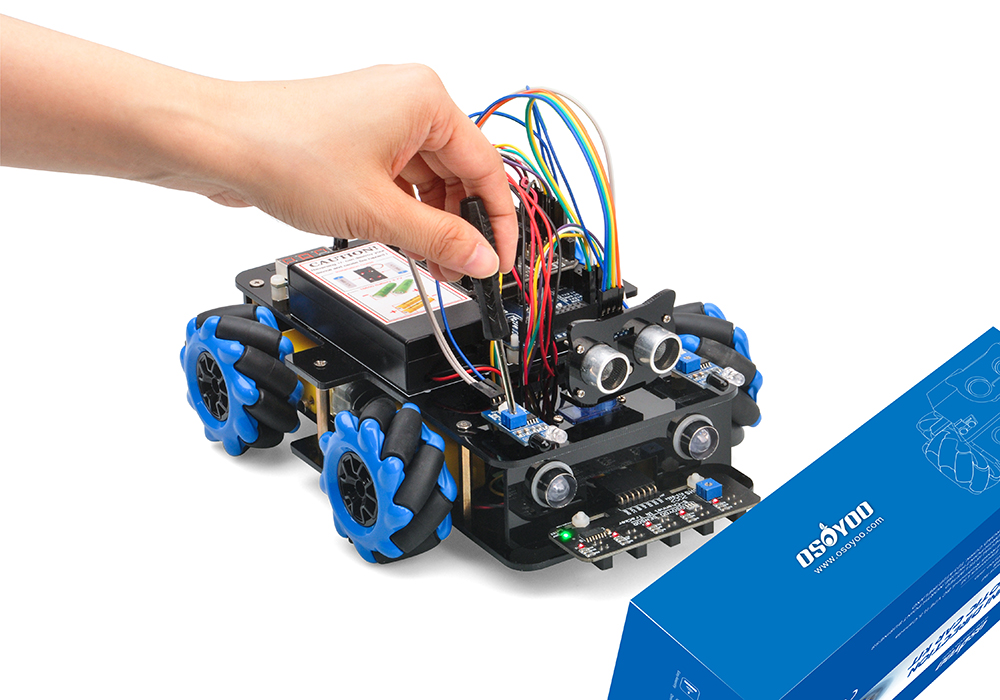
Passaggio 1: Installa il telaio di base della smart car come indicato nella Lezione 1 della Smart Car. Se hai già completato l’installazione nella Lezione 1, lascialo così com’è.
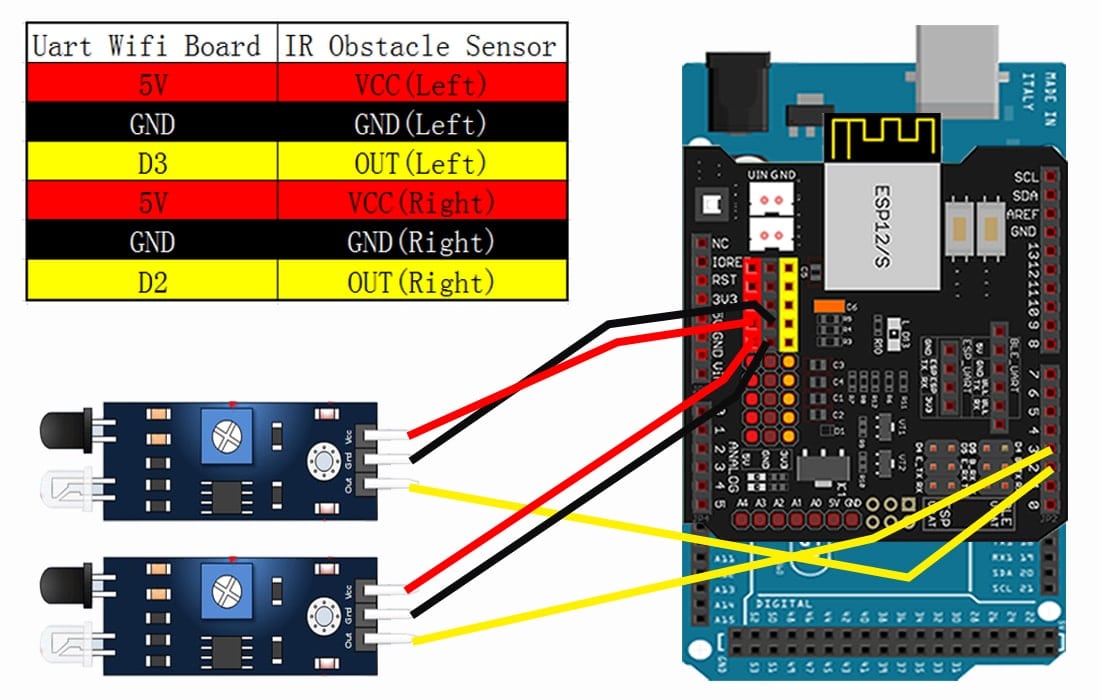
Passaggio 2: Collega 2 moduli di sensori di distanza IR come indicato nel seguente diagramma di connessione. (Ricorda: NON rimuovere nessun cavo già installato nella Lezione 1).
Passaggio 1: Installa l’ultima versione dell’Arduino IDE (Se hai già la versione dell’Arduino IDE successiva alla 1.1.16, salta questo passaggio). Scarica l’Arduino IDE da https://www.arduino.cc/en/Main/Software?setlang=en, quindi installa il software.
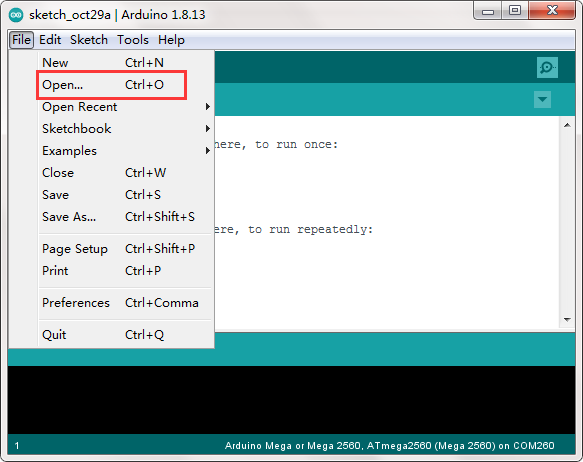
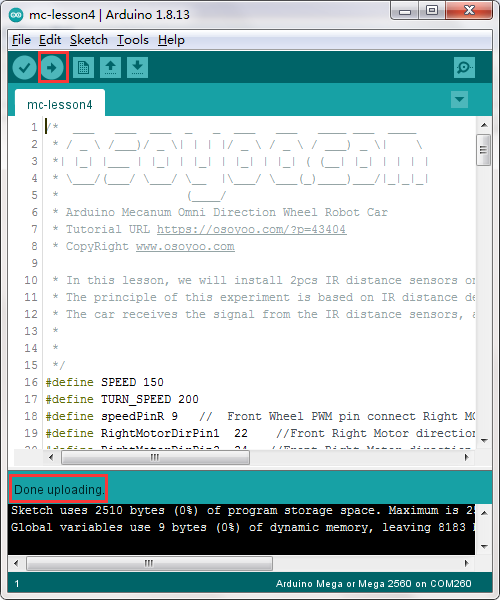
Passaggio 3: Collega la scheda Mega2560 al PC tramite cavo USB, Apri Arduino IDE → clicca su File → clicca su Apri → scegli il codice “lesson4.ino” nella cartella lesson4, carica il codice nell’Arduino.
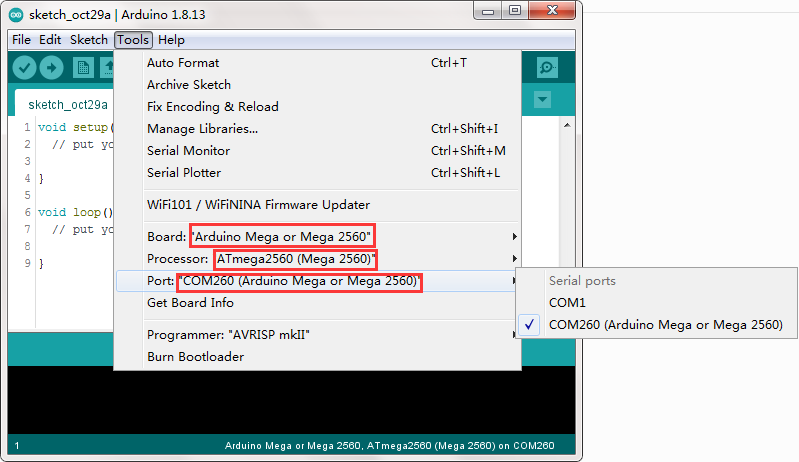
Passaggio 4: Scegli la scheda/porta corrispondente al tuo progetto, carica lo sketch sulla scheda.
Passaggio 5: Accendi l’auto, posiziona un oggetto a circa 10 cm di distanza da ciascun sensore di distanza IR e regola il potenziometro sui sensori di distanza IR per rilevare l’oggetto o la tua mano.
Nota: Quando questi moduli IR rilevano oggetti, sia l’indicatore di alimentazione che l’indicatore di segnale si accendono. Quando non viene rilevato alcun oggetto, solo l’indicatore di alimentazione si accende, mentre l’indicatore di segnale si spegne. Se l’indicatore di segnale rimane sempre acceso anche se non c’è ostacolo davanti al sensore, è necessario regolare il potenziometro.
Accendi l’auto, posiziona la tua mano davanti all’auto, quindi l’auto si muoverà verso la tua mano come se la stessi tirando. L’auto si muove in avanti quando entrambi i moduli di evitamento ostacoli IR rilevano la tua mano; si gira a destra se solo il modulo di evitamento ostacoli IR destro rileva un oggetto; si gira a sinistra se solo il sensore di distanza IR sinistro rileva un oggetto. Quando la tua mano si trova a più di 10 cm di distanza, l’auto si fermerà.
yes. all the 6 example lessons related to this V2.0 Mecanum car use the same parts in the package box. No need buy extra parts. But you might need to change some wire connection. Please read the tutorial carefully.











yes. all the 6 example lessons related to this V2.0 Mecanum car use the same parts in the package box. No need buy extra parts. But you might need to change some wire connection. Please read the tutorial carefully.