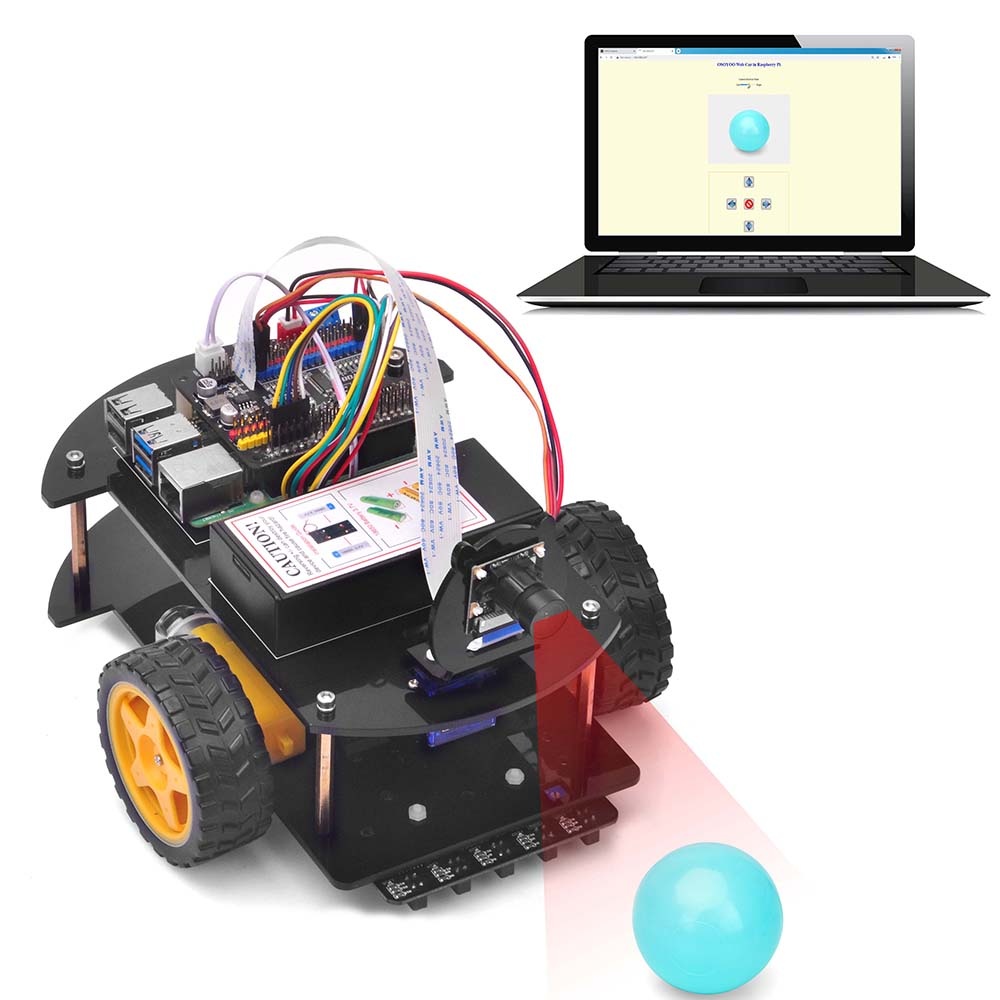
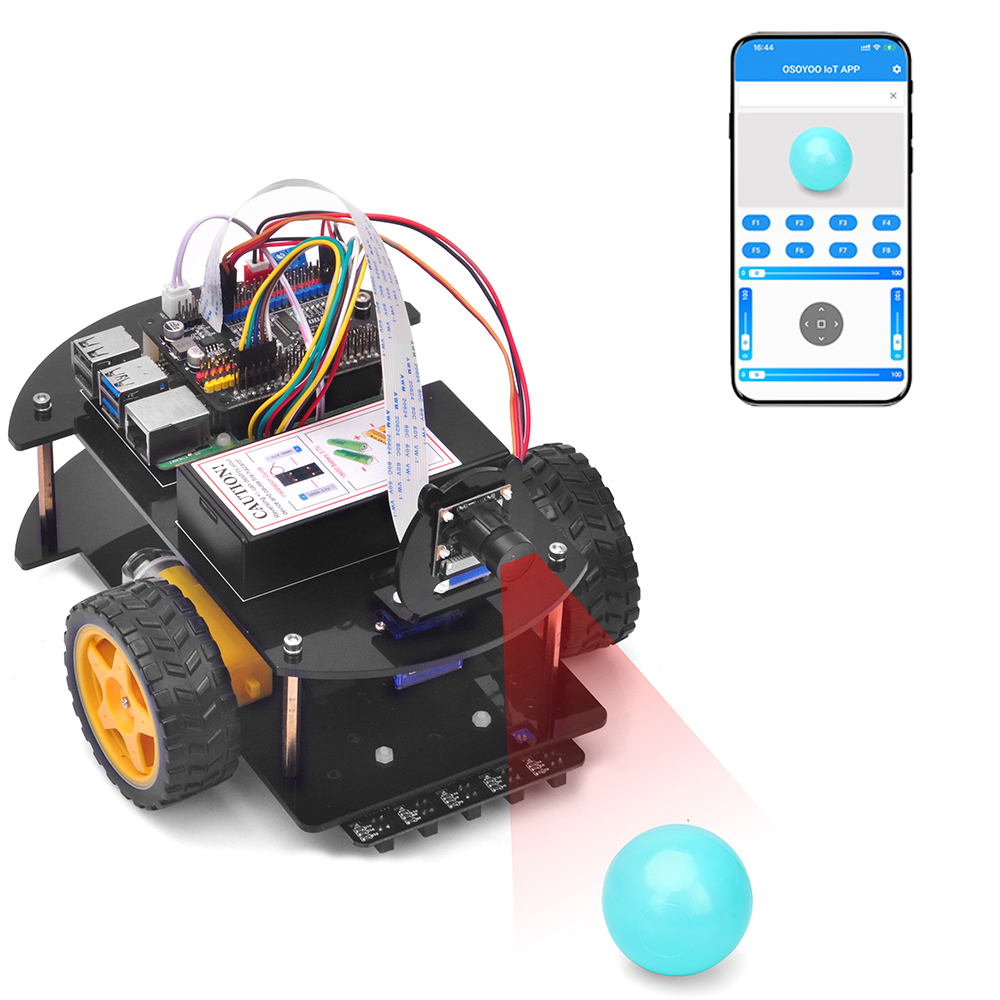
En esta lección, le mostraremos cómo usar el software Python3 Flask y M-Jpeg Streamer para controlar un Raspberry Pi Robot Car a través de Internet. Monitorearás el movimiento en tiempo real del automóvil a través de su ojo (cámara frontal).
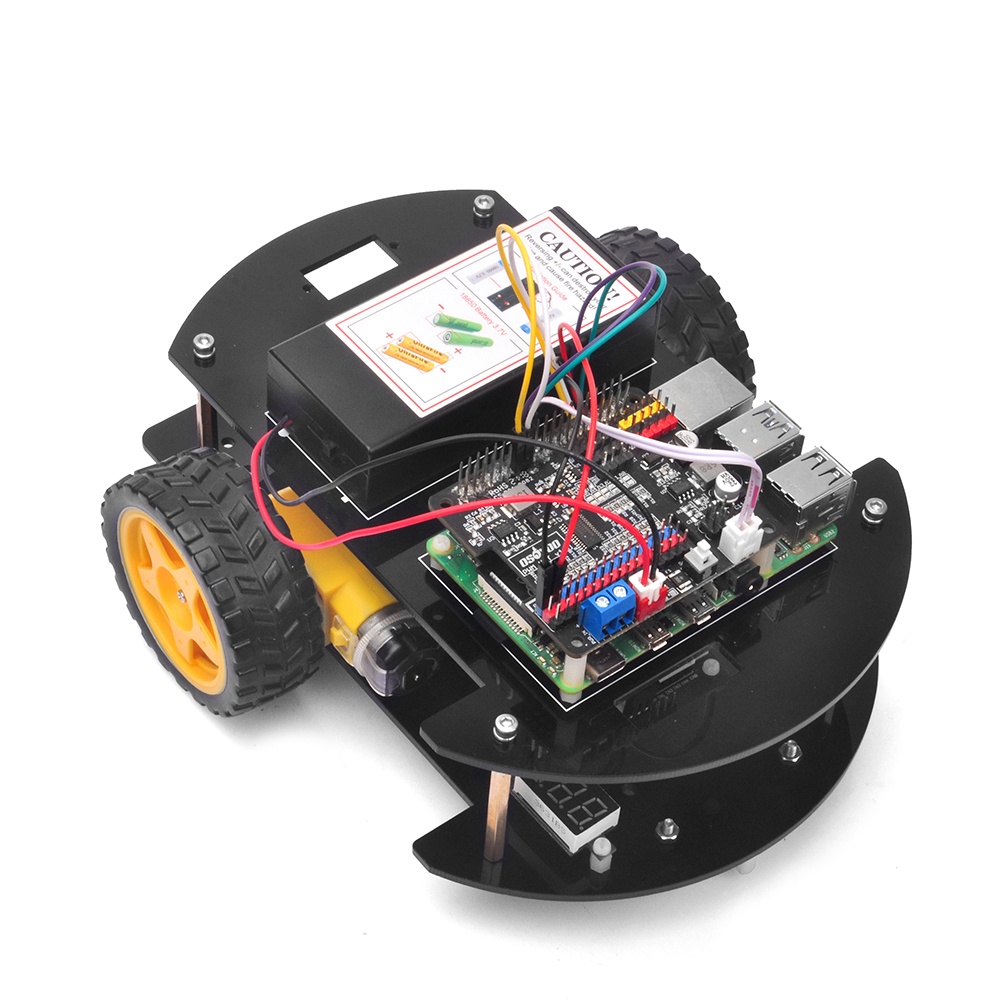
Paso 1: Debe completar el marco básico de la lección 1. Si ha completado la lección 3 antes, retire el soporte de montaje del sensor ultrasónico del servomotor y los cables del sensor ultrasónico, luego continúe con esta lección
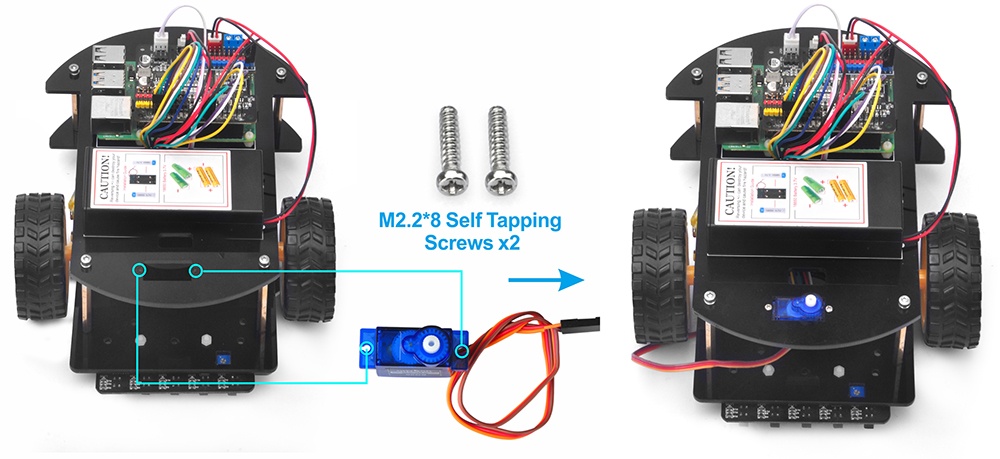
Paso 2: Instale el servomotor en la parte delantera del chasis superior del automóvil con tornillos autorroscantes 2pcs M2.2 * 8
Paso 3: Elija el soporte ranurado en el servomotor para cruzar el soporte de la cámara de arriba a abajo y fijar la hoja con tornillos autorroscantes M1.5 * 6
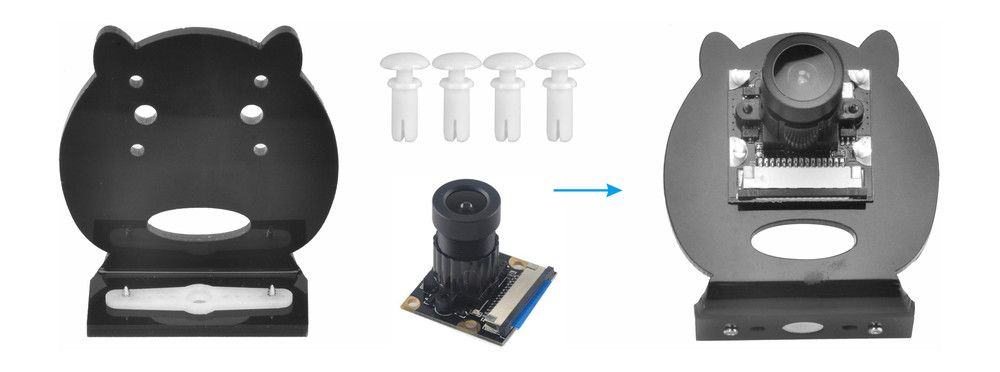
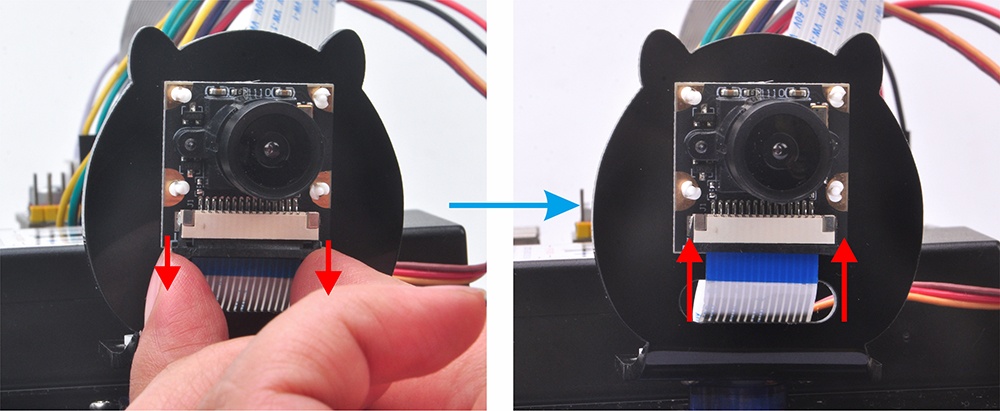
Paso 4: Instale la cámara CSI en el soporte con remaches de pines de empuje 4pcs M2
Paso 5: Instale el soporte de la cámara en el servomotor con tornillos autorroscantes 1pc M2 * 4
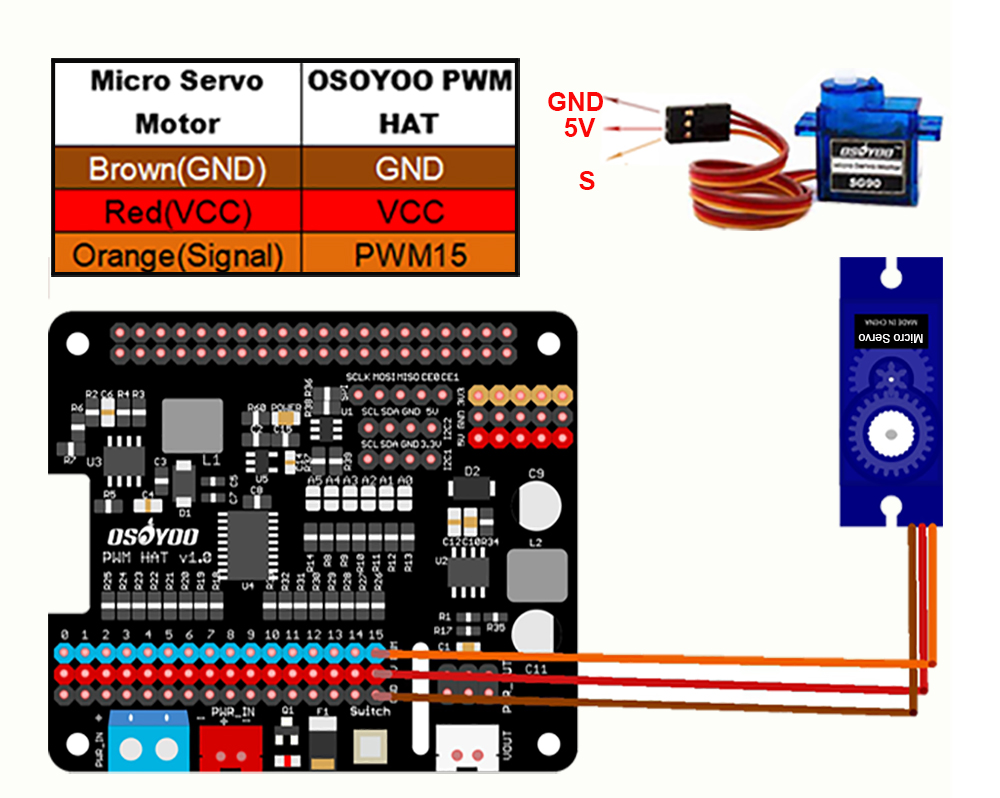
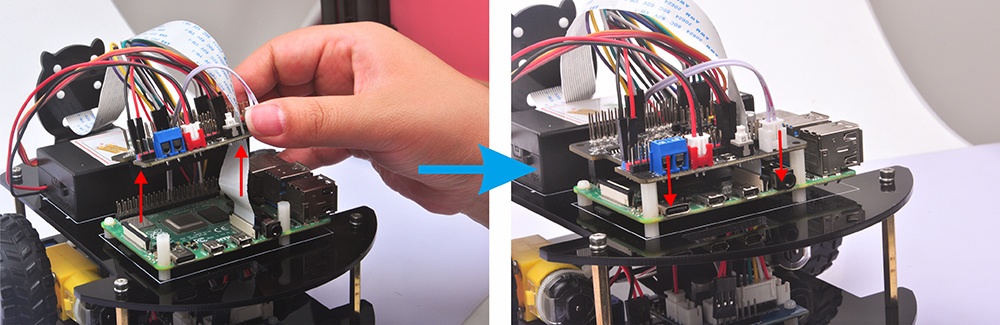
Paso 1) El servo debe estar instalado y conectado PWM 15 puerto
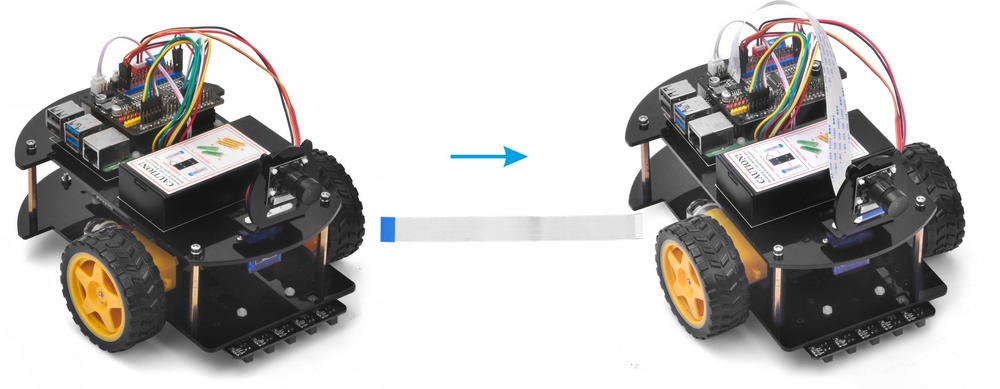
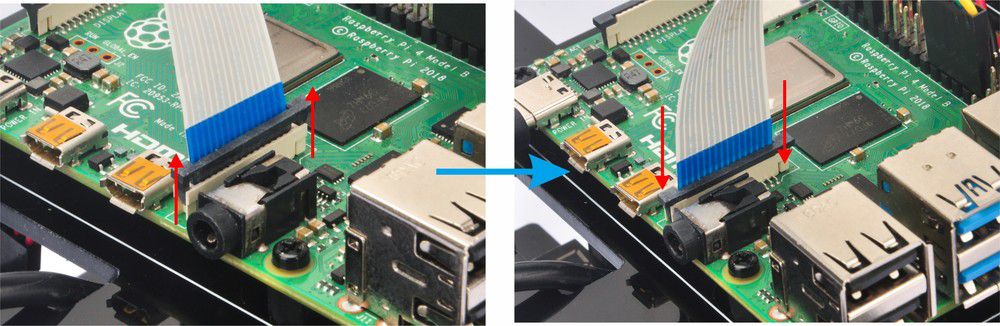
Paso 2) Conecte la cámara CSI a la ranura CSI de Raspberry Pi con cable de cinta CSI (preste atención a las conexiones del cable antes de instalarlo).
Step 1: Make sure you have installed rpi.gpio, adafruit-pca9685 library and enable I2C in lesson 1 , and power on the robot car.
Step 2: Please enable Camera in Raspberry Pi by typing following command (Nota: Si grabas BOOKWORM y Trixie OS, no es necesario que habilites la cámara.)
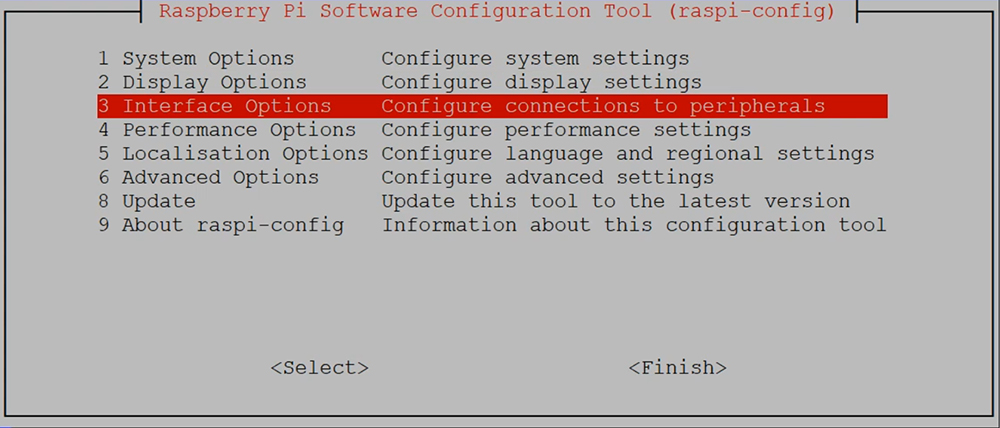
sudo raspi-config
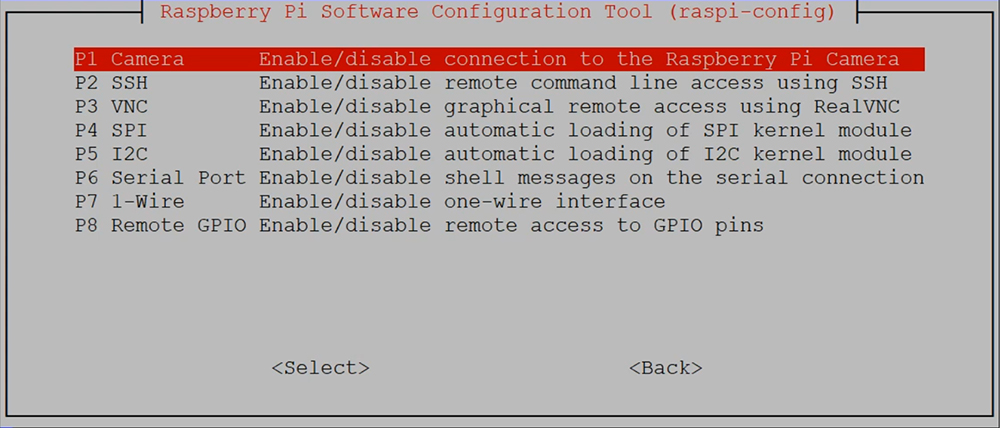
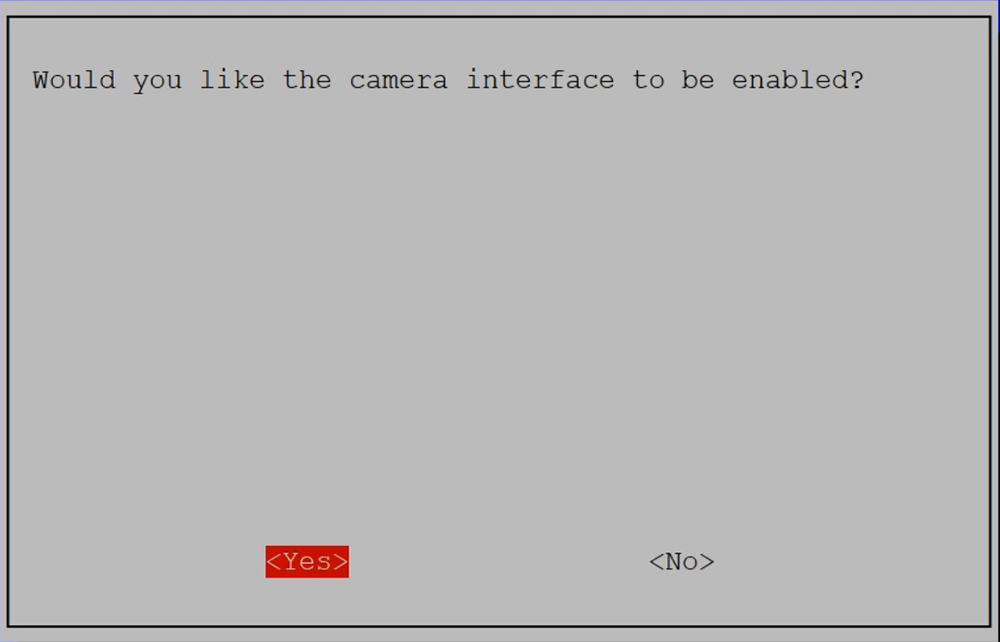
Entonces select → Interface Options→ Camera→ Yes→ Ok→ Finish (Por favor, reinicie la Raspberry Pi de acuerdo con el aviso.)
Paso 3: Escriba el siguiente comando para instalar el software mjpeg-streamer:
wget https://osoyoo.com/driver/picar/camera.sh
Paso 4: el siguiente comando por fin:
bash camera.sh
Después de ejecutar los comandos anteriores, el software mjpeg-streamer se instala en su Raspberry Pi. ¡Así de simple!
NOTA: ¡El software Camera Stream y bash camera.sh solo hay que instalarlos y ejecutarlos UNA VEZ! Por lo tanto, si desea ejecutar Camera Stream en el futuro, solo tiene que seguir el siguiente paso (PASO 5) y ejecutar el archivo python startcam.py.
Paso 5: Inicie el servidor jpeg-streamer en su Raspberry Pi Ejecute el siguiente comando en su terminal Pi iniciará su servidor mjpeg-streamer
python startcam.py
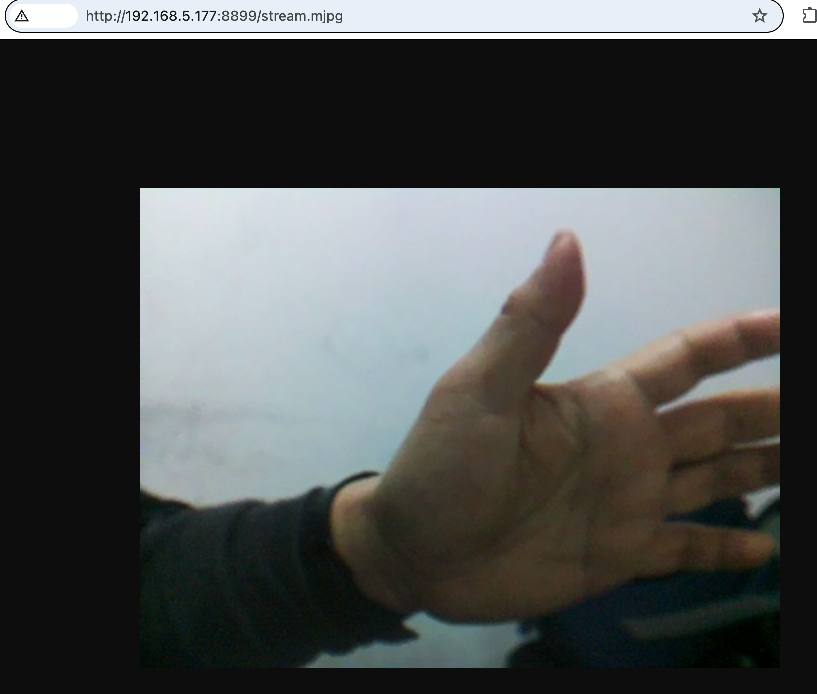
Paso 7: Ahora puede utilizar su navegador para probar el vídeo de vigilancia. Visite http://your_raspberry_pi_ip:8899/stream.mjpg (en mi caso, http://192.168.68.227:8899/stream.mjpg) y verá el vídeo de vigilancia.
MÉTODO 1: UTILICE EL NAVEGADOR PARA CONTROLAR UN COCHE ROBOT RASPBERRY PI A TRAVÉS DE INTERNET
Paso 1: Abra una nueva ventana de terminal y ejecute el siguiente código para instalar el software de coche robot controlado por cámara web OSOYOO
wget https://osoyoo.com/driver/picar/picar4.sh
Paso 2: escriba el siguiente comando:
bash picar4.sh
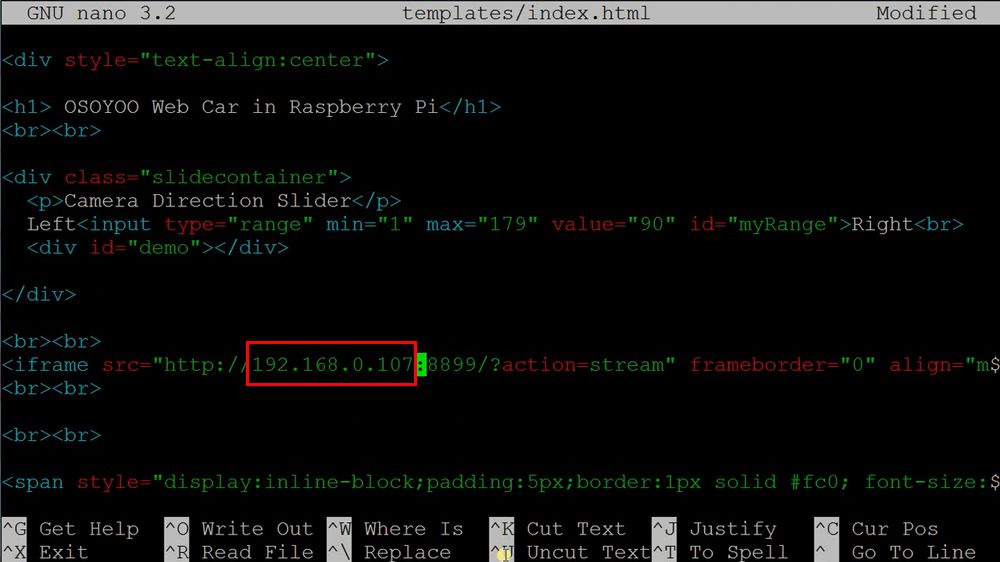
Paso 3: A continuación, escriba el comando siguiente para editar el archivo templates/index.html
nano ~/piwebcar/templates/index.html
Paso 4: Reemplaza 10.0.0.23 con la dirección IP de tu pi, y haz clic en «Ctrl» + «X» y luego en «Y» para guardar el archivo, y luego haz clic en «Intro» para salir del archivo.
Paso 8: coloque el automóvil en el suelo y ejecute el código escribiendo el siguiente comando
sudo python ~/piwebcar/webcar.py
Paso 9: En su PC o teléfono celular que es la misma red Wi-Fi de su Raspberry Pi, abra el navegador y visite http://your_RaspberryPi_ip_address.
Los botones de flecha son teclas de control de dirección, el botón circular rojo en el medio es la tecla STOP. Hay cuatro botones de control de velocidad en la parte inferior:
0 tecla significa la velocidad más lenta
— tecla significa la 2ª velocidad lenta
== clave significa velocidad regular
++ tecla significa la velocidad más rápida
En la parte superior de la página, hay un control deslizante de dirección de la cámara, puede mover el control deslizante para girar el servo y cambiar la orientación de la cámara.
MÉTODO 2: USE LA APLICACIÓN PARA CONTROLAR UN COCHE ROBOT RASPBERRY PI A TRAVÉS DE INTERNET
Paso 1: Abra una nueva ventana de terminal y ejecute el código siguiente para descargar el código de ejemplo para el control APP
Paso 2: Escriba el siguiente comando para ejecutar el código de ejemplo :
python picar-udp-control4.py
Paso 3) Descargar OSOYOO IoT UDP Robot Car control APP En Google Play o Apple Store, busque las palabras clave “OSOYOO IoT UDP Robot APP”, encontrará una aplicación de icono rojo de la siguiente manera(Nota: Si no encuentras esta APP en Google Play, puedes descargar directamente la APP desde el siguiente enlace: https://osoyoo.com/driver/udp-app.apk ):
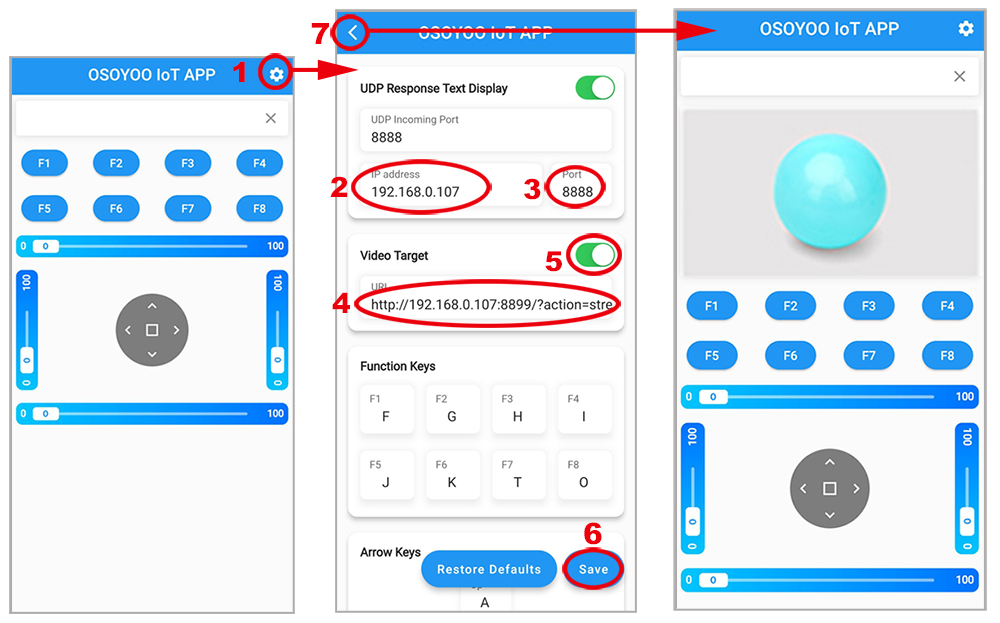
Paso 4) Conecta tu teléfono con el mismo router Wi-Fi SSID de Raspberry Pi. Abra la APP, haga clic en “setting icon(1)” para entrar en “setting UI”, introduzca la dirección IP a su dirección IP Raspberry Pi y [Port] a 8888, introduzca http://your_raspberry_pi_ip:8899/?action=stream a video Target, a continuación, gire el interruptor Video Target a verde, a continuación, haga clic en [save], a continuación, haga clic en “back icon(7)” para volver a controlar la interfaz de usuario de la siguiente manera:
Paso 5) Ahora, coloque el automóvil en el suelo y puede hacer clic en las teclas de dirección < > ^ v para que el automóvil se mueva. Uso || Tecla de pausa para detener el movimiento del automóvil.
El control deslizante en la parte superior de las teclas de dirección es un control deslizante de dirección de la cámara, y puede mover el control deslizante para girar el servo y cambiar la orientación de la cámara.
El control deslizante a la izquierda de las teclas de dirección es un control deslizante de velocidad, y puede mover el control deslizante hacia arriba para acelerar este robot.
Nota: F1~F8 y el control deslizante inferior y derecho no están disponibles en esta lección.