¡Bienvenido a la primera lección de OSOYOO Robot Car para Raspberry Pi!
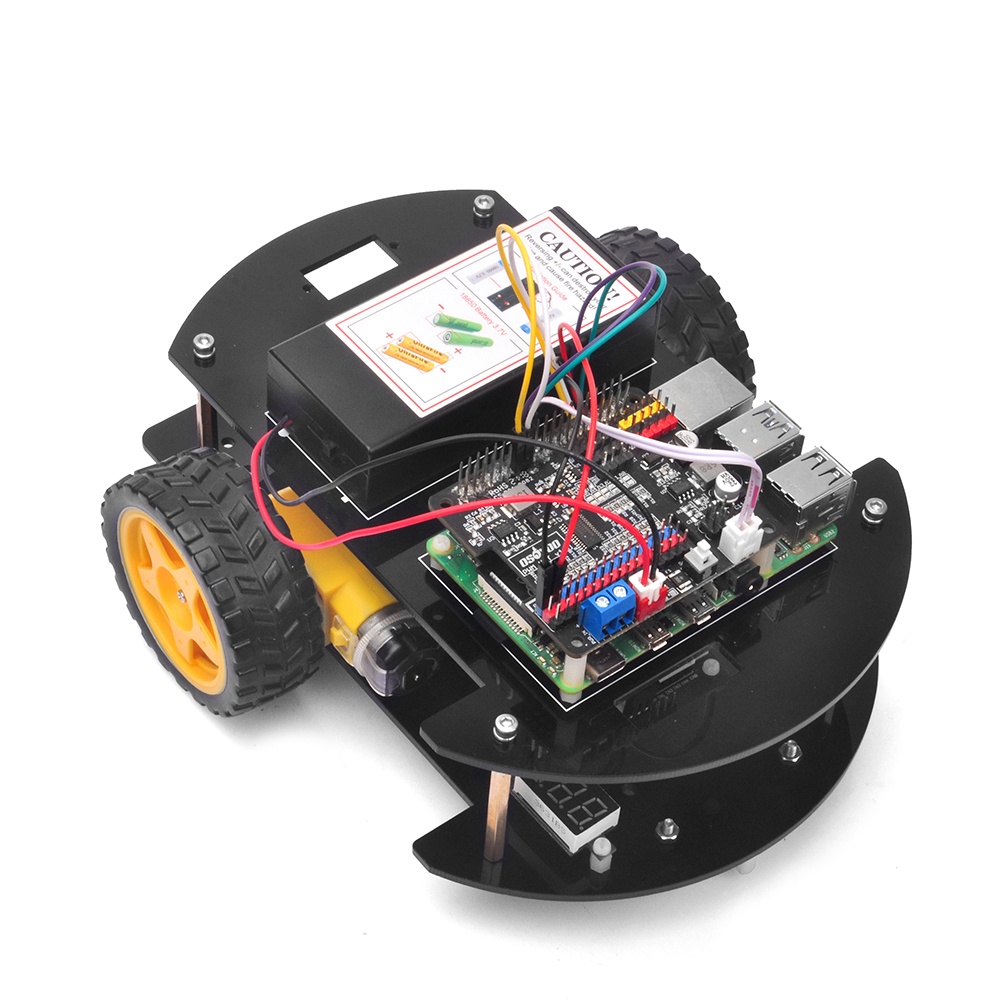
En esta lección, presentaremos cómo instalar el marco del OSOYOO Robot Car para Raspberry Pi en primer lugar, luego simplemente le diremos cómo instalar Raspberry Pi OS para Raspberry pi y cómo usar la consola para controlar Raspberry pi. Usaremos OSOYOO Robot Car para Raspberry Pi para hacer algunos movimientos simples.
Si ha pasado el movimiento de prueba de esta lección, significa que Raspberry pi, motores, batería, placa modelo X, OSOYOO PWM HAT y conexiones de cable entre estas partes funcionan bien, y puede pasar a otras lecciones de muestra
Todas las lecciones se basan en el marco de esta lección. Por favor, siga esta lección cuidadosamente.
No.
Imagen
Dispositivo
Qty.
Accesorios
Enlace
1
Raspberry pi board 2/3/4
(no en paquete)
1
M2.5 Tornillo de plástico x4
M2.5 Tuerca de plástico x2
M2.5 Pilar de plástico x4
M2.5 * 12 pilares de plástico x2
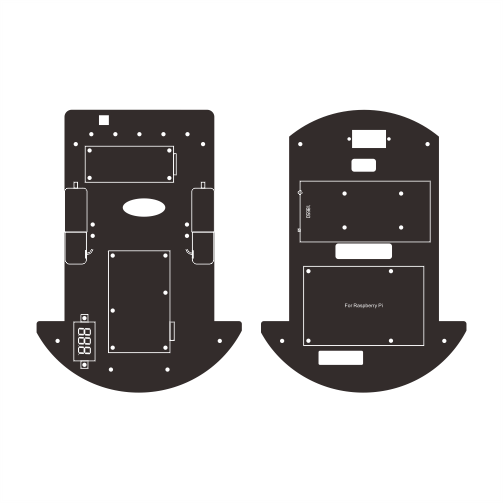
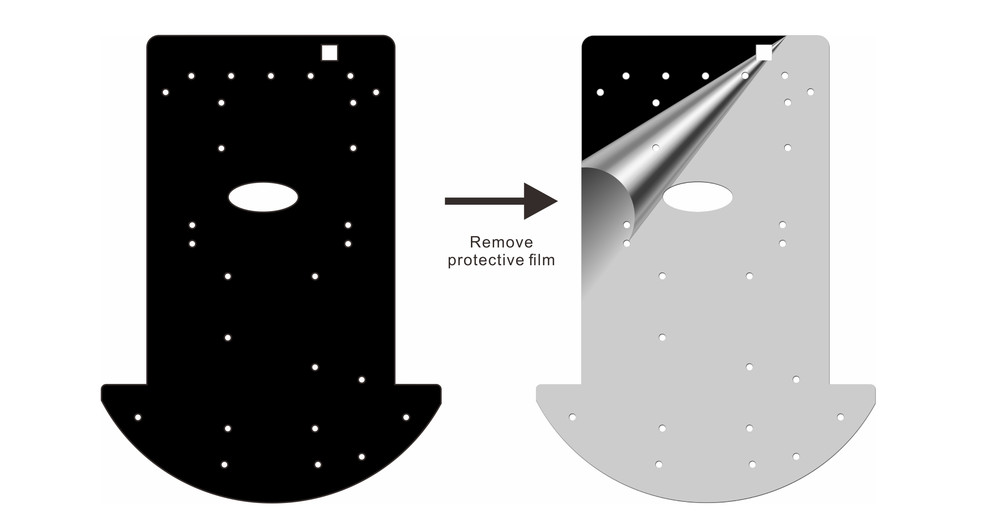
1) Retire la película protectora en el chasis superior e inferior del automóvil (cada chasis de automóvil tiene una película protectora).
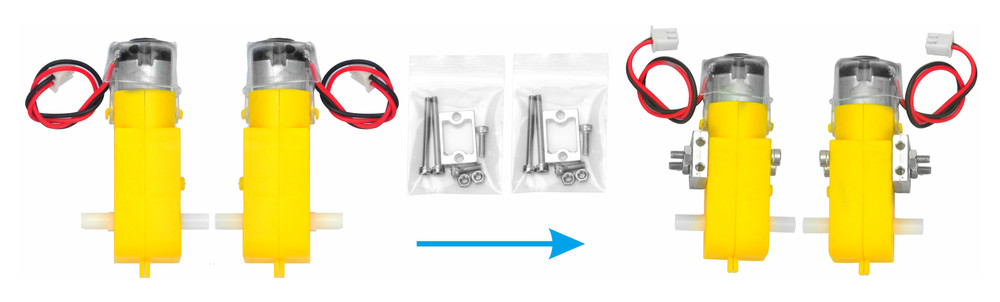
2) Instale 2 motores con soportes de motor de metal de la siguiente manera.
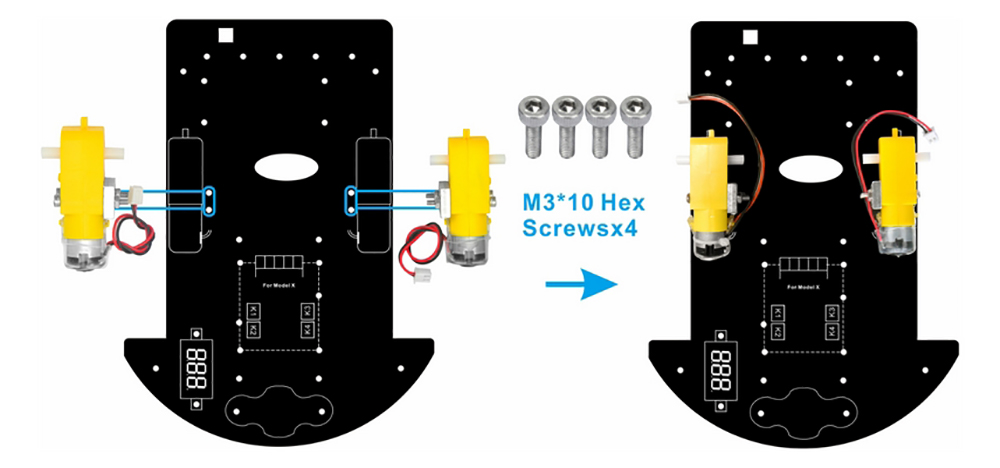
3) Instale 2 motores en el chasis inferior del automóvil con el tornillo M3 * 10. (Tornillos en paquete de soporte de motor de metal. Agregue arandelas M3 entre los tornillos y el chasis si los tornillos se desprenden fácilmente.)
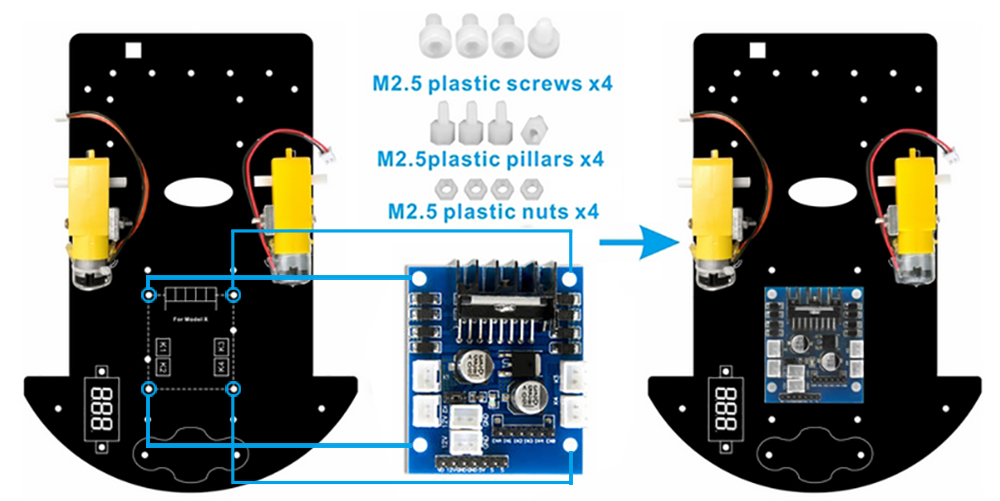
4) Instale el módulo de controlador de motor OSOYOO MODEL X en el chasis inferior del automóvil con tornillos de plástico 4pcs M2.5, pilares de plástico y tuercas de plástico. (Asegúrese de instalar el módulo del controlador del motor OSOYOO MODEL X en la dirección correcta).
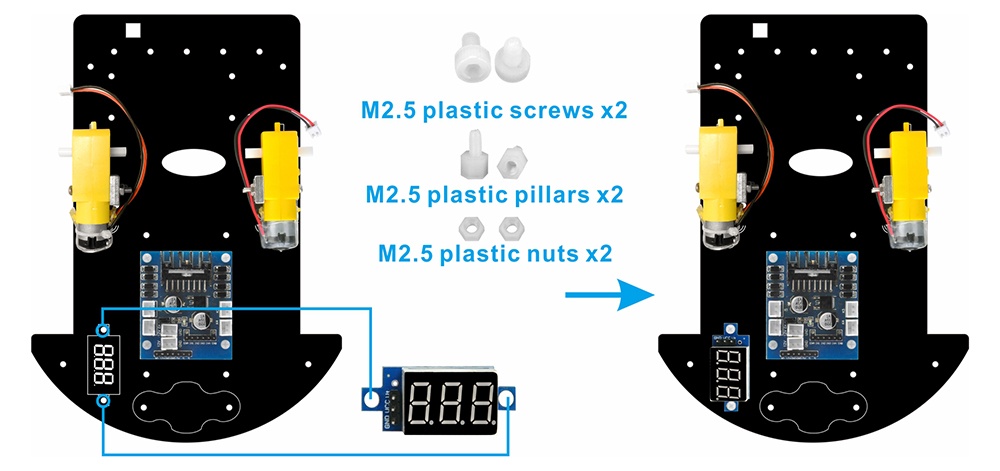
5) Instale el medidor de voltaje en el chasis inferior del automóvil con tornillos de plástico 2pcs M2.5, pilares de plástico y tuercas de plástico.
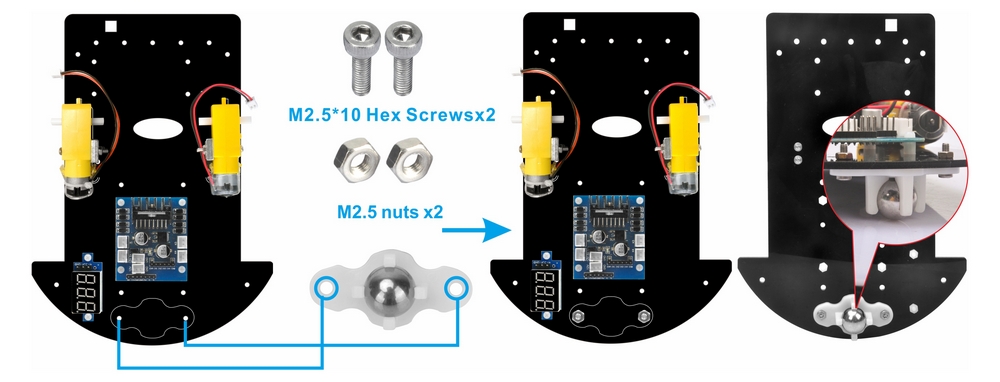
6) Instale la rueda universal debajo del chasis inferior del automóvil con tornillos hexagonales M3x10 2pcs y tuercas M3.
7) Instale 2 ruedas en los motores (si encuentra que las ruedas se instalan demasiado apretadas para moverse, puede quitar los tornillos de las ruedas)
8) Instale 4pcs pilares de cobre en chasis de coche bajo con tornillos hexagonales 4pcs M3x10. (Agregue lavados M3 entre tornillos y chasis si los tornillos se desprenden fácilmente).
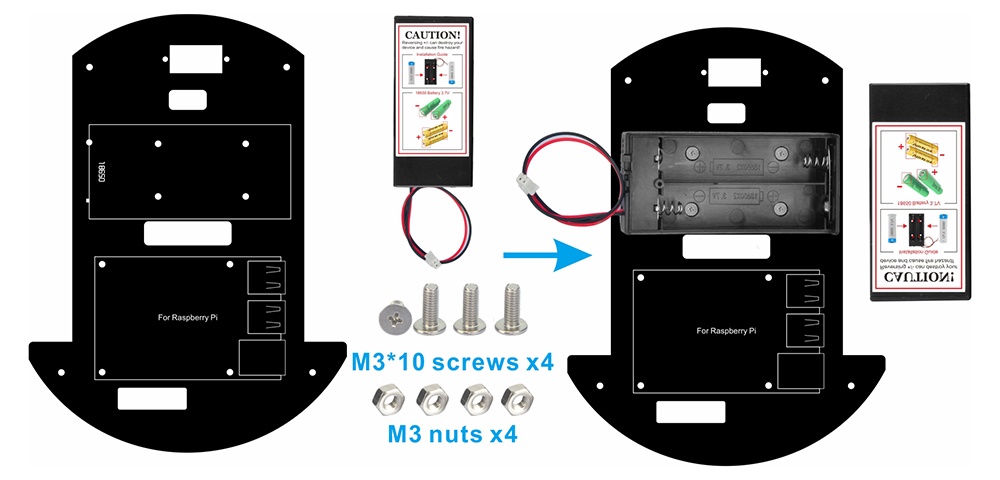
9) Instale la caja de la batería 18650 en el chasis superior del automóvil con tornillos 4pcs M3x10 y tuercas M3.
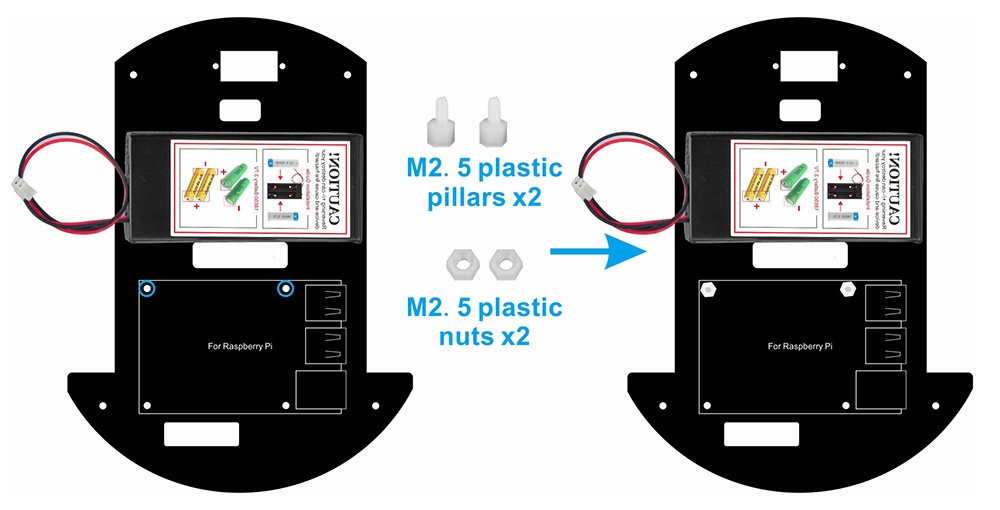
10) Arregle los pilares de plástico 2pcs M2.5 en el chasis superior de la siguiente manera:
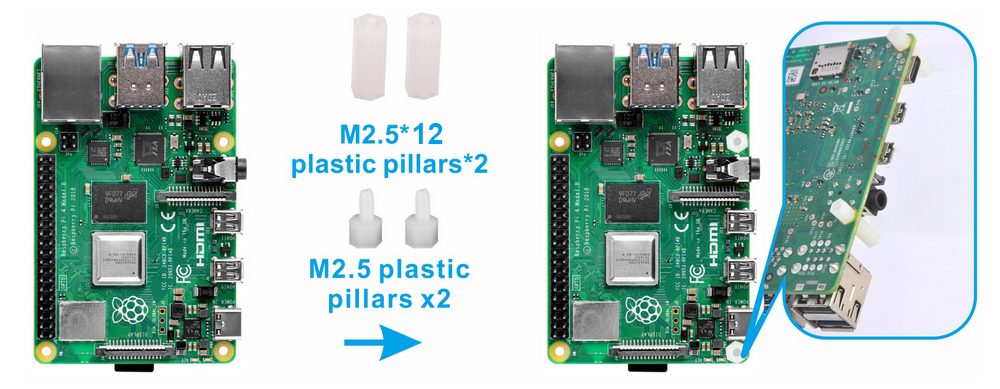
11) Use la cruz del pilar de plástico M2.5 Raspberry Pi y el pilar de plástico M2.5 * 12 de abajo hacia arriba de la siguiente manera
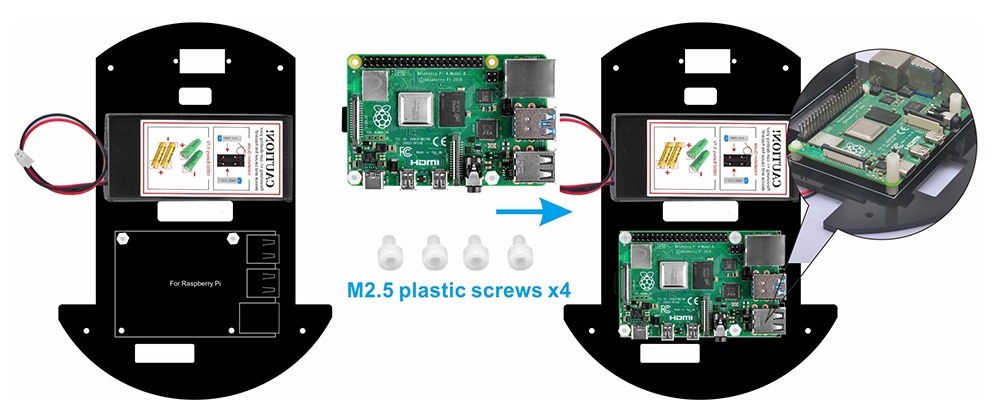
12) Instale tornillos de plástico 2pcs M2.5 debajo del chasis y tornillos de plástico 2pcs M2.5 en Raspberry Pi
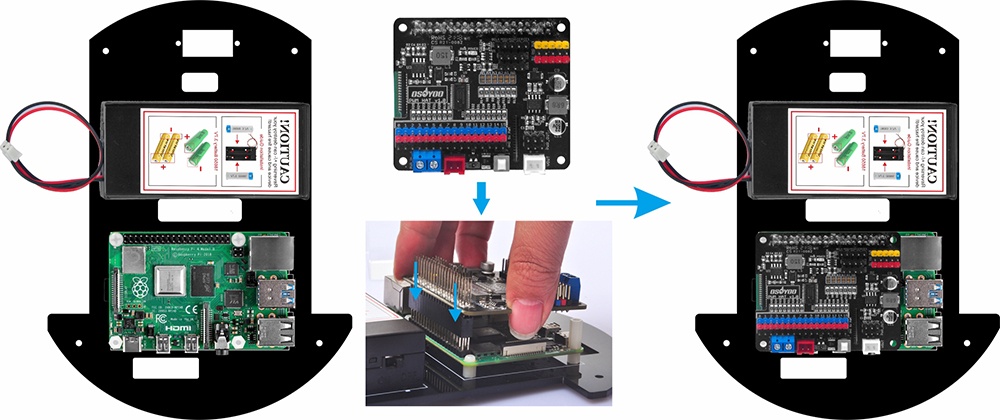
13) Inserte OSOYOO PWM Hat en Raspberry Pi de la siguiente manera:
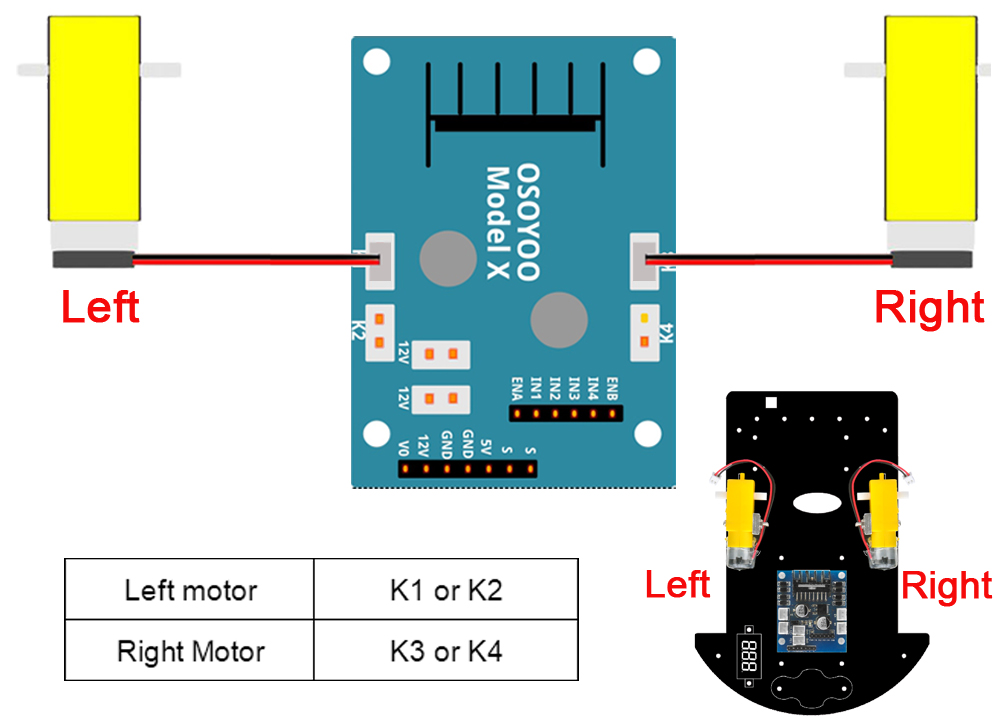
Paso 1: CONECTE el motor izquierdo al zócalo K1 o K2 del módulo del controlador del motor OSOYOO Model X, el motor derecho al zócalo K3 o K4 según el siguiente gráfico:
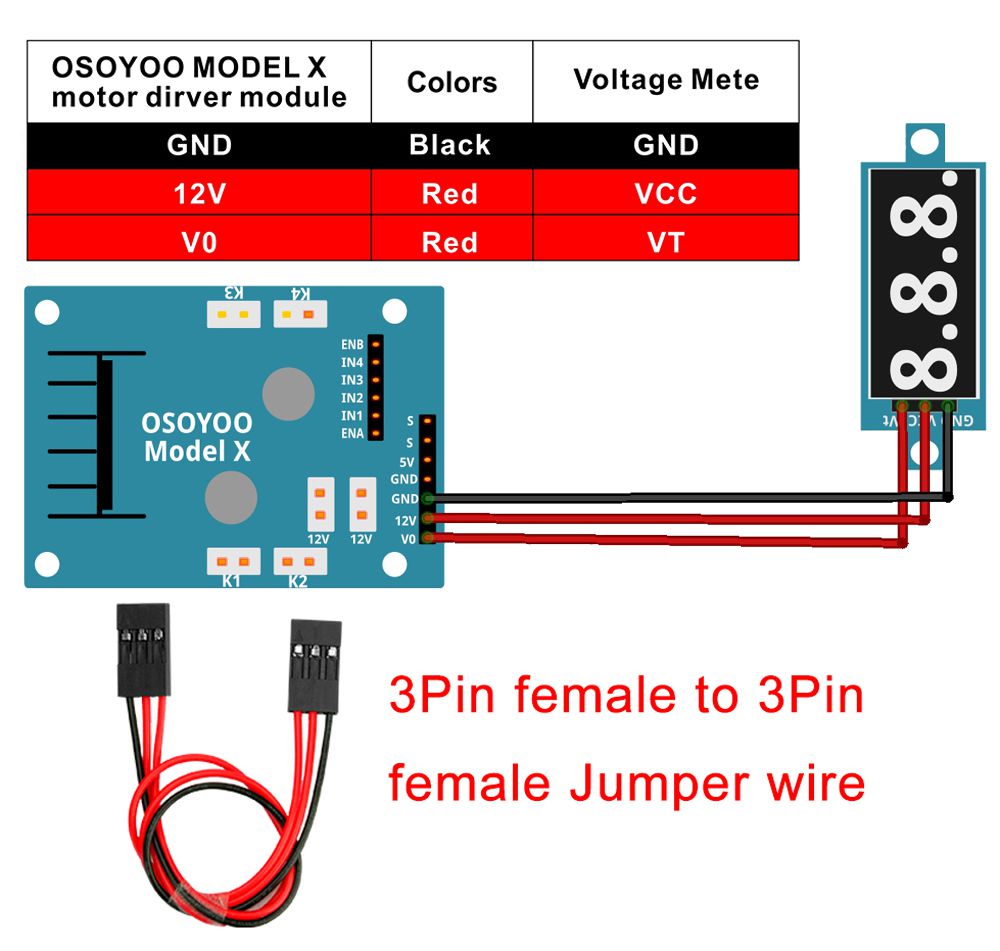
Paso 2: Conecte el medidor de voltaje al módulo del controlador del motor OSOYOO MODEL X con cables de puente hembra a hembra de 3 pines como se muestra a continuación diagrama de conexión:
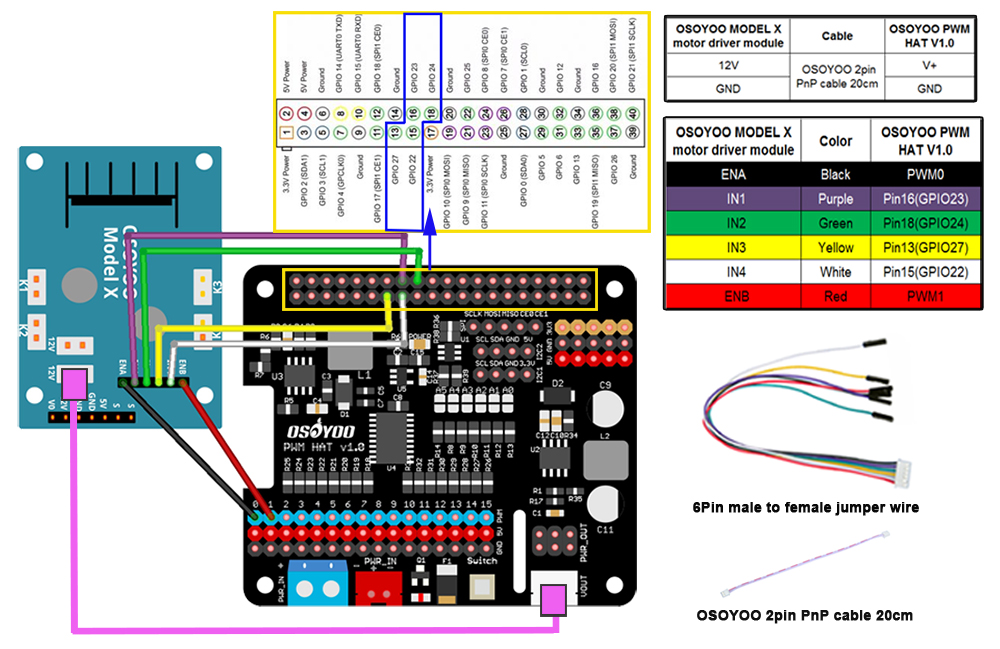
Paso 3: Conecte el módulo del controlador del motor OSOYOO MODEL X al OSOYOO PWM Hat V1.0 con un cable de puente hembra a hembra de 6Pin, también conecte el cable de 2 pines y 20 cm como se muestra en el siguiente gráfico:
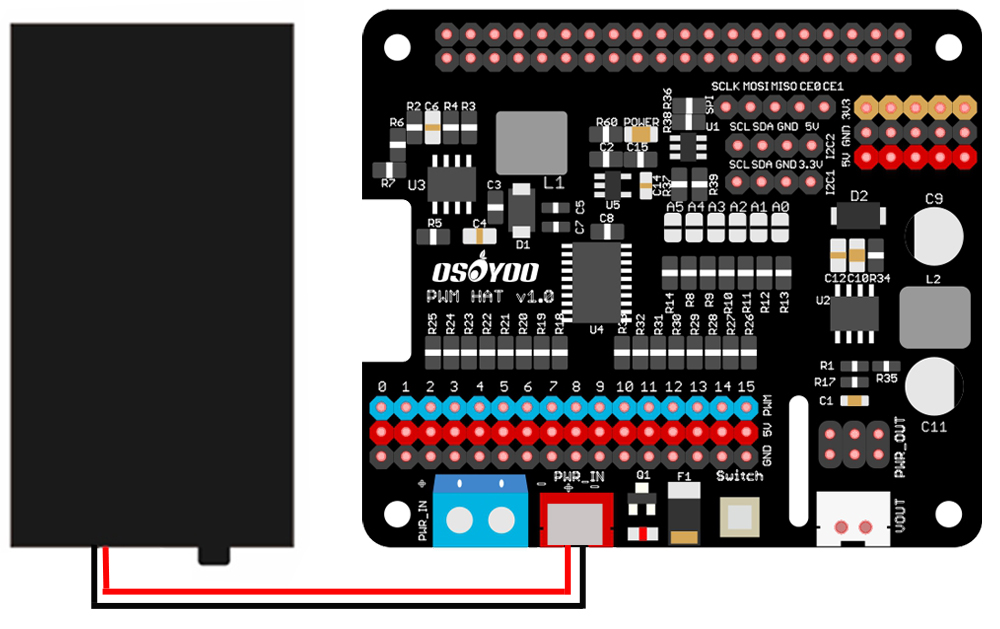
Paso 4: Conecte la caja de la batería 18650 a OSOYOO PWM Hat V1.0 como se muestra a continuación diagrama de conexión:
Paso 5: Conecte el chasis superior al chasis inferior con tornillos hexagonales 4pcs M3 * 10 y arandelas M3 4pcs
Paso 6: Instale sus baterías 18650 en la caja de baterías para 18650 según las siguientes instrucciones (Nota: Marque la instrucción de la casilla y asegúrese de que la dirección polar sea correcta, de lo contrario puede destruir su dispositivo y causar peligro de incendio).
Ahora la instalación de hardware está casi inactiva.
Sistema operativo: Este tutorial se ha probado en Raspberry Pi Bookworm y Trixie OS.
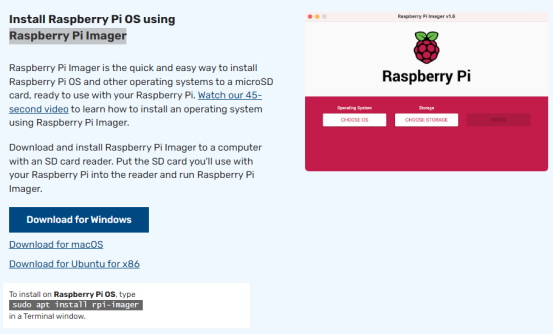
Estos son los pasos para instalar el sistema operativo Raspberry Pi:
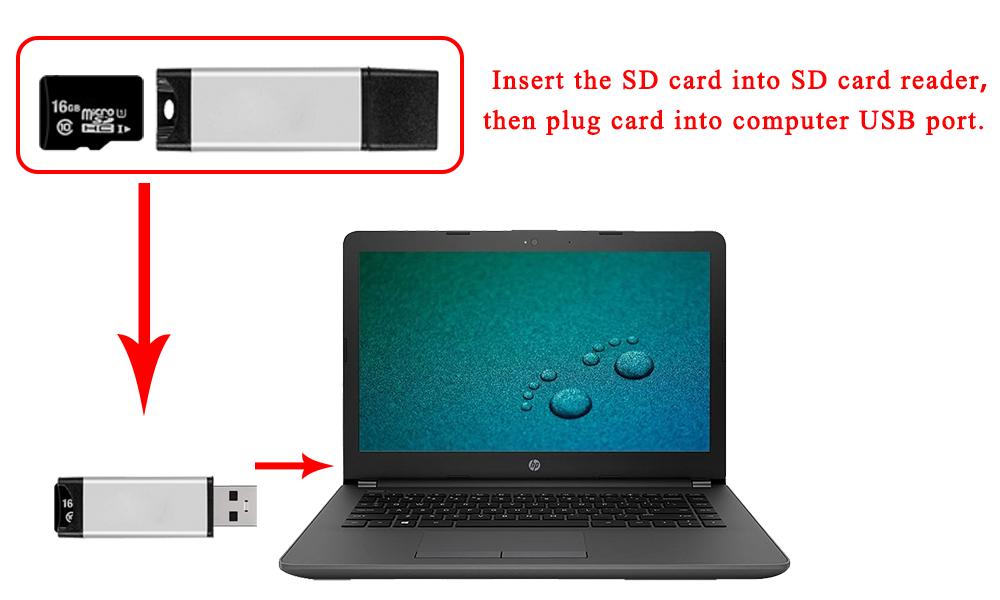
Paso 1: Grabe el sistema operativo Raspberry Pi en una tarjeta SD nueva o formateada (mínimo 16 GB) (omita este paso si su tarjeta SD tiene preinstalada la imagen del sistema operativo Raspberry Pi).
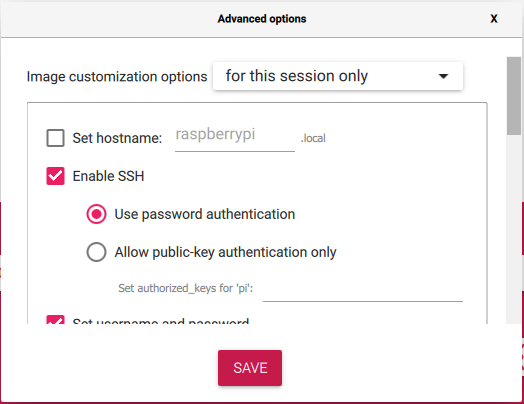
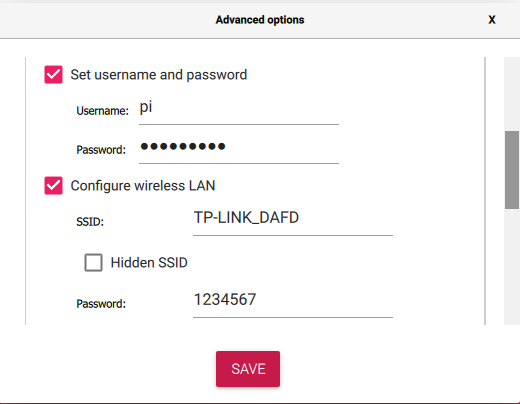
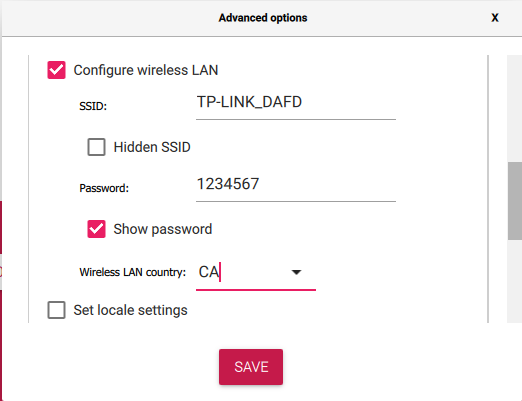
Nota: edita la configuración para habilitar SSH, establece el nombre de usuario y la contraseña, y conecta el wifi cuando escribas el sistema operativo Raspberry Pi
Paso 2: Conocer la dirección IP
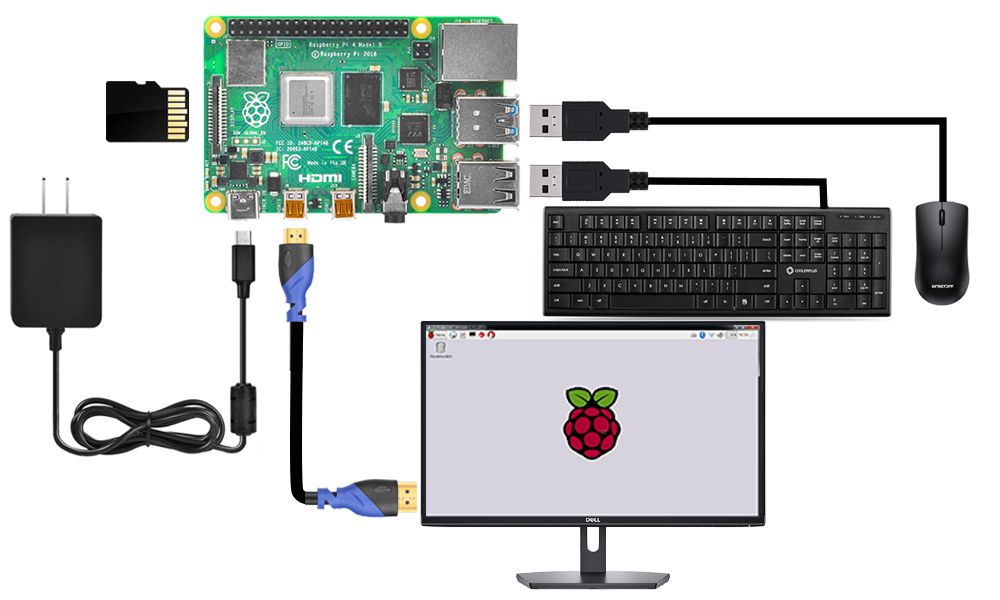
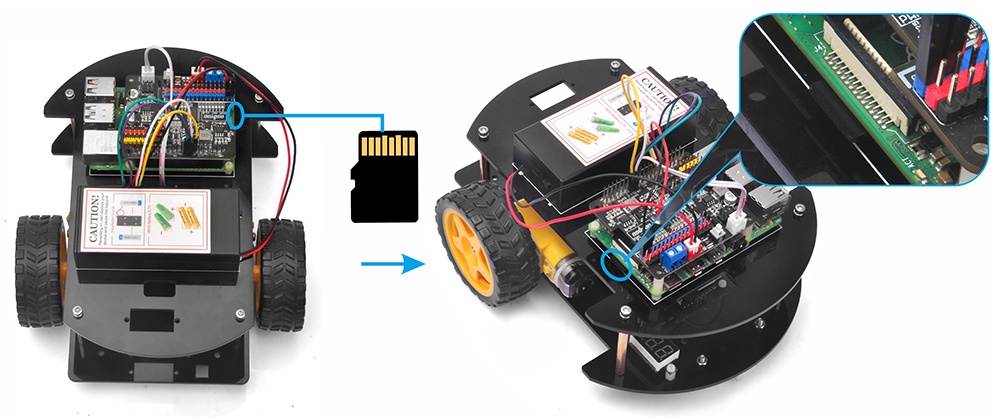
1. Conecte la Raspberry Pi a su monitor HDMI o televisor. Conecte un teclado y un ratón a los puertos USB de la Raspberry Pi. Inserte la tarjeta SD (del paso 1) en la ranura de su Raspberry Pi (si ha instalado su coche robot Raspberry Pi, sustituya la Raspberry Pi de la siguiente imagen por su coche robot).
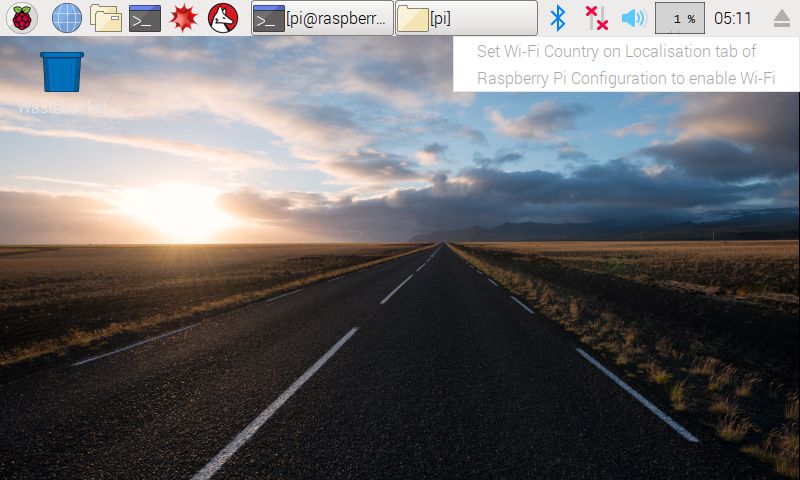
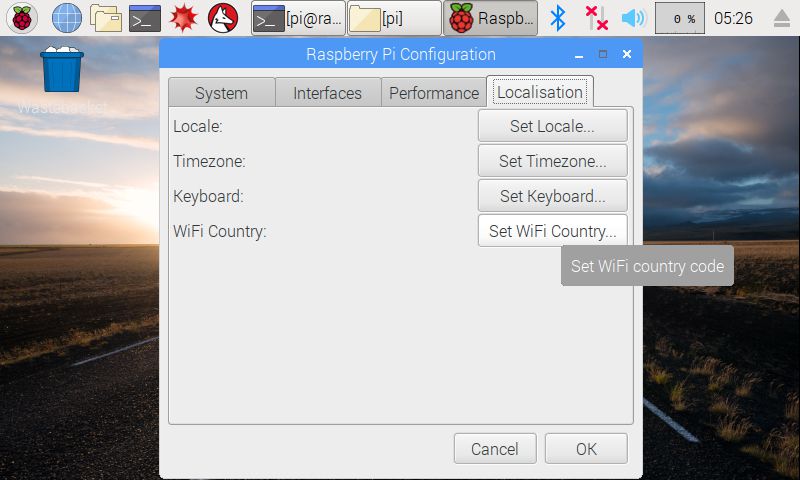
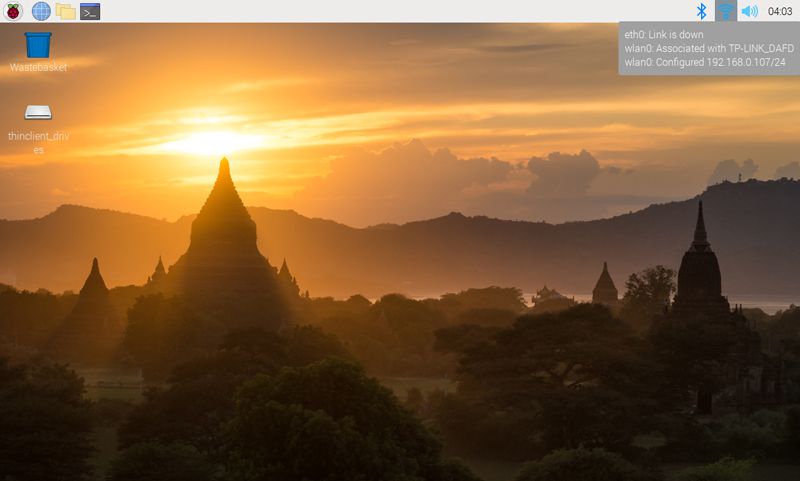
2. Si se desplaza sobre el icono Lan y aparece el siguiente aviso:
3. Haga clic en «Configurar la conexión WiFi» como se indica a continuación:
4. Averigüe la dirección IP del RPi.
Método A: Conecte su Pi al monitor y al ratón, haga clic en el icono LAN o WIFI para obtener la dirección IP como se muestra en la siguiente foto.
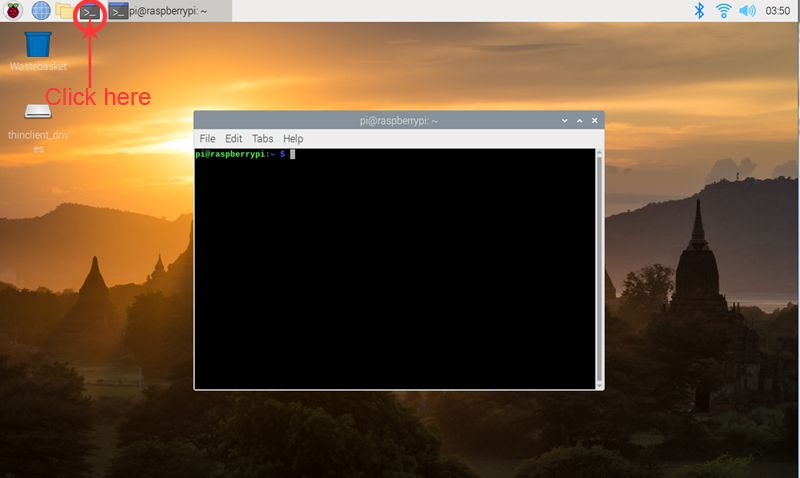
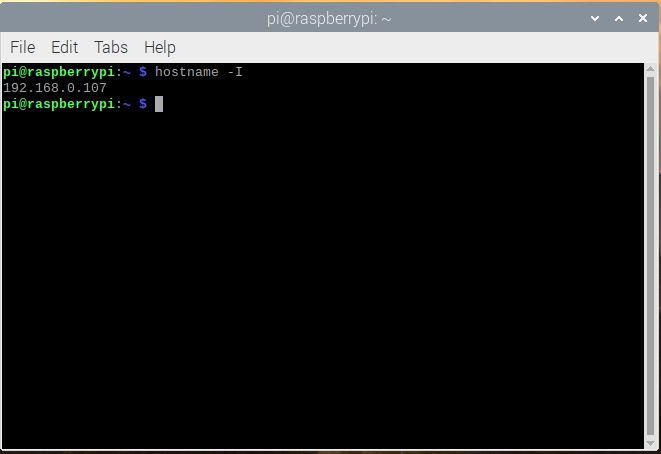
Método B: Haga clic en el icono de Terminal en la pantalla, escriba el siguiente comando en la ventana de terminal para obtener su dirección IP:
hostname -I
Paso 3: Utilice herramientas ssh para controlar Raspberry Pi de forma remota.
Nota:
1) Para obtener más información sobre cómo utilizar la herramienta ssh para controlar Raspberry Pi de forma remota, visite el enlace: https://osoyoo.com/2017/06/20/raspberry-pi-3-basic-tutorial/#7 2) En nuestras lecciones de ejemplo, utilizamos un PC con Windows como dispositivo de consola remota y PuTTY como herramienta ssh.
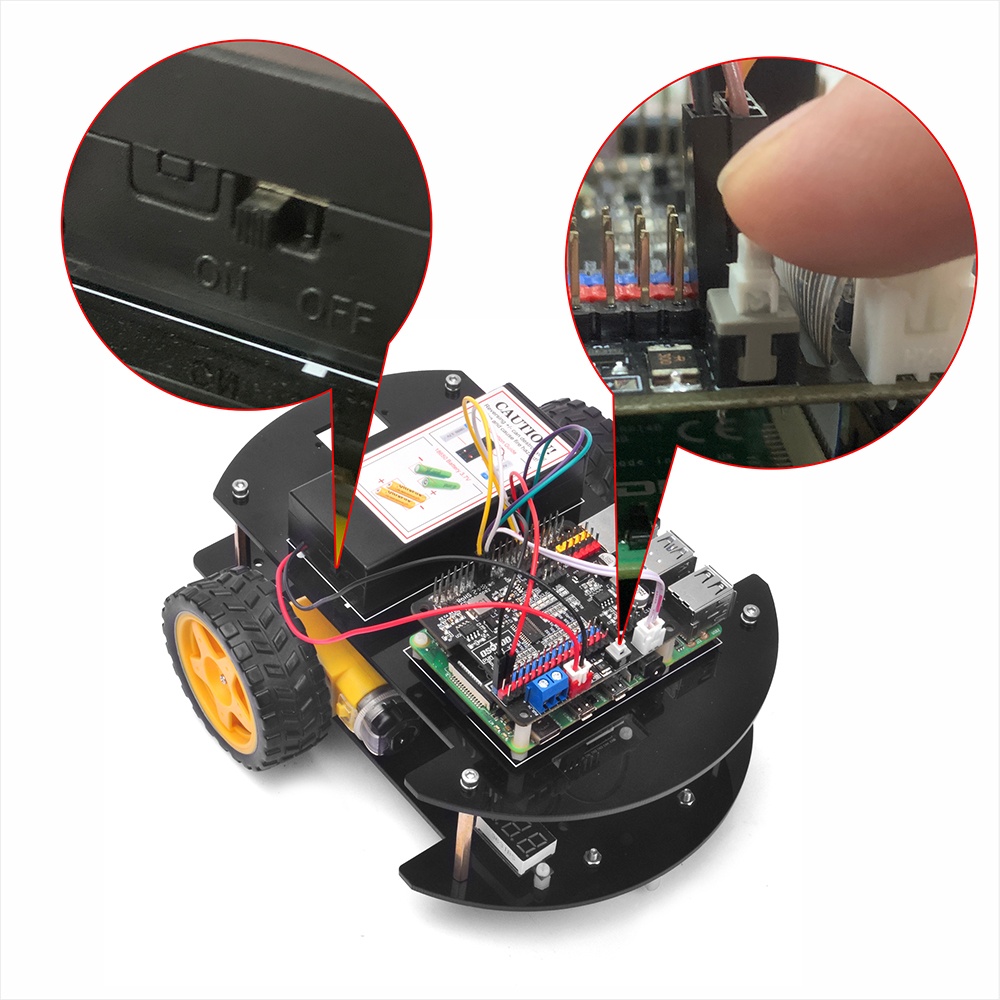
1. Instale la Raspberry Pi con la tarjeta SD (del paso 2) en el coche robot (atención: primero debe apagar la Raspberry Pi) y, a continuación, encienda el coche robot.
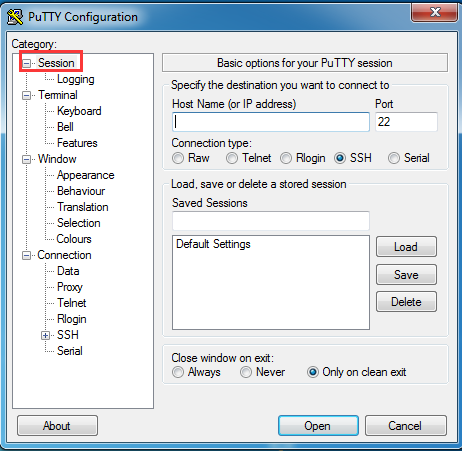
3. Abra PuTTY y haga clic en «Session» (Sesión) en la estructura en forma de árbol situada a la izquierda (normalmente está contraída al iniciar PuTTY):
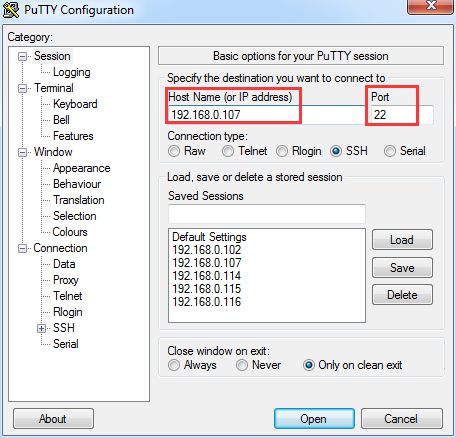
4. Introduzca la dirección IP que ha obtenido en el cuadro de texto debajo de Nombre de host (o dirección IP) y 22 debajo de Puerto (por defecto es 22) y, a continuación, haga clic en Abrir.
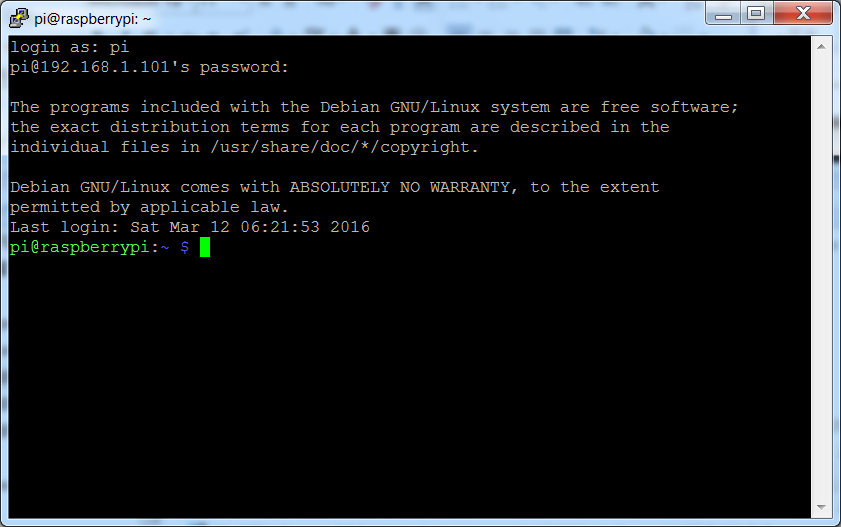
5. Ten en cuenta que cuando inicies sesión por primera vez en la Raspberry Pi con la dirección IP, aparecerá un aviso de seguridad. Simplemente haz clic en Sí. Cuando aparezca la ventana de PuTTY, inicia sesión como: escribe el nombre de usuario: pi, y la contraseña: raspberry (la predeterminada, si no la has cambiado).
Nota: cuando escriba la contraseña, la ventana no mostrará nada, solo un espacio en blanco, pero en realidad sí está escribiendo. Así que concéntrese en escribirla correctamente y pulse Intro. Después de iniciar sesión correctamente en la RPi, la ventana mostrará lo siguiente:
Si utiliza un ordenador MacBook o Linux (es decir, otra Raspberry Pi), puede abrir directamente un terminal shell en lugar de Putty y escribir el siguiente comando:
ssh pi@your_robot_car_ip
your_robot_car_ip significa la IP de su coche robot Raspberry Pi, que puede leer con el comando hostname -I.
Por ejemplo, si la IP de tu coche robot es 192.168.0.111, el comando correcto para acceder a tu coche es: ssh pi@192.168.0.111
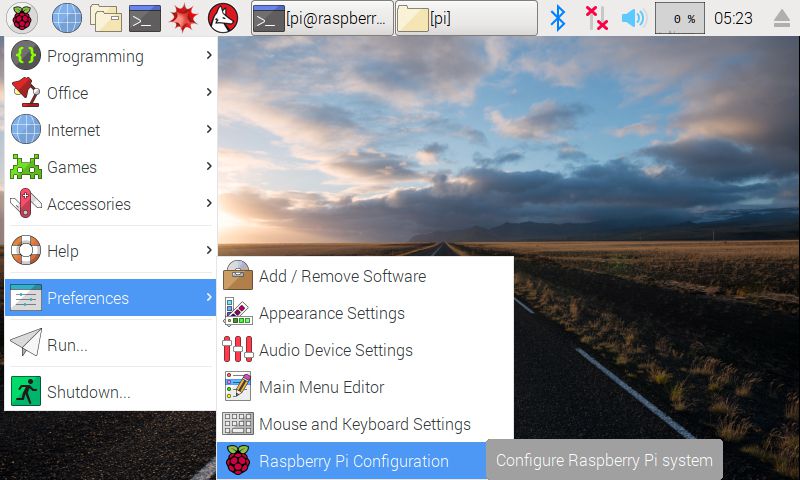
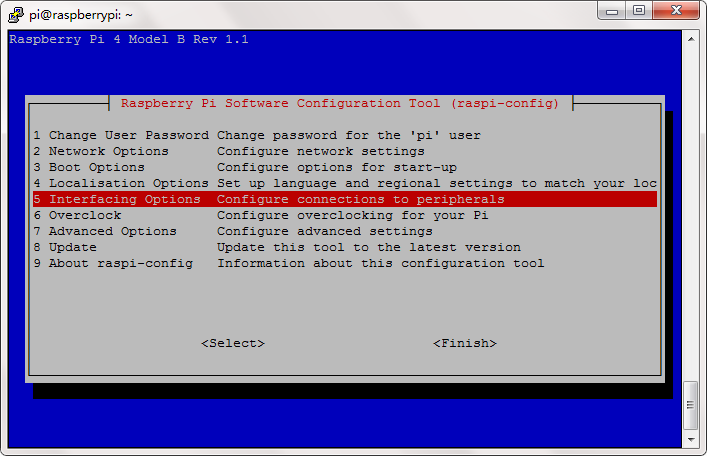
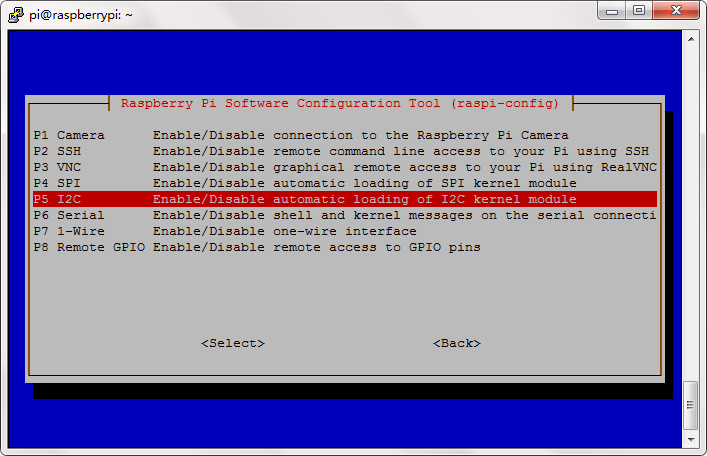
Paso 4: Habilita I2C
Si no has habilitado I2C, ejecuta el siguiente comando para habilitarlo.
sudo raspi-config
A continuación, seleccione Interfacing Options->I2C->Yes->Ok->Finish
Paso 5: actualiza tu sistema:
sudo apt-get update
sudo apt-get upgrade
Paso 6: Instale pca9685 y la biblioteca servokit ejecutando los siguientes comandos
Paso 8: Coloca el coche robot en el suelo y ejecuta el programa básico de movimiento en Python escribiendo el siguiente comando en la terminal:
python picar-basic4.py
Una vez ejecutado el código Python anterior, su coche robot se moverá hacia delante durante 1 segundo y luego hacia atrás durante 1 segundo, girará a la izquierda durante 1 segundo y a la derecha durante 1 segundo, y luego se detendrá. (Si el coche robot no se mueve como se ha descrito anteriormente, compruebe primero las conexiones).
Hemos incluido comentarios completos en el código Python de ejemplo http://osoyoo.com/driver/picar/picar-basic4.py. Si tienes conocimientos básicos de Python, podrás comprender fácilmente cómo personalizar el código para tu propia aplicación.

































 Paso 2: Conecte el medidor de voltaje al módulo del controlador del motor OSOYOO MODEL X con cables de puente hembra a hembra de 3 pines como se muestra a continuación diagrama de conexión:
Paso 2: Conecte el medidor de voltaje al módulo del controlador del motor OSOYOO MODEL X con cables de puente hembra a hembra de 3 pines como se muestra a continuación diagrama de conexión: