Dans cette leçon, nous réaliserons un projet de conduite automatique avec évitement d’obstacles. Nous utiliserons un module ultrasonique pour “voir” l’obstacle, et la voiture tournera automatiquement autour de l’obstacle.
Vous devez avoir terminé la leçon 1 avant de continuer avec cette leçon.
Vidéo d’installation de la voiture robot OSOYOO: https://osoyoo.com/manual/2021006600.html
Châssis de voiture robotique avec roues Mecanum OSOYOO x1
Roues et moteurs OSOYOO x4 (roues gauches x2 / roues droites x2)
Carte OSOYOO Mega2560, entièrement compatible avec Arduino UNO/Mega2560 x1
Module Wi-Fi UART OSOYOO x1
Carte de pilote modèle Y OSOYOO x1
Voltmètre OSOYOO x1
Moteur servo MG90 OSOYOO x1
Module capteur ultrasonique OSOYOO x1
Support de montage OSOYOO x1
Boîte à piles OSOYOO x1
Câble jumper femelle-femelle à 3 broches OSOYOO x1
Câble jumper mâle-femelle à 6 broches OSOYOO x2
Câble jumper mâle-femelle à 10 broches OSOYOO x1
Câble XH.25 femelle-femelle à 2 broches OSOYOO x1
Batteries 18650 (3,7V) x2
Chargeur de batteries x1
(1)Installez le module ultrasonique sur le support de montage avec 4 vis M1.5*8 et des écrous M1.5.
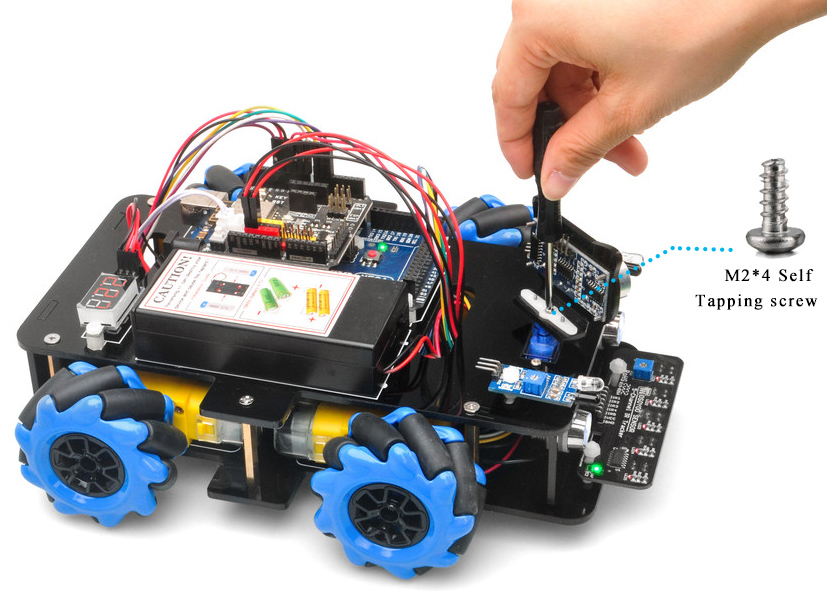
(2)Installez le support de montage pour le module ultrasonique sur le moteur servo avec une vis autotaraudeuse M2*4.
Lors de la mise en place de l’ultrason en dessous, comme les vis autotaraudeuses se détériorent facilement :
A. Supportez le moteur par en dessous, car les vis autotaraudeuses se détériorent facilement.
B. N’insérez pas la vis avant le processus d’alignement
.
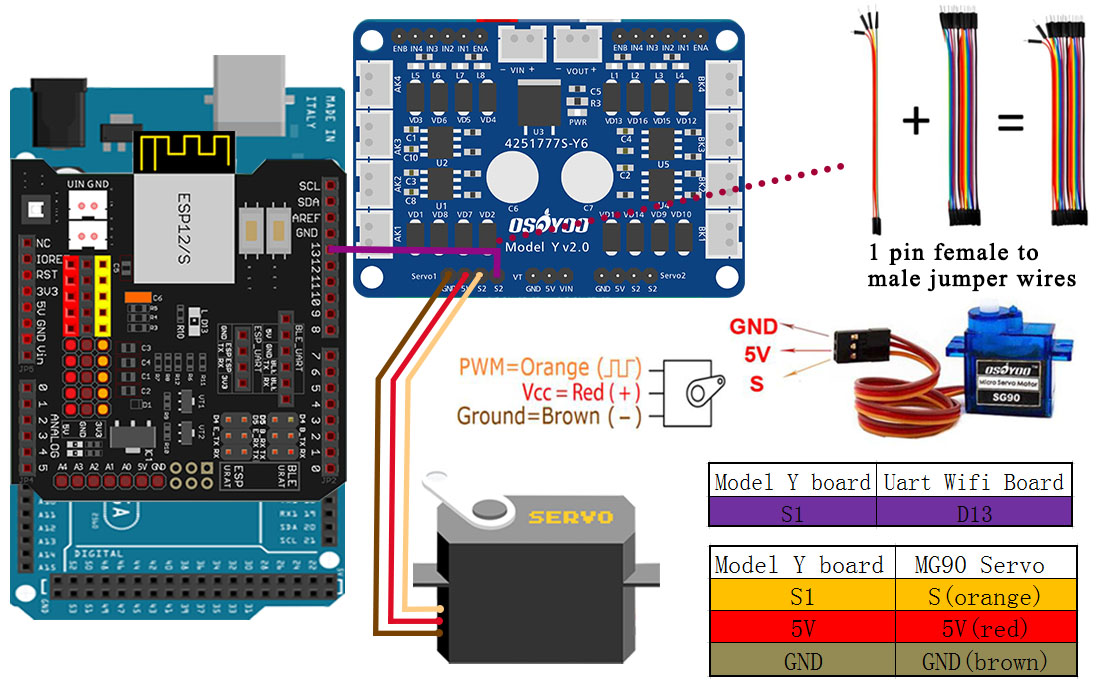
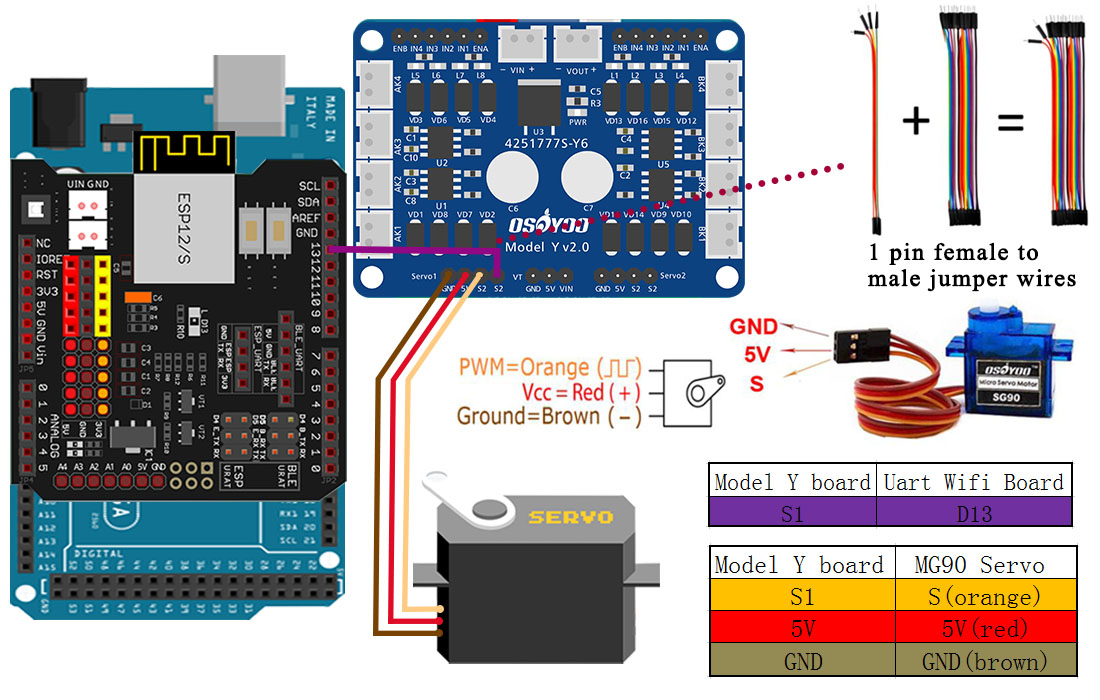
(3)Veuillez conserver toutes les connexions de la leçon 1 telles qu’elles sont. Avant de connecter les fils, assurez-vous d’avoir connecté le servo SG90 à la carte modèle Y et au module Wi-Fi UART OSOYOO comme suit.
Remarque : Vous devez séparer 1 câble jumper mâle-femelle de notre ensemble de 10 câbles jumper. Toute couleur de l’ensemble conviendra. Les autres fils servent de pièces de rechange en cas de rupture ou de dommage.
.
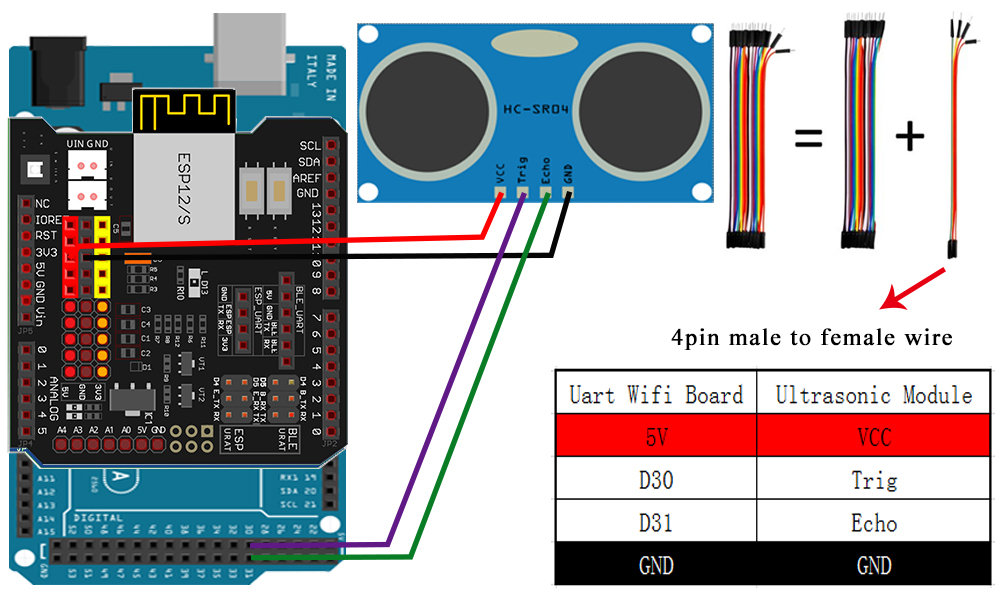
4)Connectez le module ultrasonique au module Wi-Fi UART OSOYOO comme suit.
Étape 1 : Installez la dernière version de l’IDE Arduino (si vous disposez d’une version de l’IDE Arduino après la version 1.1.16, veuillez sauter cette étape). Téléchargez l’IDE Arduino depuis https://www.arduino.cc/en/Main/Software?setlang=en, puis installez le logiciel.
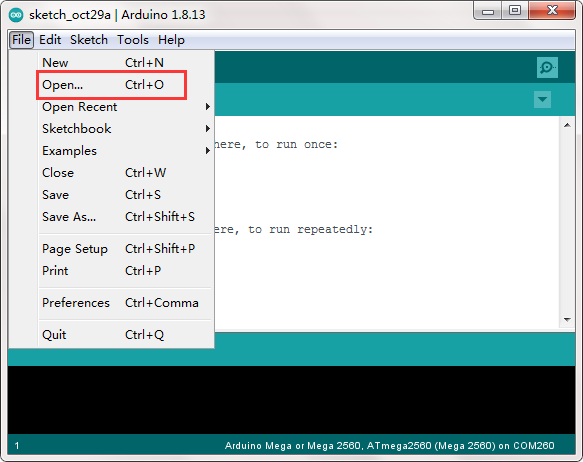
Étape 3 : Connectez la carte Mega2560 à votre PC à l’aide d’un câble USB, ouvrez l’IDE Arduino → cliquez sur Fichier → cliquez sur Ouvrir → choisissez le code “lesson2.ino” dans le dossier lesson1, chargez le code dans Arduino.
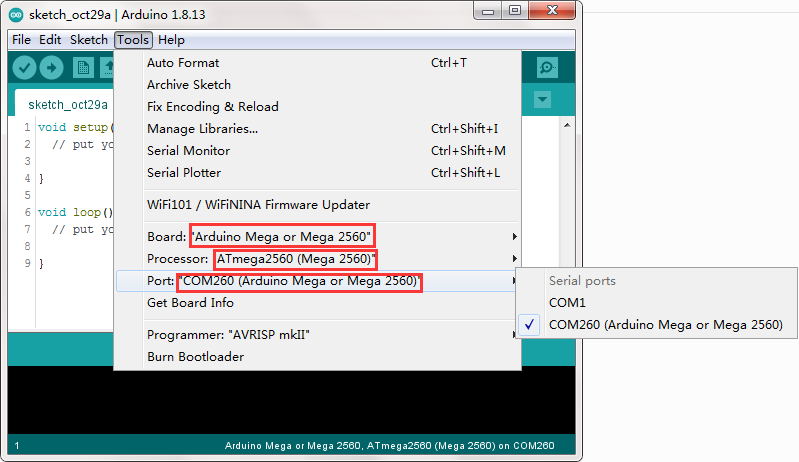
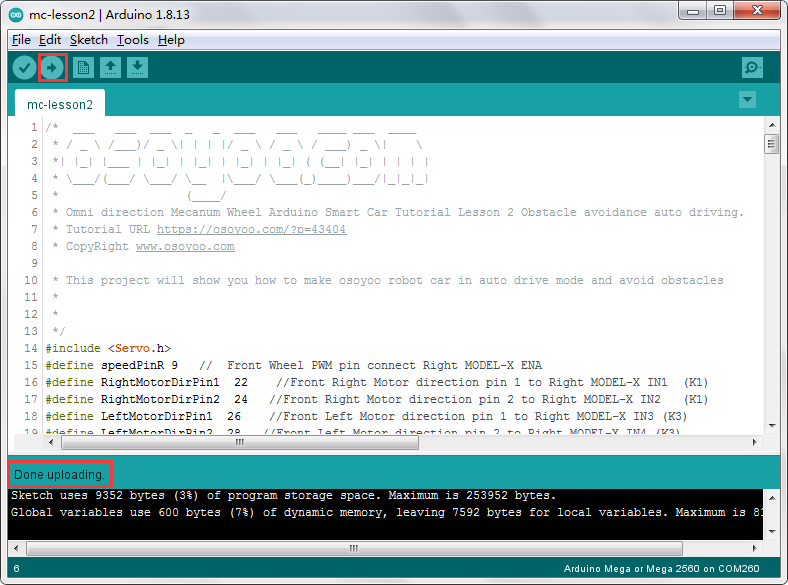
Étape 4 : Choisissez la carte MEGA2560 comme type de carte et le port correct pour votre projet, comme indiqué sur l’image ci-dessous, puis téléversez le programme sur la carte.
Alignement initial de la direction du capteur ultrasonique servo
Après avoir allumé la batterie, le servo effectuera quelques mouvements et s’arrêtera finalement en position frontale pendant 3 secondes.
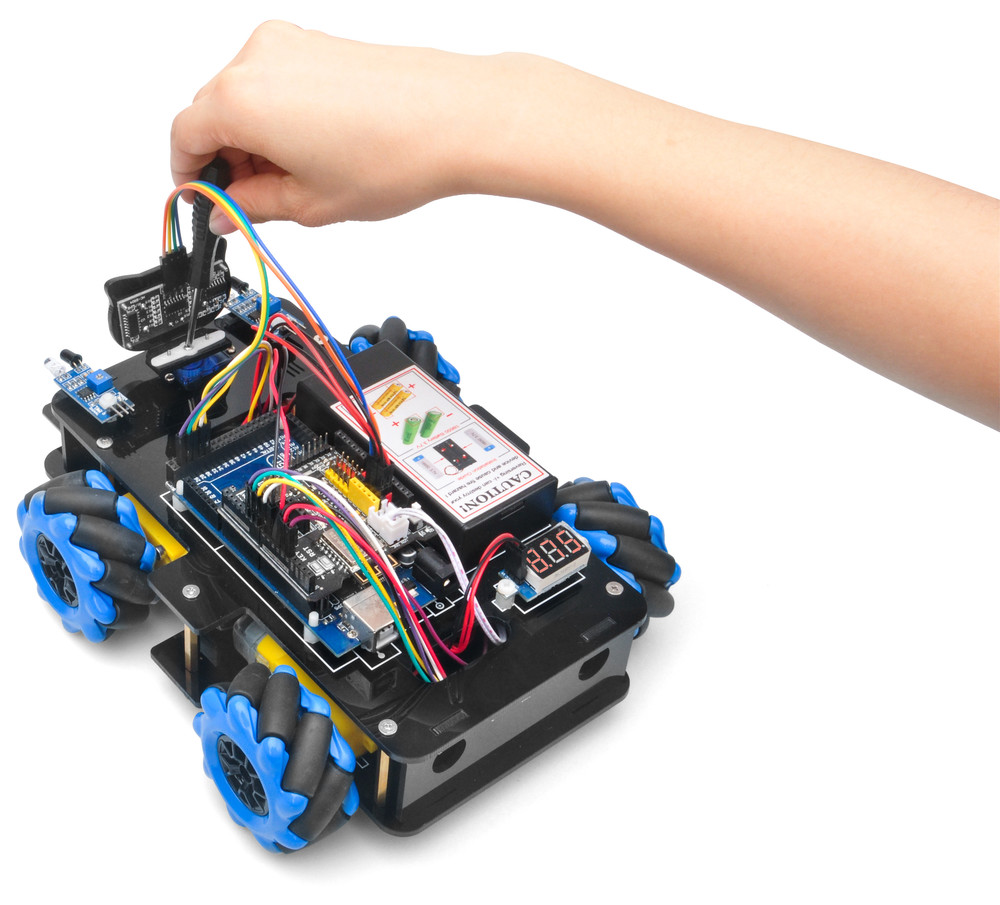
Si le capteur ultrasonique ne fait pas face à l’avant pendant ces premières 3 secondes, vous devez immédiatement éteindre la batterie et retirer le capteur du servo, le réinstaller et le faire faire face à la direction avant droite comme indiqué sur l’image ci-dessous. Sinon, le programme d’évitement d’obstacles ne fonctionnera pas correctement.
Après avoir ajusté la direction du capteur, allumez à nouveau la batterie, le capteur devrait être orienté vers l’avant comme indiqué sur l’image ci-dessous. Si sa direction n’est pas droite vers l’avant, éteignez la batterie et réalisez à nouveau l’alignement de la direction.
Test final :
Après avoir allumé l’interrupteur de la batterie sur la boîte de batterie, si le module ultrasonique se tourne vers la position de la vue avant, cela signifie que vous n’avez plus besoin d’ajuster la position du capteur. Attendez simplement 3 secondes. Si aucun obstacle n’est détecté, la voiture avancera. Si des obstacles sont détectés, la voiture s’arrêtera, le module ultrasonique se tournera de droite à gauche pour détecter les obstacles environnants. La voiture robot décidera de tourner à gauche, à droite ou de reculer en fonction des données du capteur d’obstacles et de notre algorithme d’évitement d’obstacles.
Parfois, votre voiture peut entrer en collision et modifier la position de votre capteur ultrasonique. Vous devez alors penser à réaligner la direction du capteur en suivant le lien “Alignement initial de la direction du capteur ultrasonique servo.
Dépannage
Parfois, lorsque vous exécutez le code du projet 2, vous pouvez constater que la voiture recule même s’il n’y a pas d’obstacle devant. Cela signifie généralement qu’il y a un problème d’installation du capteur ultrasonique ou de connexion des fils.
Pour résoudre le problème, veuillez vérifier l’étape 4 de l’installation matérielle.
Utilisez 4 nouveaux fils jumper pour connecter le capteur à la carte Wi-Fi Arduino,
Assurez-vous que:
La broche VCC du capteur ultrasonique est connectée au 5V de la carte Wi-Fi.
La broche TRIG du capteur ultrasonique est connectée au D30 de la carte Wi-Fi.
La broche ECHO du capteur ultrasonique est connectée au D31 de la carte Wi-Fi.
La broche GND du capteur ultrasonique est connectée à la GND de la carte Wi-Fi
Une fois que les fils du capteur sont correctement connectés selon les instructions ci-dessus, vous pouvez effectuer un test du capteur.
Veuillez télécharger le code de test du capteur de distance à partir de https://osoyoo.com/download/code/distance.zip, maintenez votre Arduino et votre PC connectés avec le câble bleu, puis exécutez le code distance.ino.
Maintenant, ouvrez le moniteur série de votre IDE Arduino, placez votre main devant le capteur,
Vous devriez voir une valeur de distance dans le moniteur série. Cette valeur est la distance entre votre main et le capteur.
Si vous ne voyez qu’une valeur de 0 dans le moniteur série, cela signifie que la connexion des fils du capteur est incorrecte, que les fils sont peut-être cassés ou que le capteur est défectueux. Vous devrez peut-être changer les 4 fils par de nouveaux ou contacter le support OSOYOO pour obtenir un remplacement du capteur.













Thank You!