Dans cette leçon, nous utiliserons une application mobile pour contrôler notre voiture robot et effectuer une conduite d’imitation. Comme il s’agit d’une conduite simulée, nous utiliserons dans notre application un volant virtuel et un levier de vitesse pour imiter leurs homologues dans une voiture réelle.
Châssis de voiture robotique à roues mécaniques OSOYOO x1
Roues et moteurs OSOYOO x4 (roues gauches x2 / roues droites x2)
Carte OSOYOO Mega2560, entièrement compatible avec Arduino UNO/Mega2560 x1
Module Wi-Fi Uart OSOYOO x1
Carte de commande modèle Y OSOYOO x1
Voltmètre OSOYOO x1
Modules Bluetooth OSOYOO x1
Boîtier de batterie OSOYOO x1
Câble de liaison femelle à femelle 3 broches OSOYOO x1
Câble de liaison mâle à femelle 6 broches OSOYOO x2
Câble de liaison mâle à femelle 10 broches OSOYOO x1
Connecteur femelle à femelle XH.25 à 2 broches OSOYOO x1
Batteries 18650 (3,7V) x2
Chargeur de batterie OSOYOO x1
Étape 1 : Vous devez terminer la leçon 1 ( assemblage de la voiture) avant de passer à cette leçon.
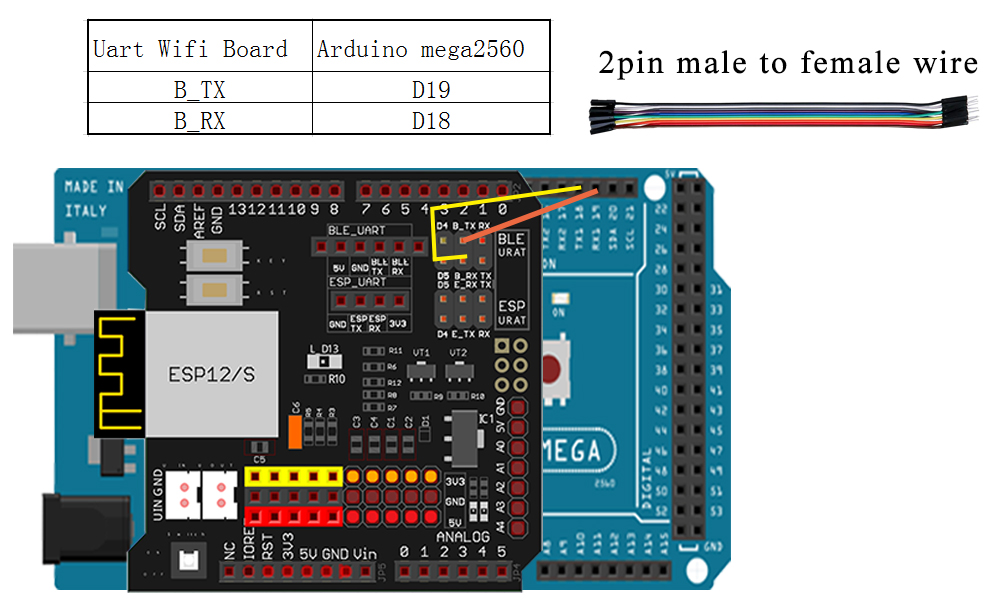
Étape 2 : Connectez les ports Bluetooth TX/RX aux broches D19, D18 à l’aide de fils de liaison.
(Note : Vous devez séparer 2 fils de liaison mâle-femelle de notre ensemble de 10 fils de liaison. N’importe quelle couleur de l’ensemble conviendra. Les 8 autres fils sont des pièces de rechange en cas de casse ou d’endommagement éventuel.)
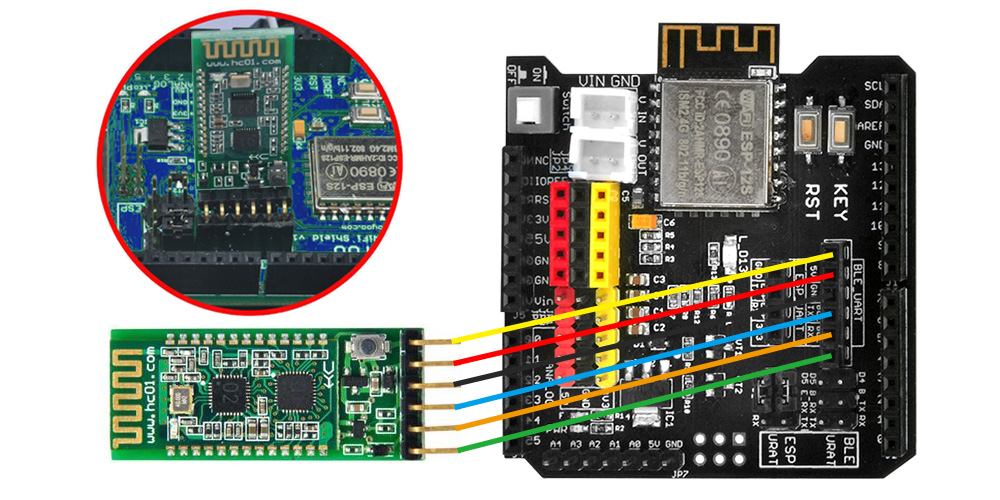
Étape 3 : Le module Bluetooth doit être inséré dans l’emplacement Bluetooth 6 broches de la carte Wi-Fi OSOYOO.
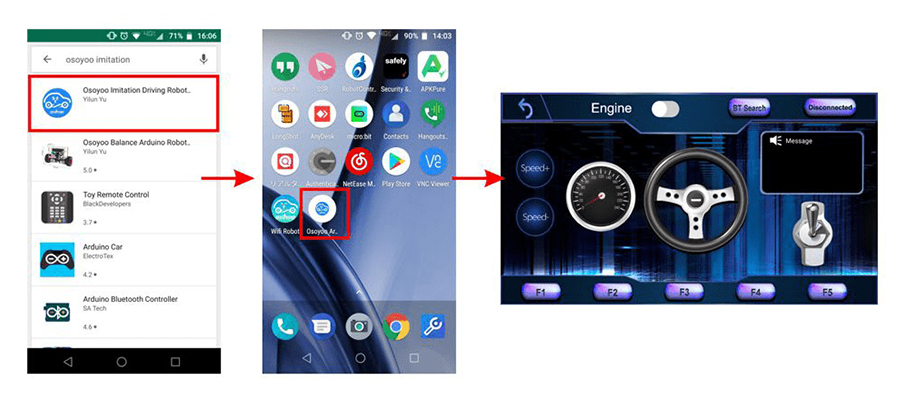
Étape 4 : Application mobile:
Rendez-vous sur Google Play ou l’App Store d’Apple et recherchez l’application “OSOYOO imitation driving”. Téléchargez l’application et installez-la sur votre smartphone.
Connectez le module HC-02 Bluetooth sur un téléphone Android. Il y a un bouton “BT Search” dans l’application Android : lorsque vous cliquez sur ce bouton, vous verrez une liste d’appareils Bluetooth qui ont été associés à votre application. Sélectionnez le périphérique HC-02 pour connecter la voiture. Une fois le HC-02 connecté, l’état du Bluetooth passera de “Déconnecté” à “Connecté”. Vous ne pouvez contrôler votre voiture que lorsque le Bluetooth est connecté.
Connectez le module HC-02 Bluetooth sur un iPhone/iPad, cliquez simplement sur le bouton “Connect”, un périphérique HC-02 apparaîtra dans une liste contextuelle. Cliquez sur ce périphérique HC-02 pour connecter le module Bluetooth à votre iPhone. Ensuite, le bouton “Connect” changera de nom en “Disconnect”.
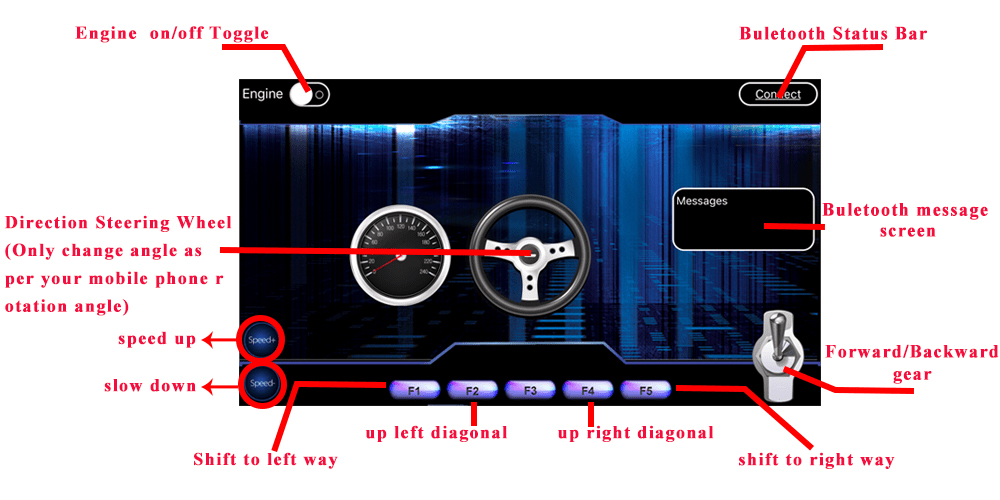
Bascule moteur : lorsque la bascule moteur est réglée sur OFF (blanc), la voiture s’arrêtera et tous les boutons de l’application seront désactivés. Lorsque la bascule moteur est réglée sur ON (rouge), la voiture commencera à avancer. Tous les autres boutons de contrôle des mouvements seront activés.
Interrupteur de marche avant/arrière: cet interrupteur permet de contrôler si la voiture avance ou recule, comme un véritable levier de vitesse de voiture.
Boutons personnalisés F1, F2, F3, F4, F5:Dans cette leçon, nous n’utiliserons que la touche F3 qui met en pause le mouvement de la voiture. La différence entre la touche F3 et le bouton Engine OFF est que lorsque le bouton Engine OFF est touché, tous les autres boutons seront désactivés. Vous devez à nouveau basculer le bouton Engine pour activer les autres boutons. En revanche, lorsque F3 est cliqué, la voiture s’arrête, mais tous les autres boutons restent actifs. Appuyez sur F1 pour tourner à gauche, F2 pour une diagonale vers le haut à gauche, F3 pour mettre en pause, F4 pour une diagonale vers le haut à droite, F5 pour tourner à droite.
Volant de direction : lorsque vous tournez l’angle de votre téléphone portable, le volant de direction changera d’angle selon l’angle de rotation de votre téléphone portable. Cela permettra à votre voiture de changer de direction. Par exemple, lorsque le volant de direction effectue une rotation dans le sens des aiguilles d’une montre, la voiture se déplacera vers la gauche. Rappelez-vous que le volant de direction et le levier de marche avant/arrière doivent fonctionner ensemble, comme si vous conduisiez une vraie voiture. Par exemple, lorsque vous voulez reculer votre voiture pour vous garer à droite, vous devez positionner le levier sur la position R (recul) et tourner le volant dans le sens inverse des aiguilles d’une montre.
Étape 1 : Installez la dernière version de l’IDE Arduino (Si vous avez une version d’IDE Arduino supérieure à 1.1.16, veuillez passer cette étape). Téléchargez l’IDE Arduino depuis https://www.arduino.cc/en/Main/Software?setlang=en,puis installez le logiciel.
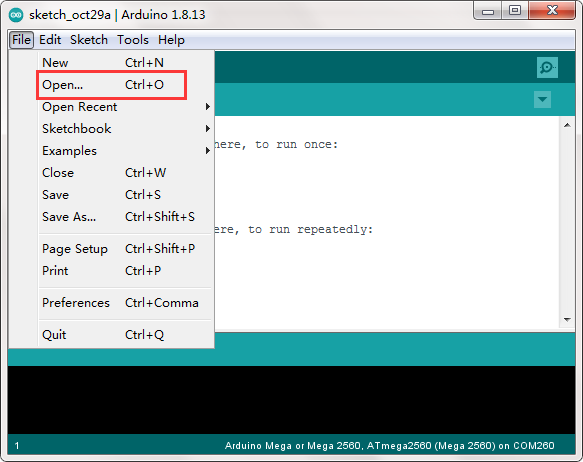
Étape 3 : Connectez la carte Mega2560 à votre ordinateur à l’aide d’un câble USB. Ouvrez l’IDE Arduino → cliquez sur “File” → cliquez sur “Open” → choisissez le code “lesson5.ino” dans le dossier lesson5, chargez le code dans Arduino.
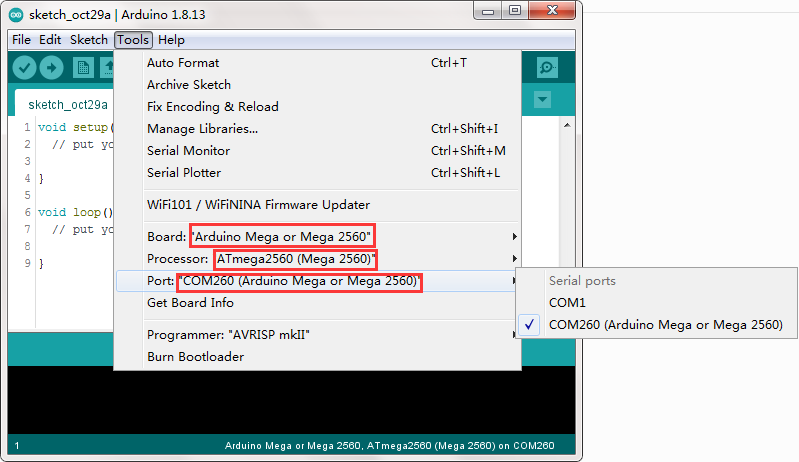
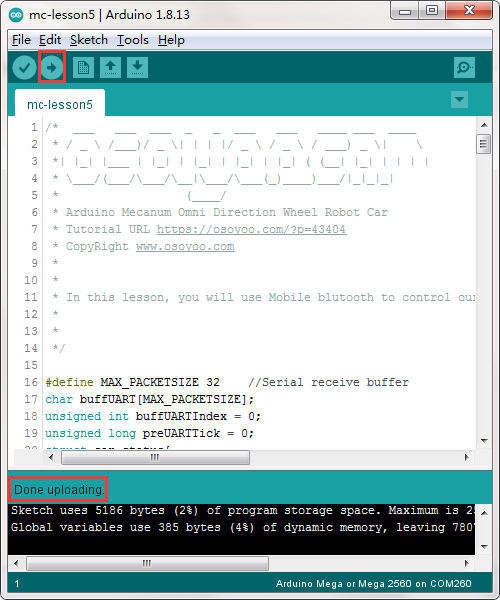
Étape 4 : Choisissez la carte/port correspondant à votre projet, téléversez le sketch sur la carte.
Maintenant que vous avez installé votre matériel et votre logiciel pour cette leçon, passons à la conduite de notre voiture !
Étape 1 : Placez votre voiture robot sur le sol et allumez l’interrupteur.
Étape 2 : Allez sur votre téléphone portable → Paramètres → Paramètres Bluetooth et recherchez un appareil Bluetooth appelé HC-02, associez-le avec le code 1234.
Connexion avec un appareil Android:
Si vous utilisez un appareil Android et n’avez pas associé le module Bluetooth à votre téléphone portable, veuillez d’abord associer le module Bluetooth avant d’ouvrir l’application. Dans les paramètres de votre téléphone portable → Bluetooth, recherchez un appareil Bluetooth appelé HC02, associez-le avec le mot de passe 1234. Après que le périphérique Bluetooth HC02 est associé, ouvrez l’application. Cliquez sur le bouton “BT Search” pour connecter l’application au périphérique HC02.
Connexion avec un appareil iOS: Si vous utilisez un appareil iOS, ouvrez simplement l’application, cliquez sur le bouton “Connect”, vous verrez une liste Bluetooth, sélectionnez le périphérique HC02.
Étape 3 : Ouvrez l’application OSOYOO imitation driving Robot, cliquez sur le bouton “BT Search” et recherchez le périphérique Bluetooth avec lequel vous avez associé.
Étape 4 : Allumez la bascule moteur, cliquez sur le bouton “Speed+” pour accélérer la voiture robot, car celle-ci est très lente au départ. Lorsque vous tournez l’angle de votre téléphone portable, votre voiture changera de direction.
Étape 5 : Cliquez sur le bouton de vitesse pour passer en marche avant ou en marche arrière.
Étape 6 : Appuyez sur F1 pour aller à gauche, F5 pour aller à droite, F2 pour une diagonale vers le haut à gauche, F4 pour une diagonale vers le haut à droite, F3 pour mettre en pause.
Réglage de la vitesse du moteur pour de meilleures performances
Pour obtenir de meilleures performances de course, la valeur de puissance du moteur (vitesse) doit être ajustée correctement en fonction du niveau de la batterie. Si la valeur de puissance du moteur (vitesse) est trop élevée, votre voiture peut rouler trop vite et être difficile à contrôler. Si la puissance du moteur (vitesse) est trop faible, la voiture pourrait ne même pas bouger.
Pour ajuster la valeur de puissance du moteur, vous devez modifier les 3 constantes à la ligne 27, 28, 29 du fichier sketch mecanum-2560-lesson4.ino:
MIN_SPEED est la puissance minimale nécessaire pour démarrer la voiture. Si lorsque la bascule moteur de l’application est passée au ROUGE, mais que votre voiture ne bouge pas, vous devez augmenter cette valeur. Si la voiture roule trop vite au moment du démarrage du moteur, vous devez réduire cette valeur.
TURN_SPEED et SLOW_TURN_SPEED déterminent la vitesse de rotation de votre voiture. Si votre voiture tourne trop rapidement, vous devez réduire ces deux valeurs, si elle tourne trop lentement ou ne tourne pas, augmentez ces deux valeurs. Assurez-vous que SLOW_TURN_SPEED est d’environ 20 à 30 inférieur à la valeur de TURN_SPEED.
La valeur BACK_SPEED détermine la vitesse de recul.
Lorsque les batteries sont presque déchargées, vous devrez peut-être augmenter la valeur de ces 3 constantes. Vous pouvez ajouter ou réduire progressivement 10 à chaque fois sur ces valeurs et comparer lesquelles offrent les meilleures performances de suivi.