Vous pouvez télécharger le manuel de l’utilisateur à partir de :

Dans ce tutoriel, nous allons utiliser la voiture pour effectuer quelques mouvements simples. Une fois l’installation de la voiture terminée, il est très important de tester l’installation et le code d’exemple. Si vous avez réussi le mouvement de test de cette leçon, cela signifie que la carte de base OSOYOO pour Arduino, le module de contrôle du moteur, les moteurs, les batteries, le châssis et les connexions des fils entre ces parties fonctionnent bien.
Si vous ne parvenez pas à compléter le châssis de la voiture, veuillez revoir les points suivants leçon 1


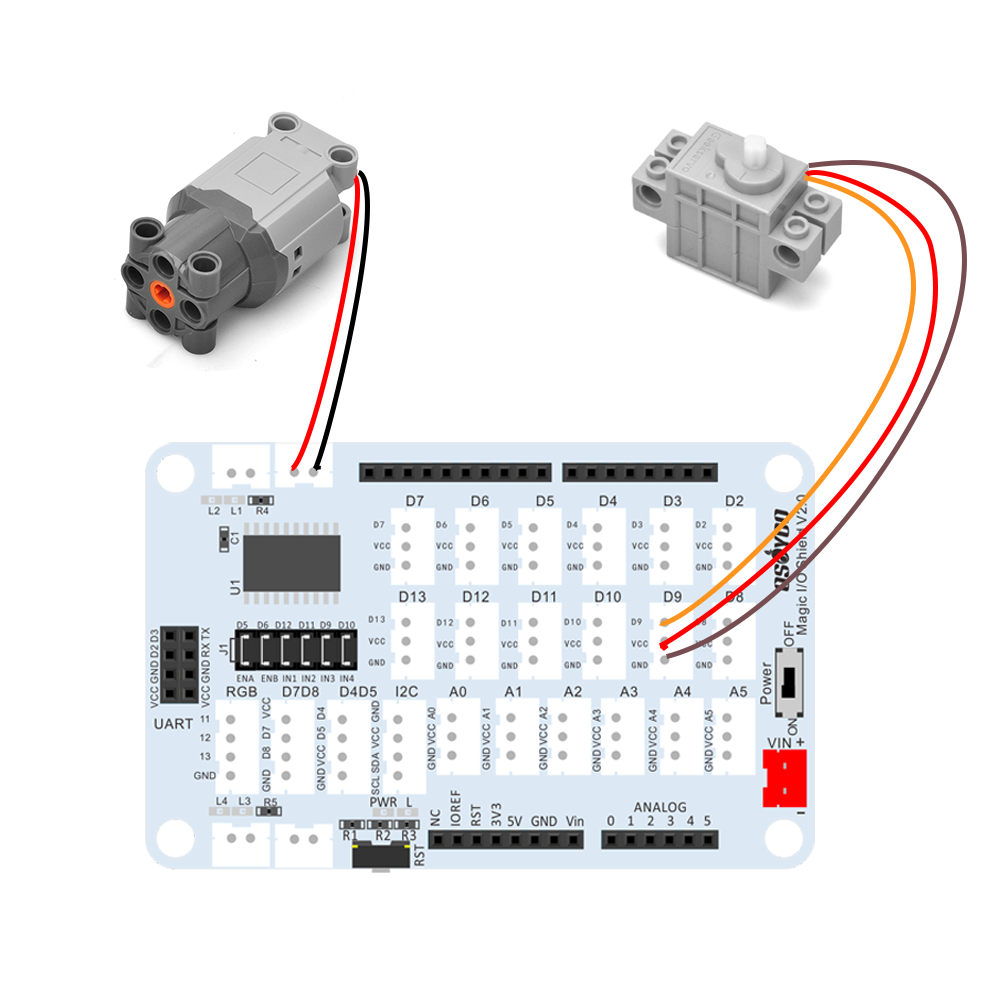
Connexion: (Attention : il y a six cavaliers sur ENA/ENB/IN1/IN2/IN3/IN4)
IN1 à D12 (cavalier)
IN2 à D11 (cavalier)
Moteur vers L1
Servo à D9
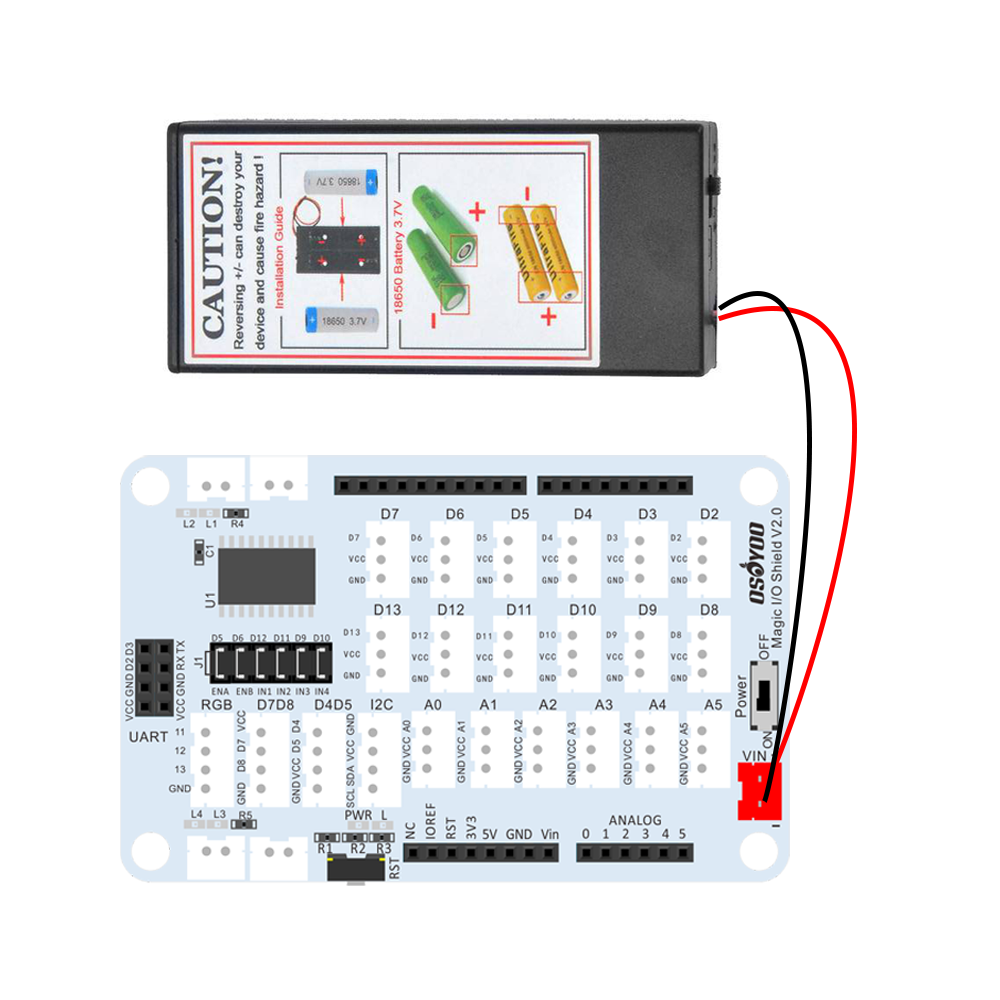
Connectez le boîtier de la batterie au port d’alimentation du bouclier Magic I/O comme suit :
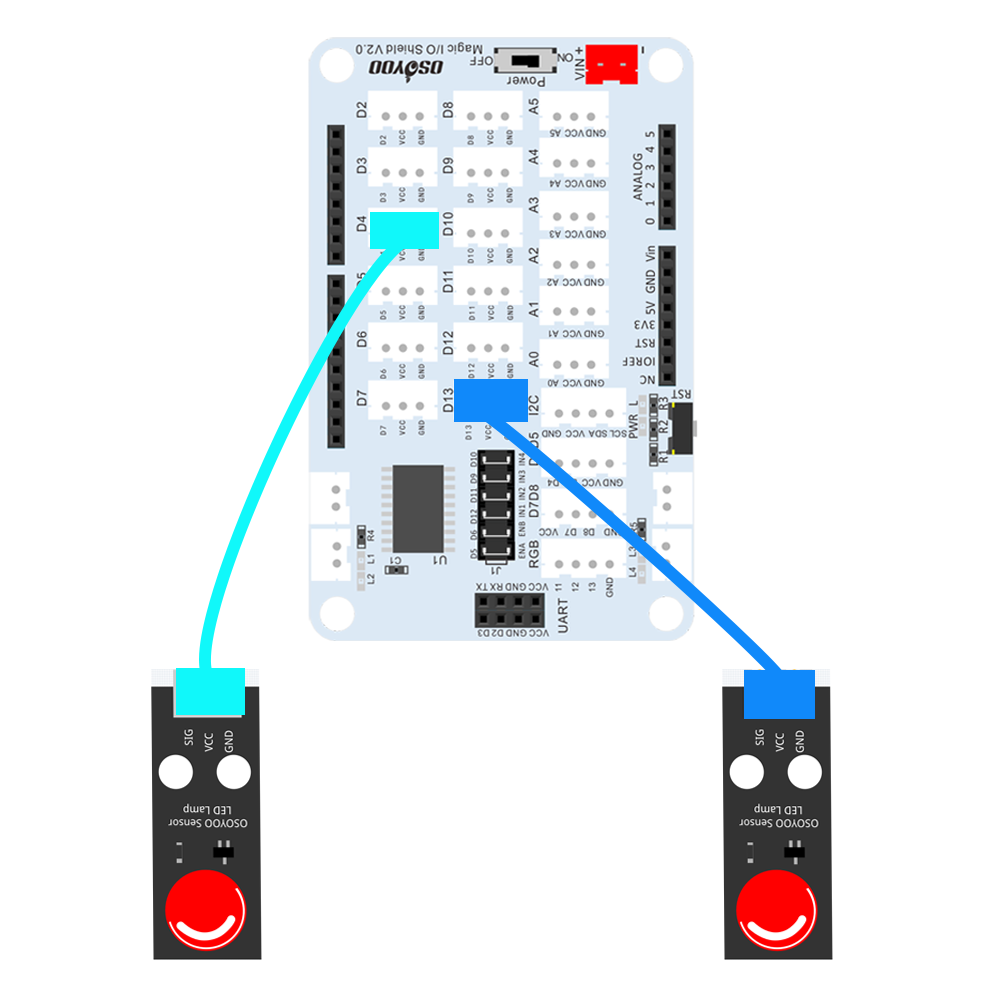
Connectez le module LED rouge OSOYOO au port d’alimentation du bouclier Magic I/O comme suit :
LED gauche – D4
LED droite – D13

ETAPE 1:
Installer la dernière version de l’IDE (Si vous avez la version de l’IDE après 1.1.16, sautez cette étape).
Téléchargez l’IDE depuis https://www.arduino.cc/en/software, puis installez le logiciel.
ETAPE 2:
Télécharger le fichier zip de la bibliothèque PWMServo depuis https://osoyoo.com/driver/sg90car/PWMServo.zip ,
Puis importer la bibliothèque dans Arduino IDE (Ouvrir Arduino IDE-> cliquer sur Sketch->Inclure la bibliothèque->Ajouter la bibliothèque .Zip).

Vous verrez une fenêtre pop-up, maintenant vous pouvez aller dans votre dossier de téléchargement et sélectionner le fichier PWMServo.zip et télécharger ce fichier dans la bibliothèque Arduino.
ETAPE 3:
Téléchargez https://osoyoo.com/driver/2022008400/lesson2.zip , décompressez-le, vous verrez un dossier appelé lesson2.
ETAPE 4:
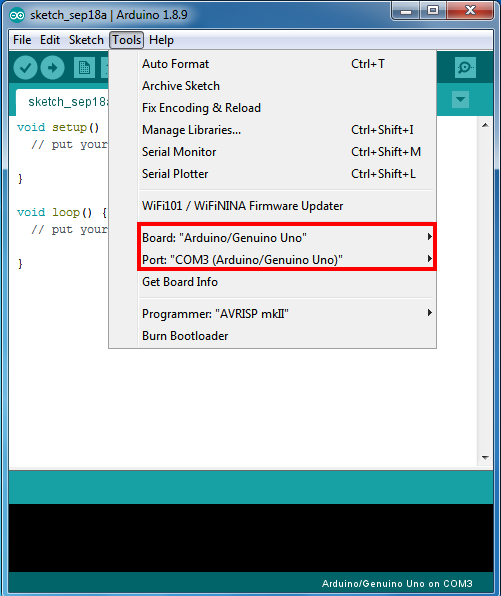
Connectez la carte UNO R3 au PC avec un câble USB, ouvrez l’IDE, choisissez la carte/le port correspondant à votre projet.
Remarque : Eteignez votre batterie ou débranchez votre adaptateur d’alimentation lorsque vous téléchargez le code de l’esquisse sur la carte OSOYOO Basic Board for Arduino.
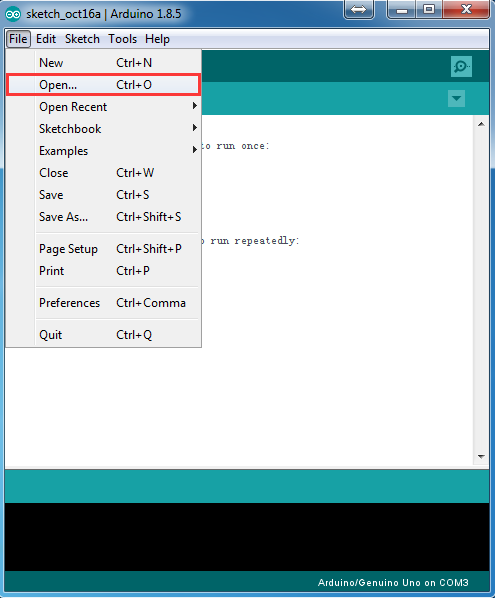
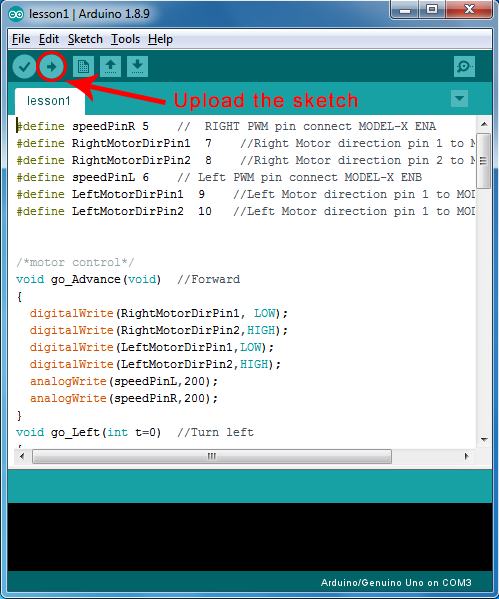
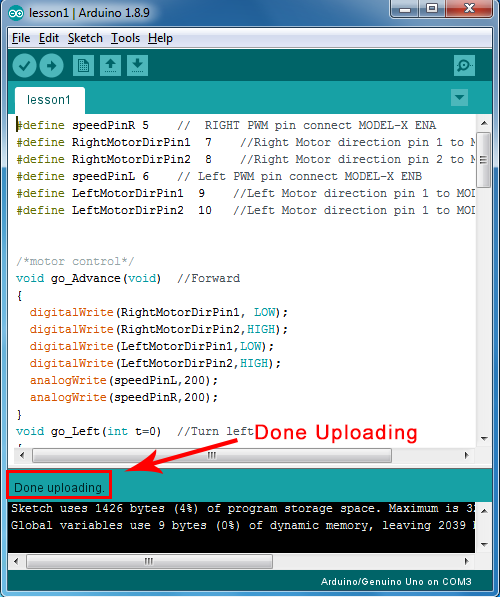
Cliquez sur file -> cliquez sur Open -> choisissez le code “lesson2.ino”, chargez le code dans OSOYOO Basic Board for Arduino, puis téléchargez le sketch sur la carte.
ETAPE 5:
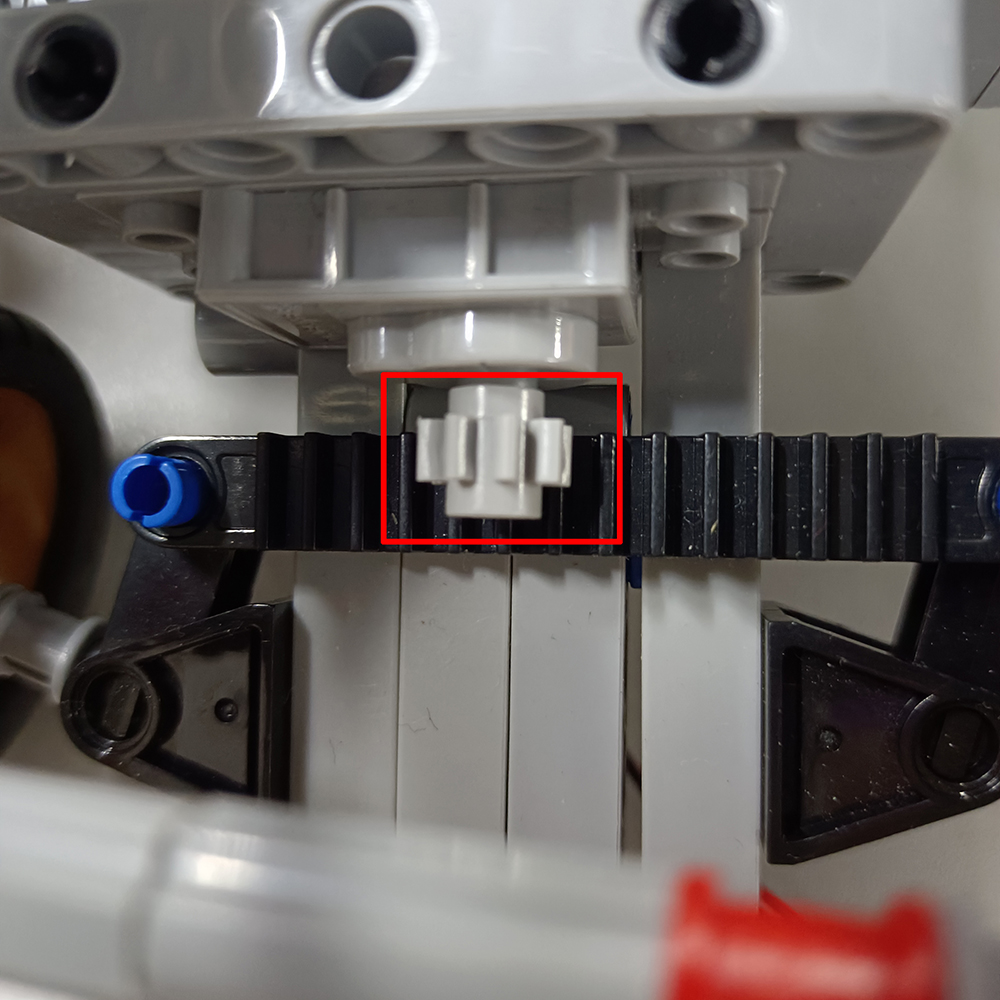
Alignement du servo: Si votre servo de direction ne fait pas face au centre de la direction avant, vous avez deux options :
Option 1 ) Vous pouvez retirer le petit engrenage du servo, réaligner manuellement la direction de la roue avant, puis réinstaller le petit engrenage sur le servo.
Option 2) Vous pouvez modifier la valeur par défaut de la ligne suivante :
#define FRONT 90 // 90 degree means steering to front
Si vos roues directrices tendent vers la gauche, augmentez la valeur de 90 à 95,100,105 …
Si votre volant tend vers la droite, diminuez la valeur de 90 à 85,80,75 …
Exécutez à nouveau le croquis jusqu’à ce que votre volant soit finalement orienté vers l’avant.
Notez ensuite la valeur FRONT, nous utiliserons cette valeur pour modifier le code de l’esquisse lesson3,4,5 et faire en sorte que le servo de direction soit toujours orienté vers l’avant à la valeur FRONT par défaut.

1.débranchez la carte de base OSOYOO pour Arduino du PC et vérifiez que l’interrupteur d’alimentation du bouclier moteur OSOYOO est éteint, puis assurez-vous que la batterie se trouve dans le boîtier de la batterie.
(Note: make sure polar direction is correct, otherwise it can destroy your device and cause fire hazard).
2. Mettez la voiture sur le sol, allumez l’interrupteur du boîtier de batterie et le bouclier moteur OSOYOO, la voiture devrait avancer, reculer, tourner à gauche, tourner à droite, reculer, revenir à droite, revenir à gauche, puis s’arrêter.
Note : Si la voiture ne bouge pas comme indiqué ci-dessus, vous devez vérifier la connexion des fils, les capuchons de cavalier sur le OSOYOO Motor Shield, la tension de la batterie (doit être supérieure à 7.2v)
3. Si vous voulez changer l’ange de droite ou de gauche, veuillez éditer la ligne suivante du code et télécharger le sketch à nouveau :
int RIGHT=FRONT+80;
int LEFT=FRONT-38;
4. Si vous voulez changer la vitesse de la voiture, veuillez réviser le code suivant de l’esquisse (Note : la valeur maximale est de 255)
#define SPEED 190
#define HI_SPEED 220