Benvenuti alla prima lezione di OSOYOO Servo Steer Smart Car per Raspberry Pi!
In questa lezione, installeremo il framework di OSOYOO Servo Steer Smart Car per Raspberry Pi e semplicemente introdurremo l’hardware di questo robot.
Tutte le lezioni si basano sul quadro di questa lezione. Si prega di seguire attentamente questa lezione.
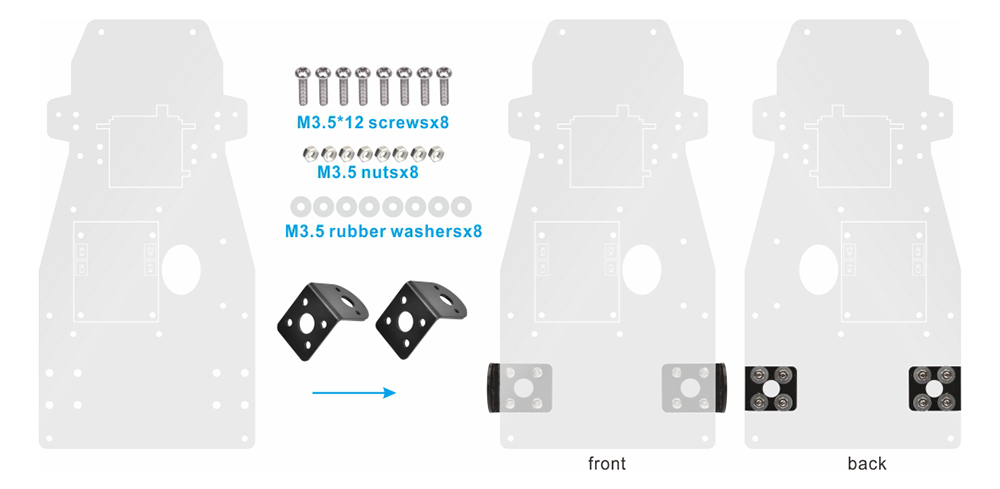
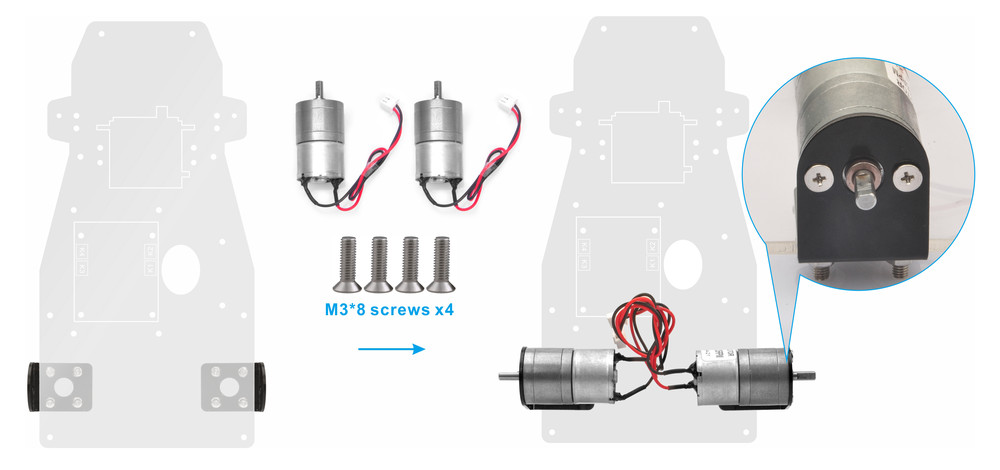
2. Fissare i supporti del motore sul telaio inferiore con viti M3.5*12 da 8 pezzi, dadi M3.5 e rondelle di gomma M3.5. Dall’alto verso il basso, utilizzare il telaio inferiore incrociato con viti M3,5 * 12, supporto motore, rondella in gomma 3,5 e quindi dado 3,5 come segue:
3. Supporto motore trasversale, utilizzare viti M3 * 8 per fissare il motore sul supporto del motore come segue:
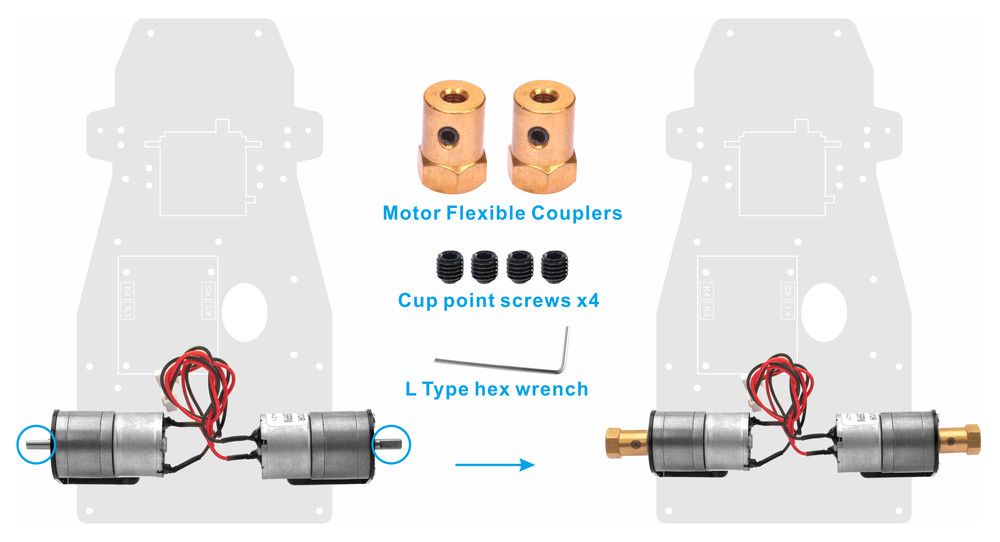
4. Installare gli accoppiatori flessibili del motore sui motori e utilizzare le viti a tazza per fissare gli accoppiatori flessibili del motore sul motore.
L’albero del motore ha un’area piatta su di esso. Assicurarsi che le viti a tazza siano posizionate su questo piatto e serrare entrambe le viti sull’albero.
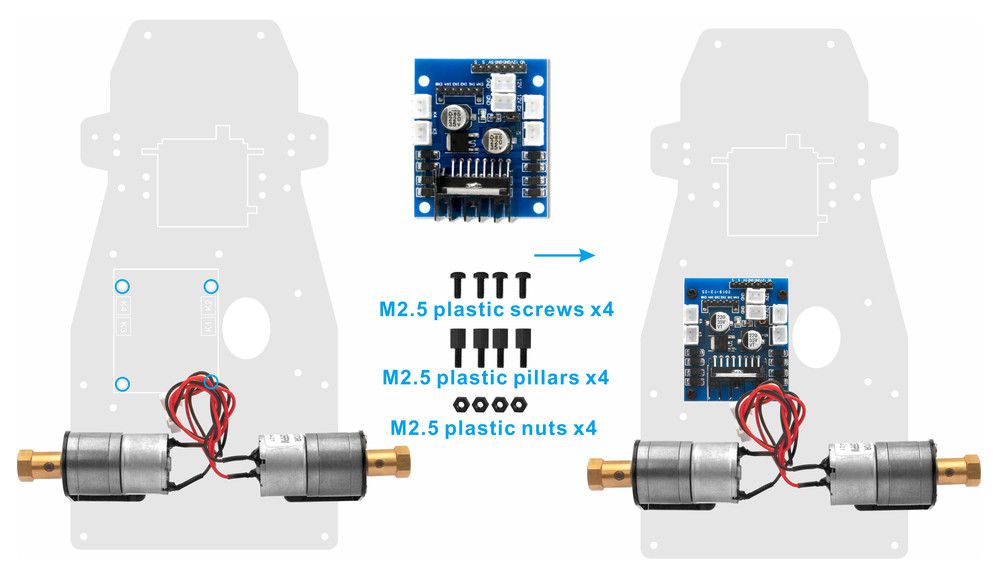
5. Installare il modulo driver motore OSOYOO MODEL X per abbassare il telaio dell’auto con viti in plastica M2.5 da 4 pezzi, montanti in plastica e dadi in plastica. (Assicurati di installare il modulo driver motore OSOYOO MODEL X nella direzione corretta.)
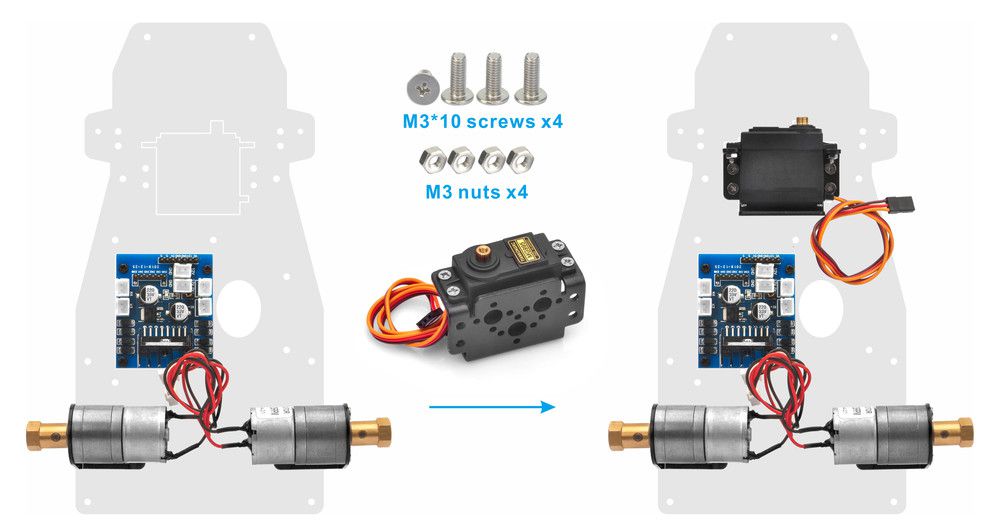
6. Fissare il servomotore sul supporto del servomotore con viti e dadi M3 * 10 come segue:
7. Utilizzare il supporto del servomotore incrociato M3 * 10 con servomotore, telaio inferiore e dado per fissare il servomotore sul telaio inferiore come segue:
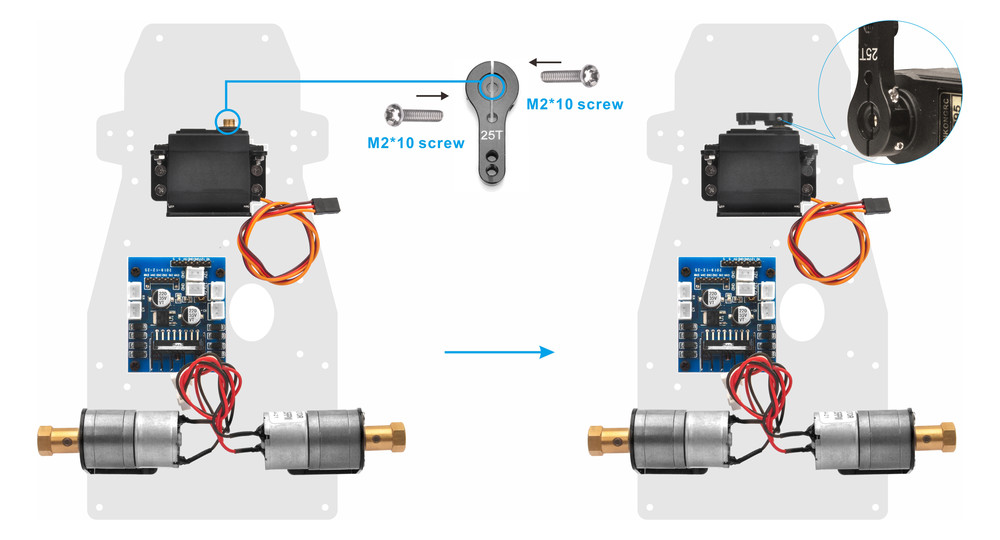
8. Installare il servo horn sul servomotore e installare la vite M2 * 10 su ciascun lato del servo horn come segue:
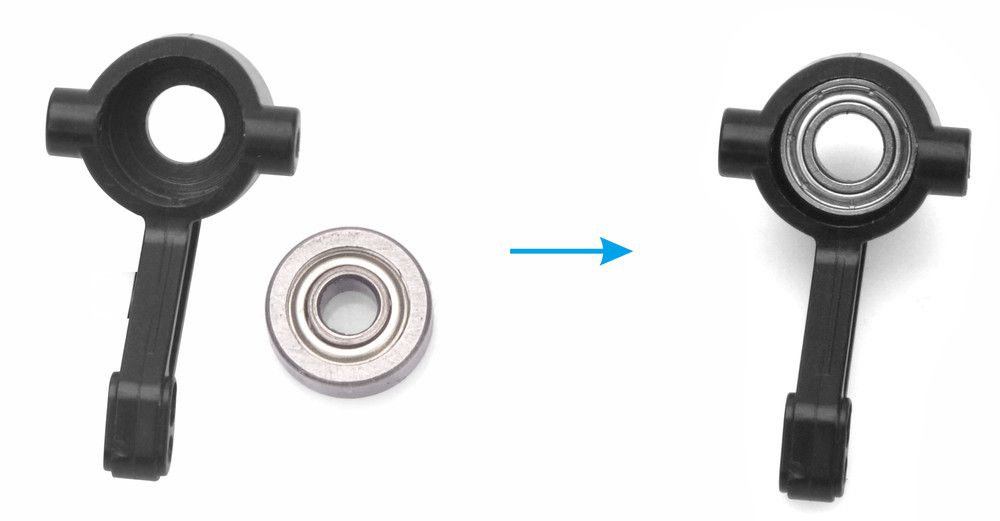
9. Spingere il cuscinetto a rulli 4x12x4 davanti alla tazza dello sterzo RC strettamente come segue:
10. Spingere il cuscinetto a rulli 4x8x4 nella parte posteriore della coppa dello sterzo RC strettamente come segue:
11. Utilizzare la coppa dello sterzo RC incrociata M4 * 20 come segue:
12. Accoppiatori flessibili per motori fissi su vite M4 * 20 con viti a punta a tazza come segue:
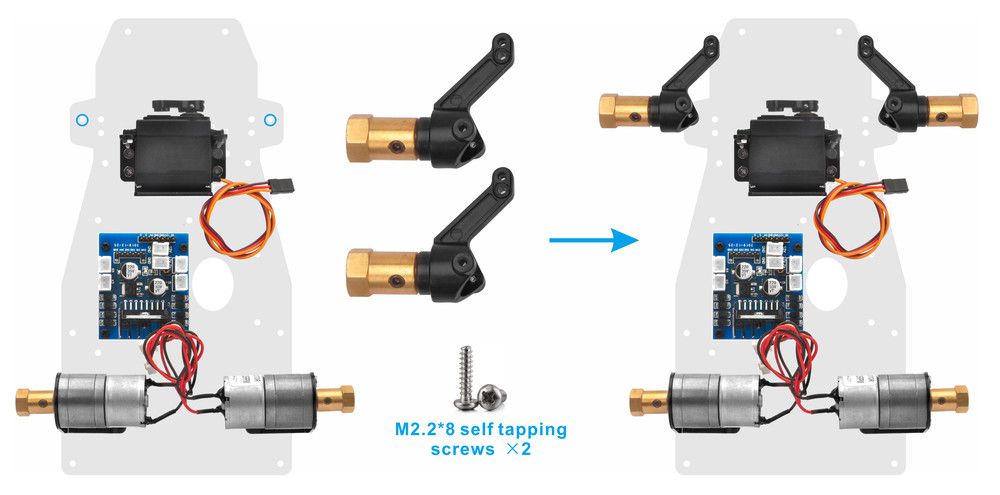
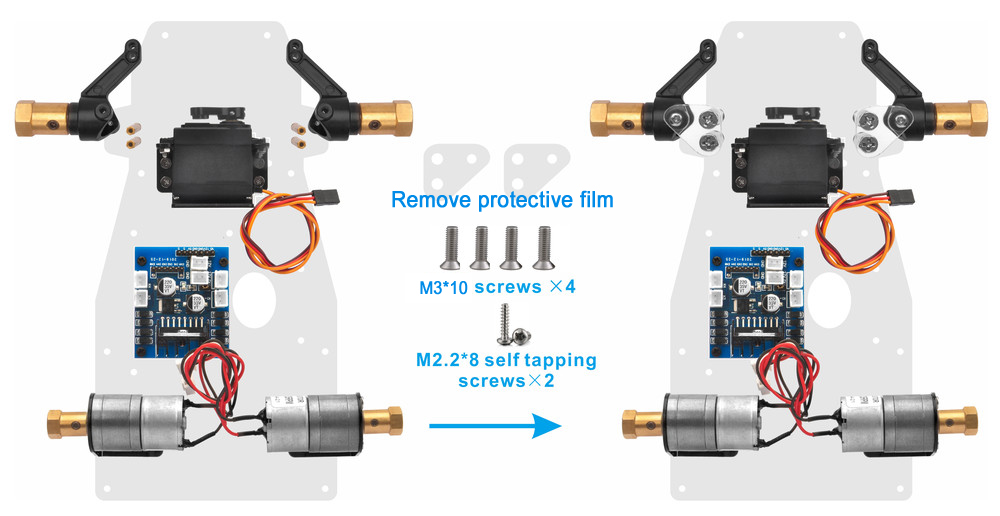
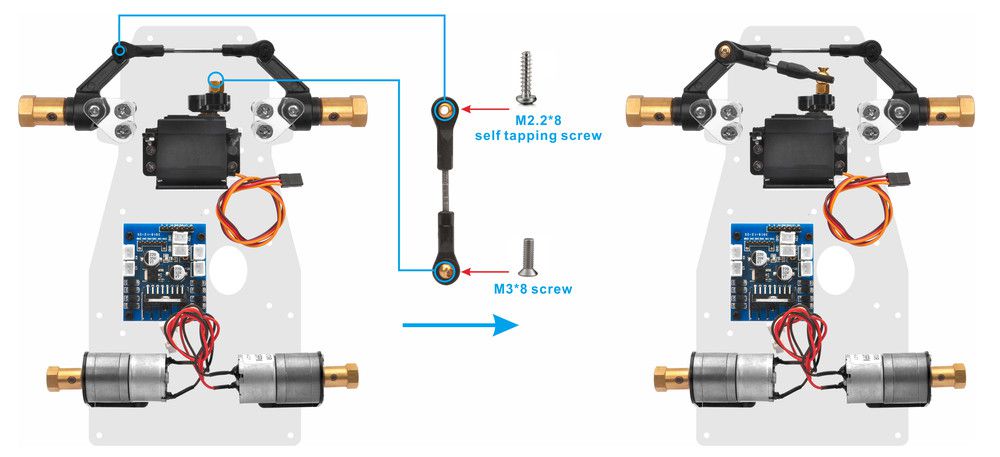
13. Fissare le coppe dello sterzo RC sul telaio inferiore dell’auto con viti autofilettanti M2.2 * 8 come segue:
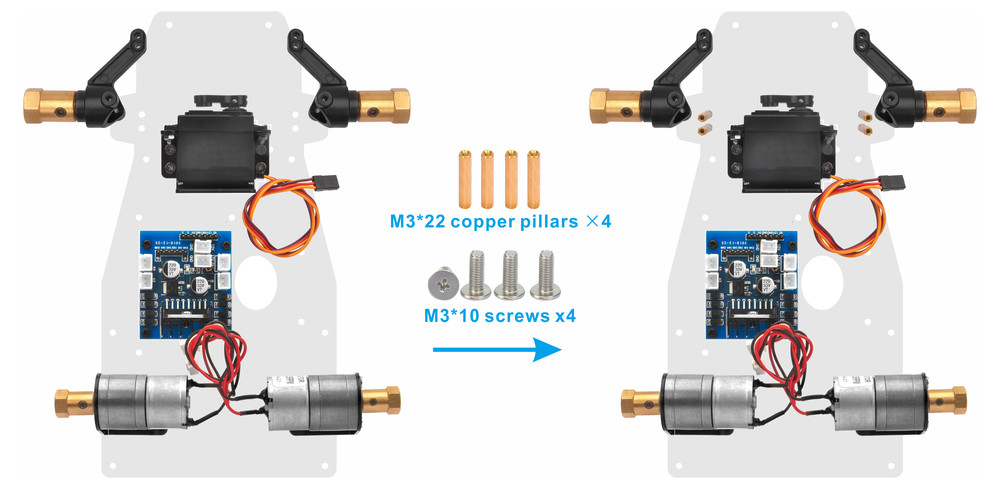
14. Installare i pilastri in rame M3 * 22 accanto ai tazze dello sterzo RC con viti M3 * 10 come segue:
15. Installare lastre acriliche triangolari sui pilastri di rame M3 * 22 e fissarli con viti autofilettanti M2.2 * 8 e viti M3 * 10 come segue:
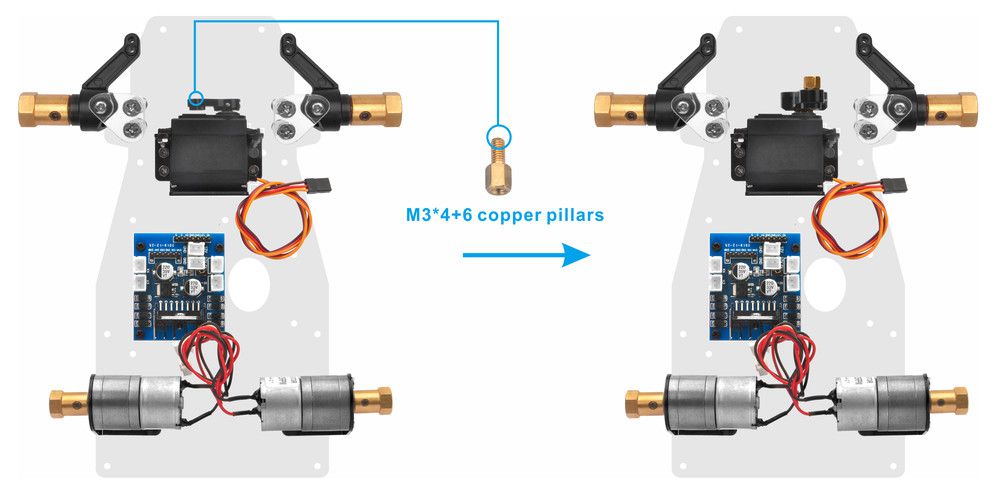
16. Installare il pilastro di rame M3 * 4 + 6 sul servo horn come segue:
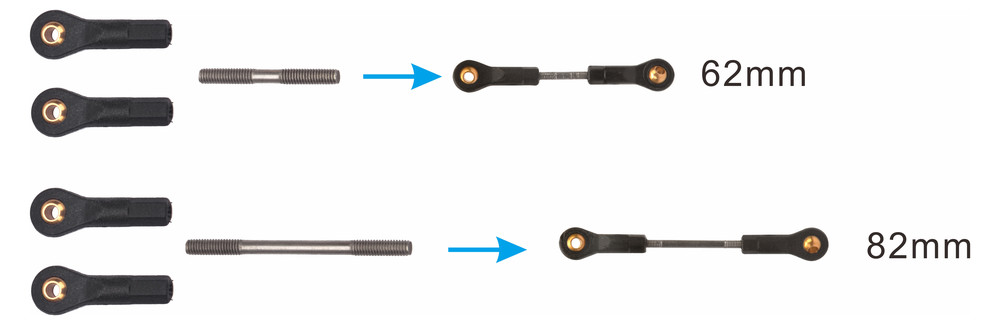
17. Fissare 2 bielle con cuscinetti radiali a stelo e assicurarsi che le lunghezze di questi siano di circa 62 mm e 82 mm
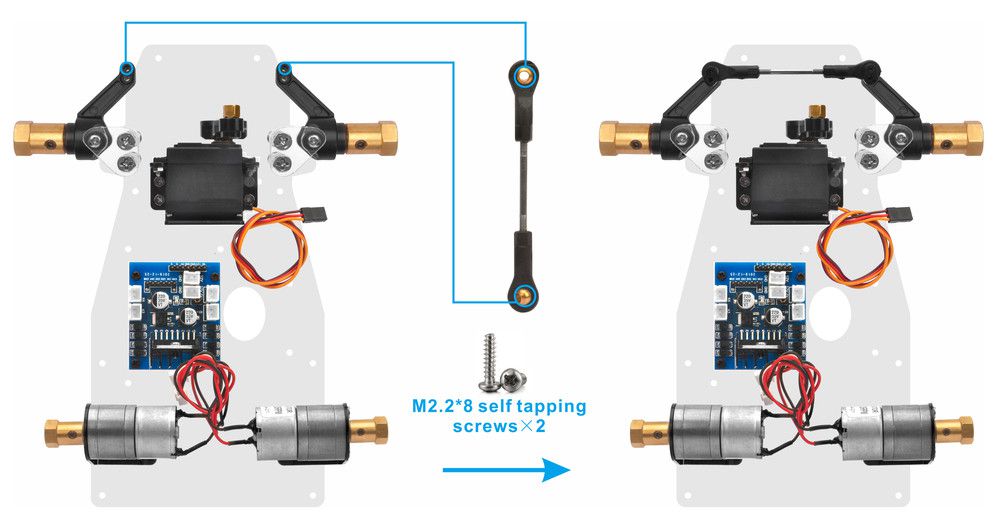
18. Installare due estremità della biella da 82 mm sotto le coppe dello sterzo RC con viti autofilettanti 2pcs M2.2 * 8 come segue (Nota: quando si installa biella da 82 mm, tenere parallele le teste di due coppe RC o è necessario regolare la lunghezza di questa biella):
19. Installare un’estremità della biella da 62 mm sulla tazza dello sterzo RC sinistra con vite autofilettante M2.2 * 8 e l’altra estremità sul pilastro in rame M3 * 4 + 6 con vite M3 * 8 come segue (Nota: quando si installa la biella da 62 mm, tenere il corno servo perpendicolare al micro servo, oppure è necessario regolare la lunghezza di questa biella):
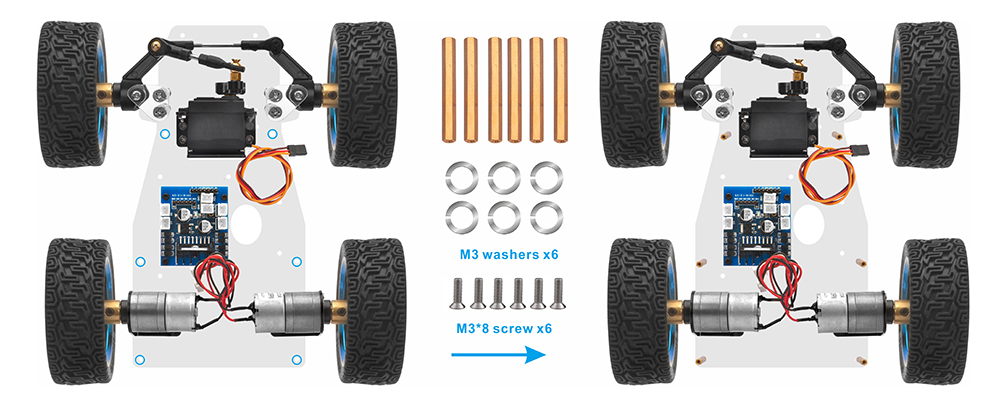
20. Installare 4 ruote su accoppiatori flessibili del motore con viti M4 * 6 come segue:
21. Dal basso verso l’alto, utilizzare il lavaggio M3 * 8 incrociato M3, il telaio inferiore e il pilastro in rame M3 * 45 per fissare il pilastro in rame M3 * 45 su telaio basso come segue:
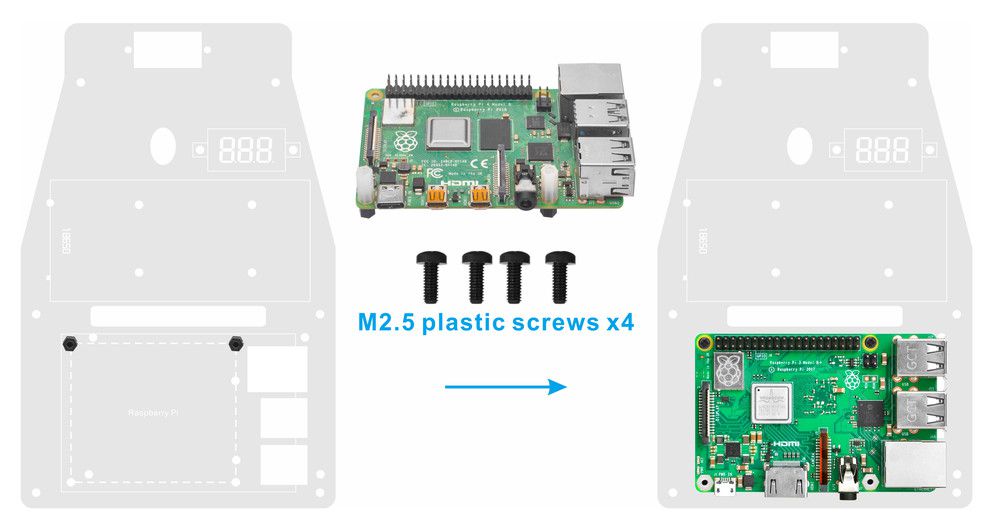
22. Utilizzare la croce del pilastro di plastica M2.5 Raspberry Pi e il pilastro di plastica M2.5 * 13 dal basso verso l’alto e fissare i pilastri di plastica M2.2 * 5 di 13pcs su Raspberry Pi come segue:
23. Fissare i pilastri in plastica M2.2 5pcs sul telaio superiore come segue:
24. Installare viti in plastica 2pcs M2.5 sotto il telaio e viti in plastica 2pcs M2.5 su Raspberry Pi
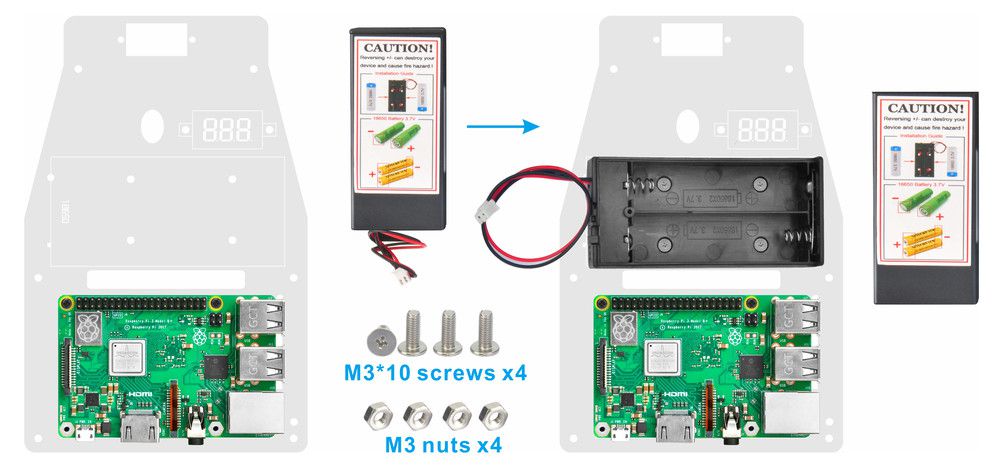
25. Fissare la scatola della batteria 18650 sul telaio superiore con viti M3 * 10 e dadi M3
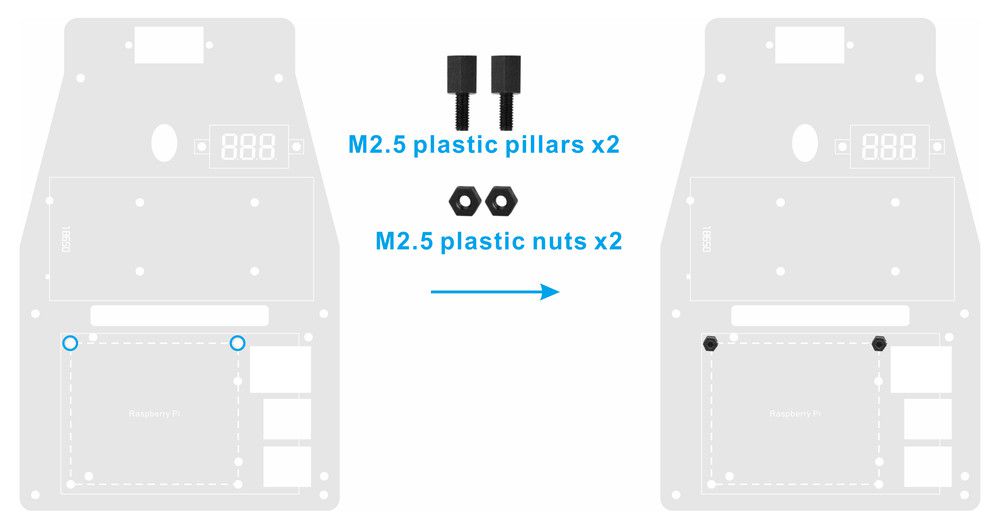
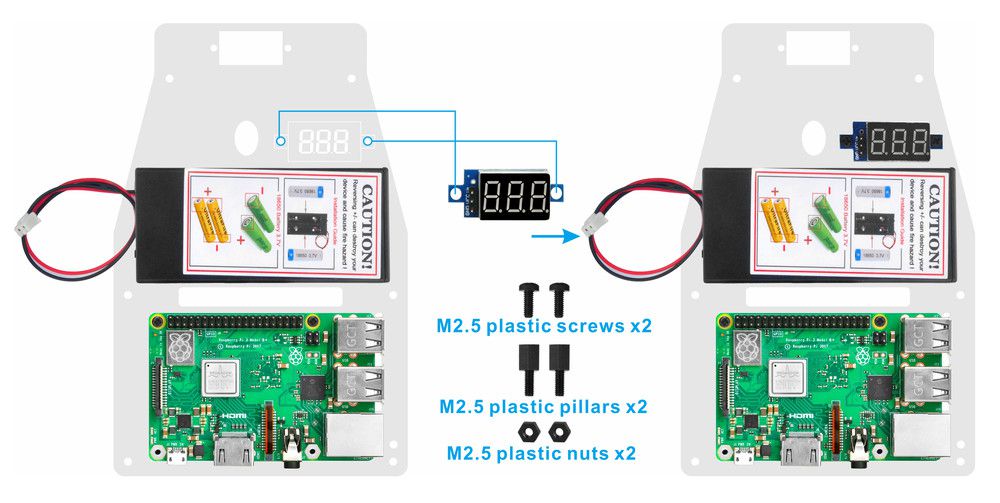
26. Installare il misuratore di tensione sul telaio superiore dell’auto con viti in plastica M2.2 da 5 pezzi, pilastri in plastica e dadi di plastica
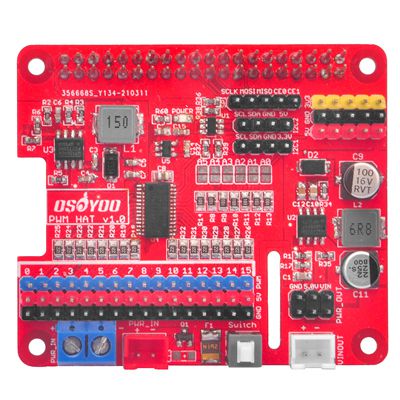
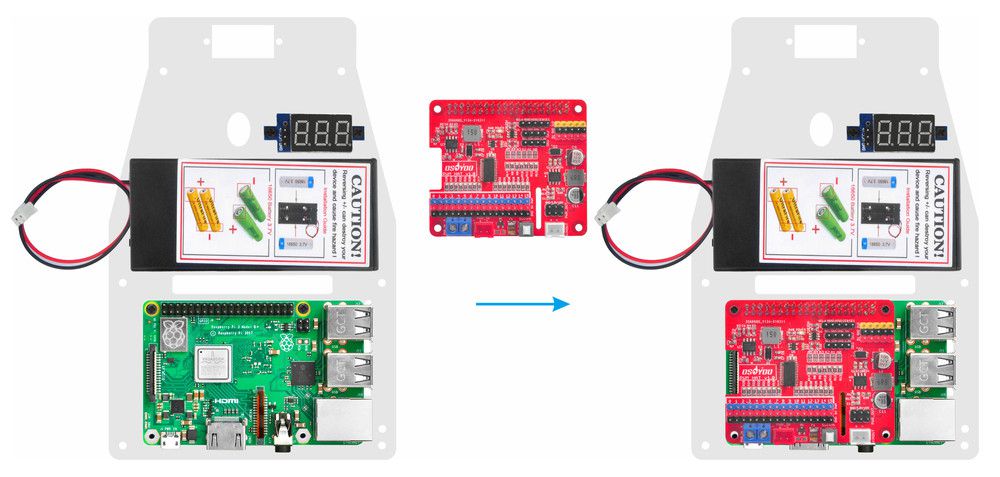
27. Inserire OSOYOO PWM Hat V1.0 su Raspberry Pi come segue: Nota:
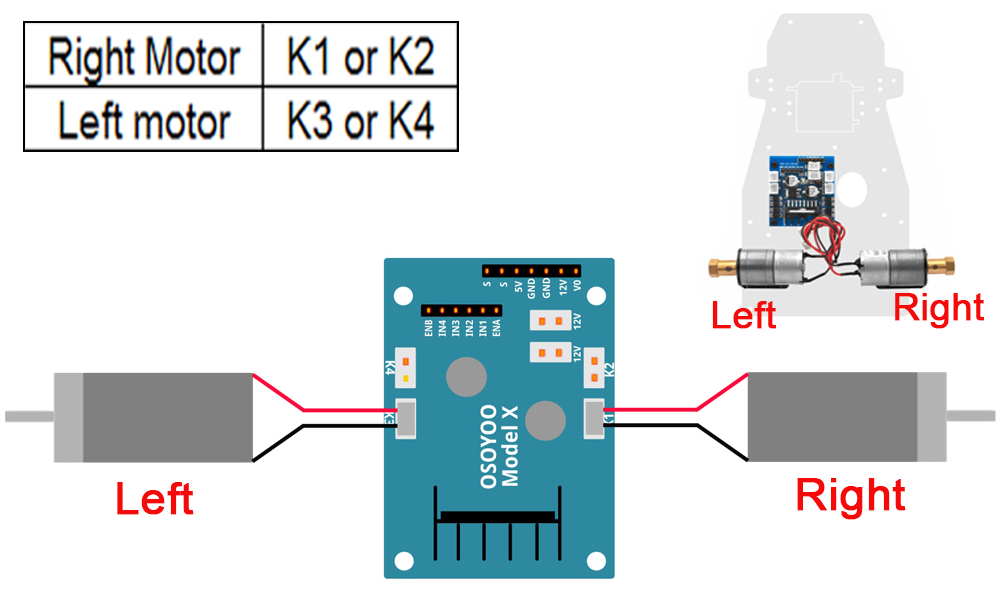
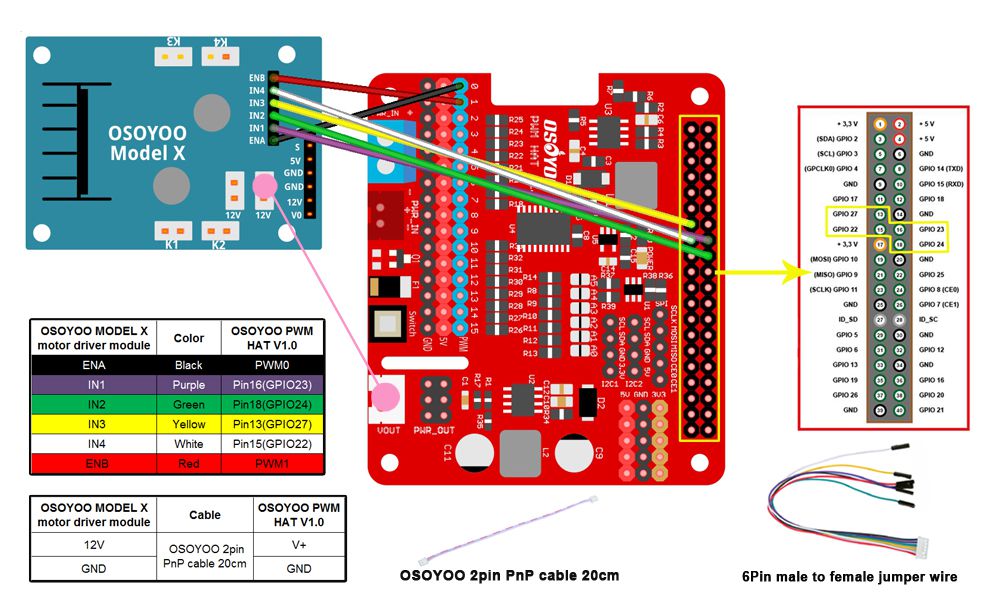
1) Collegare il motore sinistro al modulo driver motore OSOYOO MODEL X K3 o K4 e il motore destro alla presa K1 o K2 come segue grafico:
2) Collegare il modulo driver motore OSOYOO MODEL X al cappello PWM OSOYOO V1.0 con 6Pin femmina al filo del ponticello femmina, collegare anche il cavo 2pin 20cm come seguente grafico
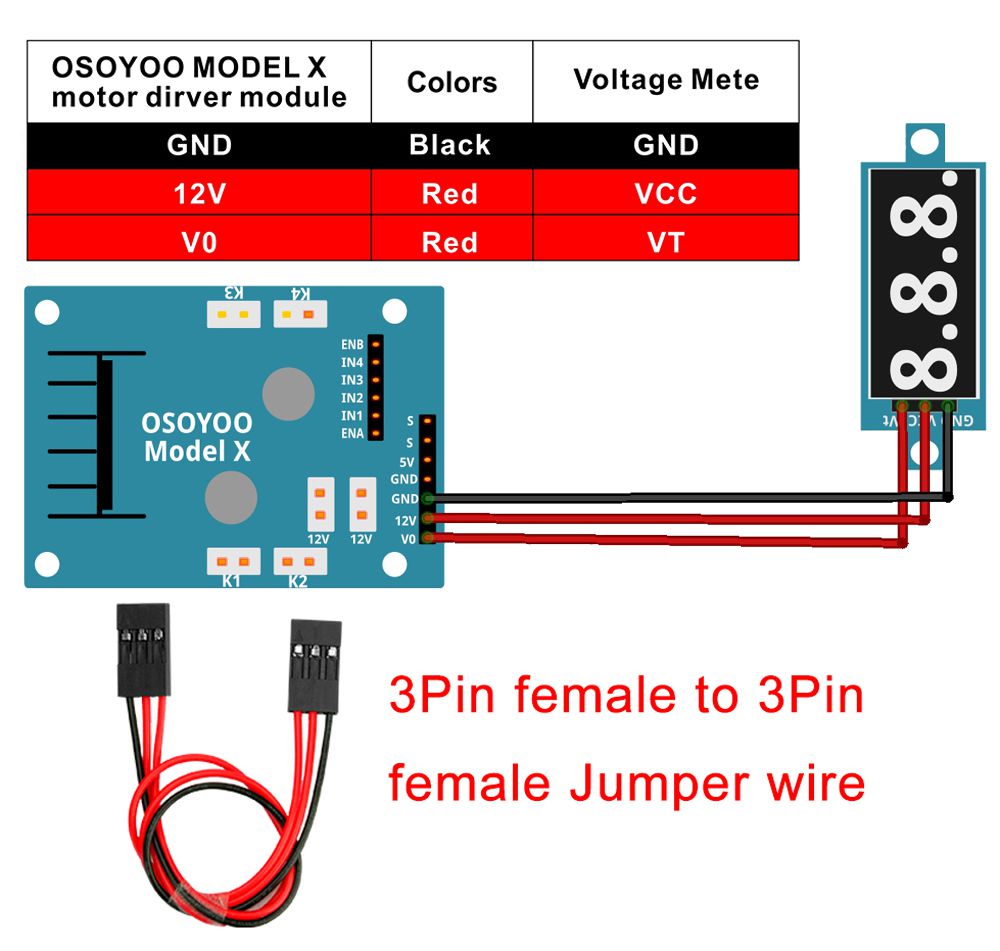
3) Collegare il misuratore di tensione al modulo driver motore OSOYOO MODEL X con fili del ponticello da femmina a femmina a 3 pin come sotto la connessione
diagramma
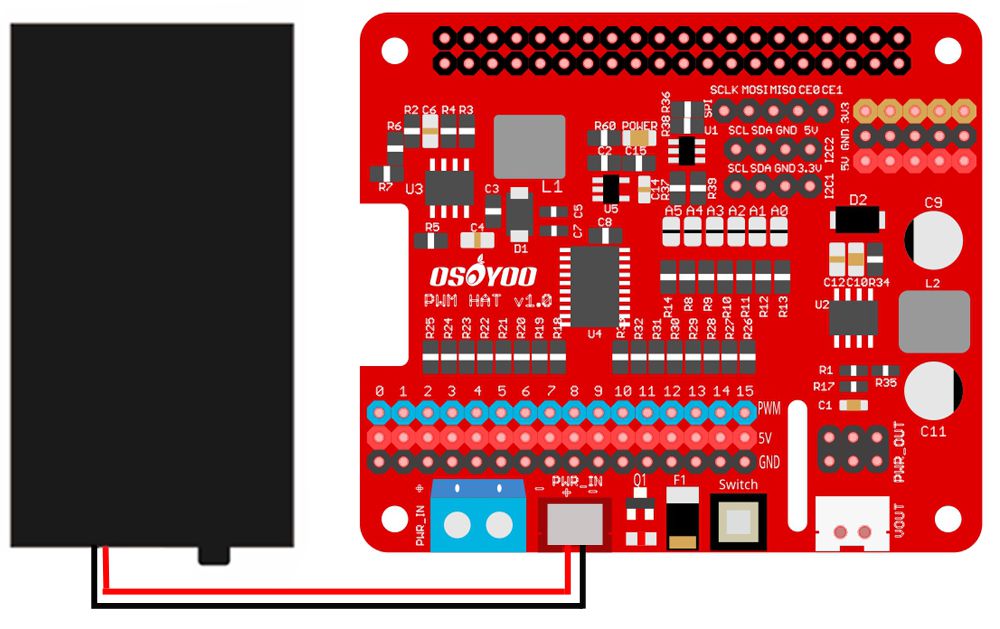
4) Collegare la scatola della batteria 18650 a OSOYOO PWM Hat V1.0 come sotto schema di connessione
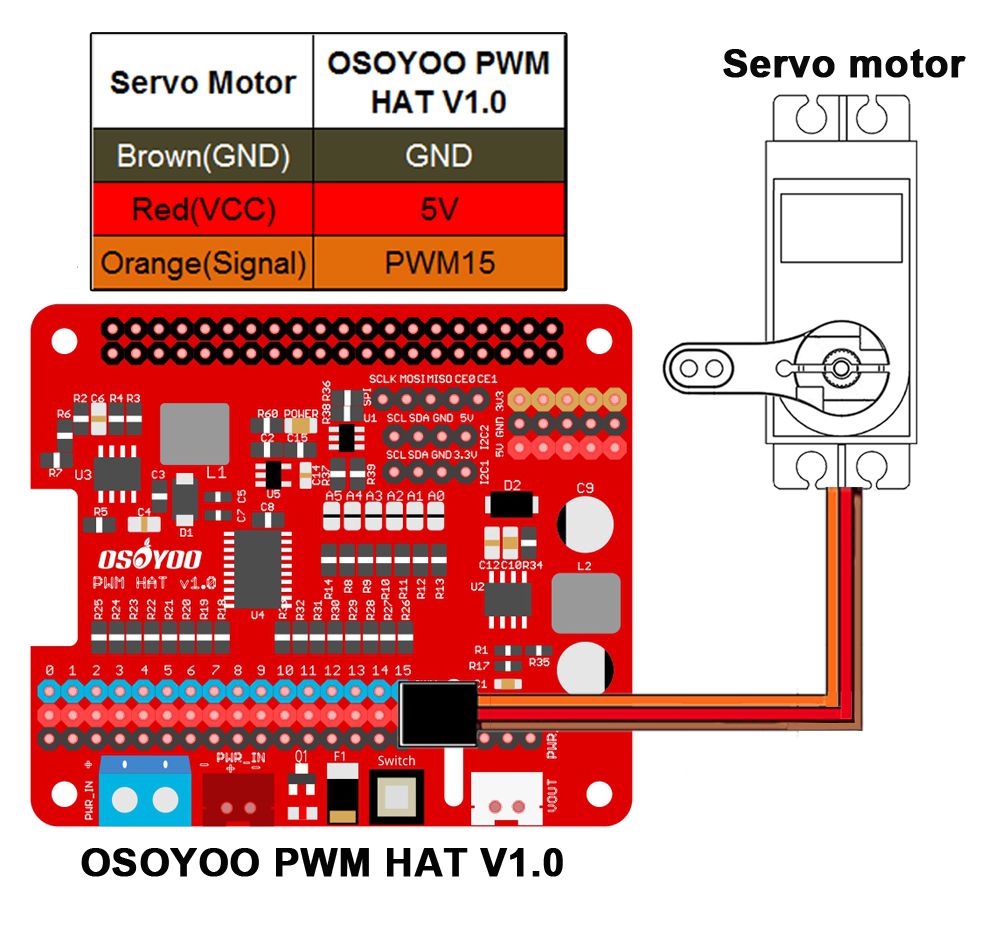
5) Collegare il servomotore a 15 di OSOYOO PWM Hat V1.0 come segue:
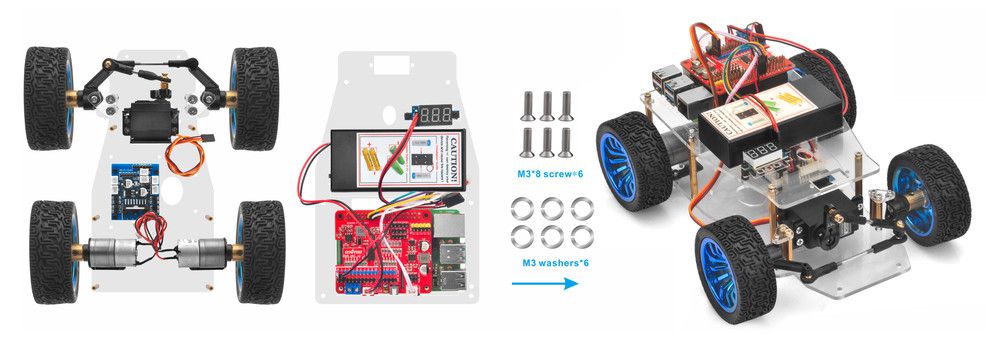
6) Collegare il telaio superiore al telaio inferiore con 6 pilastri in rame e fissare i pilastri in rame con viti M3 * 8 e lavaggi M3 come segue:
7) Si prega di installare le batterie 18650 nella scatola della batteria per 18650 come da seguente istruzione (Nota: controlla le istruzioni della casella e assicurati che la direzione polare sia corretta, altrimenti potrebbe distruggere il tuo dispositivo e causare rischi di incendio.):
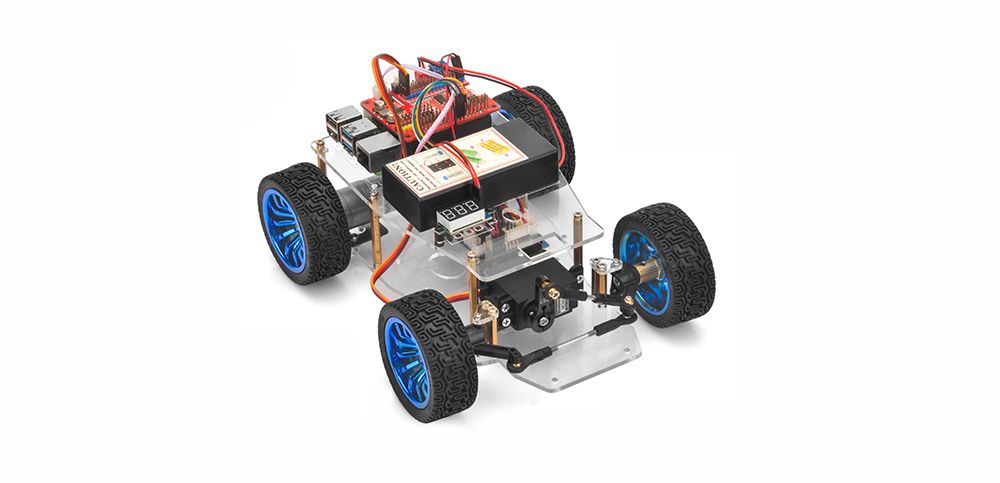
Ora l’installazione dell’hardware è quasi inattiva.