Benvenuti alla prima lezione di OSOYOO Sport Car per Arduino!
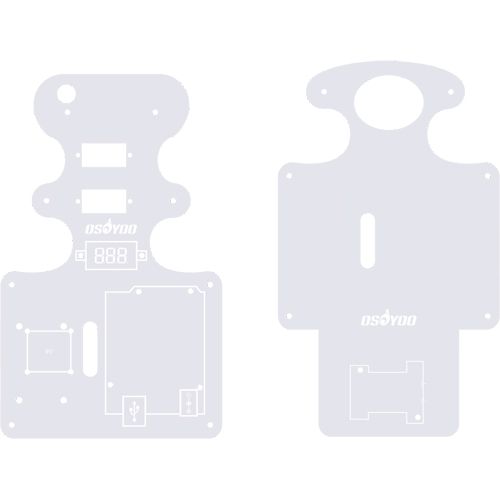
In questa lezione, installeremo la struttura dell’auto robot e allineeremo il servosterzo per rendere l’auto rivolta verso la parte anteriore
Poiché gli esperimenti nelle lezioni future sono tutti basati sul framework della Lezione 1, è molto importante testare correttamente l’installazione e il codice di esempio in questa lezione.
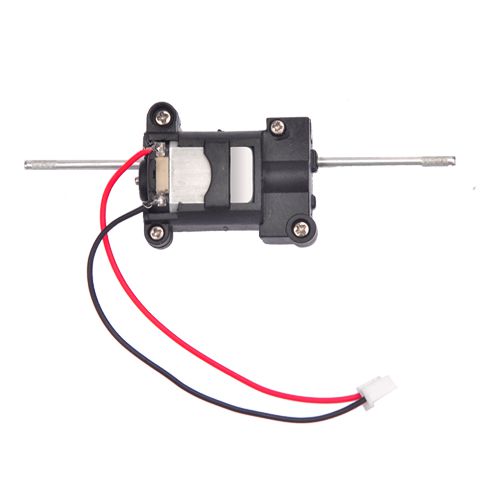
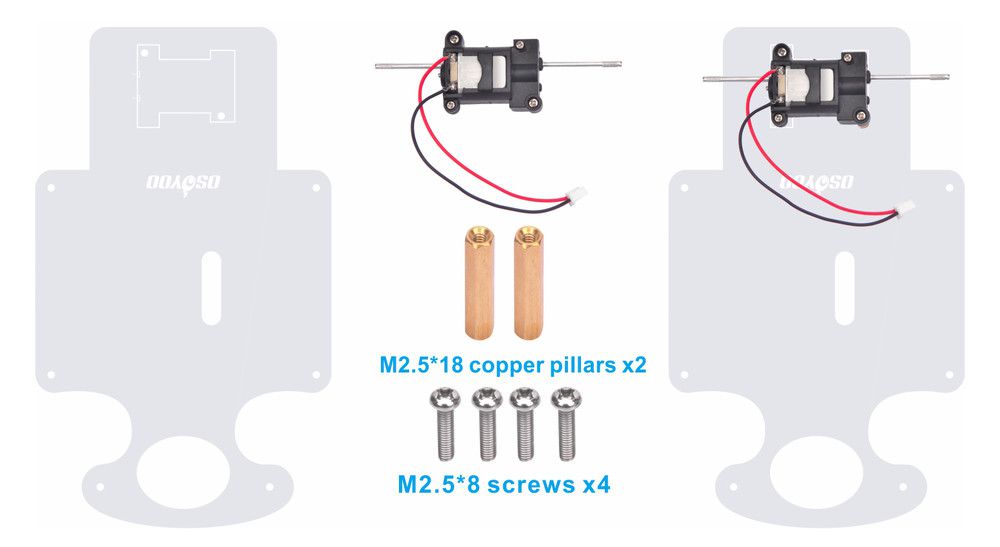
2. Fissare il motore sul telaio inferiore con 2 pilastri in rame M2.5 * 18 e viti M2.5*8 da 4 pezzi come segue:
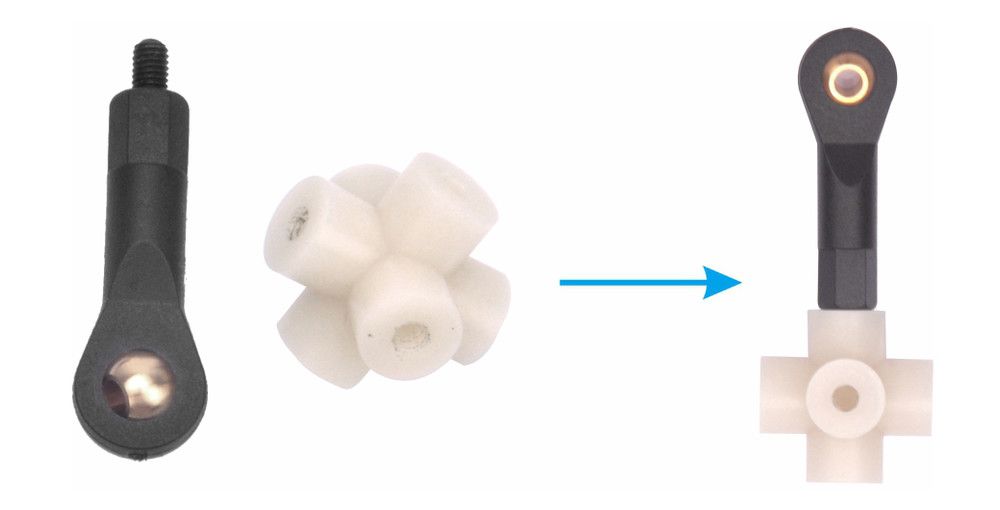
3. Collegare il bicchiere dello sterzo con il cuscinetto dell’estremità dello stelo come segue (attenzione: due fori che possono essere attraversati da un lato all’altro sono usati per fissare la ruota, si prega di non installare parti su questi due fori):
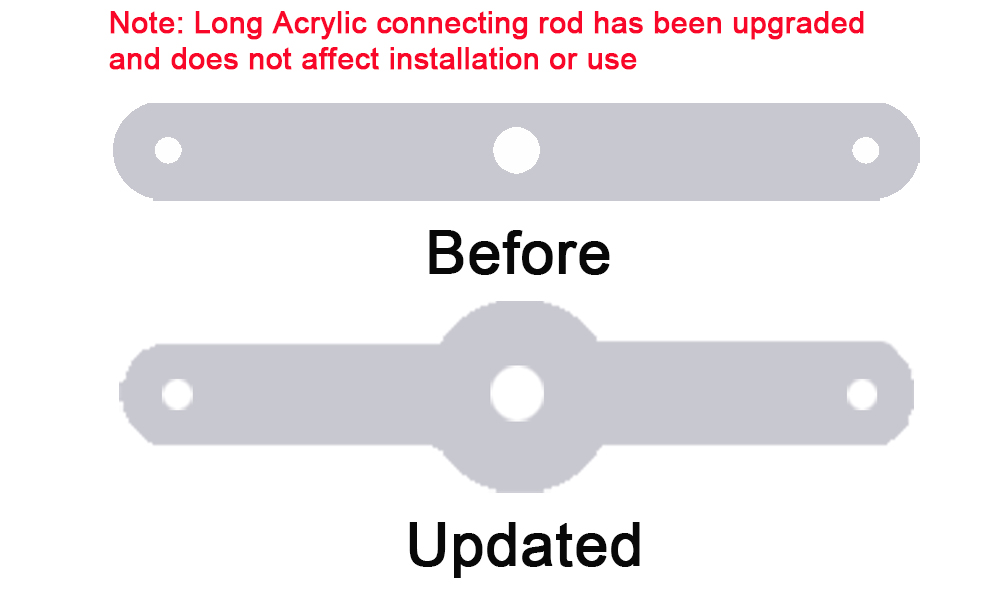
4. Installare i cuscinetti terminali dello stelo 2pcs sulla biella acrilica lunga come segue (Nota: la biella acrilica lunga è stata aggiornata e non influisce sull’installazione o sull’uso):
5. Installare il servo horn nero (dal pacchetto del servomotore arancione) sulla biella acrilica corta come segue:
6. Installare la biella acrilica corta sulla biella acrilica lunga con rivetto metallico M5 * 6 come segue:
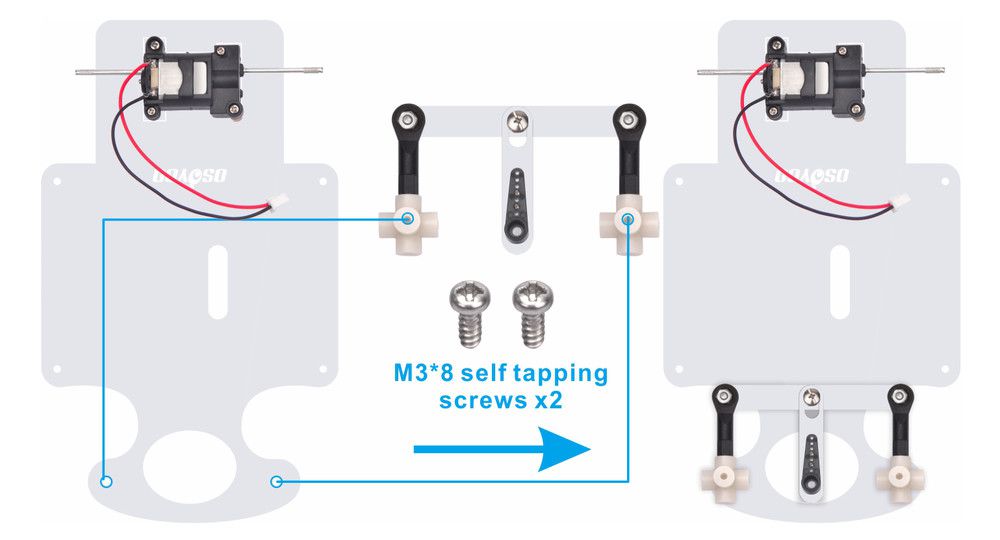
7. Fissare la tazza dello sterzo 2pcs sul telaio inferiore con viti autofilettanti 2pcs M3 * 8 come segue:
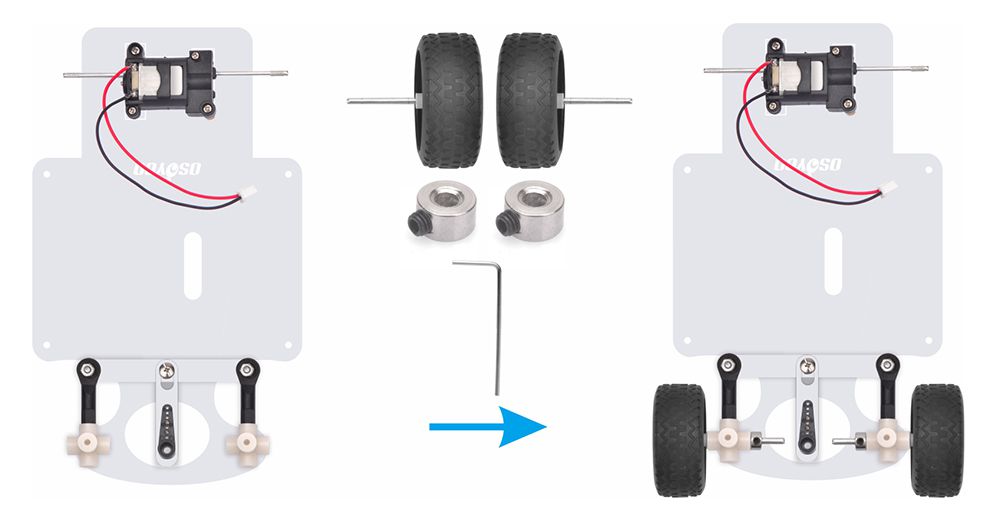
8. Installare le ruote 2pcs su asta metallica come segue:
9. Attraversare le ruote 2pcs attraverso il bicchiere dello sterzo e utilizzare la chiave di tipo L per fissarli con manicotto metallico come segue:
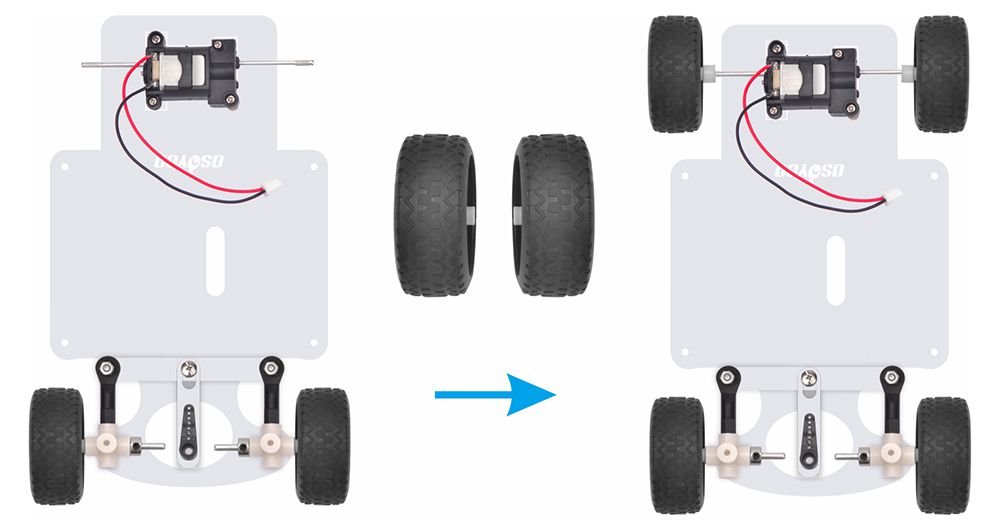
10. Installare le altre ruote 2pcs sul motore come segue:
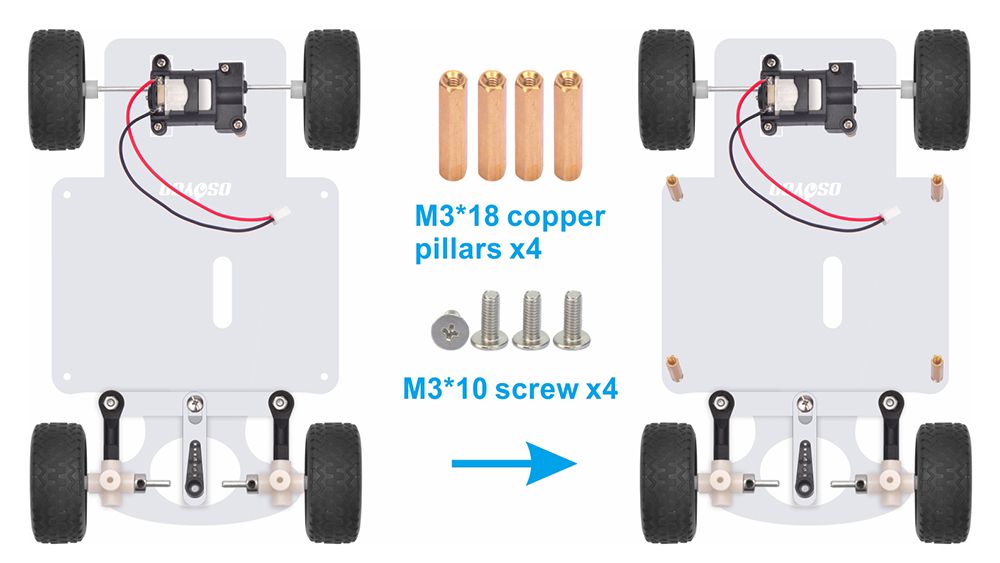
11. Installare 4pcs M3 * 18 pilastri in rame sul telaio inferiore dell’auto con viti M3 * 10 come segue:
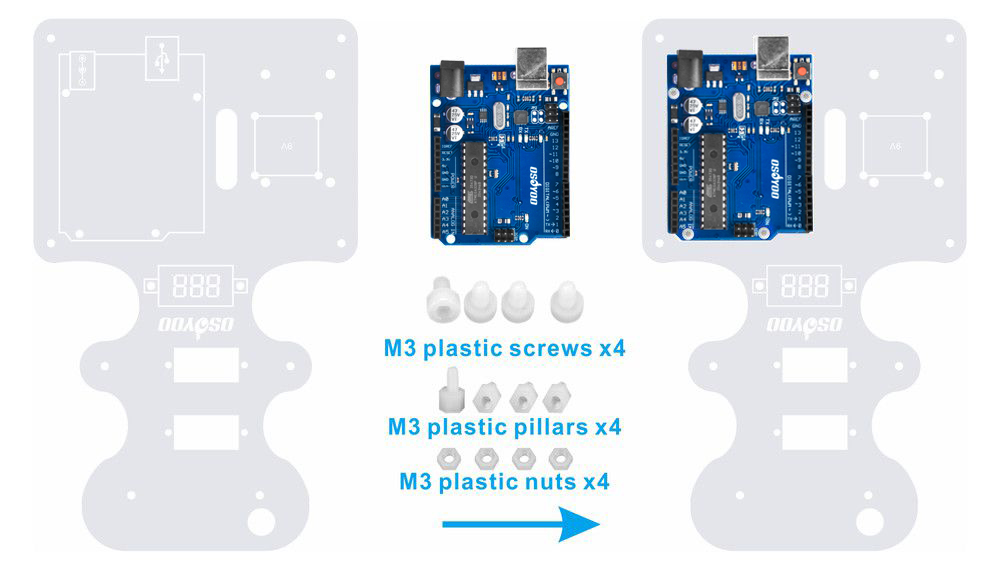
12. Utilizzare un cacciavite esagonale per installare la scheda OSOYOO UNO sul telaio superiore dell’auto con viti, pilastri e dadi in plastica M3 come segue:
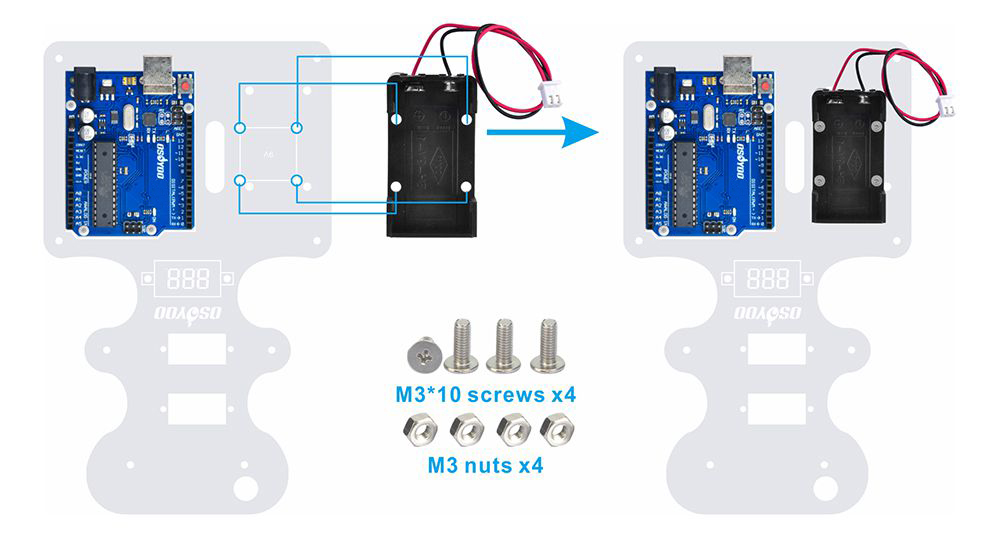
13. Installare la scatola della batteria da 9 V sul telaio con viti e dadi M3 Phillips come segue:
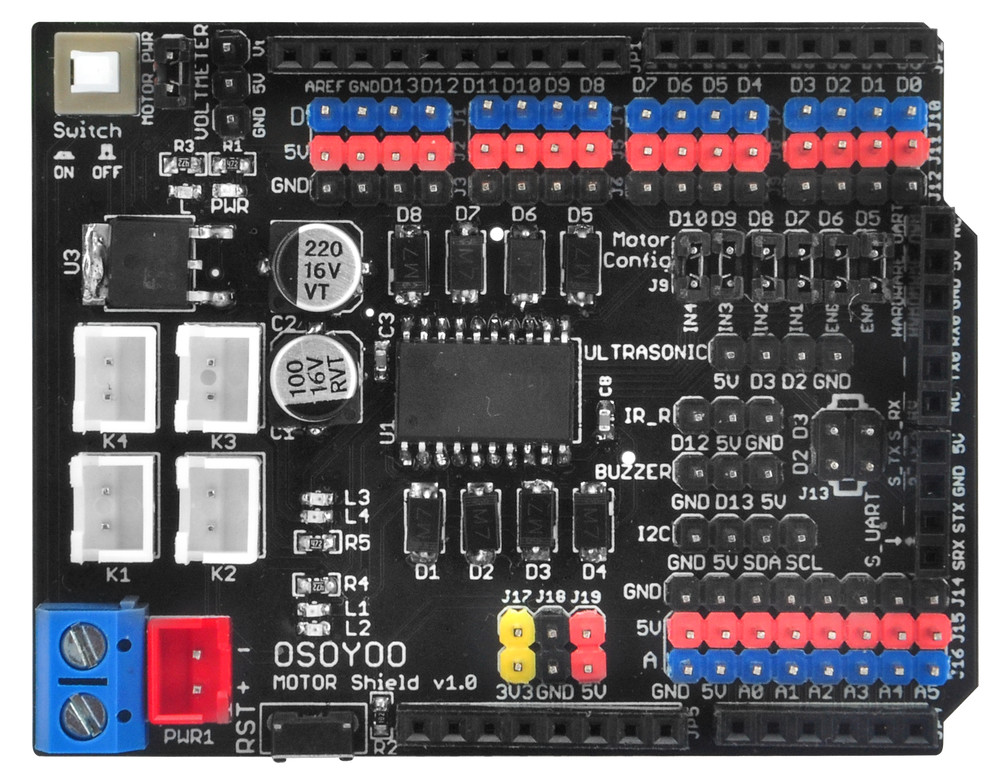
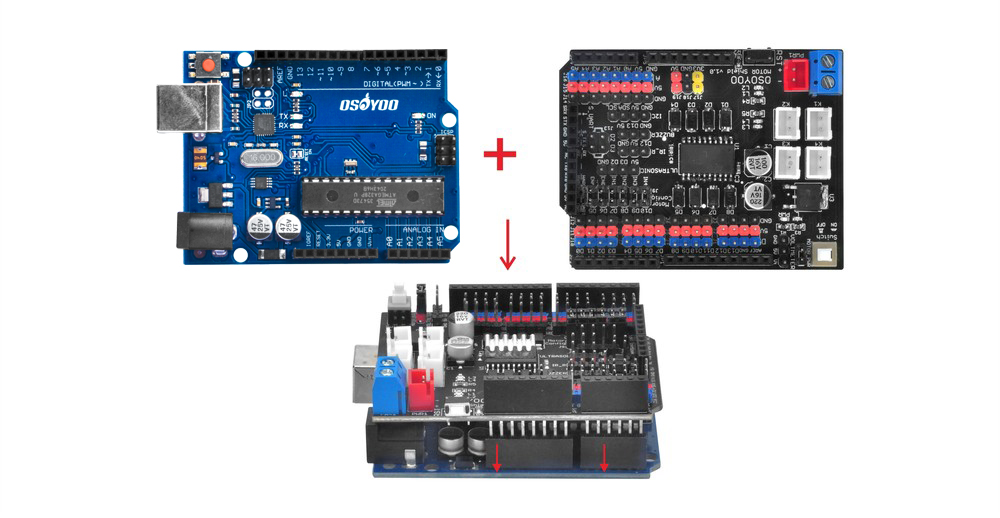
14. Collegare la scheda OSOYOO Motor Shield nella scheda OSOYOO UNO come segue
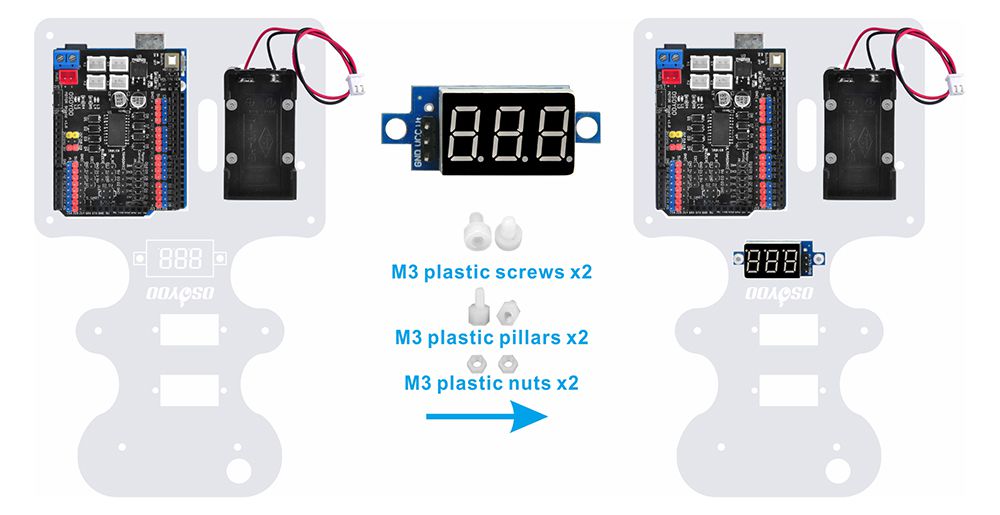
15. Installare il misuratore di tensione sul telaio con viti, pilastri e dadi in plastica M3 come segue:
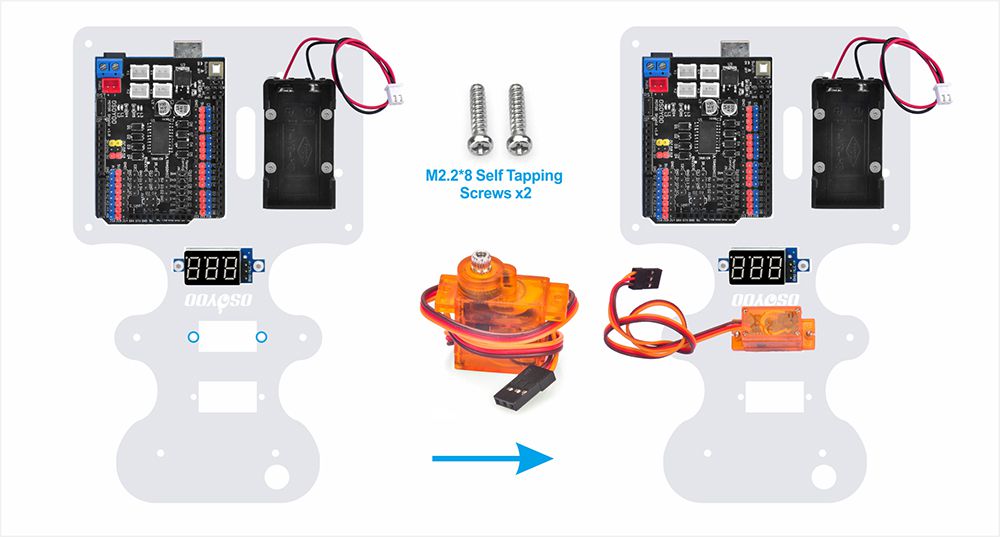
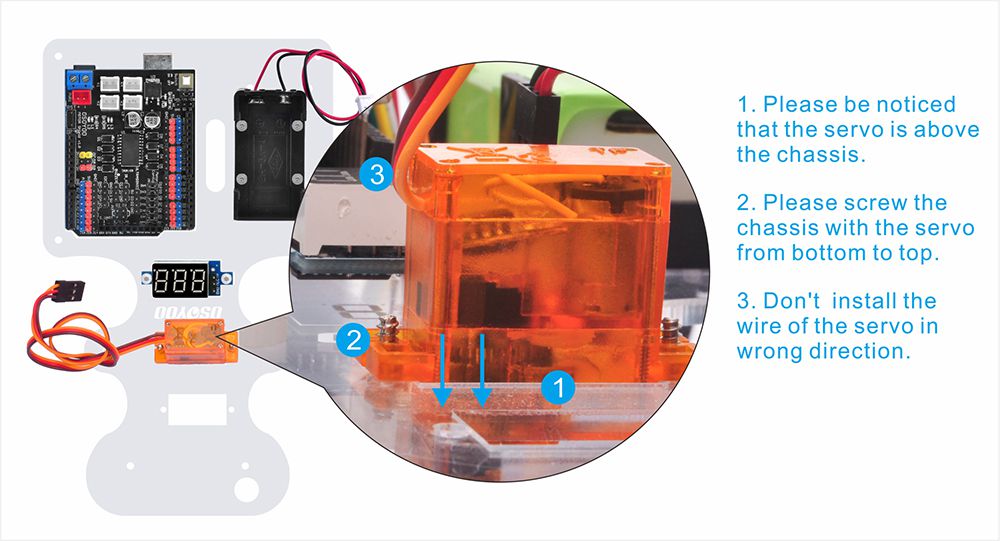
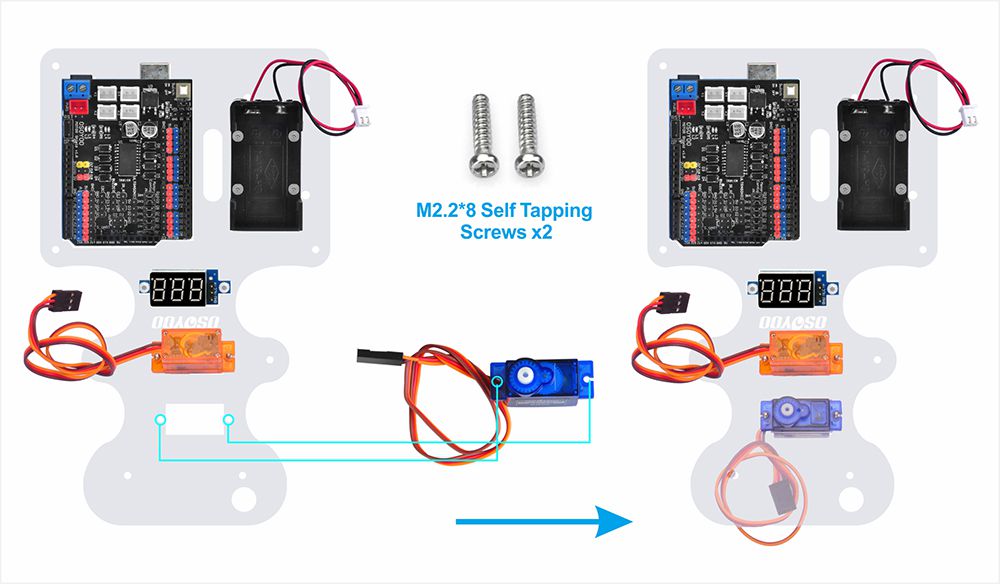
16. Installare il servomotore MG90S (arancione) sul telaio superiore dell’auto dall’alto verso il basso con viti autofilettanti 2pcs M2.2 * 8 come segue:
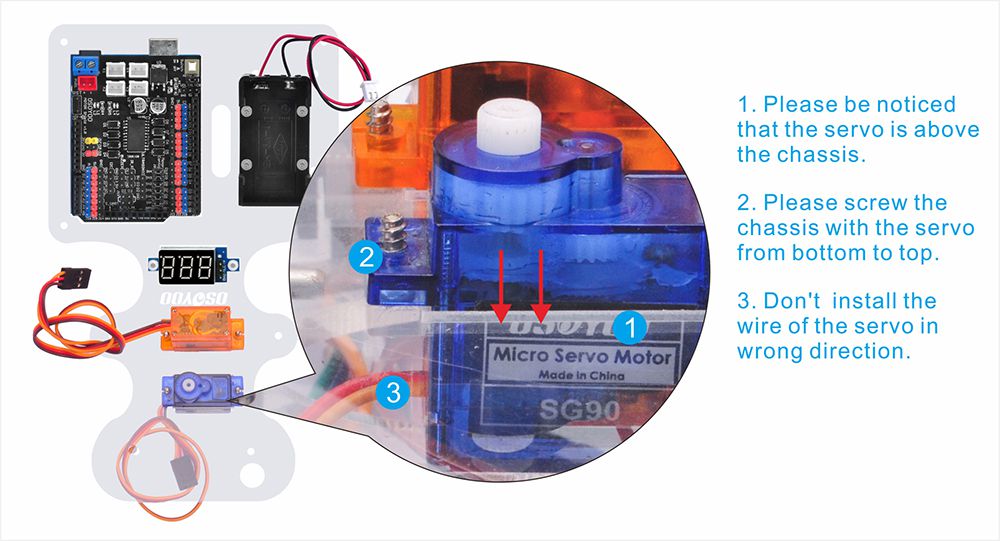
17. Installare il servomotore (blu) sul telaio superiore dell’auto dal basso verso l’alto con viti autofilettanti M2.2 * 8 da 2 pezzi come segue
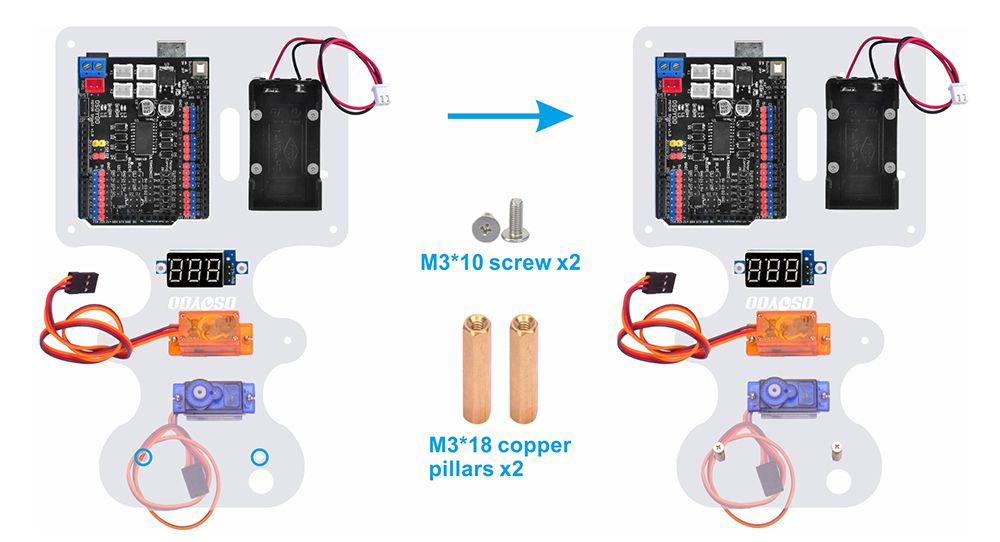
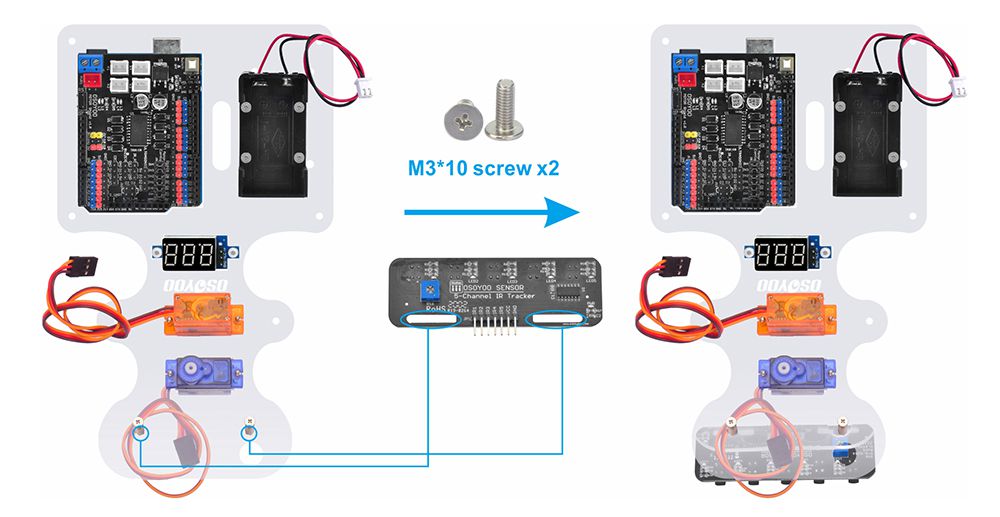
18. Installare 2pcs M3 * 18 pilastri in rame sotto il telaio superiore dell’auto con viti 2pcs M3 * 10 come segue
19. Installare il modulo sensore di tracciamento sotto i pilastri di rame M3 * 18 con viti M3 * 10 da 2 pezzi come segue
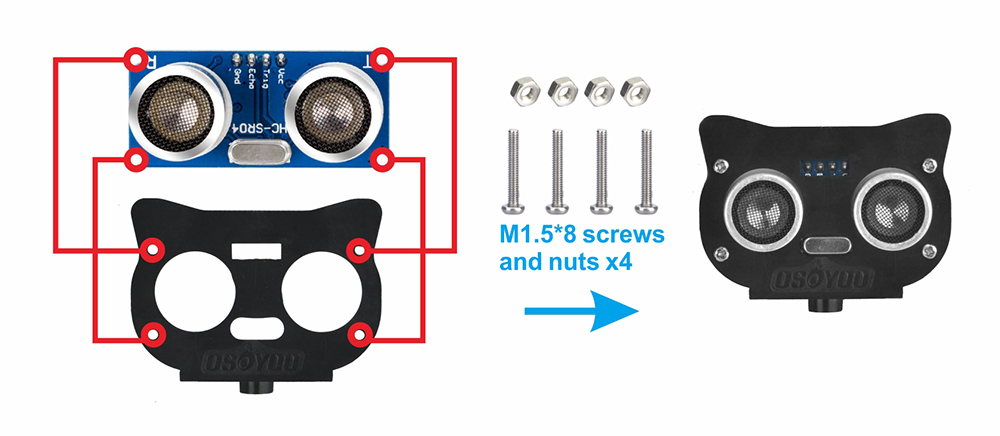
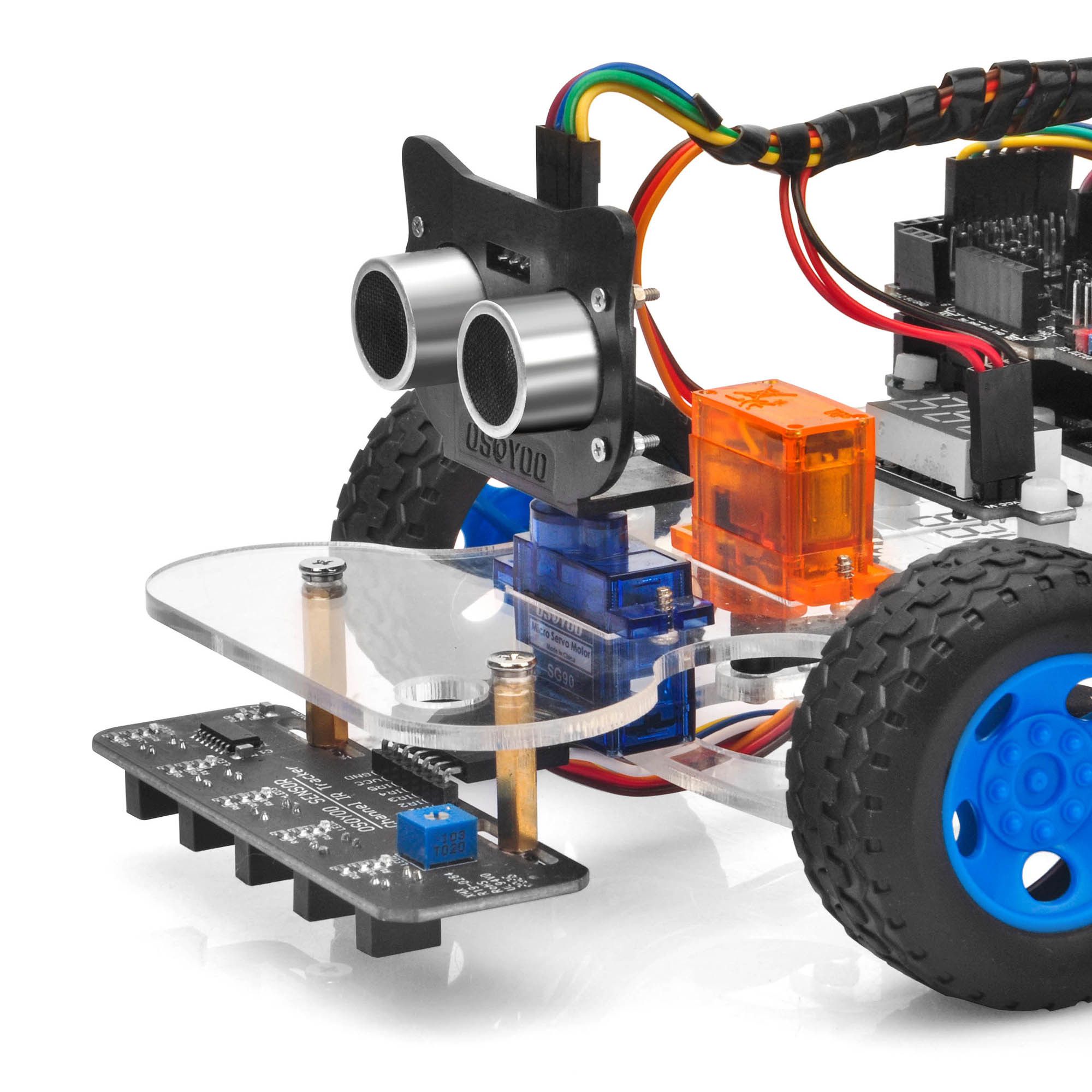
20. Installare il modulo a ultrasuoni per montare il supporto con vite M1.5*8 da 4 pezzi e dadi M1.5 come segue
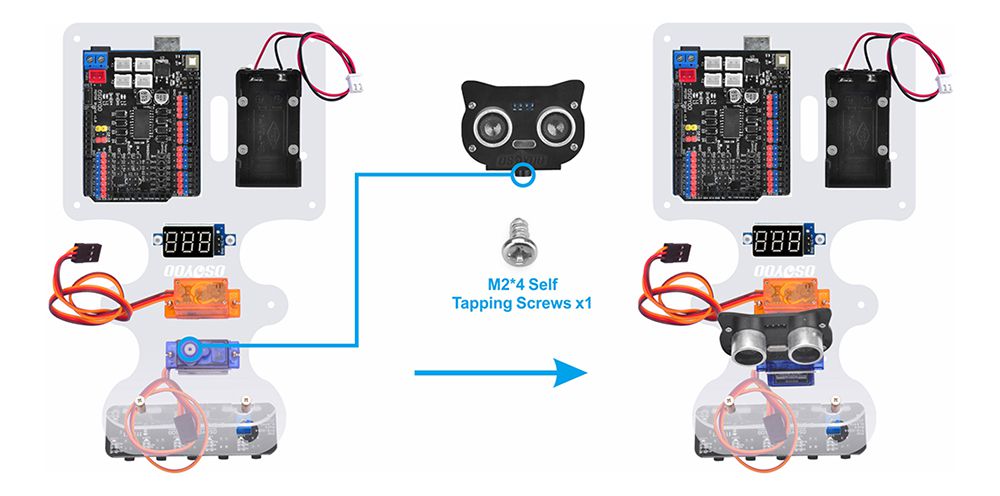
21. Installare il supporto di montaggio per il modulo a ultrasuoni sul servomotore con vite autofilettante M2 * 4 come segue
22. Fissare la coppa dello sterzo sotto il telaio superiore dell’auto con viti autofilettanti 2pcs M3 * 8 come segue(Nota: dopo aver fissato la coppa dello sterzo al telaio superiore, deve essere ancora possibile ruotare facilmente la coppa dello sterzo attorno all’asse della vite):
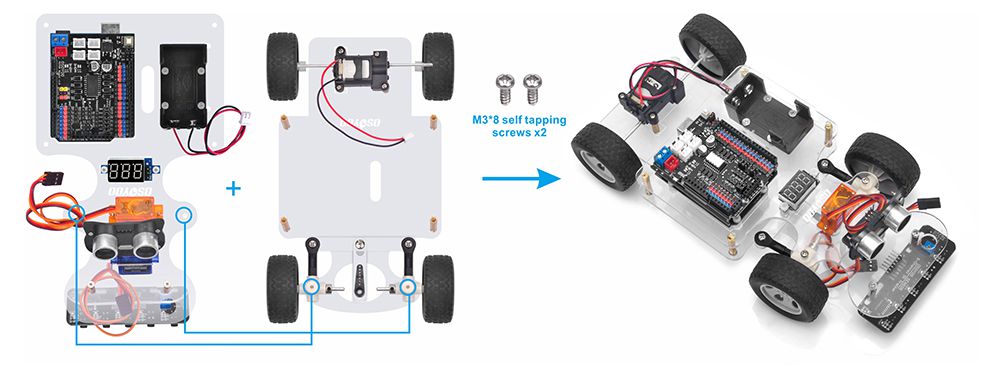
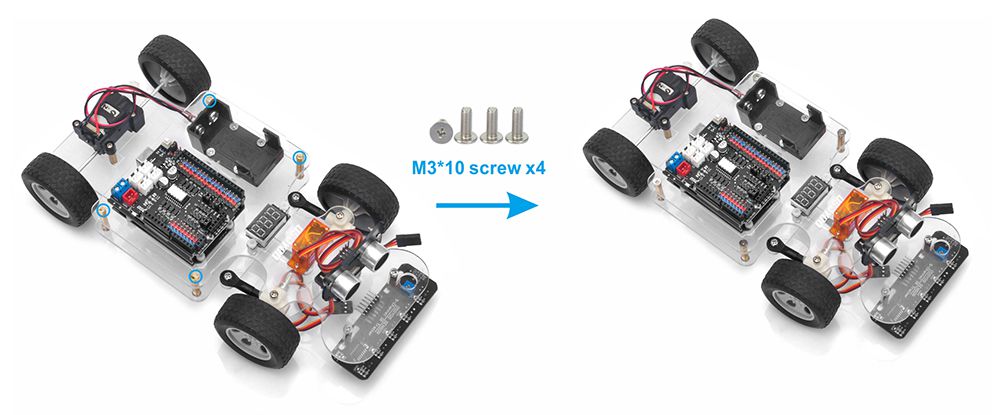
23. Fissare il telaio superiore dell’auto e il telaio inferiore dell’auto con le viti 4pcs M3 * 10 come segue
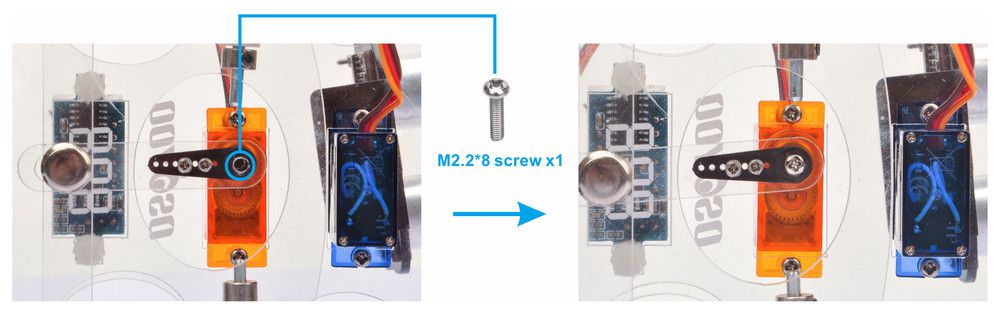
24. Fissare il servomotore MG90S (arancione) sul servo corno nero con viti autofilettanti M2.2*8 da 1pc come segue
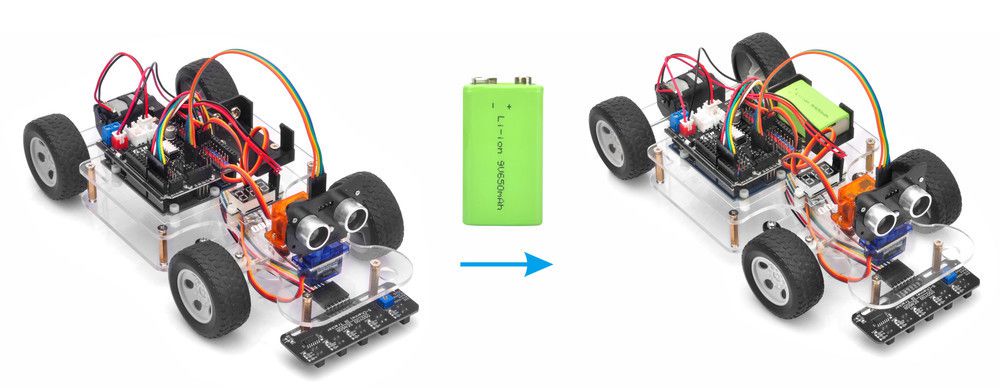
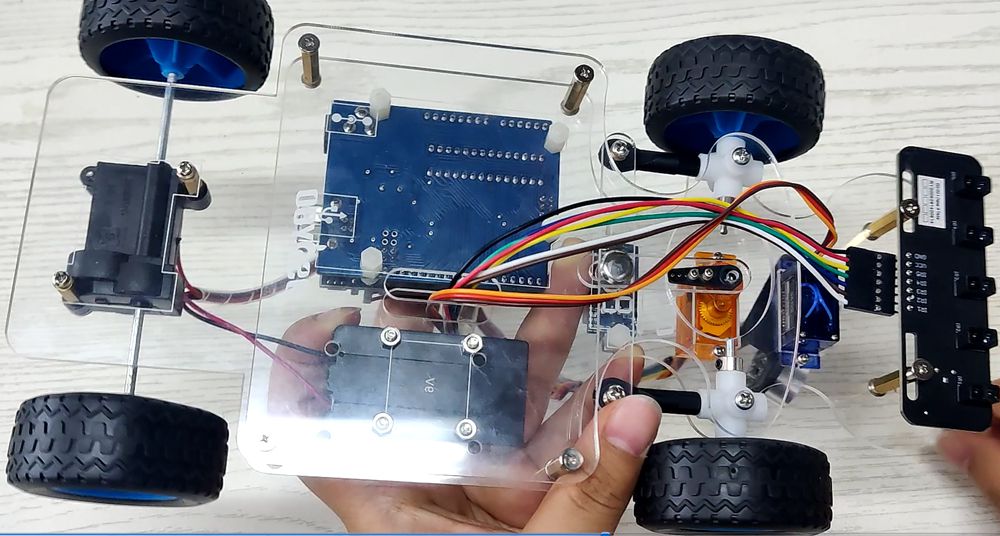
24. Installare la batteria 9V come segue
Connessione
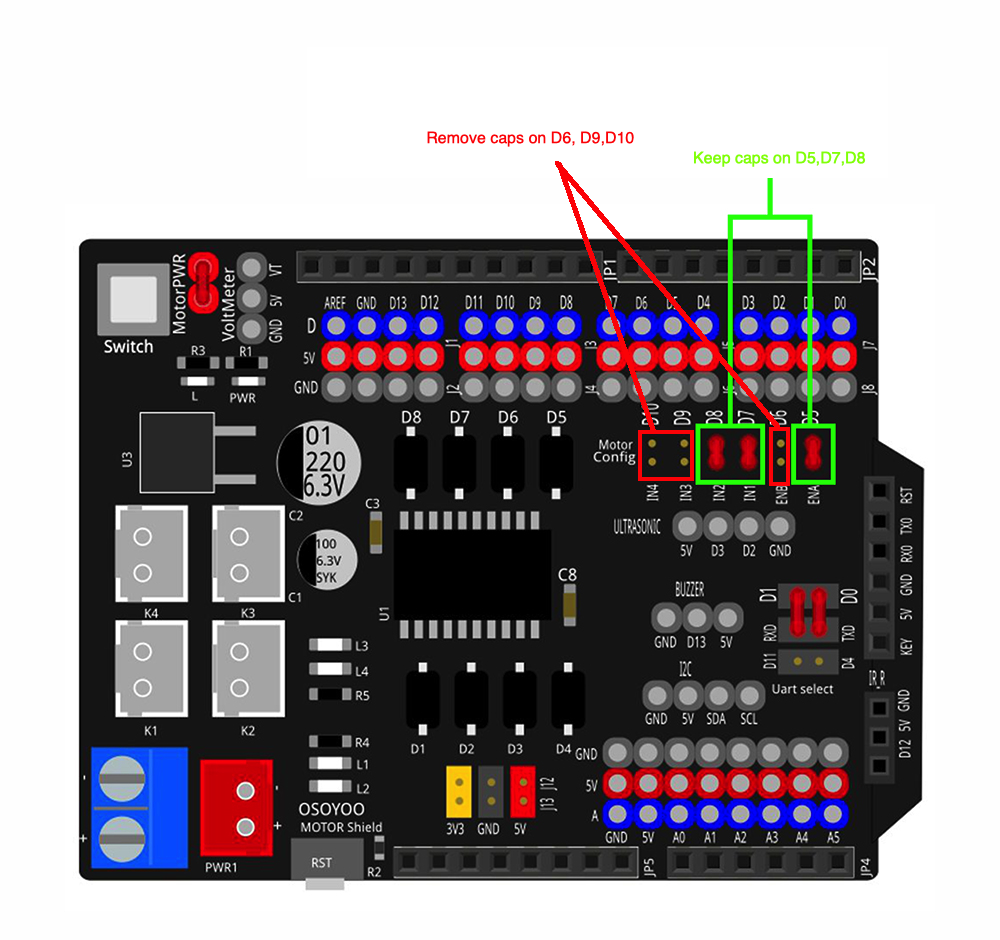
1) Rimuovere i tappi dei ponticelli su ENB-D6, IN3-D9, IN4-D10
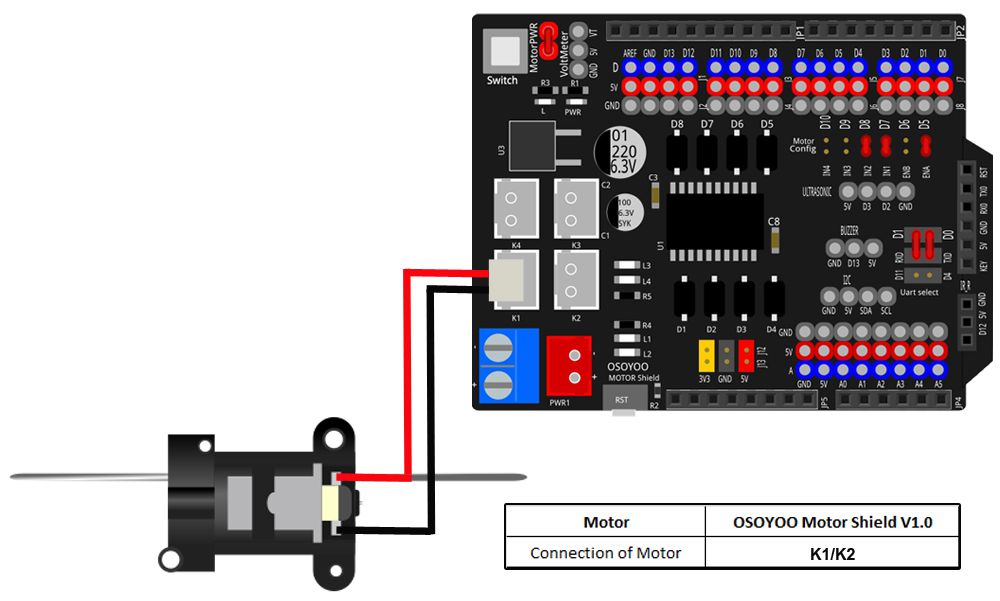
2) Collegare il motore a K1 o K2 di OSOYOO Motor Shield:
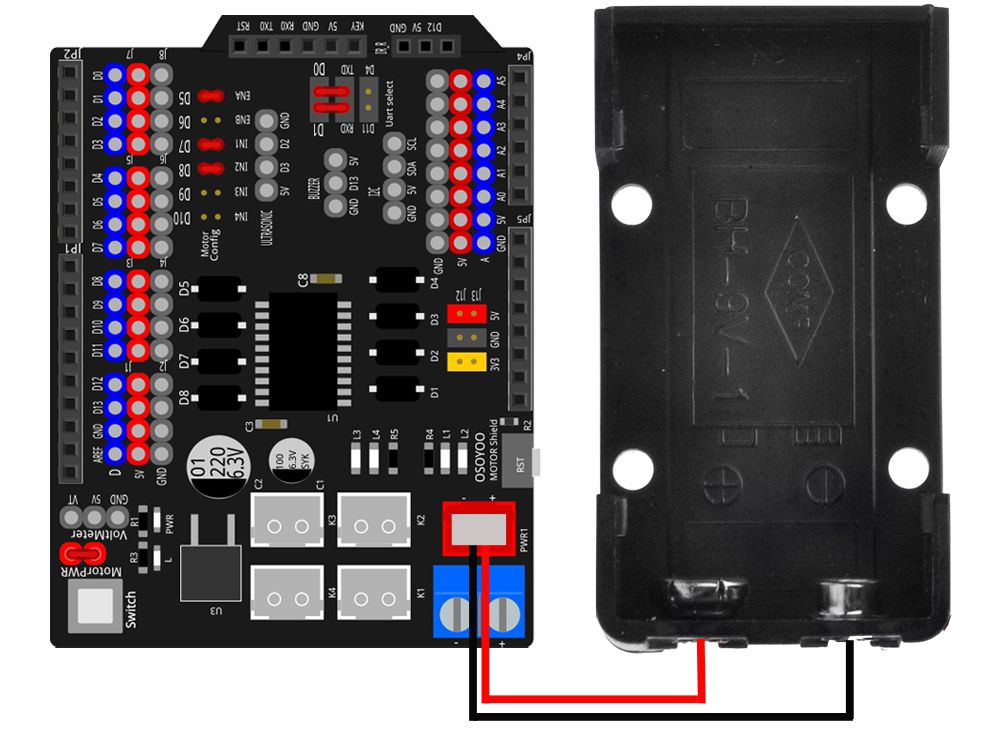
3) Collegare la scatola della batteria a OSOYOO Motor Shield come segue:
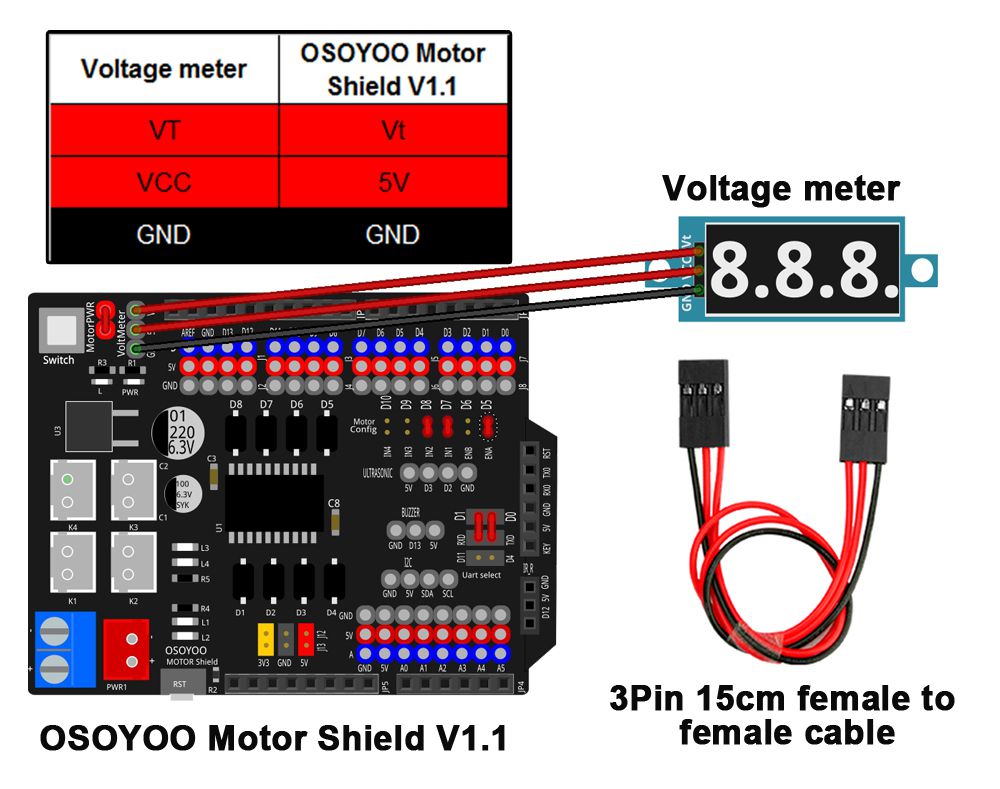
4) Collegare il misuratore di tensione alla protezione motore OSOYOO come segue:
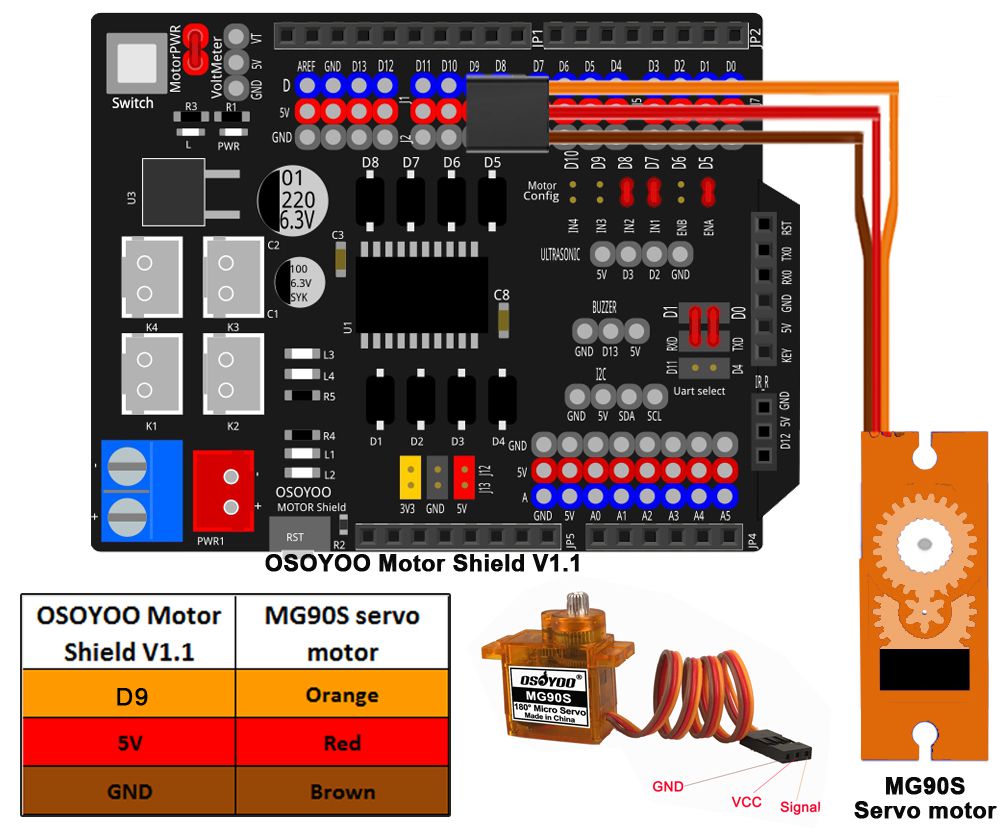
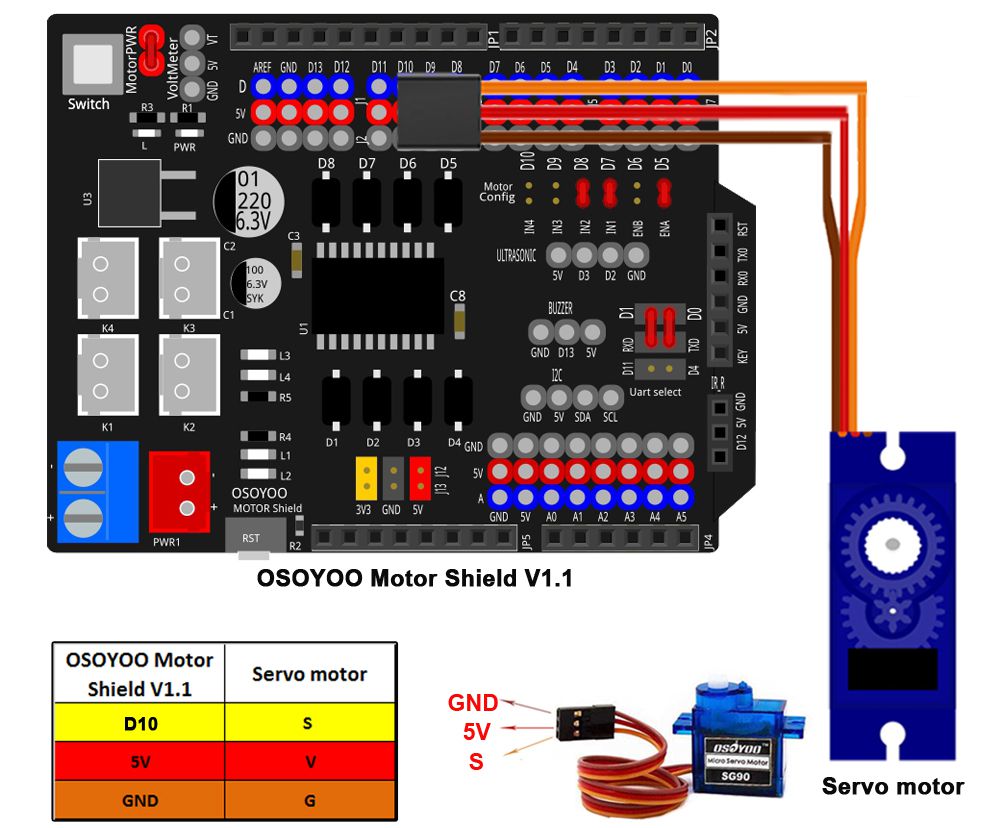
5) Collegare il servo motore MG90S (arancione) a D9 di OSOYOO Motor Shield come segue:
6) Collegare il servomotore (blu) a D10 di OSOYOO Motor Shield come segue:
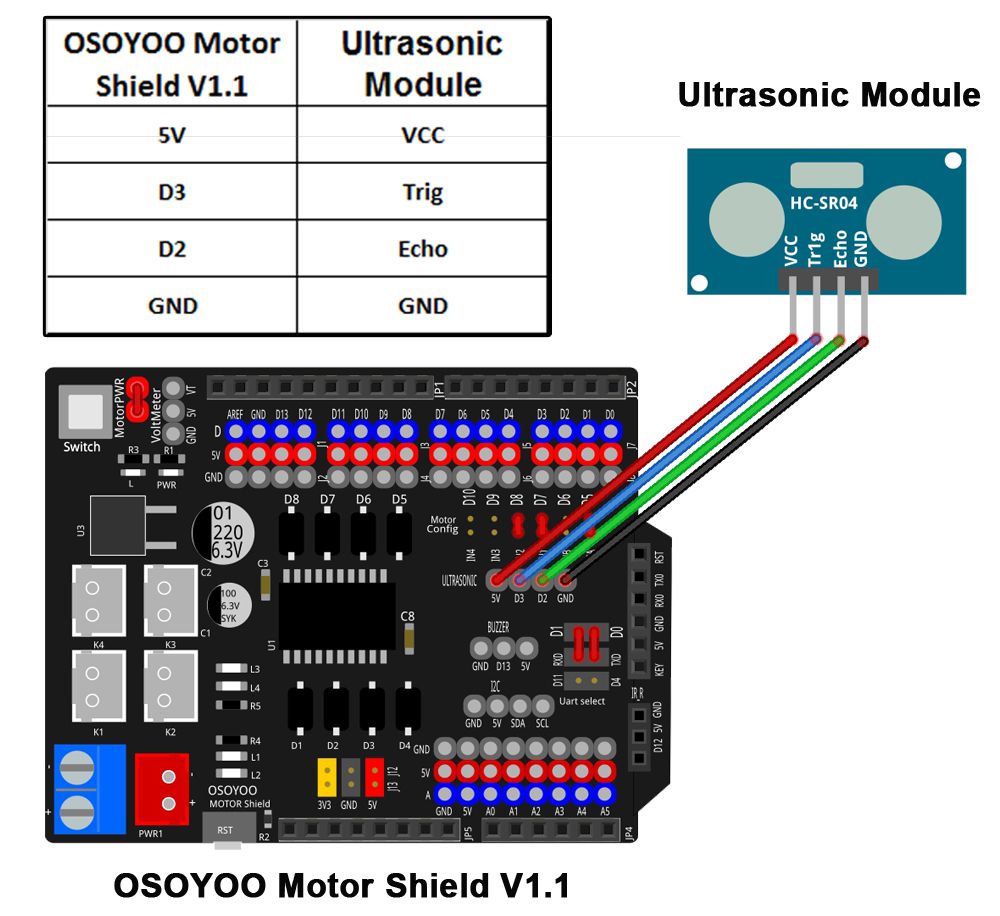
7) Collegare il sensore ad ultrasuoni a OSOYOO Motor Shield come segue:
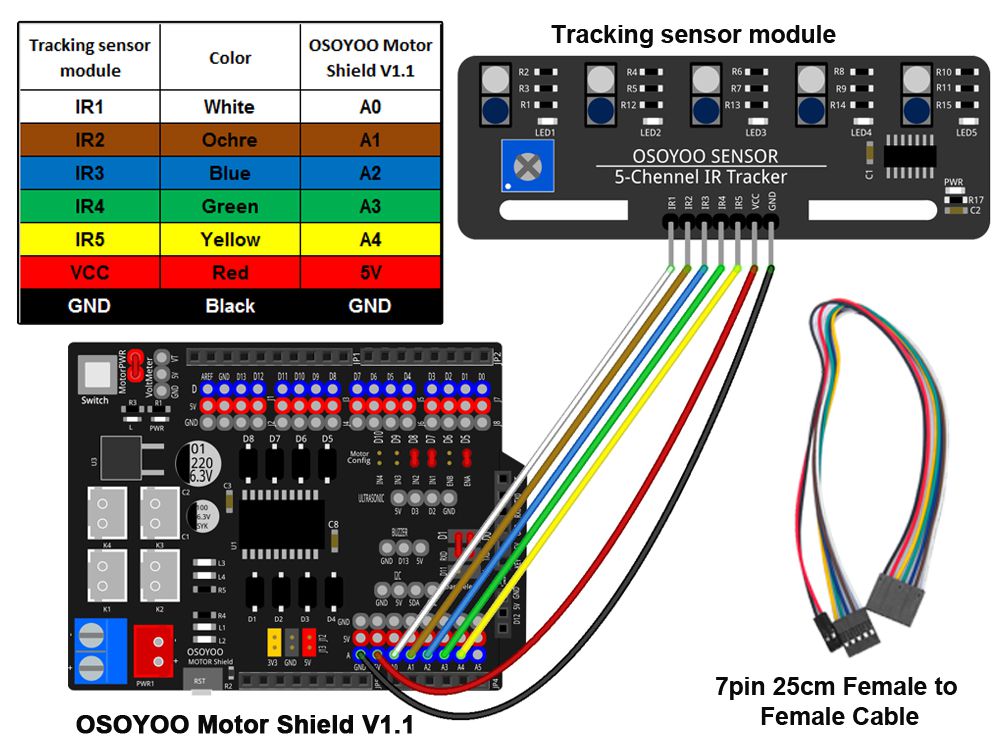
8) Collegare il modulo sensore di tracciamento a OSOYOO Motor Shield come segue:
Ora l’installazione dell’hardware è quasi terminata. Prima di installare la batteria nella confezione, dobbiamo prima caricare il codice di esempio in Arduino.
Installa l’ultimo IDE Arduino (se hai una versione dell’IDE Arduino successiva alla 1.1.16, salta questo passaggio). Scarica Arduino IDE da https://www.arduino.cc/en/software, quindi installa il software.
2. Installare un’utilità zip per decomprimere il file di codice, ad esempio 7 zip
Allineamento servo sterzo
Prima di eseguire il codice di sketch di esempio, verificare innanzitutto la direzione del servosterzo.
Ora è possibile scaricare e installare il file di sketch di prova servo della lezione 1 (steering.ino)
Passo 2. Decomprimi questo file, vedrai una cartella denominata servo, inserisci questa cartella, troverai un file steering.ino.
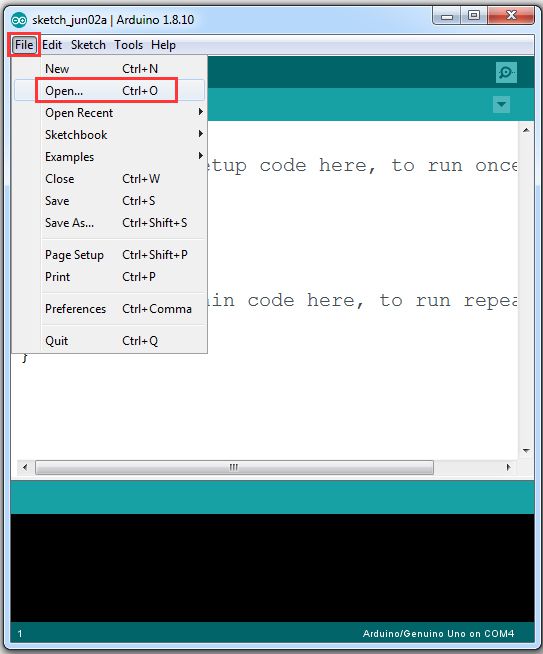
Passo 3. Collegare la scheda UNO R3 al PC con cavo USB, aprire Arduino IDE → fare clic su file → fare clic su Apri → scegliere il codice “steering.ino” nella cartella dello sterzo, caricare il codice nella scheda base OSOYOO per Arduino
Avviso: spegnere la batteria o scollegare l’alimentatore quando si carica il codice sketch sulla scheda base OSOYOO per Arduino.
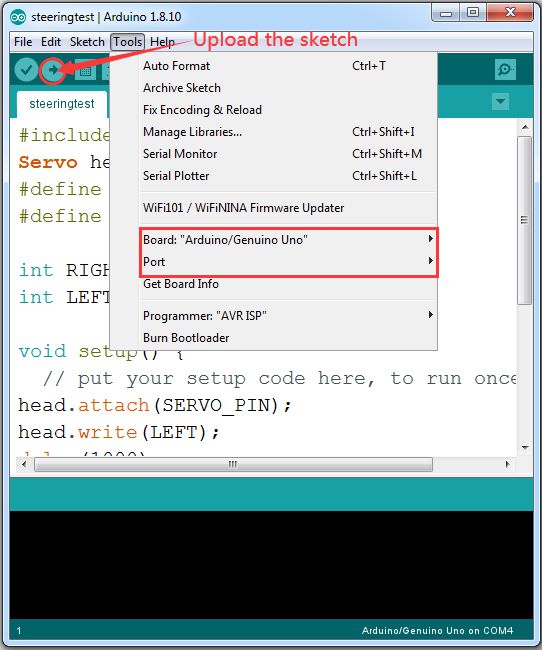
Passo 4. Scegli la scheda / porta corrispondente per il tuo progetto, carica lo schizzo sulla scheda.
Passo 5. Se il servosterzo non è rivolto verso la direzione anteriore centrale, sono disponibili due opzioni: Opzione 1) Utilizzare un cacciavite per rilasciare il braccio dello sterzo dal servo, riallineare manualmente la direzione della ruota, quindi fissare nuovamente il braccio sul servo.
Opzione 2) È possibile modificare il valore predefinito della riga 4
#define FRONT 90
Se i tuoi volanti tendono a sinistra, aumenta il valore da 90 a 95.100.105 …
Se i tuoi volanti tendono a destra, diminuisci il valore da 90 a 85,80,75 …
Esegui di nuovo lo schizzo fino a quando i volanti sono finalmente rivolti verso la parte anteriore.
Quindi annotare il valore FRONT, useremo questo valore per modificare il codice di sketch della lezione2,3,4,5,6 e rendere il servosterzo sempre rivolto verso l’anteriore al valore FRONT predefinito.
Je suis bloqué sur la leçon 2. La leçon 1 fonctionne très bien. Le programme est bien téléchargé de la leçon 2 mais la voiture sur le sol n’avance pas alors que lorsque je la tiens dans la main, les roues tournent normalement et rapidement.
J’ai l’impression que le moteur manque de puissance. Pourriez-vous m’aider ?
1)please double check if the battery is enough. If battery lower than 8V, please recharge the battery or buy a new 9V battery
2)please make sure very parts is not suck, especially in front steering structure.


































Bonjour,
Je suis bloqué sur la leçon 2. La leçon 1 fonctionne très bien. Le programme est bien téléchargé de la leçon 2 mais la voiture sur le sol n’avance pas alors que lorsque je la tiens dans la main, les roues tournent normalement et rapidement.
J’ai l’impression que le moteur manque de puissance. Pourriez-vous m’aider ?
Cordialement,
Noah
1)please double check if the battery is enough. If battery lower than 8V, please recharge the battery or buy a new 9V battery
2)please make sure very parts is not suck, especially in front steering structure.