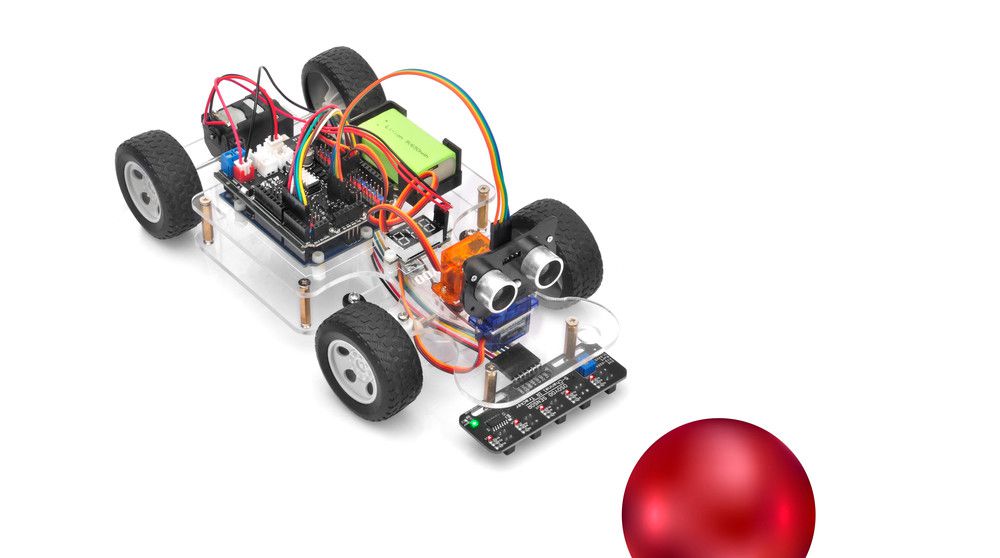
In questo tutorial, useremo il modulo a ultrasuoni per “vedere” l’ostacolo e misurare la distanza. Se la distanza è inferiore a un valore di soglia predefinito, l’auto sportiva si girerà automaticamente dall’ostacolo.
Se non completi il telaio dell’auto, rivedi la lezione 1
Passo 1: Scarica la libreria PWMServo da https://osoyoo.com/driver/sg90car/PWMServo.zip, quindi importa la libreria nell’IDE Arduino. Se hai completato la lezione 2, salta questo passaggio. Passo 2: Scarica il codice di esempio della lezione 4, decomprimi il file zip di download sg90car-lesson4.zip, vedrai una cartella chiamata sg90car-lesson4. Passo 3: Collegare la scheda UNO R3 al PC con cavo USB, aprire Arduino IDE → fare clic sul file → fare clic su Apri → scegliere il codice “sg90car-lesson4.ino” nella cartella sg90car-lesson4, caricare il codice nella scheda base OSOYOO per Arduino. Avviso: spegnere la batteria o scollegare l’alimentatore quando si carica il codice sketch sulla scheda base OSOYOO per Arduino.
Passaggio 4: Modificare il valore predefinito 90 nella riga 19 come valore FRONT nella lezione 1. Se allineate manualmente la direzione della ruota come opzione 1 nel passaggio 5 della lezione 1, saltate questo passaggio.
#define FRONT 90 //degree when steering facing straight forward
Passaggio 5: Scegli la scheda / porta corrispondente per il tuo progetto, carica lo schizzo sulla scheda.
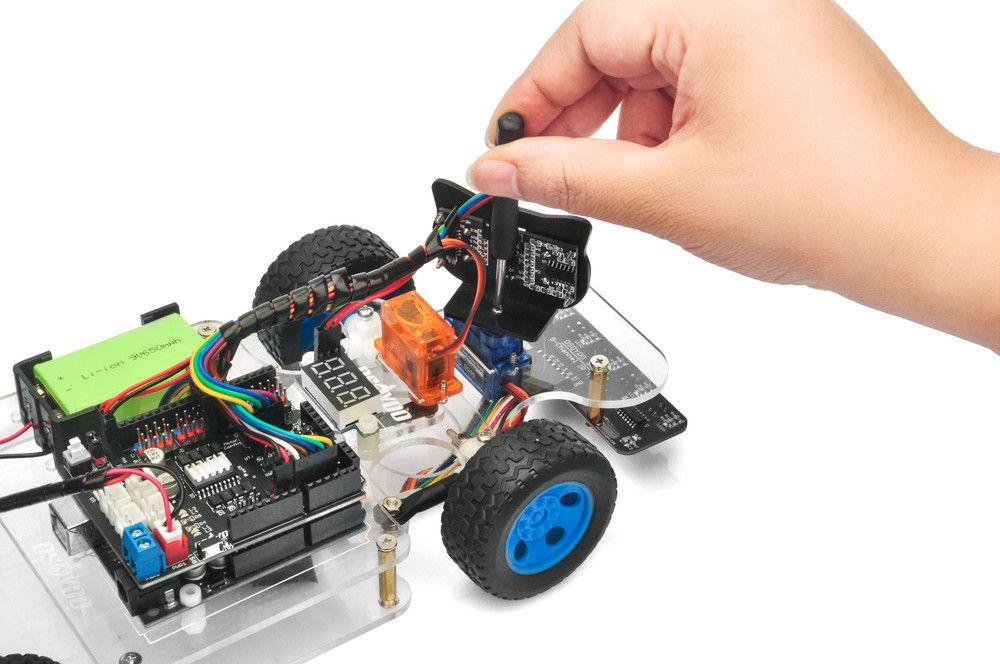
Passaggio 6: Allineamento iniziale della direzione iniziale del servo sensore a ultrasuoni
Dopo l’accensione dell’auto, il sensore a ultrasuoni si muoverà e infine si fermerà in una direzione per 2 secondi. Durante questi primi 2 secondi, è necessario assicurarsi che il sensore a ultrasuoni (due occhi) sia rivolto in avanti. Se non è semplice, è necessario spegnere immediatamente l’auto e rimuovere il sensore dal servo, reinstallarlo e renderlo rivolto in direzione diretta come nell’immagine seguente. In caso contrario, il programma di prevenzione degli ostacoli non funzionerà correttamente.
Collaudo finale
1. Scollegare la scheda di base OSOYOO per Arduino dal PC e confermare che l’interruttore di alimentazione della OSOYOO Motor Shield sia spento, quindi inserire una batteria da 9 V nella scatola della batteria. (Nota: assicurarsi che la direzione polare sia corretta, altrimenti può distruggere il dispositivo e causare pericolo di incendio).
2. Metti l’auto a terra e accendi l’interruttore di OSOYOO Motor Shield. Se non viene rilevato alcun ostacolo, l’auto andrà avanti. Se vengono rilevati ostacoli, l’auto si fermerà, il modulo a ultrasuoni girerà da destra a sinistra per rilevare l’ostacolo circostante. L’auto robot deciderà di girare a sinistra, a destra o indietro in base ai dati del sensore di ostacolo e al nostro algoritmo di evita mento degli ostacoli.
A volte la tua auto potrebbe avere una collisione e cambiare la posizione del sensore a ultrasuoni, devi ricordarti di eseguire nuovamente l’allineamento della direzione del sensore come da passaggio 6. Nota: se l’auto non si muove secondo il risultato sopra menzionato, è necessario controllare la connessione del filo del sensore di tracciamento, la tensione della batteria (deve essere superiore a 7,2 v).
4. Se vuoi cambiare l’angelo di destra o di sinistra, modifica le righe da 20 a 23 del codice e carica di nuovo lo schizzo: (Nota: l’angelo non può essere impostato più di 35)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
int RIGHT=FRONT+20;
int LEFT=FRONT-20;
5. Se si desidera modificare la velocità dell’auto, si prega di rivedere il seguente codice dello schizzo (Nota: il valore massimo è 255)
I have a problem with my ultrasonic sensor not facing straight forward like it used to. I tried to reinstall it and it did not work… I need help with this. I need a solution. I tried changing codes, and redoing the code all over again but did not work. I’m new to this so any answer to my problem is greatly appreciated. Thank you.












I have a problem with my ultrasonic sensor not facing straight forward like it used to. I tried to reinstall it and it did not work… I need help with this. I need a solution. I tried changing codes, and redoing the code all over again but did not work. I’m new to this so any answer to my problem is greatly appreciated. Thank you.
-TheNewBeggining