In questa lezione, useremo Mobile per controllare la nostra auto robot e fare una guida imitazione. Poiché è una guida simulata, useremo un volante virtuale e un cambio nella nostra APP per imitare le loro controparti nell’auto reale.
Devi completare la lezione 2 Movimento di base prima di continuare con questa lezione.
Se non completi il telaio dell’auto, rivedi la lezione 1

Parti e dispositivi
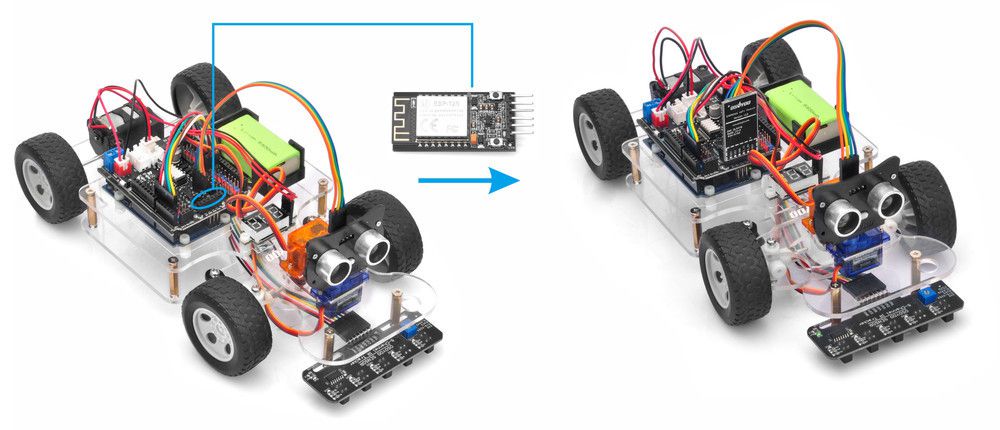
Connessione via cavo
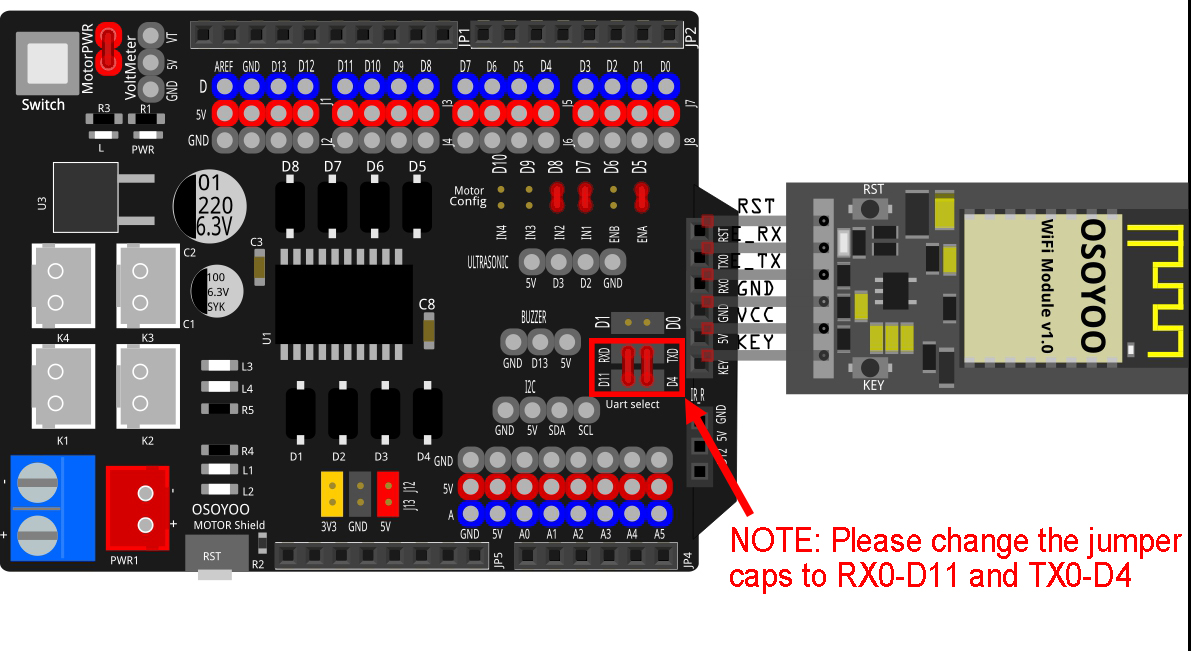
Il modulo Wi-Fi ESP8266 deve essere inserito nello slot della porta seriale morbida e due tappi ponticelli Wi-Fi sono installati come illustrato di seguito.
Rimuovere Jumper su ENB, IN3, IN4
| .PART |
Scudo motore |
| Ponticello IN1 |
D7 |
| Ponticello IN2 |
D8 |
| Maglione ENA |
D5 |
| Servo sterzante |
D9 |
| Cavo motore posteriore |
K1 o K2 |
| E_TX ponticello |
D4 |
| E_RX ponticello |
D11 |
Installazione del software
Passo 1)
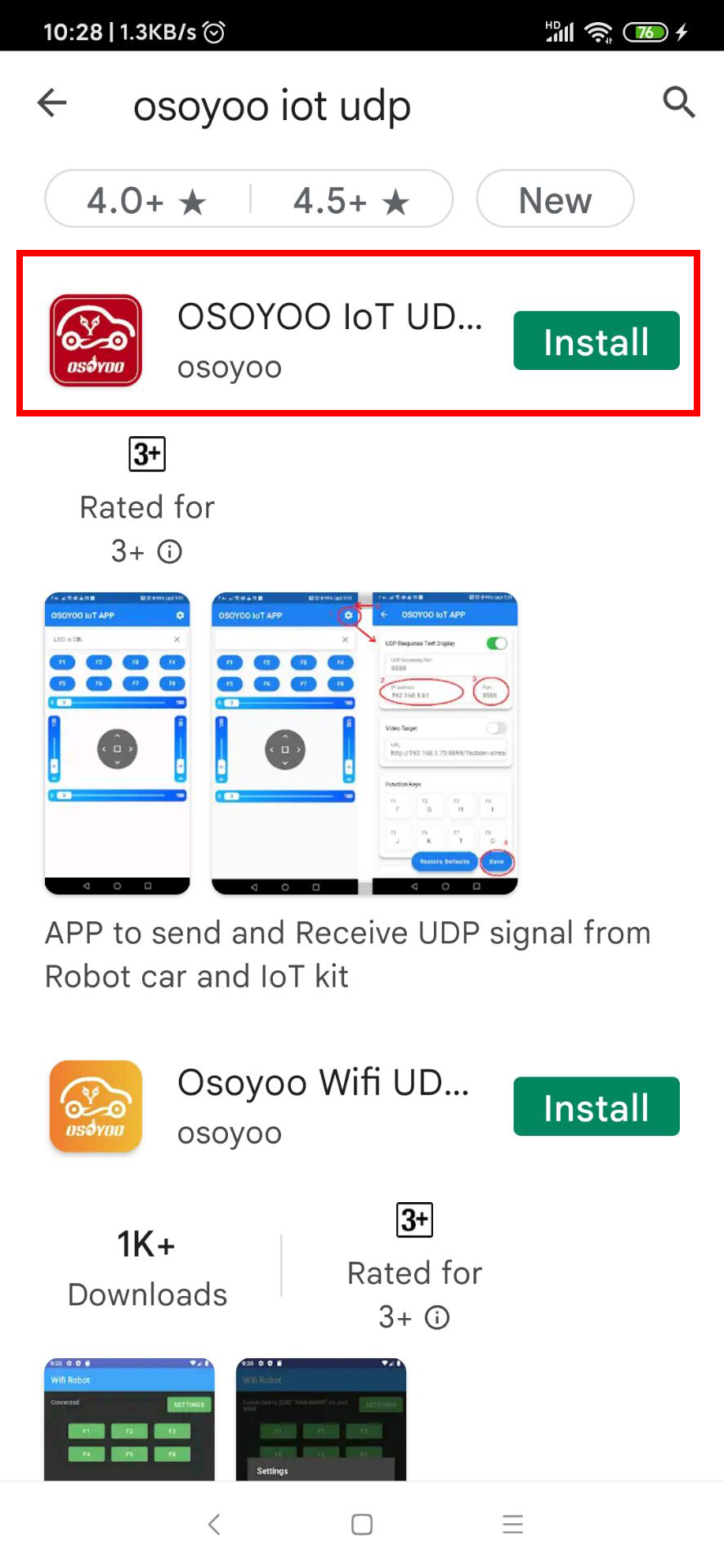
Scarica OSOYOO Wi-Fi UDP Robot Car control APP In Google Play o Apple Store, cerca le parole chiave “OSOYOO IoT UDP Robot Car”, troverai un’icona rossa APP come segue ( Nota: se non riuscite a trovare questa APP in Google Play, potete scaricare direttamente l’APP dal seguente link: https://osoyoo.com/driver/udp-app.apk):
Passo 2) Scarica la libreria PWMServo da https://osoyoo.com/driver/sg90car/PWMServo.zip se non hai installato la libreria nella lezione 2.
Inoltre, si prega di scaricare il file zip della libreria WifiESP-Master da https://osoyoo.com/driver/WiFiEsp-master.zip
Ora apri Arduino IDE →fai clic su Sketch →Includi libreria →Aggiungi .ZIP libreria, quindi carica sopra due file zip nella scheda di base OSOYOO per Arduino.
Passo 3) Installazione del codice di schizzo: l’auto può funzionare in due modalità Wi-Fi:
modalità STA e modalità AP. Gli schizzi per queste due modalità sono diversi. Spieghiamo queste due modalità una per una
A) Modalità
STA In modalità STA, Robot Car sarà un dispositivo cliente del router LAN. È necessario salvare il nome SSID e la password del router LAN in sketch.
Una volta eseguito lo sketch, il servizio DHCP del router assegnerà un indirizzo IP all’auto robot e l’APP utilizzerà questo indirizzo IP per accedere alla tua auto.
1) Si prega di scaricare il codice di schizzo in modalità STA da https://osoyoo.com/driver/sg90car/sg90car-lesson5A1.zip. Decomprimi il file, vedrai una cartella “sg90car-lesson5A1”. Apri Arduino IDE → fai clic sul file → fai clic su Apri → scegli il codice “sg90car-lesson5A1.ino” nella cartella sopra, carica il codice nella scheda di base OSOYOO per Arduino

2) È necessario modificare il codice nella riga 65,66
char ssid[] = “***”; // sostituisci *** con il tuo router wifi SSID
char pass[] = “***”; // sostituisci *** la tua password wifi
3) Si prega di modificare il valore predefinito 90 nella riga 19 come valore FRONT nella lezione 1. Se si allinea la direzione della ruota tramite l’opzione 1 nel passaggio 5, saltare questo passaggio.
#define FRONT 90 //degree when steering facing straight forward
4) Caricare lo sketch su OSOYOO Basic Board per Arduino. Infine, fai clic sulla finestra Monitor seriale nell’angolo in alto a destra dell’IDE Arduino, vedrai il seguente risultato:

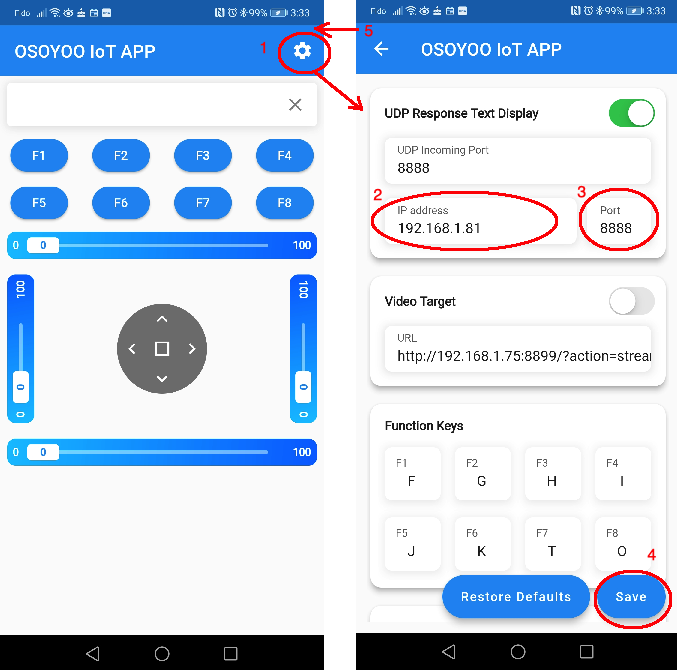
5) In questa modalità, vedrai un indirizzo IP, che è il nostro indirizzo IP LAN assegnato dal mio router. Annotare questo indirizzo IP e fare clic su Impostazioni per impostare l’indirizzo IP del robot e impostare questo indirizzo IP nella sezione Impostazioni APP e Porta su 8888 nelle impostazioni.
Ora la tua auto robot è collegata alla tua LAN, puoi utilizzare il telefono cellulare sotto la stessa LAN per controllare l’auto robot. Se la tua APP è in WAN, devi andare al tuo Pannello di controllo del router, inoltrare la porta 8888 all’indirizzo IP LAN dell’auto robot, quindi puoi utilizzare l’IP del router per controllare l’auto. Questa caratteristica rende la nostra auto robot UN VERO DISPOSITIVO INTERNET OF THING
B) Modalità
AP A volte siamo all’aperto e non abbiamo un router LAN o Wi-Fi. Per controllare l’auto, dobbiamo usare la modalità AP.
Quando si lavora in modalità AP, la nostra auto robot stessa diventerà un Hotspot Wi-Fi. Il nostro telefono cellulare può connettersi a Robot Car come client Wi-Fi. L’indirizzo IP di Robot è fissato come 192.168.4.1 e non è connesso alla WAN.
1) Si prega di scaricare lo schizzo dal seguente link: https://osoyoo.com/driver/sg90car/sg90car-lesson5B1.zip. Decomprimi il file, vedrai una cartella “v3car-lesson5B1”. Apri Arduino IDE → fai clic sul file → fai clic su Apri → scegli il codice “v3car-lesson5B1.ino” nella cartella sopra, carica il codice nella scheda di base OSOYOO per Arduino
2) Apri il tuo monitor seriale Arduino e vedrai un risultato simile alla modalità STA. Nella finestra verrà visualizzato un nuovo SSID Wi-Fi “osoyoo_robot” con indirizzo IP 192.168.4.1. Ciò significa che la tua auto robot ha un nome Hotspot Wi-Fi “osoyoo_robot”, il suo indirizzo IP è 192.168.4.1
3) Collega il tuo cellulare al Hotspot Wi-Fi “osoyoo_robot” e imposta l’indirizzo IP come “192.168.4.1” e la porta su 8888 nella sezione Impostazioni APP
Ora la tua auto robot diventa un Hot Spot Wi-Fi, puoi utilizzare il telefono cellulare per controllare l’auto robot.
Collaudo finale
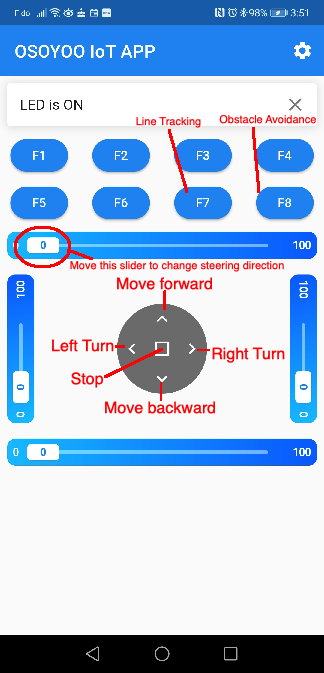
Accendi l’auto. Ora fai clic su Impostazioni per impostare l’indirizzo IP del robot.
A) In modalità STA, è necessario collegare il telefono cellulare allo stesso SSID LAN della propria auto robot e impostare l’indirizzo IP stesso dell’IP del robot mostrato in Arduino Serial Monitor.
B) In modalità AP, è necessario contattare il telefono cellulare per “osoyoo_robot” hot_spot Wi-Fi e impostare l’indirizzo IP come 192.168.4.1
È possibile fare clic sul pulsante ◄ per effettuare la svolta a sinistra (ruotare il volante in senso antiorario), fare clic sul pulsante ► per effettuare la svolta a destra (ruotare il volante in senso orario), se si tiene premuto questi due pulsanti, girerà ad angolo più acuto.
▲ farà avanzare l’auto e ▼ farà muovere l’auto all’indietro.