Benvenuti alla prima lezione di OSOYOO Robot Car per Raspberry Pi!
In questa lezione, introdurremo come installare il framework di OSOYOO Robot Car per Raspberry Pi in primo luogo, quindi ti diremo semplicemente come installare Raspberry Pi OS per Raspberry Pi e come utilizzare la console per controllare Raspberry Pi. Useremo OSOYOO Robot Car per Raspberry Pi per fare alcuni semplici movimenti.
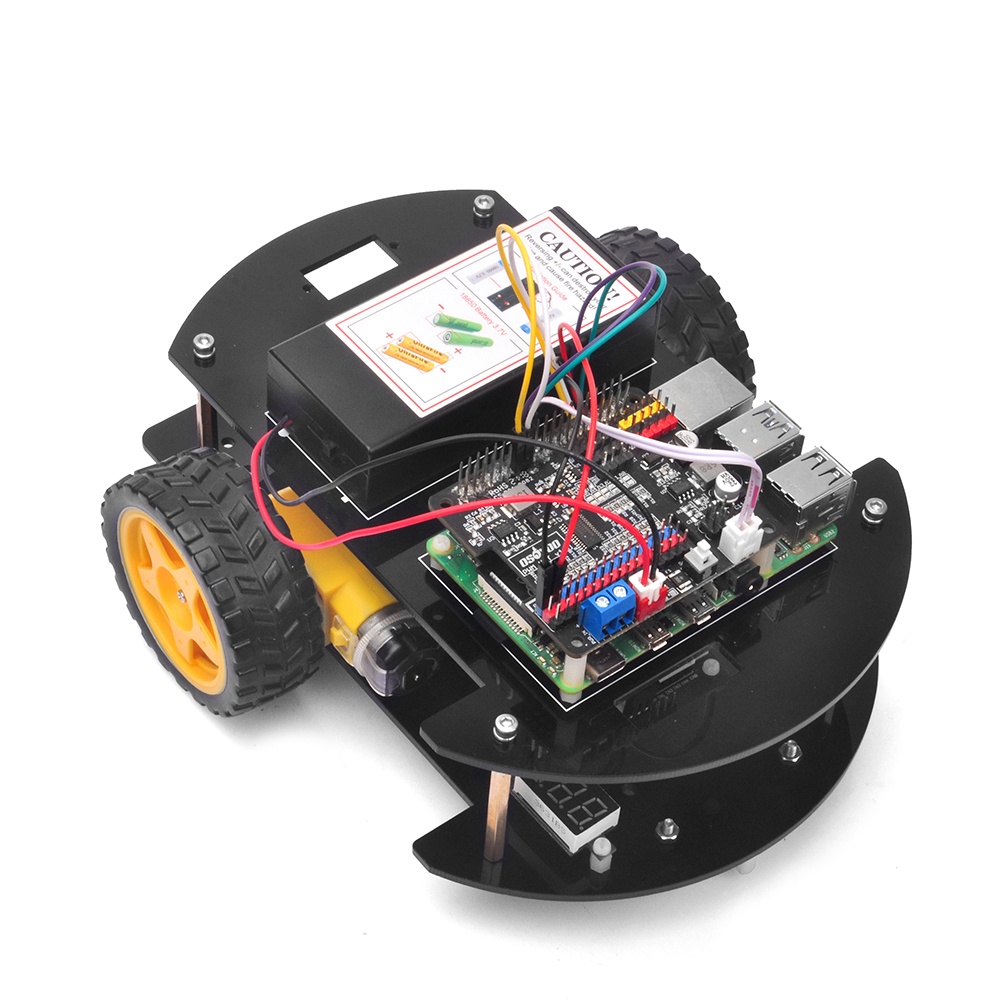
Se hai superato il movimento di prova di questa lezione, significa che Raspberry pi, motori, batteria, scheda modello X, OSOYOO PWM HAT e collegamenti via cavo tra queste parti funzionano tutti bene e puoi passare ad altre lezioni di esempio
Tutte le lezioni si basano sul quadro di questa lezione. Si prega di seguire attentamente questa lezione.
No.
Immagine
Dispositivo
Qty.
Accessoristica
Collegamento
1
Raspberry pi 2/3/4
(non in confezione)
1
M2.5 Vite in plastica x4
M2.5 Dado di plastica x2
M2.5 Pilastro in plastica x4M2.5 * 12 pilastri in plastica x2
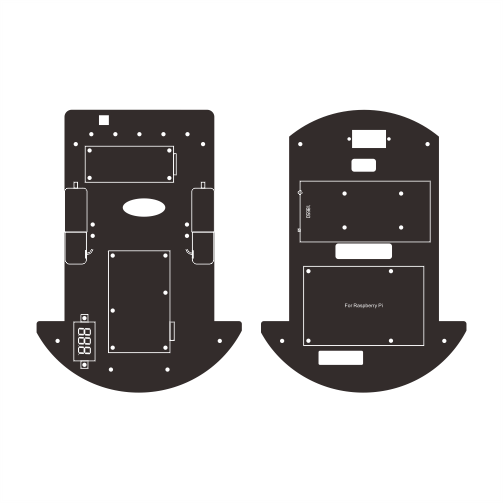
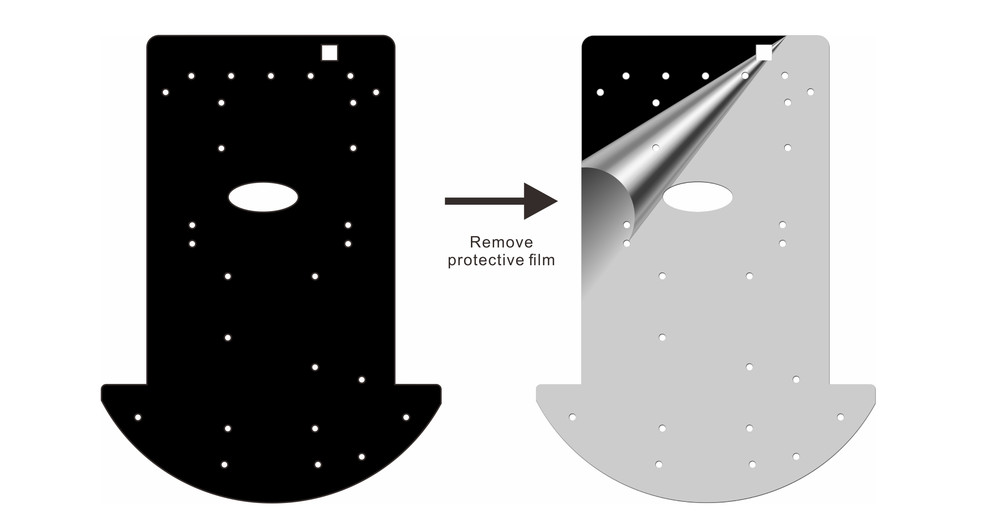
1) Rimuovere la pellicola protettiva sul telaio superiore e inferiore dell’auto (ogni telaio dell’auto ha una pellicola protettiva).
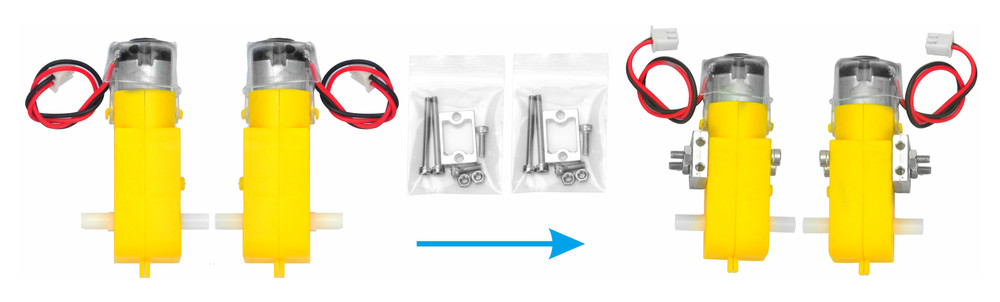
2) Installare 2 motori con supporti per motori in metallo come segue.
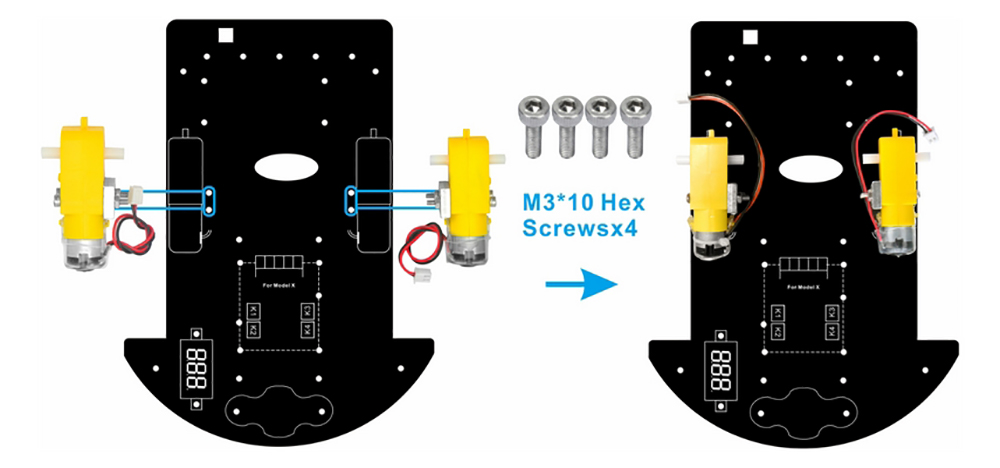
3) Installare 2 motori sul telaio inferiore dell’auto con vite M3 * 10. (Viti in pacchetto portamotore metallico. Si prega di aggiungere rondelle M3 tra viti e telaio se le viti si staccano facilmente.)
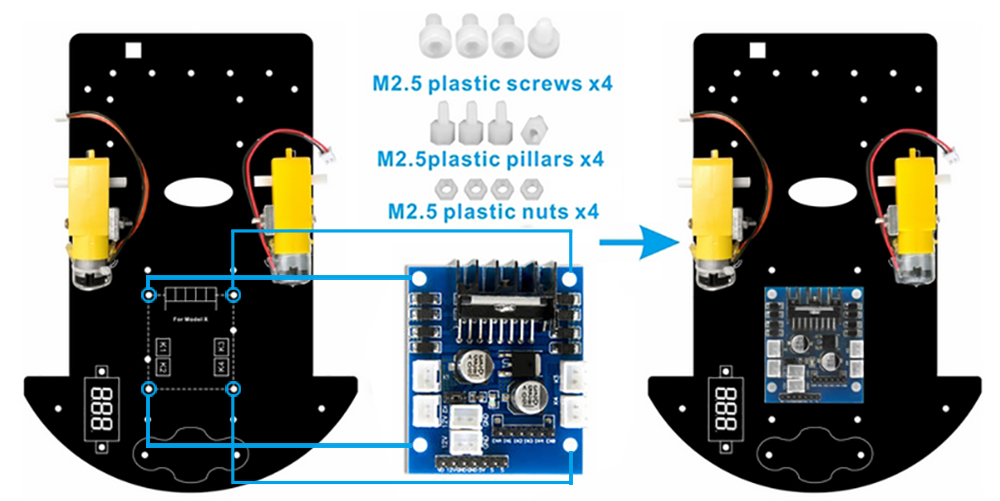
4) Installare il modulo driver motore OSOYOO MODEL X sul telaio inferiore dell’auto con viti in plastica M2.5 da 4 pezzi, pilastri di plastica e dadi di plastica. (Assicurati di installare il modulo driver motore OSOYOO MODEL X nella direzione corretta.)
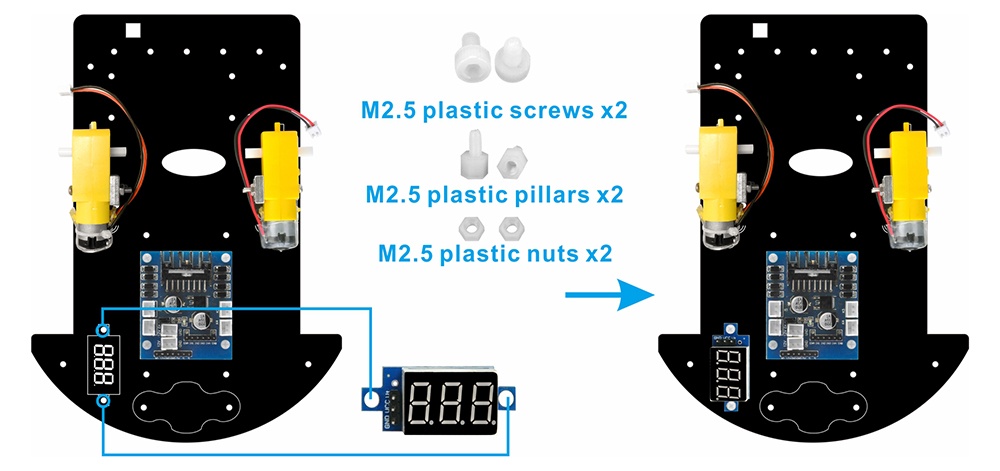
5) Installare il misuratore di tensione sul telaio inferiore dell’auto con viti in plastica M2.5 da 2 pezzi, pilastri di plastica e dadi di plastica.
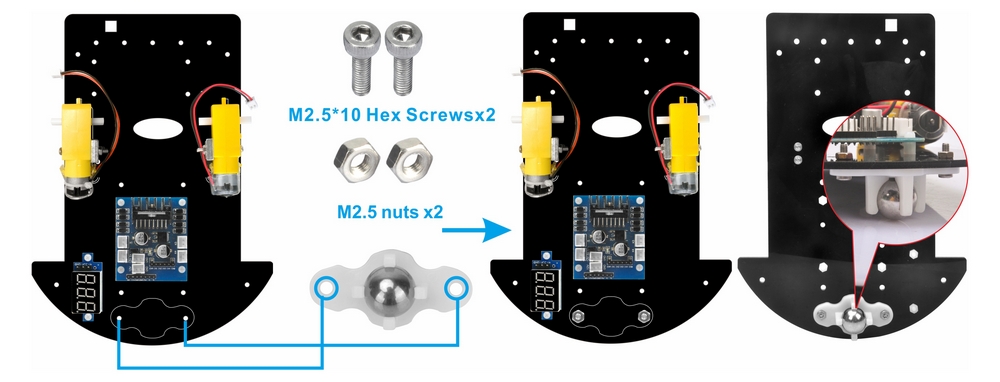
6) Installare la ruota universale sotto il telaio inferiore dell’auto con viti esagonali M3*10 da 2 pezzi e dadi M3.
7) Installare 2 ruote sui motori (se si trovano le ruote installate troppo strettamente per muoversi, è possibile rimuovere le viti sulle ruote)
8) Installare 4pcs pilastri in rame su telaio auto basso con viti esagonali 4pcs M3x10. (Si prega di aggiungere lavaggi M3 tra viti e telaio se le viti si staccano facilmente.)
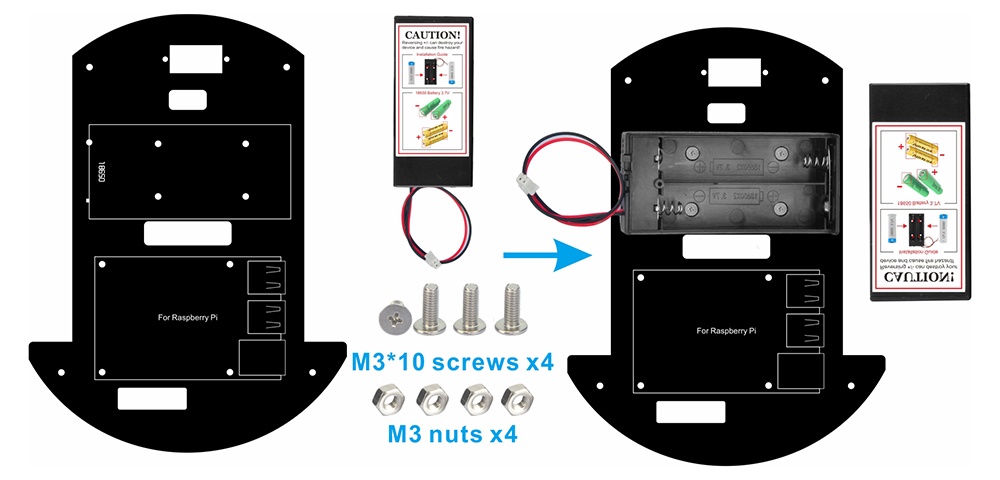
9) Installare la scatola della batteria 18650 sul telaio superiore dell’auto con viti M3*10 4pcs e dadi M3.
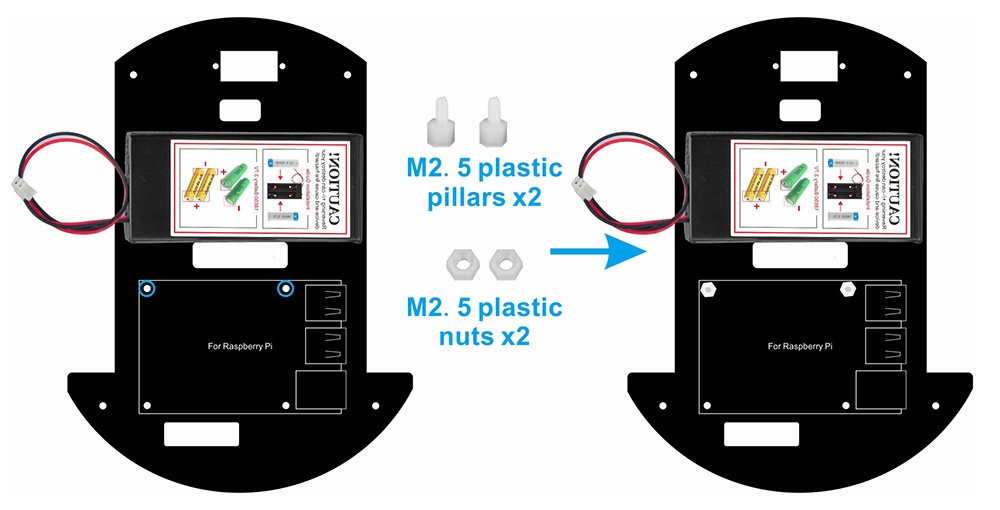
10) Fissare i pilastri di plastica M2.5 2pcs sul telaio superiore come segue:
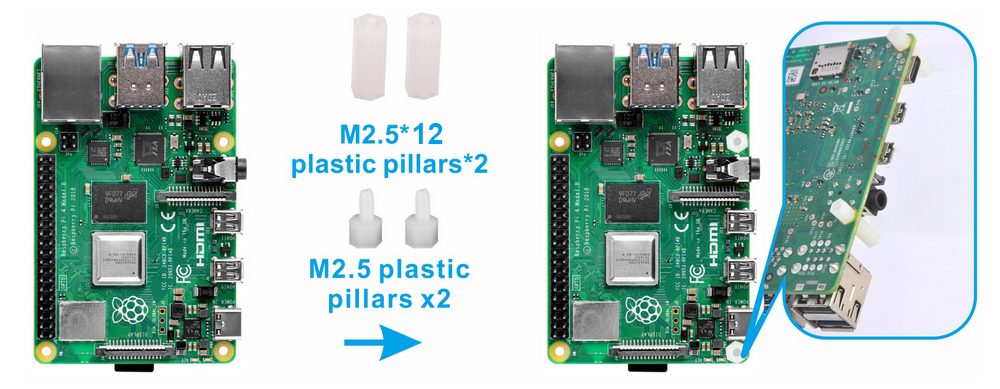
11) Utilizzare la croce del pilastro di plastica M2.5 Raspberry Pi e il pilastro di plastica M2.5 * 12 dal basso verso l’alto come segue
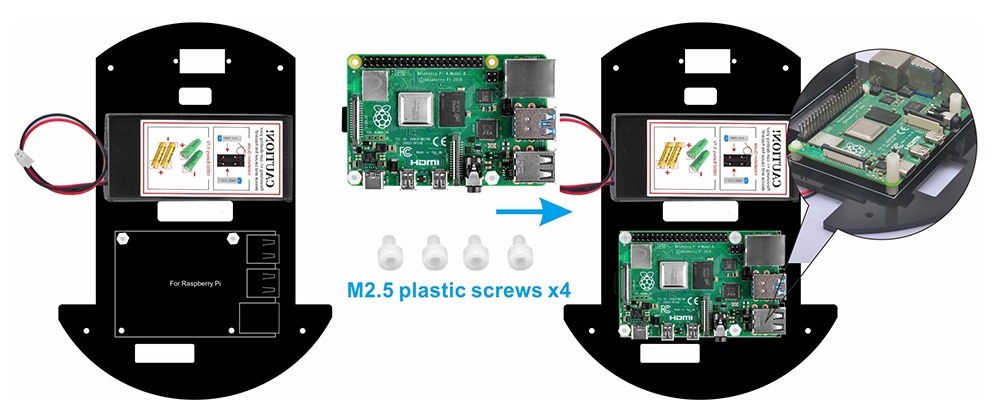
12) Installare viti in plastica M2.5 2pcs sotto il telaio e viti in plastica M2.5 2pcs su Raspberry Pi
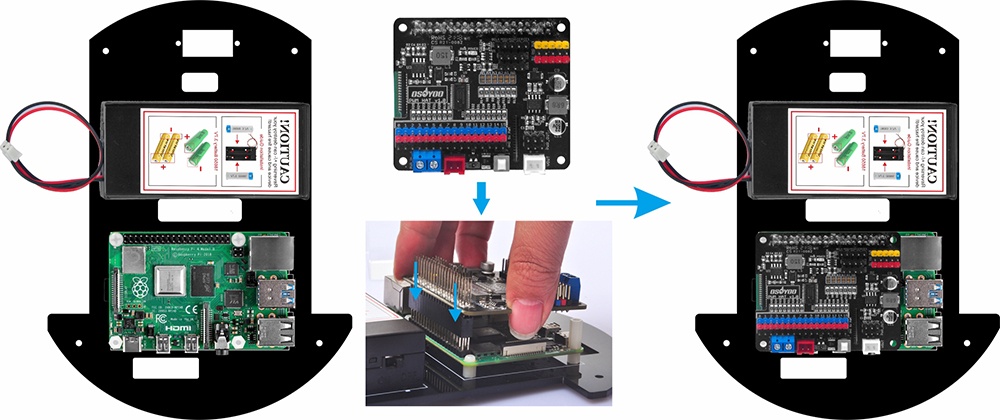
13) Inserire OSOYOO PWM Hat su Raspberry Pi come segue:
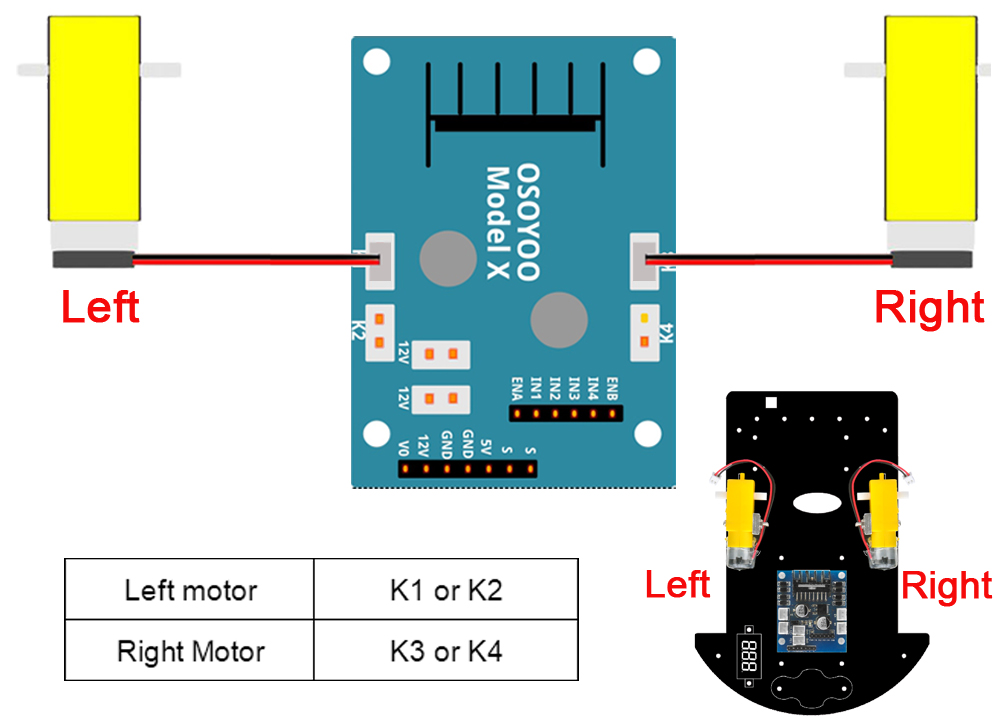
Passo 1: COLLEGARE il motore sinistro alla presa K1 o K2 del modulo driver del motore OSOYOO Model X, il motore destro alla presa K3 o K4 come da grafico seguente:
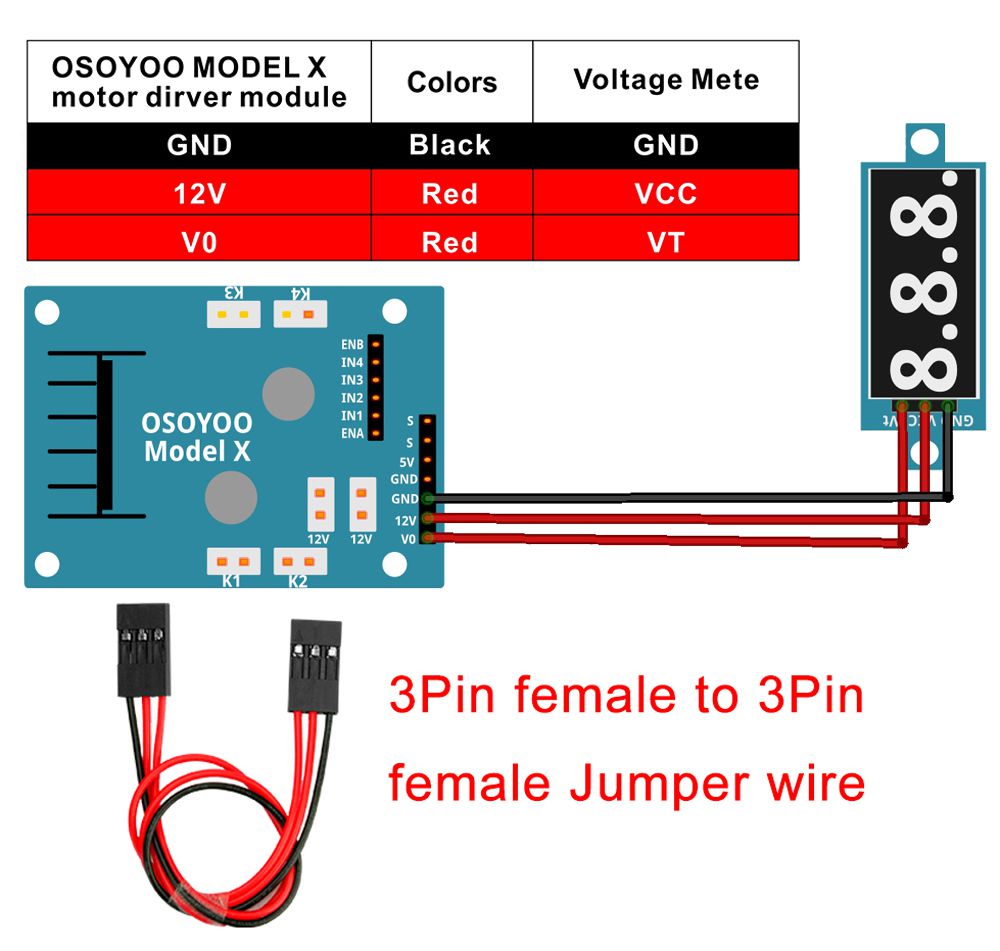
Passo 2: collegare il misuratore di tensione al modulo driver motore OSOYOO MODEL X con fili del ponticello da femmina a femmina a 3 pin come sotto lo schema di connessione:
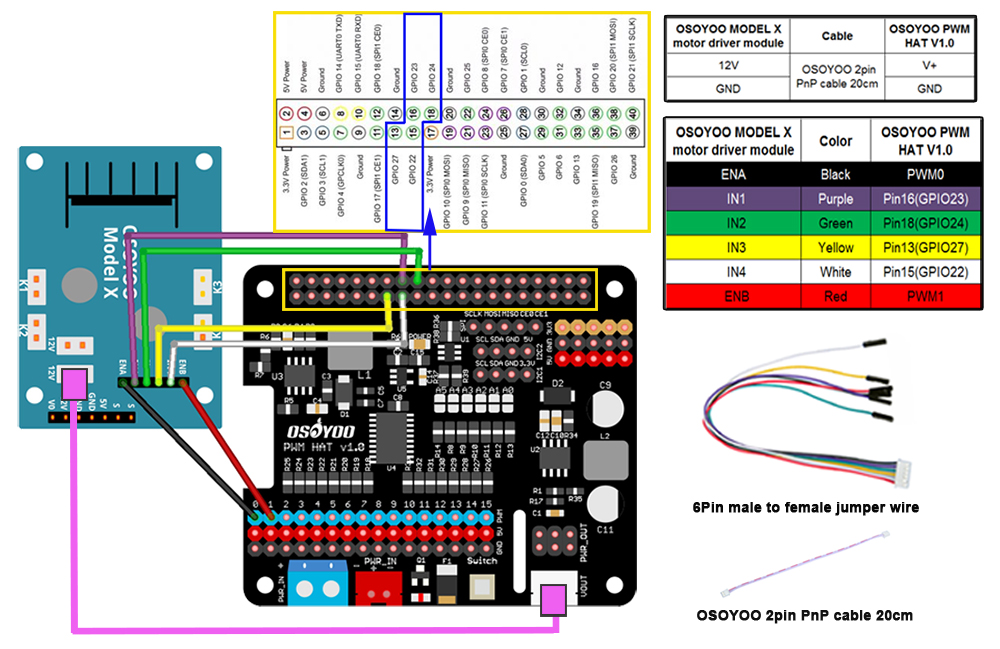
Passo 3: collegare il modulo driver motore OSOYOO MODEL X al cavo OSOYOO PWM Hat V1.0 con cavo jumper da femmina a femmina a 6 pin, collegare anche il cavo a 2 pin da 20 cm come segue:
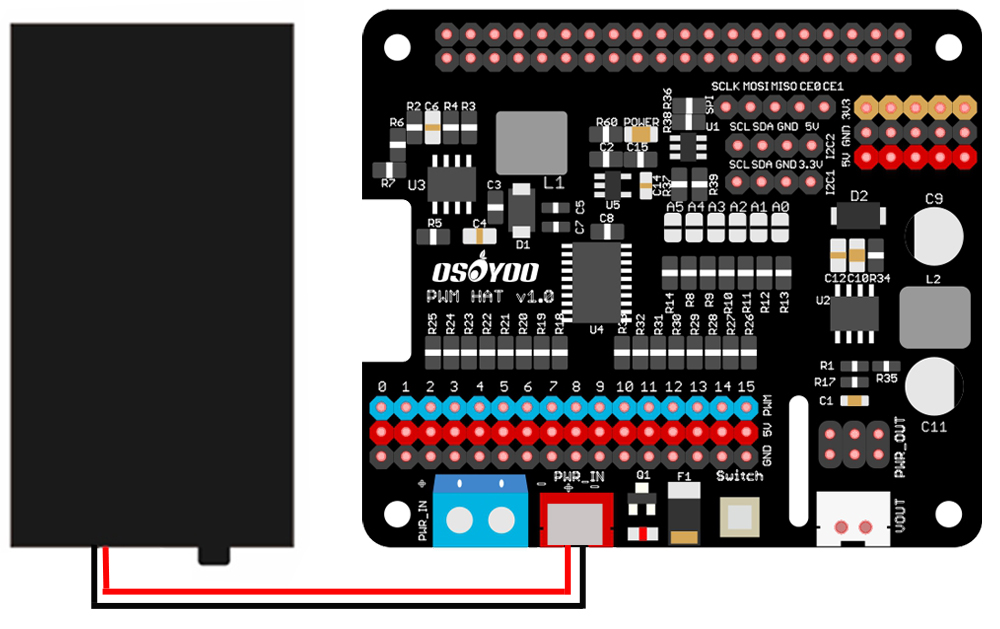
Passo 4: collegare la scatola della batteria 18650 a OSOYOO PWM Hat V1.0 come indicato di seguito:
Passo 5: collegare lo chassis superiore allo chassis inferiore con viti esagonali M3 * 10 da 4 pezzi e rondelle M3 da 4 pezzi
Passo 6: installare le batterie 18650 nella confezione della batteria per 18650 secondo le seguenti istruzioni (Nota: controllare le istruzioni della casella e assicurarsi che la direzione polare sia corretta, altrimenti può distruggere il dispositivo e causare rischio di incendio.)
Sistema operativo: Questo tutorial è stato testato su Raspberry Pi Bookworm e Trixie OS.
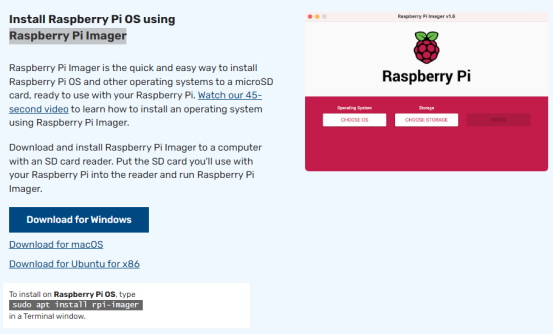
Ecco i passaggi per installare il sistema operativo Raspberry Pi:
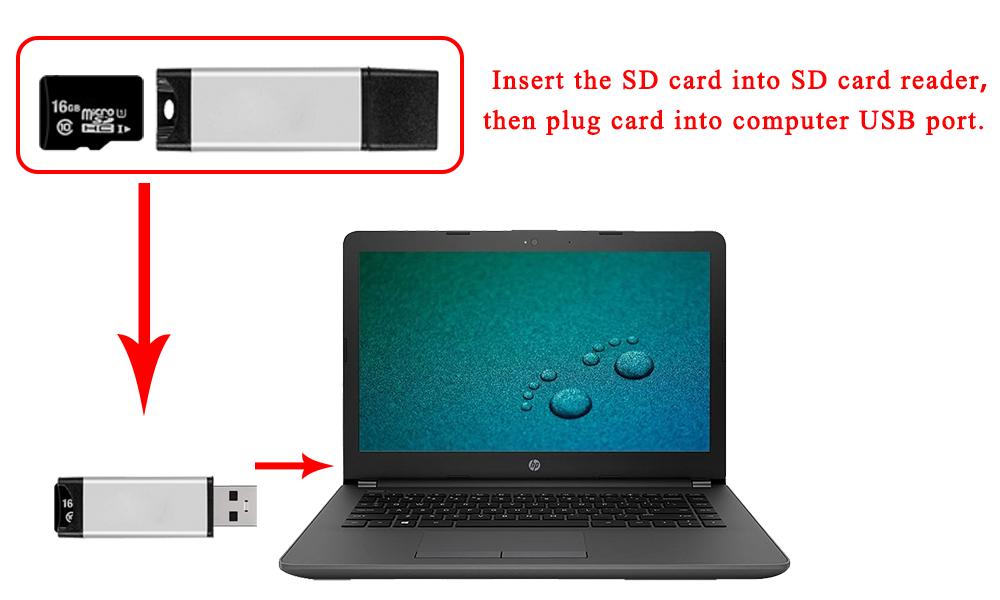
Passaggio 1: masterizza il sistema operativo Raspberry Pi su una scheda SD nuova o formattata (minimo 16 GB) (salta questo passaggio se la tua scheda SD ha l’immagine del sistema operativo Raspberry Pi preinstallata).
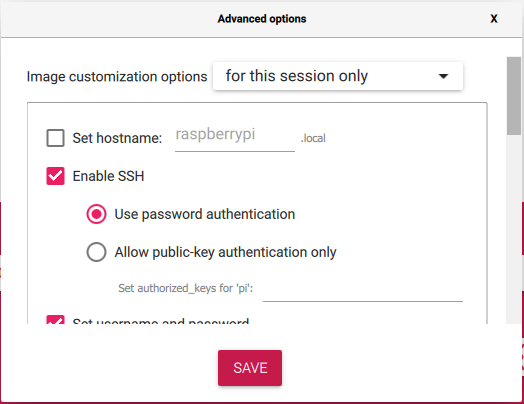
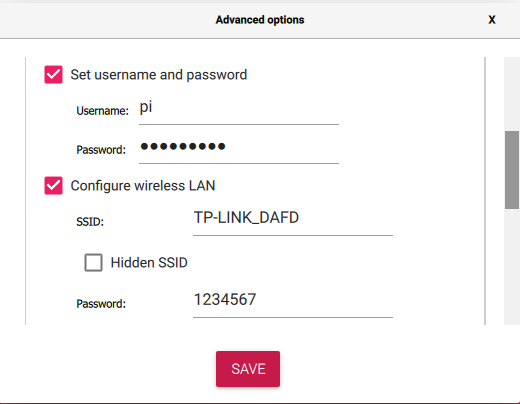
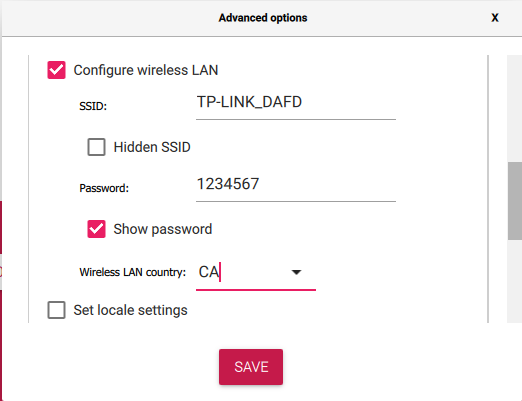
Nota: modificare le impostazioni per abilitare SSH, impostare nome utente e password e connettersi al Wi-Fi durante la scrittura del sistema operativo Raspberry Pi.
Passaggio 2: conoscere l’indirizzo IP
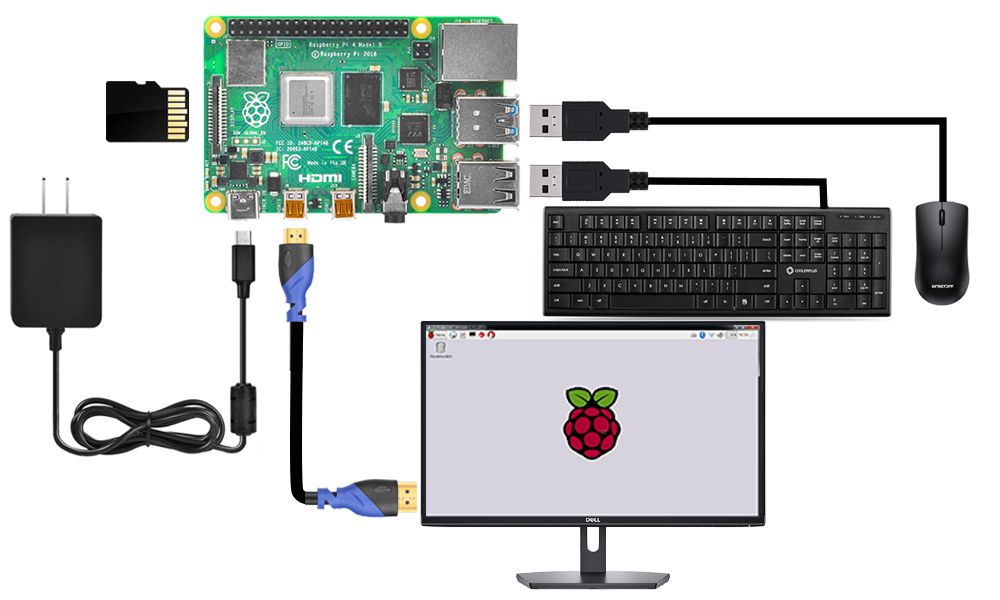
1. Collega il Raspberry Pi al monitor HDMI o alla TV. Collega una tastiera e un mouse alle porte USB del Raspberry Pi. Inserisci la scheda SD (dal passaggio 1) nello slot del Raspberry Pi (se hai installato la tua auto robot Raspberry Pi, sostituisci il Raspberry Pi nella figura seguente con la tua auto robot).
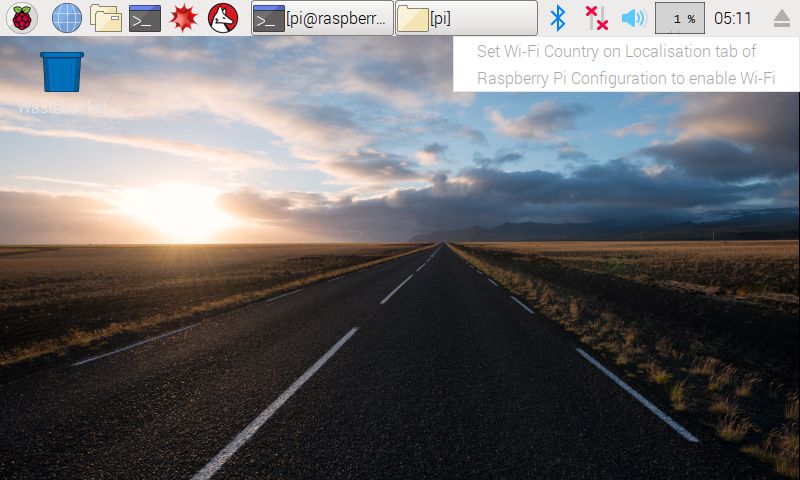
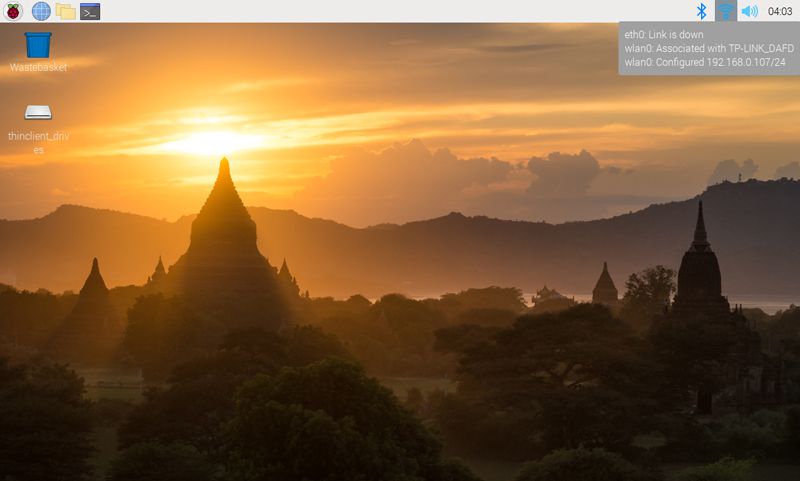
2. Se si passa con il mouse sull’icona Lan e viene visualizzato il seguente avviso:
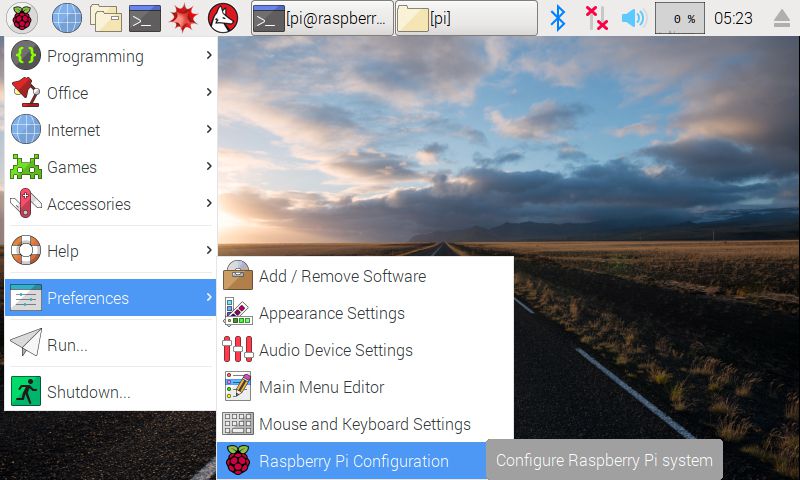
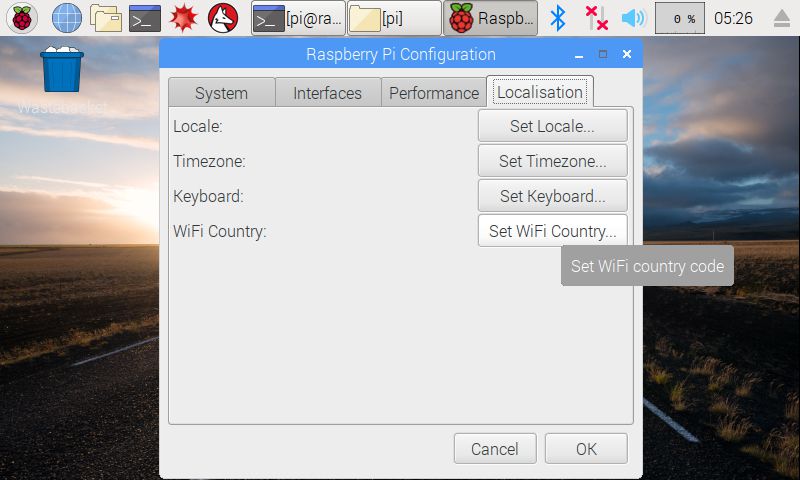
3. Fare clic su Configura connessione Wi-Fi come segue:
4. Individuare l’indirizzo IP del RPi.
Metodo A: collegare il Pi al monitor e al mouse, fare clic sull’icona LAN o WIFI per ottenere l’indirizzo IP come mostrato nella foto seguente.
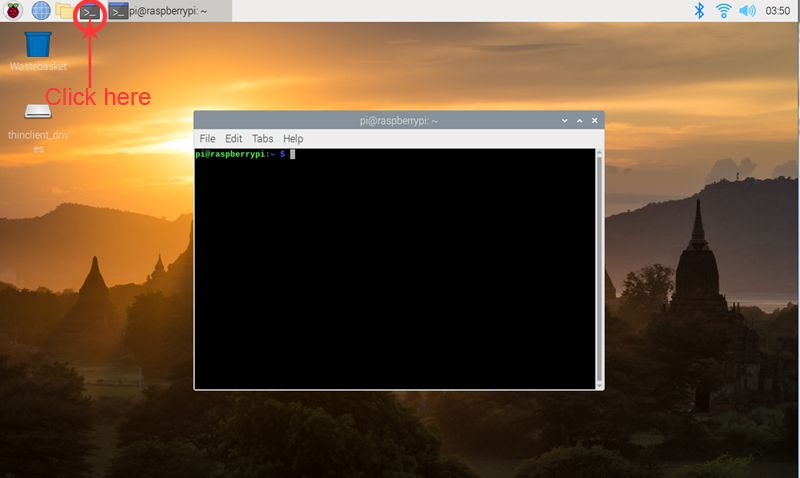
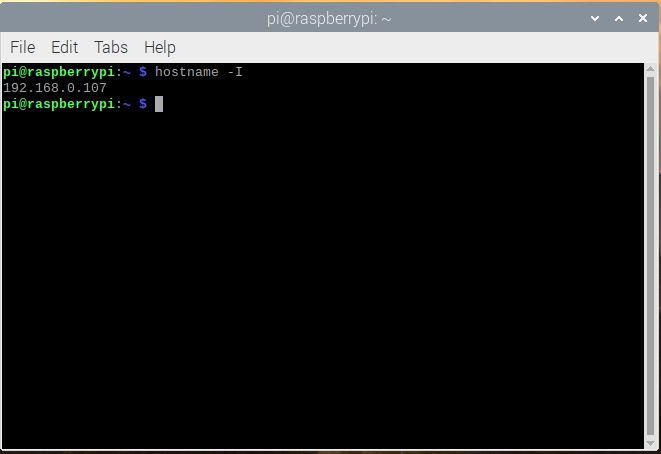
Metodo B: clicca sull’icona Terminale sullo schermo, scrivi il seguente comando nella finestra del terminale per ottenere il tuo indirizzo IP:
hostname -I
Passaggio 3: utilizzare gli strumenti ssh per controllare Raspberry Pi da remoto
Nota:
1) Per ulteriori informazioni su come utilizzare lo strumento ssh per controllare Raspberry Pi da remoto, visitare il link: https://osoyoo.com/2017/06/20/raspberry-pi-3-basic-tutorial/#7 2) Nelle nostre lezioni di esempio, utilizziamo un PC Windows come dispositivo console remoto e PuTTY come strumento ssh
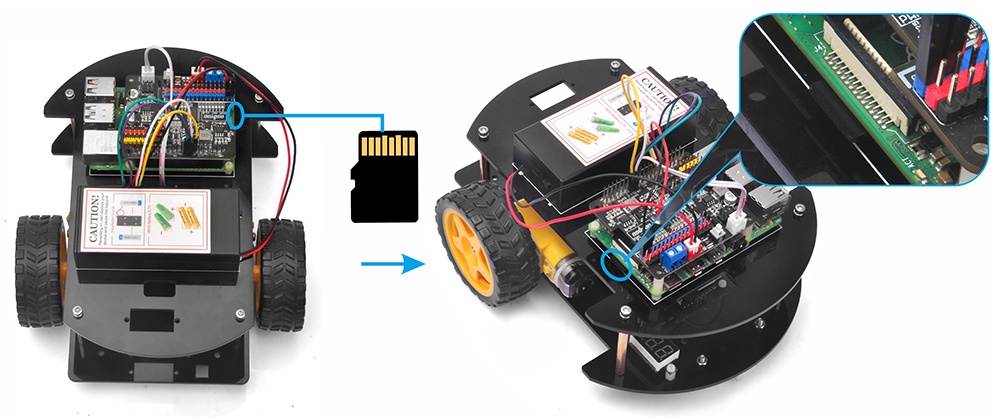
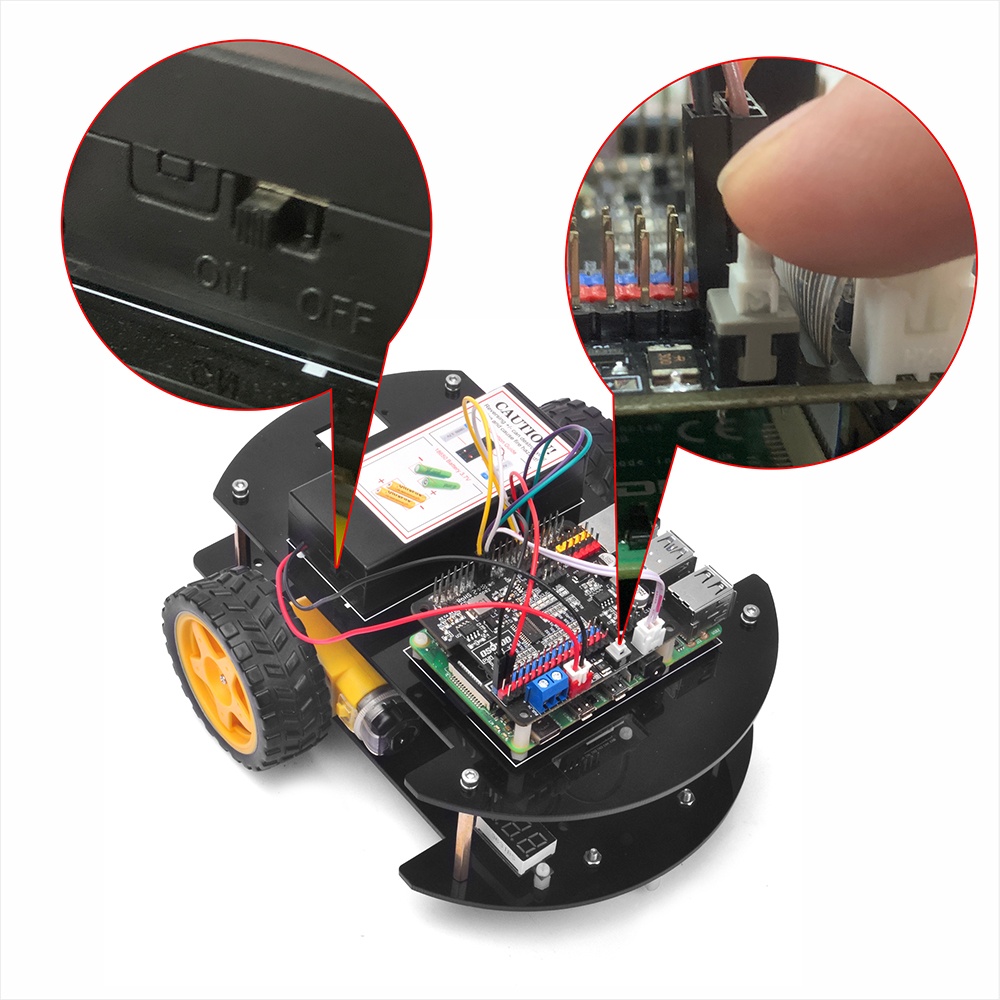
1. Installare il Raspberry Pi con la scheda SD (dal passaggio 2) sull’auto robot (attenzione: è necessario prima spegnere il Raspberry Pi), quindi accendere l’auto robot.
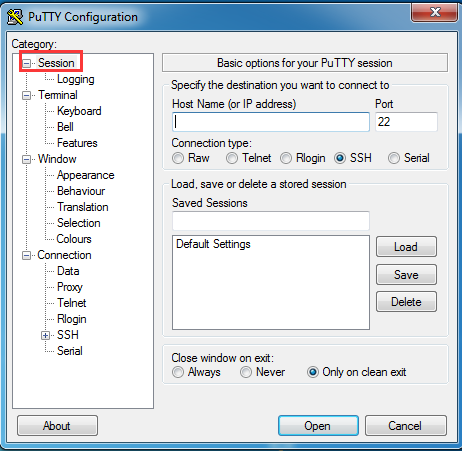
3. Apri PuTTY e clicca su Session nella struttura ad albero a sinistra (generalmente è compressa all’avvio di PuTTY):
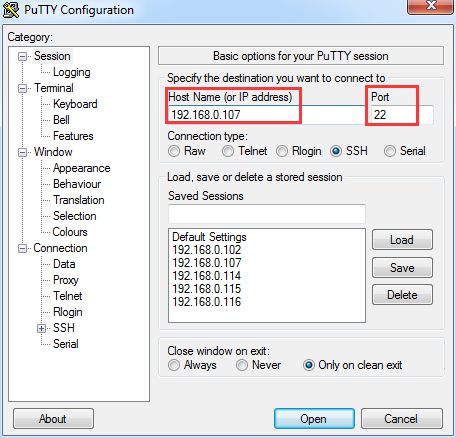
4. Inserisci l’indirizzo IP che hai ottenuto nella casella di testo sotto Nome host (o indirizzo IP) e 22 sotto Porta (il valore predefinito è 22), quindi fai clic su Apri.
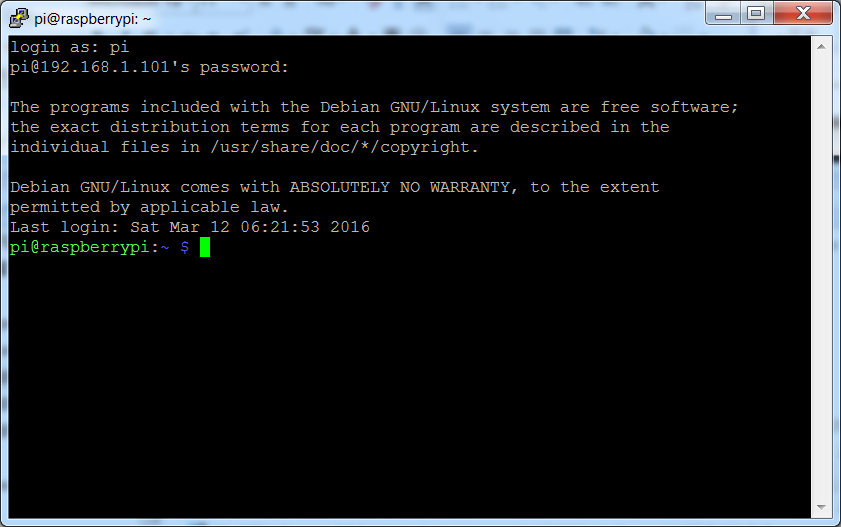
5. Tieni presente che quando accedi per la prima volta al Raspberry Pi con l’indirizzo IP, ti verrà richiesto un promemoria di sicurezza. Basta cliccare su Sì. Quando la finestra PuTTY richiede di effettuare il login come: digita il nome utente: pi e la password: raspberry (quella predefinita, se non l’hai cambiata).
Nota: quando digiti la password, la finestra non mostra nulla, ma in realtà stai digitando. Concentrati quindi solo sulla digitazione corretta e premi Invio. Dopo aver effettuato correttamente l’accesso al RPi, la finestra mostrerà quanto segue:
Se utilizzi un MacBook o un computer Linux (ad esempio un altro Raspberry Pi), puoi aprire direttamente un terminale shell anziché Putty e digitare il seguente comando:
ssh pi@your_robot_car_ip
your_robot_car_ip indica l’IP della tua auto robot Raspberry Pi, che puoi leggere con il comando hostname -I.
Ad esempio, se l’IP della tua auto robotizzata è 192.168.0.111, il comando corretto per accedere alla tua auto è: ssh pi@192.168.0.111
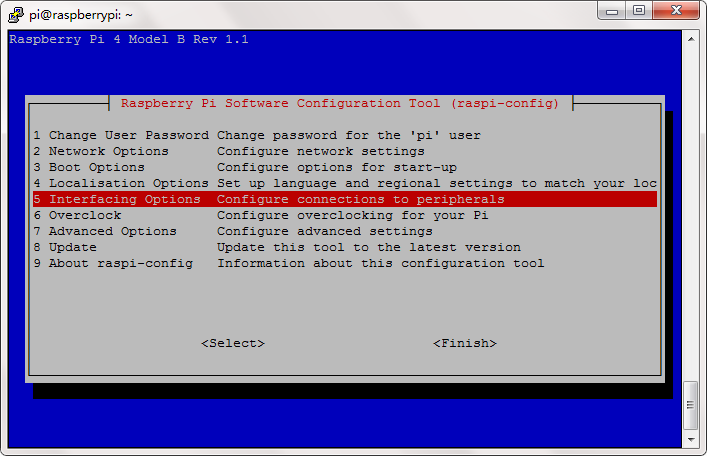
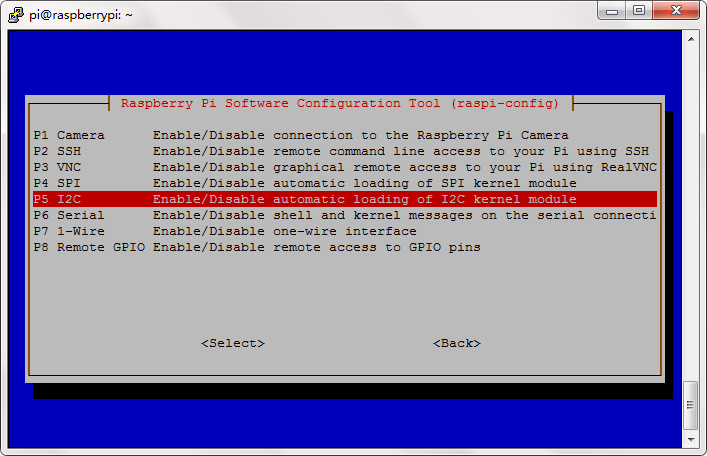
Passaggio 4: Abilitare I2C
Se non hai abilitato I2C, esegui il seguente comando per abilitare I2C.
sudo raspi-config
Quindi selezionare Interfacing Options->I2C->Yes->Ok->Finish
Passaggio 5: aggiornare il sistema:
sudo apt-get update
sudo apt-get upgrade
Passaggio 6: installare pca9685 e la libreria servokit eseguendo i seguenti comandi
Passaggio 8: Posizionare l’auto robot sul terreno, quindi eseguire il programma Python per i movimenti di base digitando il seguente comando nel terminale:
python picar-basic4.py
Dopo aver eseguito il codice Python sopra riportato, la tua auto robotizzata avanzerà per 1 secondo, poi indietreggerà per 1 secondo, girerà a sinistra per 1 secondo e girerà a destra per 1 secondo, quindi si fermerà. (Se l’auto robotizzata non si muove come descritto sopra, controlla innanzitutto i collegamenti).
Abbiamo inserito commenti completi nel codice Python di esempio http://osoyoo.com/driver/picar/picar-basic4.py. Se hai alcune conoscenze di base di Python, puoi facilmente capire come personalizzare il codice per la tua applicazione.

































 Passo 2: collegare il misuratore di tensione al modulo driver motore OSOYOO MODEL X con fili del ponticello da femmina a femmina a 3 pin come sotto lo schema di connessione:
Passo 2: collegare il misuratore di tensione al modulo driver motore OSOYOO MODEL X con fili del ponticello da femmina a femmina a 3 pin come sotto lo schema di connessione: