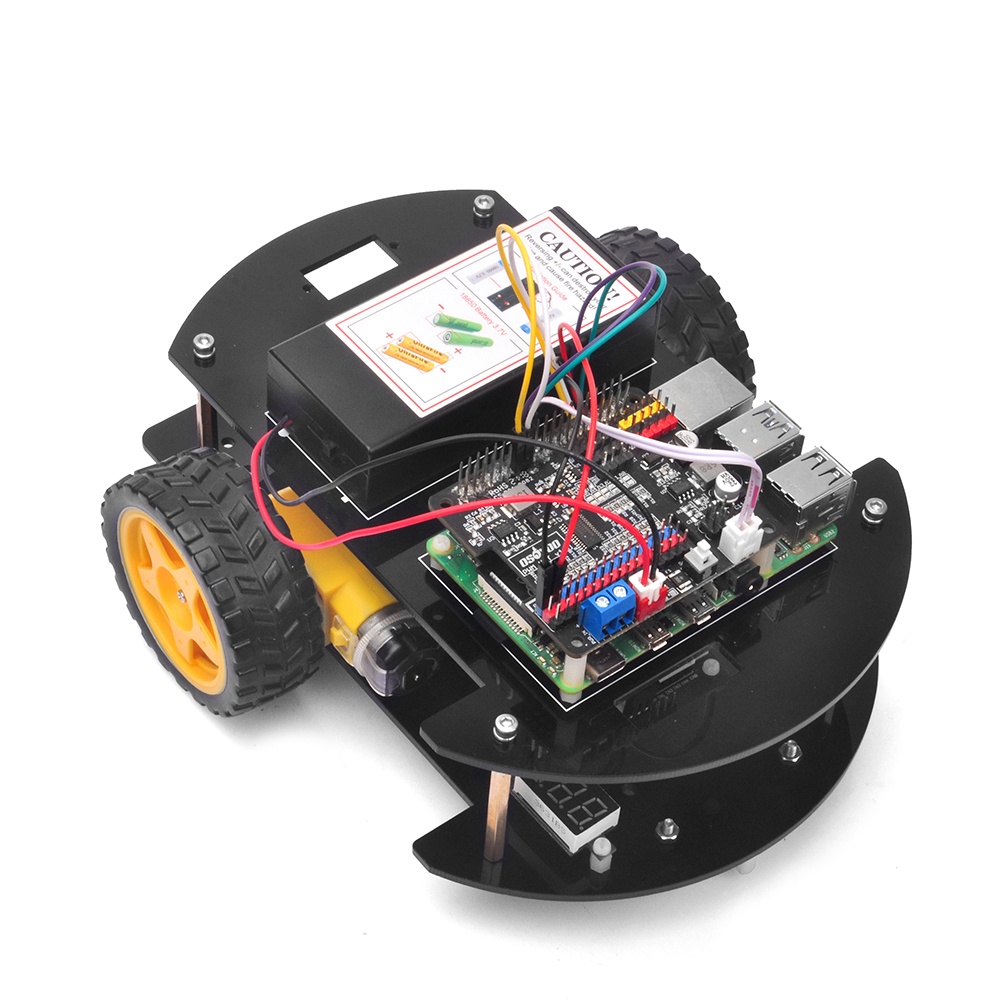
Bienvenue à la première leçon d’OSOYOO Robot Car pour Raspberry Pi !
Dans cette leçon, nous allons d’abord vous expliquer comment installer le framework de la voiture robot OSOYOO pour Raspberry Pi, puis nous vous expliquerons simplement comment installer Raspberry Pi OS pour le Raspberry pi et comment utiliser la console pour contrôler raspberry pi. Nous utiliserons OSOYOO Robot Car pour Raspberry Pi pour faire quelques mouvements simples.
Si vous avez réussi le mouvement de test de cette leçon, cela signifie que le Raspberry pi, les moteurs, la batterie, la carte modèle X, le OSOYOO PWM HAT et les connexions filaires entre ces pièces fonctionnent bien, et vous pouvez passer à d’autres exemples de leçons.
Toutes les leçons sont basées sur le cadre de cette leçon. Veuillez suivre attentivement cette leçon.
Non.
Image
Appareil
Qté.
Accessoires
Lien
1
Carte Raspberry pi 2/3/4
(pas dans l’emballage)
1
M2.5 Vis en plastique x4
M2.5 Écrou en plastique x2
M2.5 Pilier en plastique x4
M2.5 * 12 piliers en plastique x2
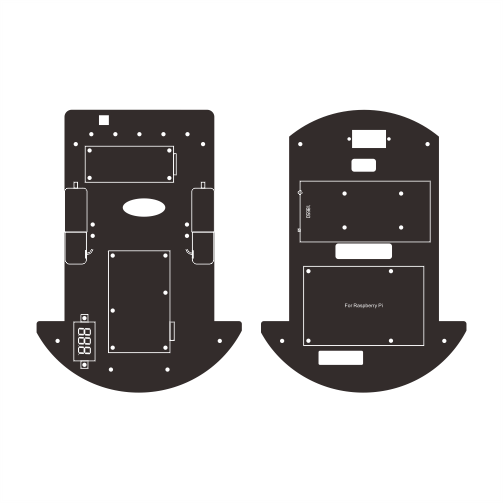
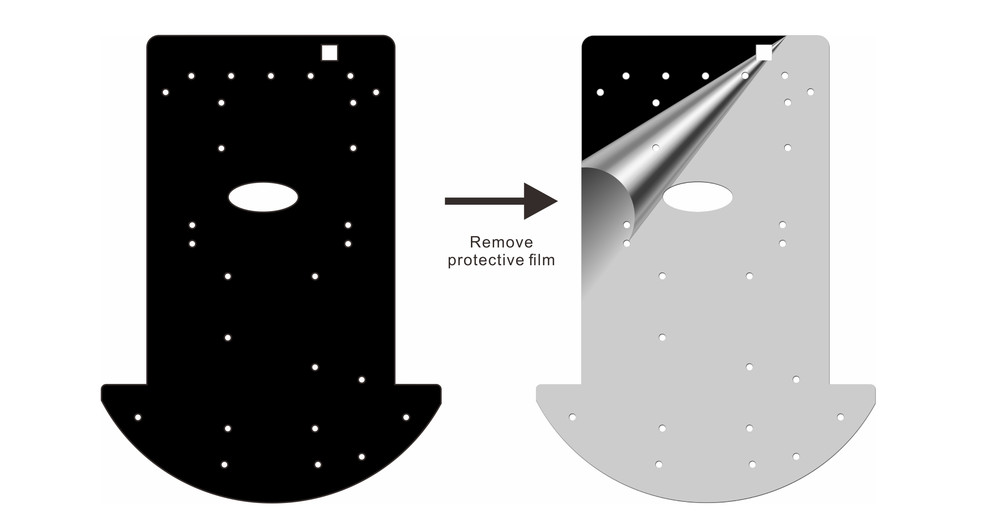
1) Retirez le film protecteur sur le châssis supérieur et inférieur de la voiture (chaque châssis de voiture a un film de protection).
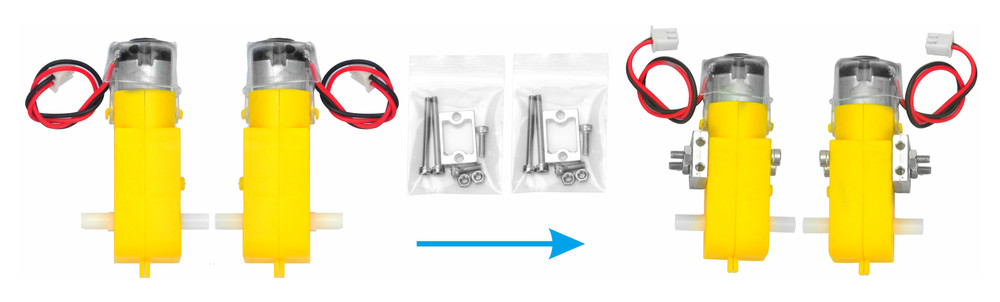
2) Installez 2 moteurs avec des supports de moteur en métal comme suit.
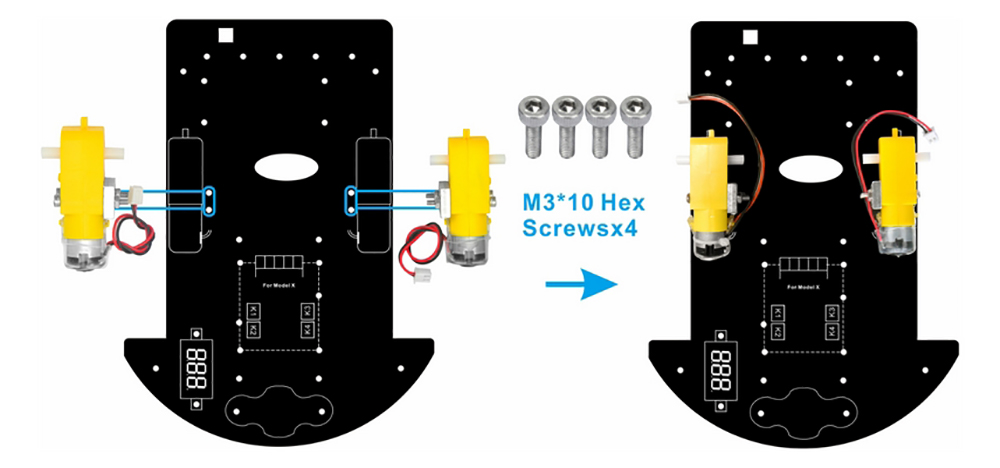
3) Installez 2 moteurs sur le châssis inférieur de la voiture avec vis M3*10. (Vis dans l’ensemble du support de moteur métallique. Veuillez ajouter des rondelles M3 entre les vis et le châssis si les vis se détachent facilement.)
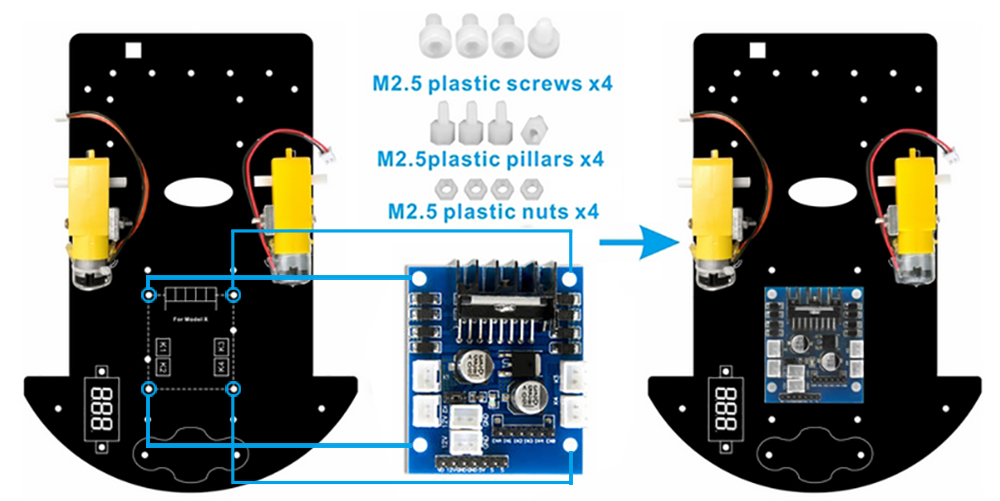
4) Installez le module de commande de moteur OSOYOO MODEL X sur le châssis inférieur de la voiture avec des vis en plastique 4pcs M2.5, des piliers en plastique et des écrous en plastique. (Assurez-vous d’installer le module pilote de moteur OSOYOO MODEL X dans le bon sens.)
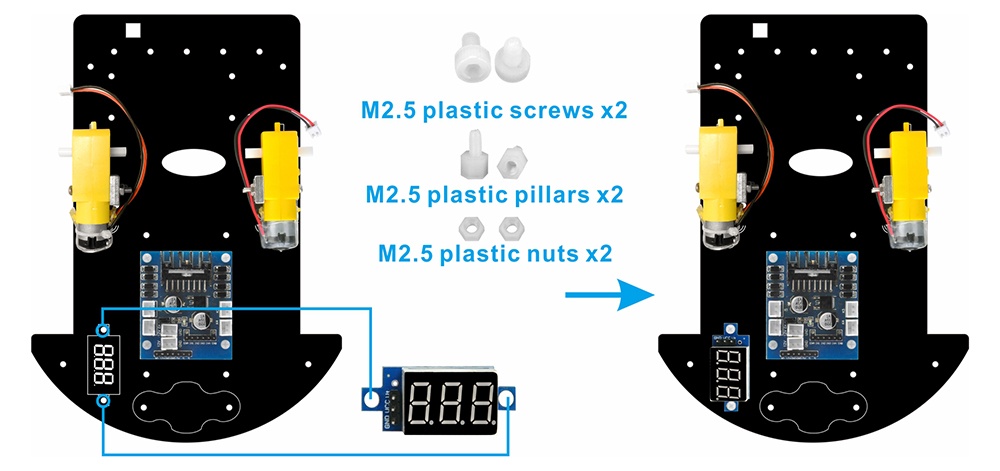
5) Installez un tensiomètre sur le châssis inférieur de la voiture avec des vis en plastique 2pcs M2.5, des piliers en plastique et des écrous en plastique.
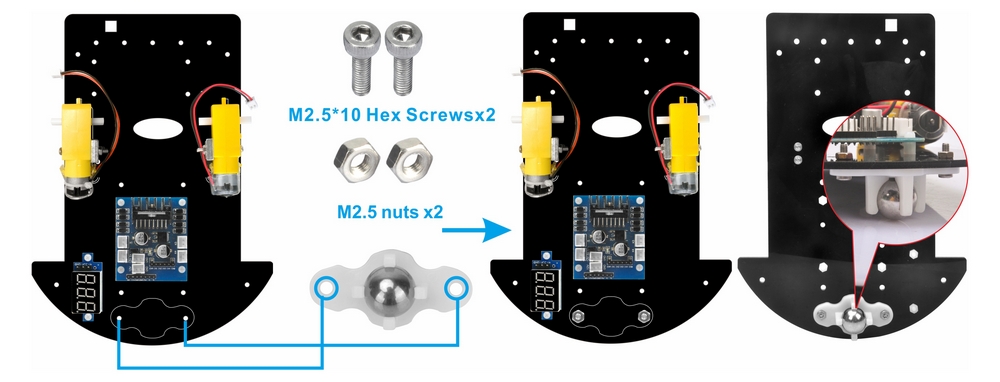
6) Installez une roue universelle sous le châssis inférieur de la voiture avec 2pcs M3x10 hex vis et écrous M3.
7) Installez 2 roues sur les moteurs (Si vous trouvez que les roues s’installent trop étroitement pour bouger, vous pouvez retirer les vis sur roues)
8) Installez des piliers en cuivre 4pcs sur un châssis de voiture bas avec des vis hexagonales 4pcs M3x10. (Veuillez ajouter des lavages M3 entre les vis et le châssis si les vis se détachent facilement.)
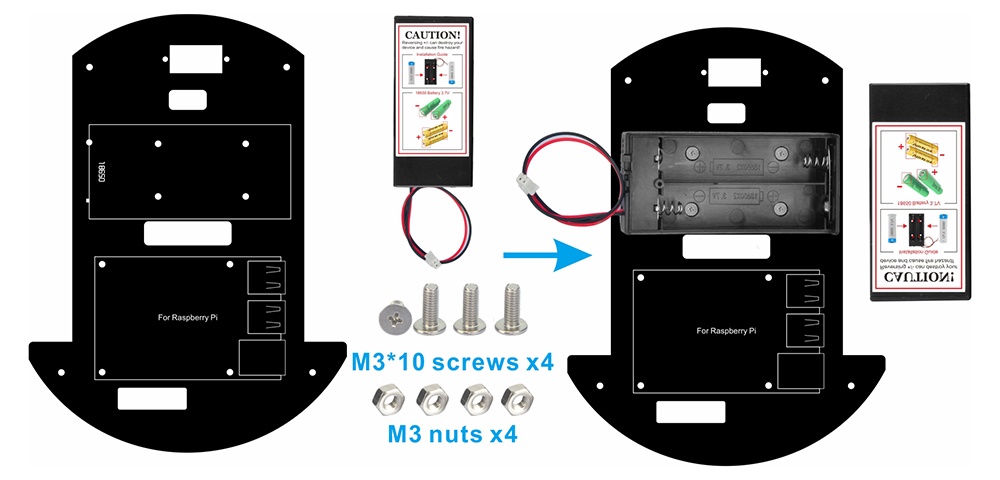
9) Installez la boîte de batterie 18650 sur le châssis supérieur de la voiture avec des vis M3x10 4pcs et des écrous M3.
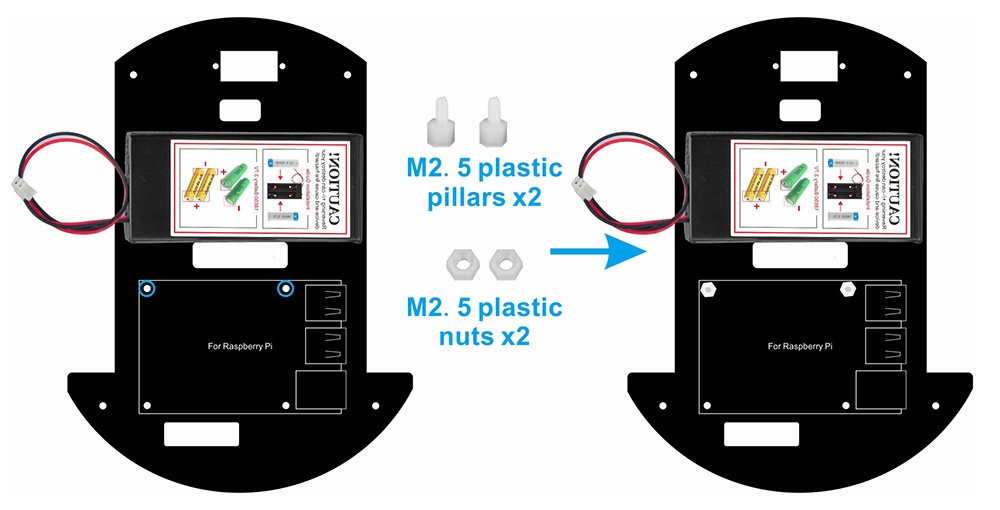
10) Fixez les piliers en plastique 2pcs M2.5 sur le châssis supérieur comme suit:
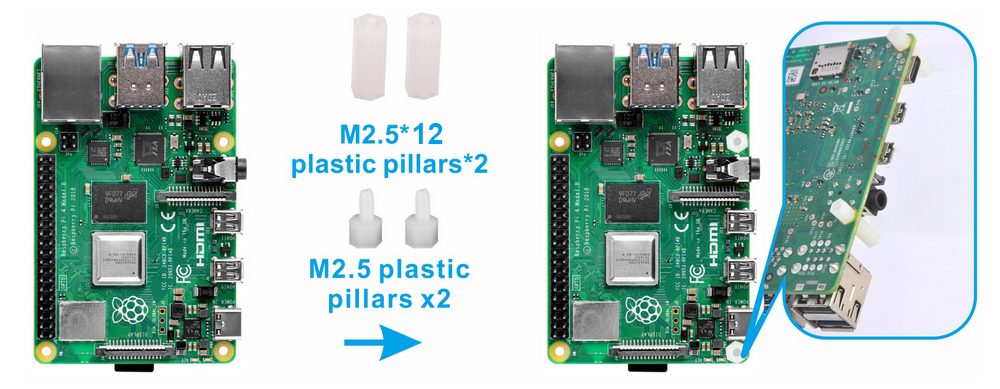
11) Utilisez le pilier en plastique M2.5 croisé Raspberry Pi et le pilier en plastique M2.5 * 12 de bas en haut comme suit
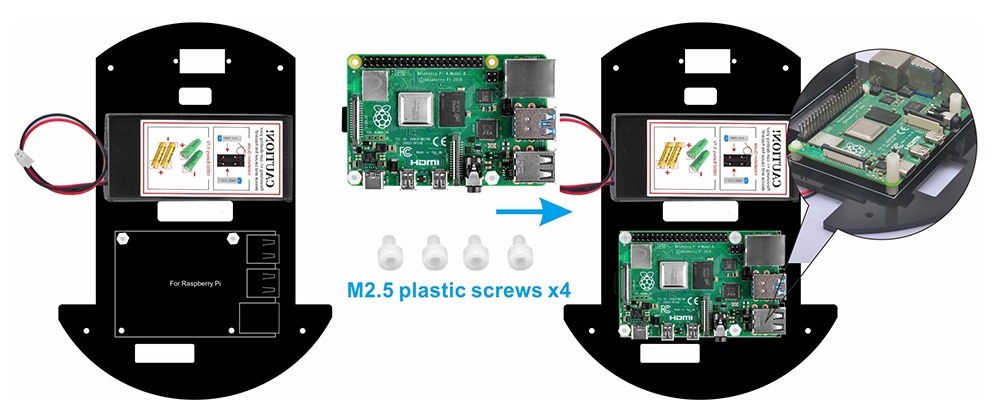
12) Installez des vis en plastique 2pcs M2.5 sous le châssis et des vis en plastique 2pcs M2.5 sur Raspberry Pi
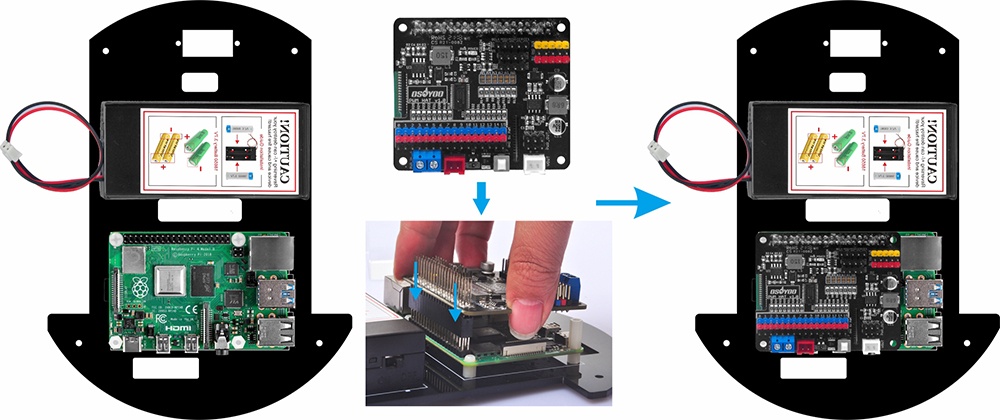
13) Insérez OSOYOO PWM Hat sur Raspberry Pi comme suit:
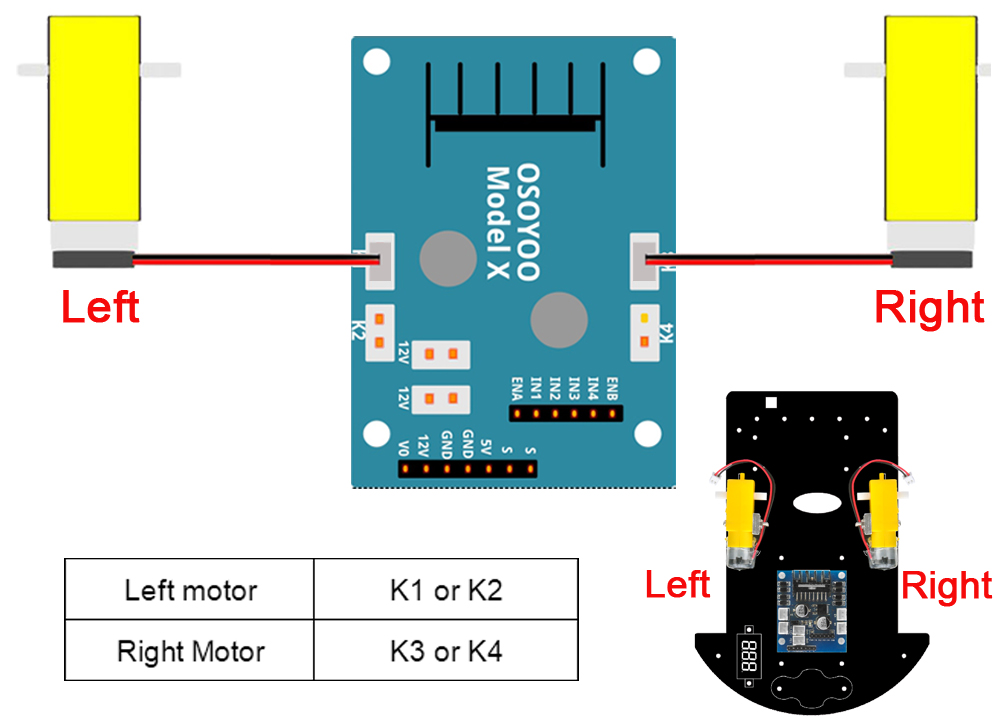
Étape 1: CONNECTEZ le moteur gauche à la prise K1 ou K2 du module de commande de moteur OSOYOO Model X, moteur droit à la prise K3 ou K4 comme indiqué dans le graphique suivant:
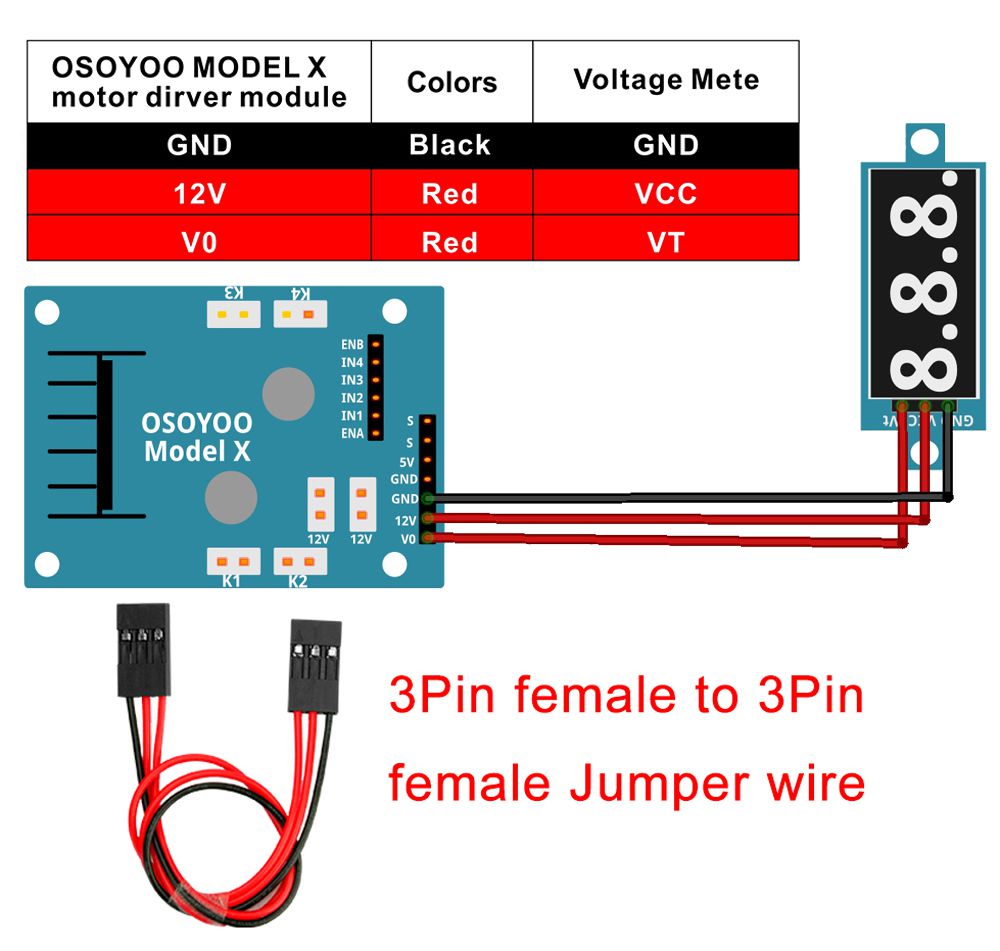
Étape 2: Connectez le voltmètre au module de pilote de moteur OSOYOO MODEL X avec des fils de démarrage femelle à femelle à 3 broches comme schéma de connexion ci-dessous:
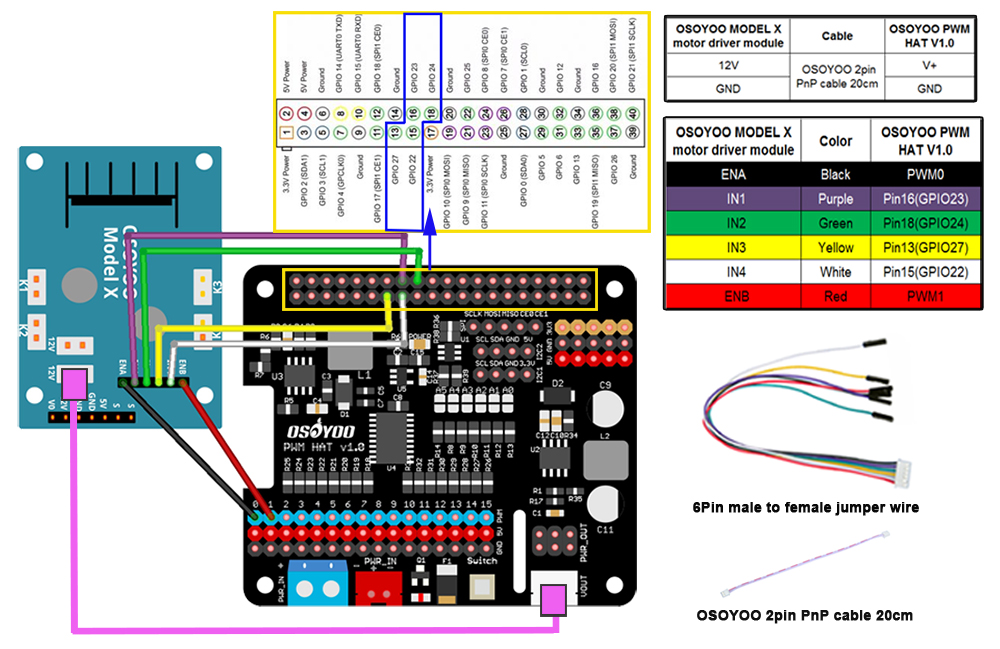
Étape 3: Connectez le module de pilote de moteur OSOYOO MODEL X à OSOYOO PWM Hat V1.0 avec fil de cavalier femelle à femelle 6 broches, connectez également le câble 2 broches de 20 cm comme graphique suivant:
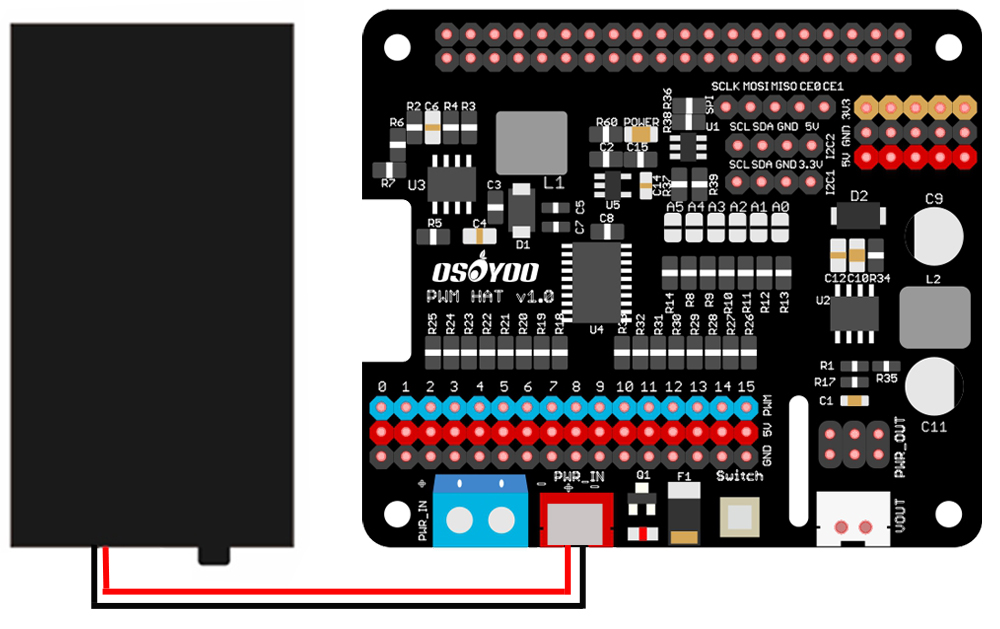
Étape 4: Connectez le boîtier de batterie 18650 à OSOYOO PWM Hat V1.0 comme indiqué ci-dessous:
Étape 5: Connectez le châssis supérieur au châssis inférieur avec 4pcs M3 * 10 hex vis et 4pcs M3 laveuses
Étape 6: Veuillez installer vos piles 18650 dans le boîtier de la batterie pour 18650 conformément aux instructions suivantes (Remarque: Vérifiez les instructions de la boîte et assurez-vous que la direction polaire est correcte, sinon cela peut détruire votre appareil et causer un risque d’incendie.)
Maintenant, l’installation matérielle est presque en panne.
Système d’exploitation : Ce tutoriel a été testé sous Raspberry Pi Bookworm et Trixie OS.
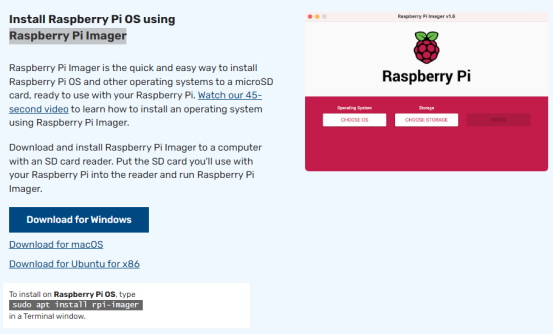
Voici les étapes à suivre pour installer le système d’exploitation Raspberry Pi :
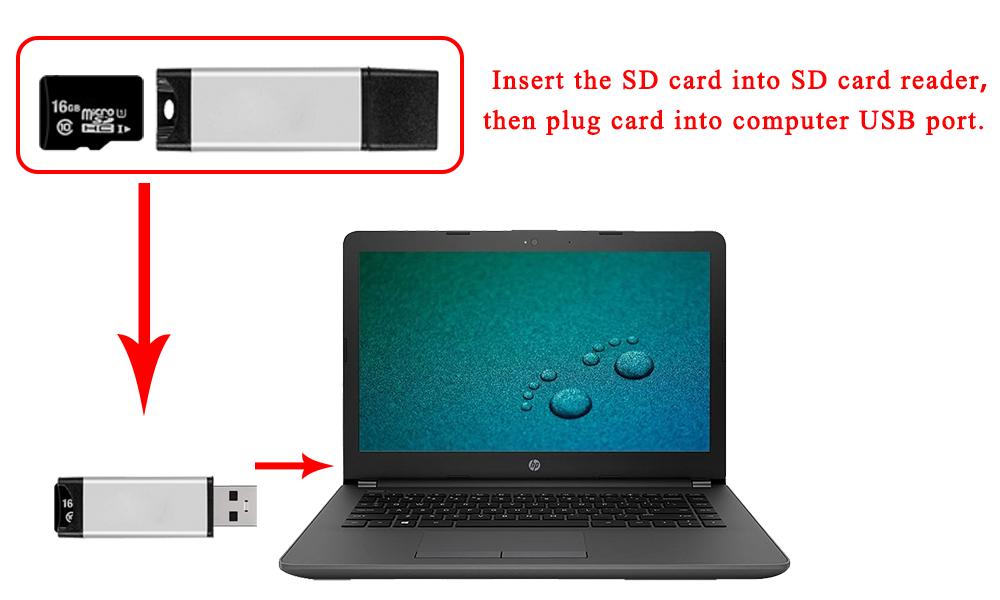
Étape 1 : Gravez le système d’exploitation Raspberry Pi sur une carte SD neuve ou formatée (minimum 16 Go) (ignorez cette étape si votre carte SD contient déjà une image du système d’exploitation Raspberry Pi préinstallée).
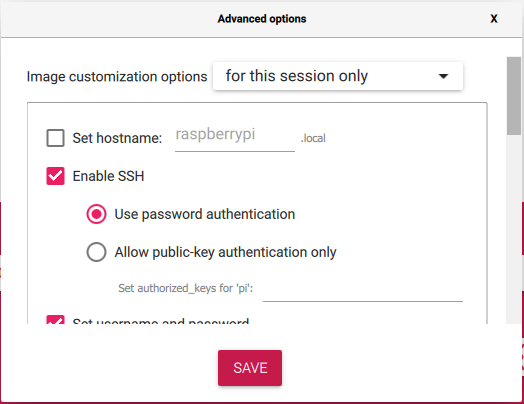
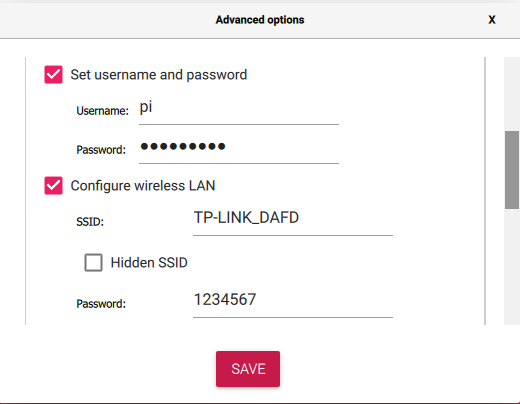
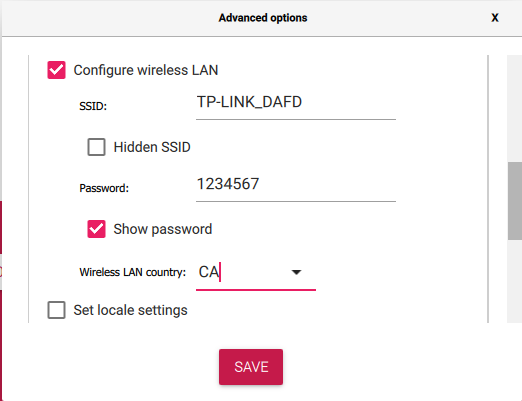
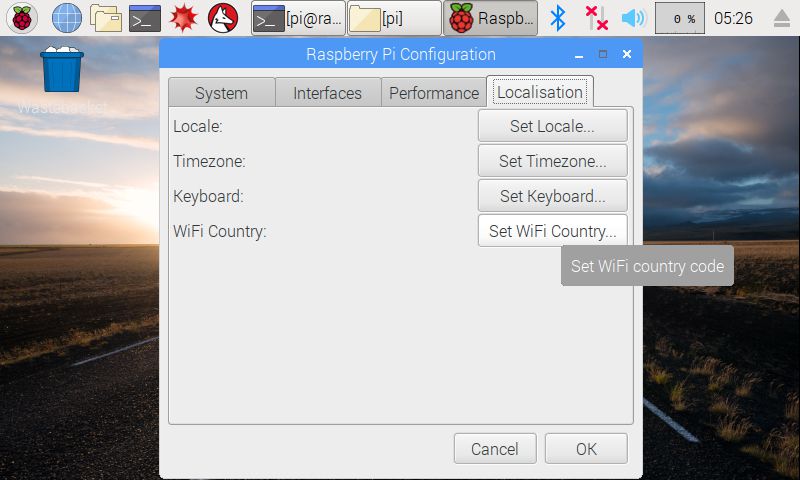
Remarque : veuillez modifier les paramètres pour activer SSH, définir un nom d’utilisateur et un mot de passe, et connecter le Wi-Fi lors de l’écriture du système d’exploitation Raspberry Pi.
Étape 2 : connaître l’adresse IP
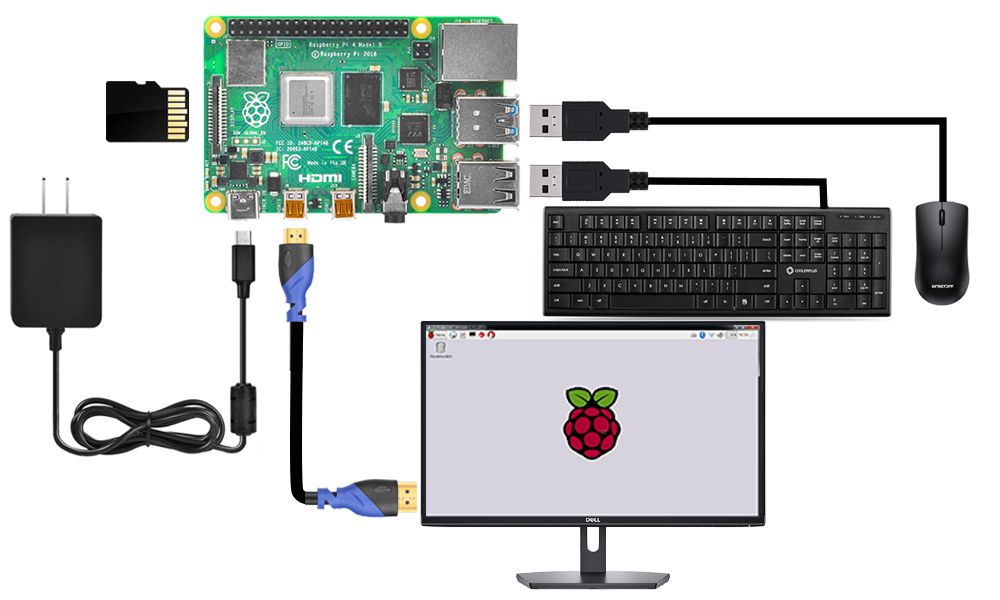
1. Connectez le Raspberry Pi à votre moniteur HDMI ou à votre téléviseur. Branchez un clavier et une souris aux ports USB du Raspberry Pi. Insérez la carte SD (étape 1) dans le logement de votre Raspberry Pi (si vous avez installé votre voiture robot Raspberry Pi, veuillez remplacer le Raspberry Pi de l’image suivante par votre voiture robot).
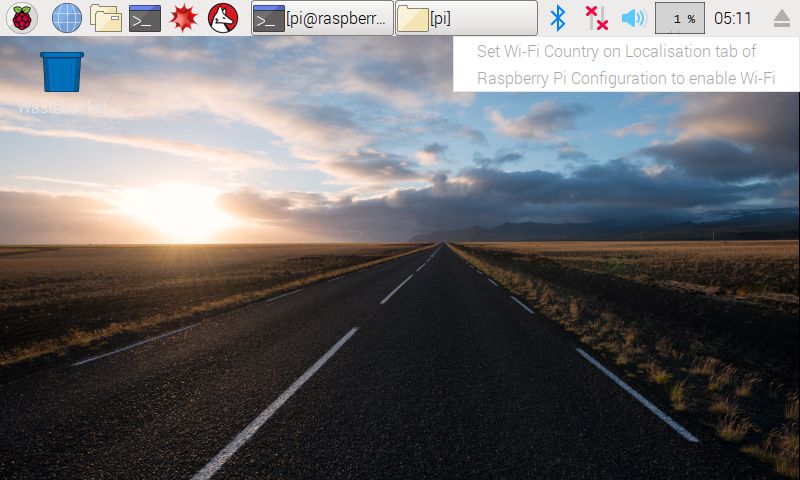
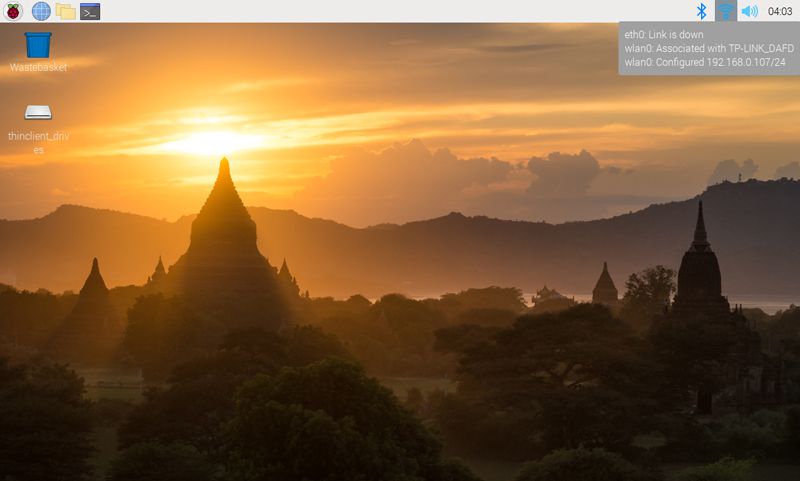
2. Si vous passez sur l’icône Lan et que vous obtenez l’avis suivant :
3. Veuillez cliquer sur « Configurer la connexion Wi-Fi » comme suit :
4. Trouvez l’adresse IP du RPi.
Méthode A : connectez votre Pi à un écran et à une souris, cliquez sur l’icône LAN ou WIFI pour obtenir l’adresse IP comme indiqué sur la photo suivante.
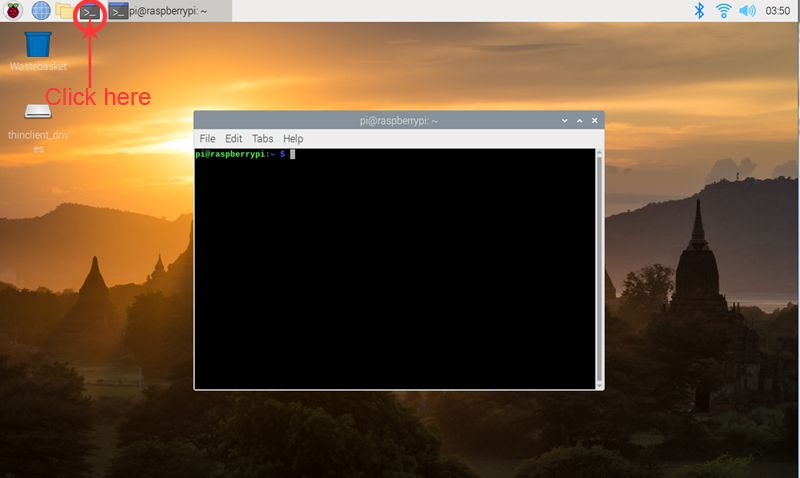
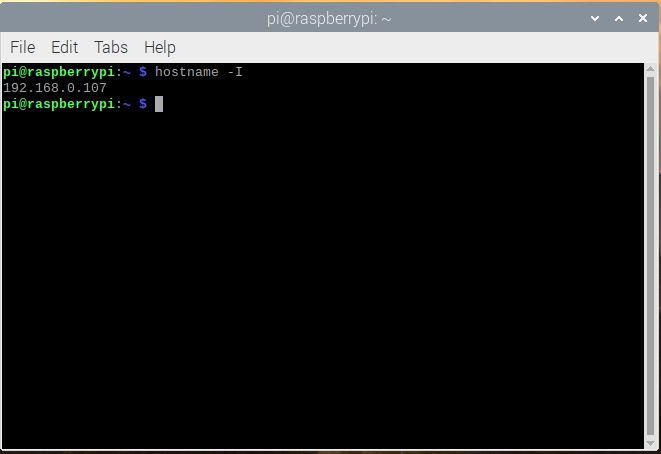
Méthode B : Cliquez sur l’icône Terminal à l’écran, puis tapez la commande suivante dans la fenêtre du terminal pour obtenir votre adresse IP :
hostname -I
Étape 3 : Utilisez les outils ssh pour contrôler le Raspberry Pi à distance
Remarque:
1) Pour en savoir plus sur l’utilisation de l’outil ssh pour contrôler le Raspberry Pi à distance, veuillez consulter le lien suivant : https://osoyoo.com/2017/06/20/raspberry-pi-3-basic-tutorial/#7 2) Dans nos exemples de leçons, nous utilisons un PC Windows comme console à distance et PuTTY comme outil ssh
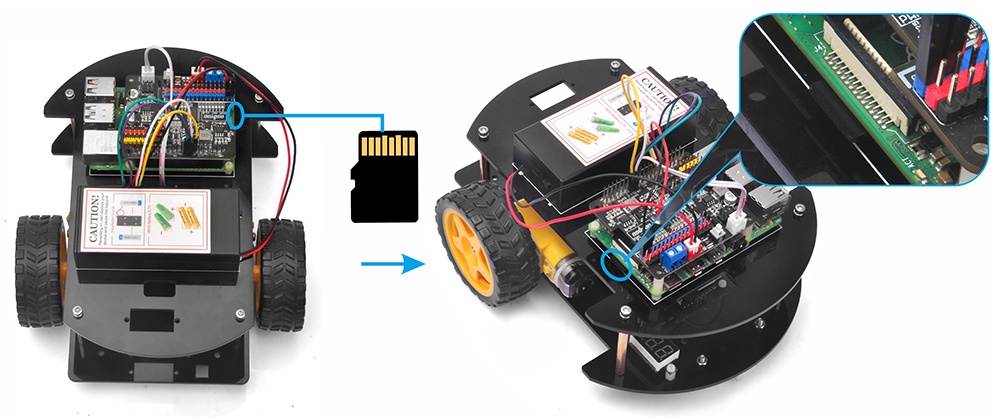
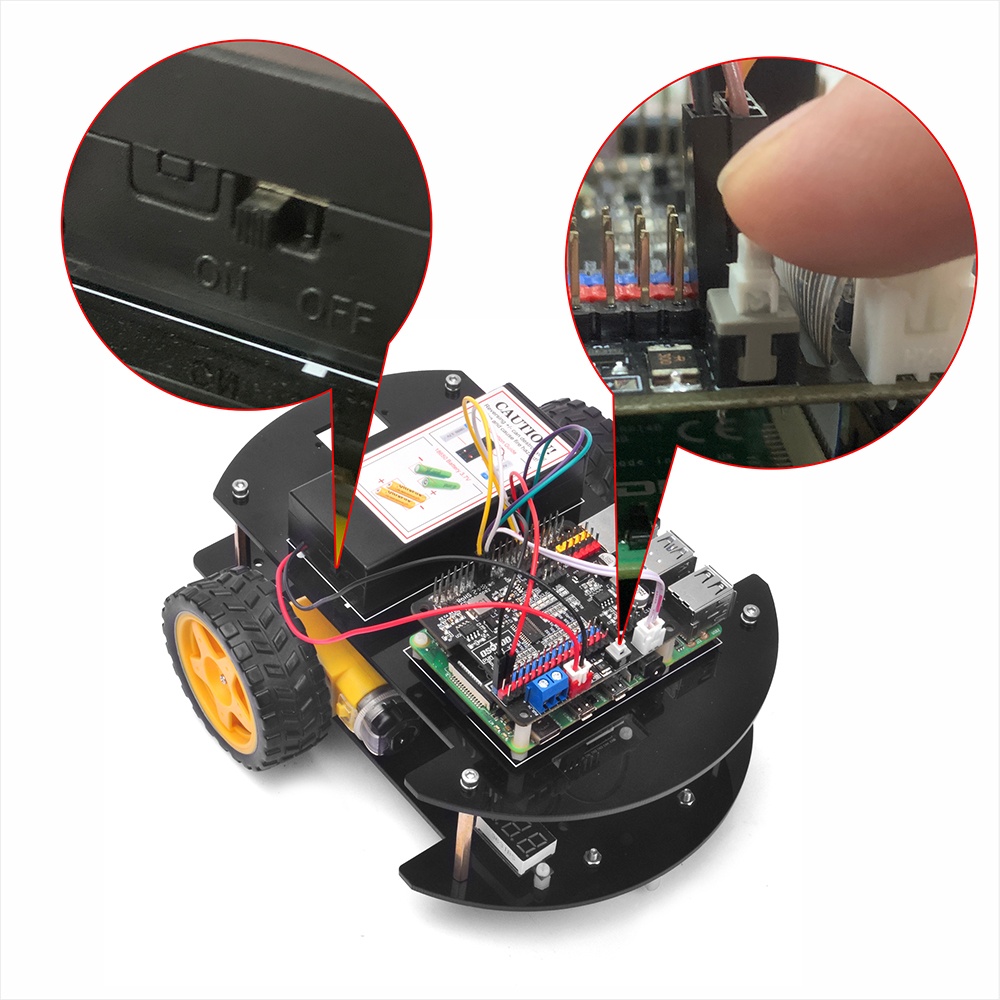
1. Installez le Raspberry Pi avec la carte SD (étape 2) sur la voiture robotisée (attention : vous devez d’abord éteindre le Raspberry Pi), puis allumez la voiture robotisée.
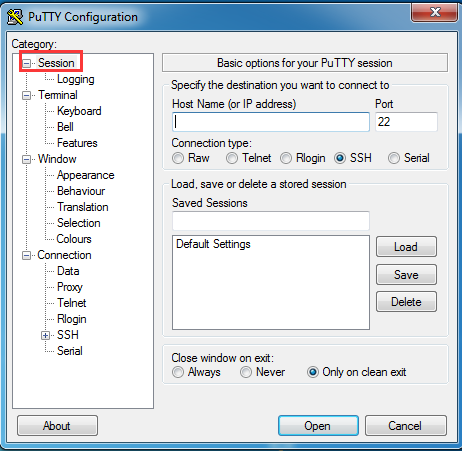
3. Ouvrez PuTTY et cliquez sur Session dans la structure arborescente à gauche (elle est généralement réduite au démarrage de PuTTY) :
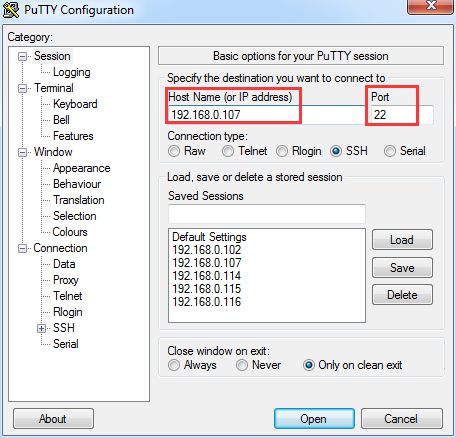
4. Entrez l’adresse IP que vous avez obtenue dans la zone de texte sous Nom d’hôte (ou adresse IP) et 22 sous Port (la valeur par défaut est 22), puis cliquez sur Ouvrir.
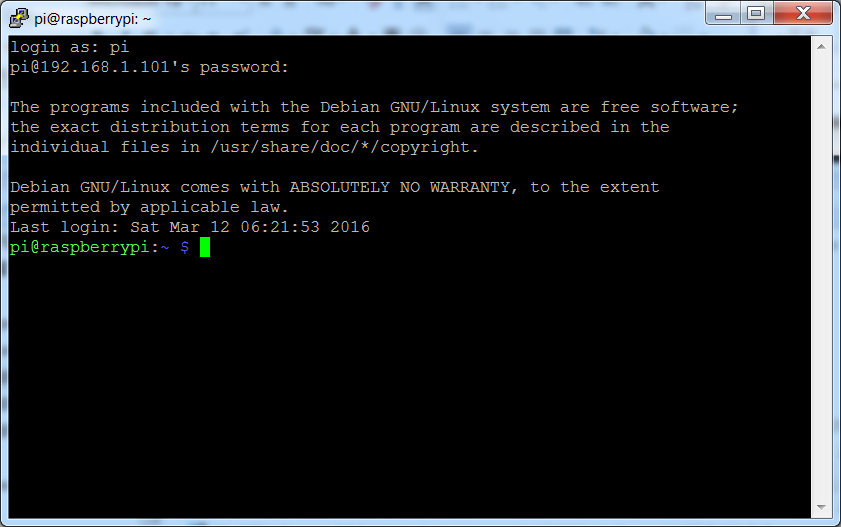
5. Notez que lorsque vous vous connectez pour la première fois au Raspberry Pi avec l’adresse IP, un rappel de sécurité s’affiche. Cliquez simplement sur Oui. Lorsque la fenêtre PuTTY vous invite à vous connecter, saisissez le nom d’utilisateur pi et le mot de passe raspberry (celui par défaut, si vous ne l’avez pas modifié).
Remarque : lorsque vous saisissez le mot de passe, la fenêtre n’affiche rien, mais vous êtes bien en train de saisir les caractères. Concentrez-vous simplement sur la saisie et appuyez sur Entrée. Une fois connecté au RPi, la fenêtre s’affiche comme suit :
Si vous utilisez un MacBook ou un ordinateur Linux (c’est-à-dire un autre Raspberry Pi), vous pouvez ouvrir directement un terminal shell au lieu de Putty et taper la commande suivante :
ssh pi@your_robot_car_ip
your_robot_car_ip désigne l’adresse IP de votre voiture robotisée Raspberry Pi, que vous pouvez obtenir à l’aide de la commande hostname -I.
Par exemple, si l’adresse IP de votre voiture robotisée est 192.168.0.111, la commande correcte pour accéder à votre voiture est : ssh pi@192.168.0.111
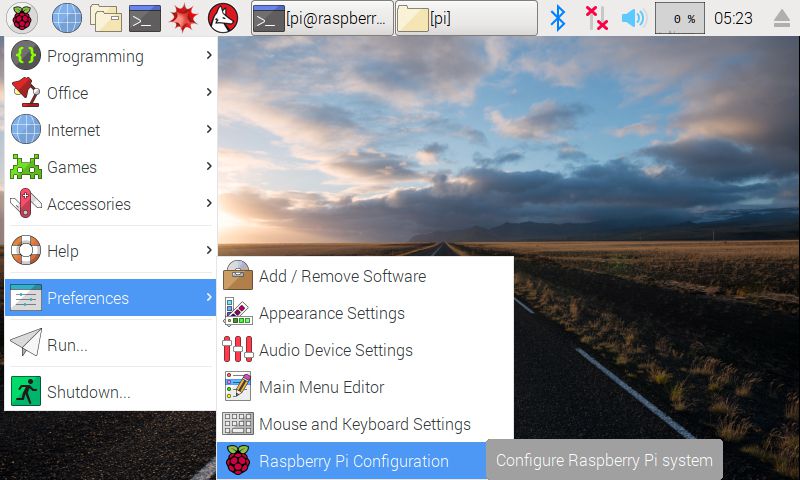
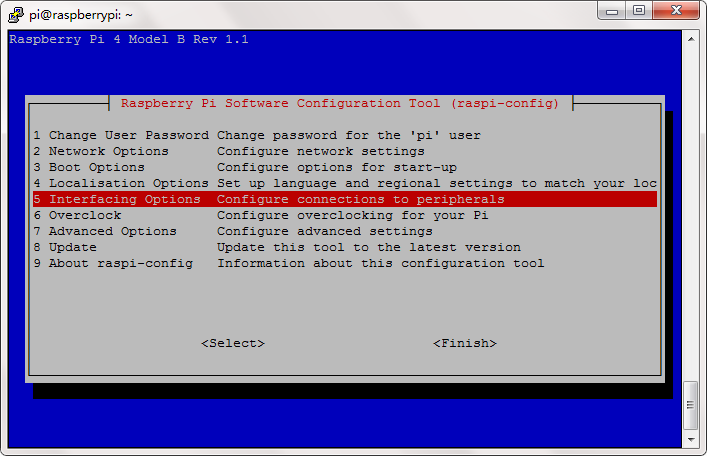
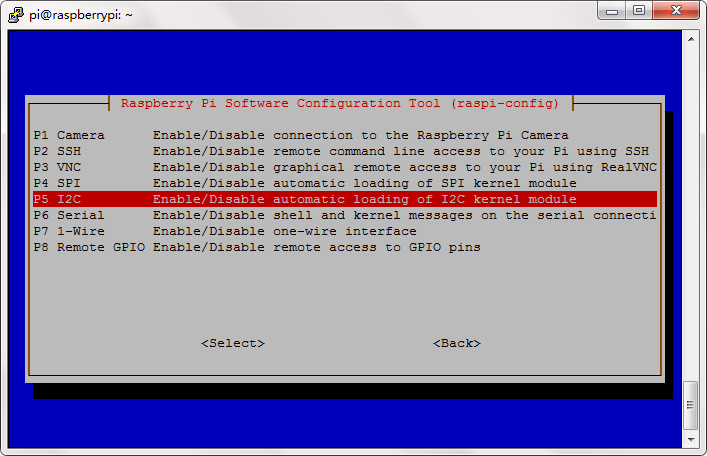
Étape 4 : Activer I2C
Si vous n’avez pas activé I2C, veuillez exécuter la commande suivante pour l’activer.
sudo raspi-config
Puis sélectionnez Interfacing Options->I2C->Yes->Ok->Finish
Étape 5 : mettez à niveau votre système:
sudo apt-get update
sudo apt-get upgrade
Étape 6 : Installez pca9685 et la bibliothèque servokit en exécutant les commandes suivantes
Étape 8 : Placez la voiture robotisée au sol, puis exécutez le programme Python de mouvement de base en tapant la commande suivante dans le terminal :
python picar-basic4.py
Une fois le code Python ci-dessus exécuté, votre voiture robotisée avancera pendant 1 seconde, puis reculera pendant 1 seconde, tournera à gauche pendant 1 seconde, tournera à droite pendant 1 seconde, puis s’arrêtera. (Si la voiture robotisée ne se déplace pas comme indiqué ci-dessus, veuillez d’abord vérifier vos connexions.)
Nous avons ajouté des commentaires complets dans l’exemple de code Python http://osoyoo.com/driver/picar/picar-basic4.py. Si vous avez des connaissances de base en Python, vous pouvez facilement comprendre comment personnaliser le code pour votre propre application.

































 Étape 2: Connectez le voltmètre au module de pilote de moteur OSOYOO MODEL X avec des fils de démarrage femelle à femelle à 3 broches comme schéma de connexion ci-dessous:
Étape 2: Connectez le voltmètre au module de pilote de moteur OSOYOO MODEL X avec des fils de démarrage femelle à femelle à 3 broches comme schéma de connexion ci-dessous: