In questa lezione usiamo Python per programmare la nostra auto robot Raspberry Pi per guidare automaticamente lungo una linea nera in fondo bianco. Utilizzeremo cinque sensori di tracciamento IR per rilevare la linea.
Imparerai come Python legge i dati digitali dai pin GPIO.
No.
Immagine
Dispositivo
Qty.
Accessoristica
Collegamento
1
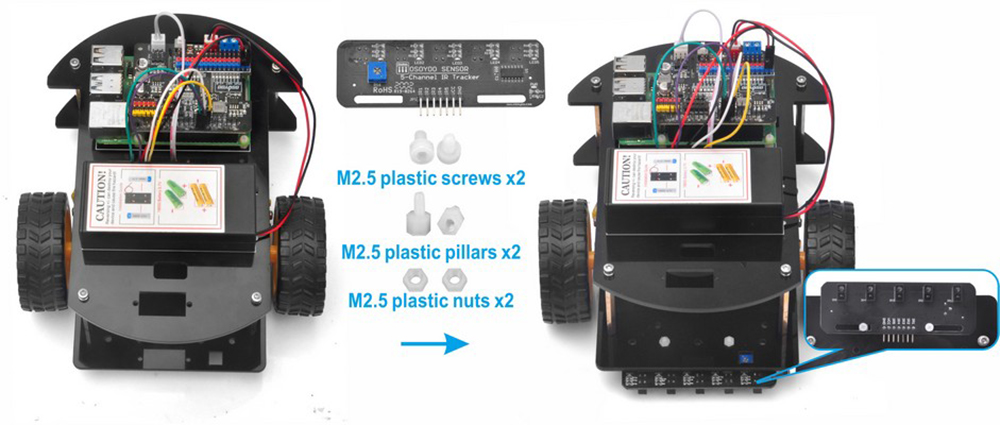
Modulo sensore di tracciamento
1
M2.5 Vite in plastica x 2
M2.5 Dado in plastica x2
M2.5 Pilastro in plastica x 2
Passaggio 2: Installare moduli sensore di tracciamento sotto il telaio inferiore dell’auto con viti in plastica M2.5 da 2 pezzi, montanti in plastica M2.5 e dadi in plastica M2.5.
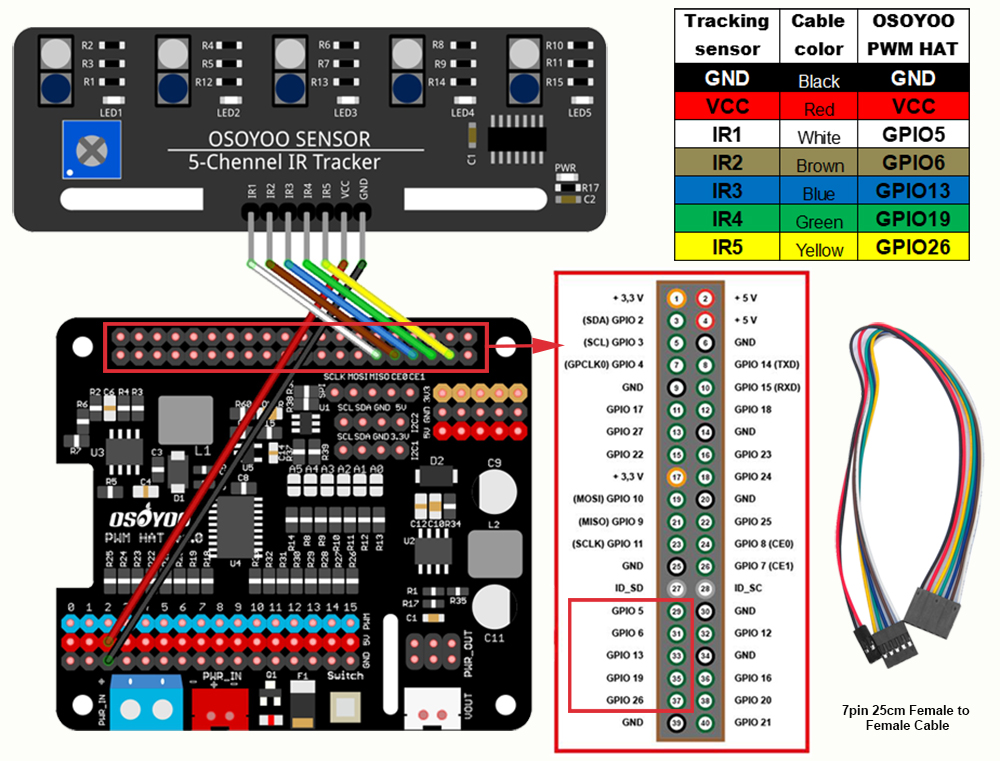
Passo 1: Collegare il pin GND-VCC del modulo sensore di tracciamento a OSOYOO PWM HAT con cavo femmina-femmina a 7 pin da 25 cm, come mostra la foto seguente (Ricorda: NON rimuovere alcun cavo esistente installato nella lezione 1):
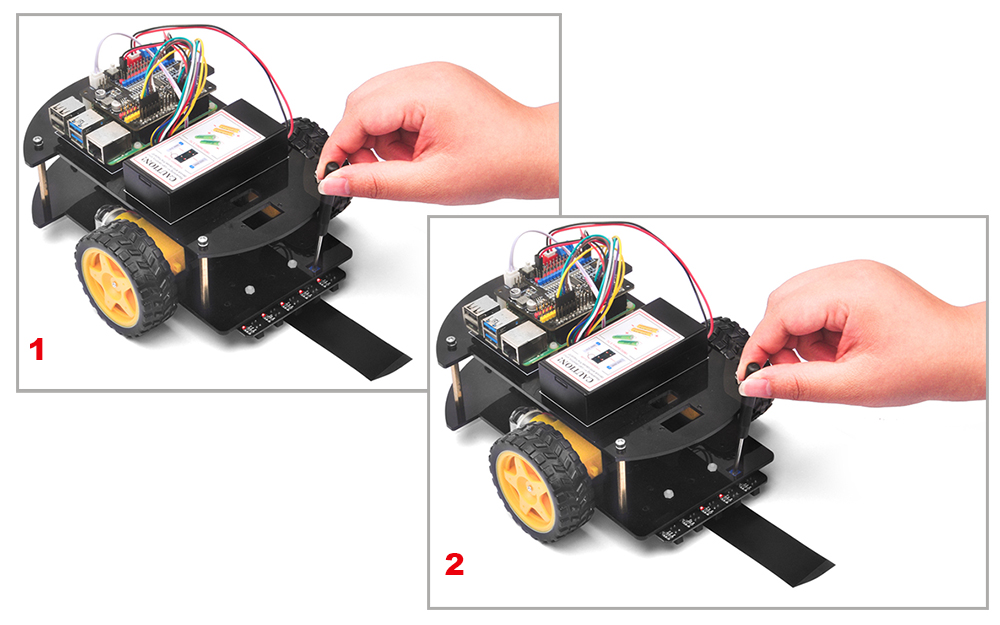
Passo 2: Regolare la sensibilità dei moduli del sensore di tracciamento.
Accendi l’auto e prepara una linea di binario nera su terreno bianco e accendi l’auto.
Metti ripetutamente l’auto sulla pista nera e sul terreno bianco per regolare la sensibilità del modulo di tracciamento.
Regolare il potenziometro sul sensore di tracciamento e assicurarsi che il LED indicatore corrispondente sia acceso quando il sensore di tracciamento è nero e il LED indicatore corrispondente sia spento quando il sensore di tracciamento è bianco.
Passo 1: Assicurati di aver installato rpi.gpio, la libreria adafruit-pca9685 e abilita I2C nella lezione 1.
Passo 2: Accendi l’auto robot, quindi scarica il codice python digitando il seguente comando nel tuo terminale Raspberry Pi:













 In questa lezione usiamo Python per programmare la nostra auto robot Raspberry Pi per guidare automaticamente lungo una linea nera in fondo bianco. Utilizzeremo cinque sensori di tracciamento IR per rilevare la linea.
In questa lezione usiamo Python per programmare la nostra auto robot Raspberry Pi per guidare automaticamente lungo una linea nera in fondo bianco. Utilizzeremo cinque sensori di tracciamento IR per rilevare la linea.