Dans cette leçon, nous utilisons Python pour programmer notre voiture robot Raspberry Pi afin qu’elle roule automatiquement le long d’une ligne noire sur fond blanc. Nous utiliserons cinq capteurs de suivi IR pour détecter la ligne.
Vous apprendrez comment Python lit les données numériques des broches GPIO.
Non.
Image
Appareil
Qté.
Accessoires
Lien
1
Module de capteur de suivi
1
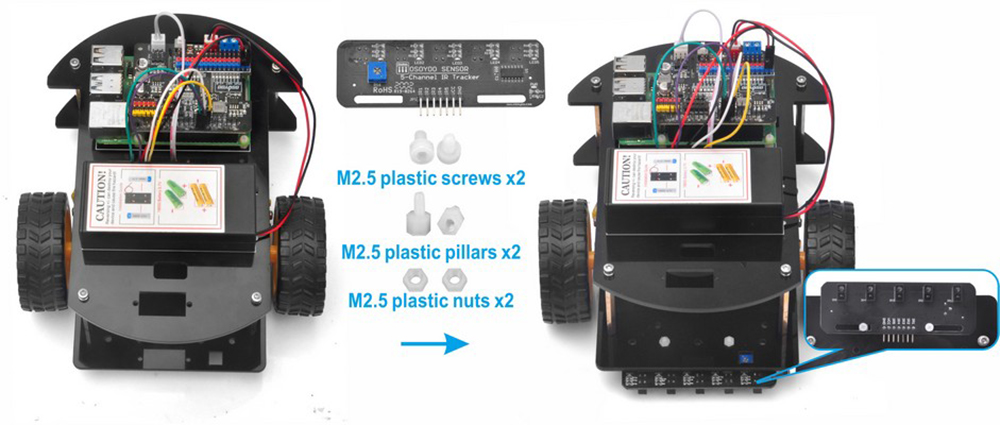
M2.5 Vis en plastique x 2
M2.5 Écrou en plastique x2
M2.5 Pilier en plastique x 2
Étape 2 : Installez des modules de capteurs de suivi sous le châssis inférieur de la voiture avec des vis en plastique M2.5 2pcs, des piliers en plastique M2.5 et des écrous en plastique M2.5.
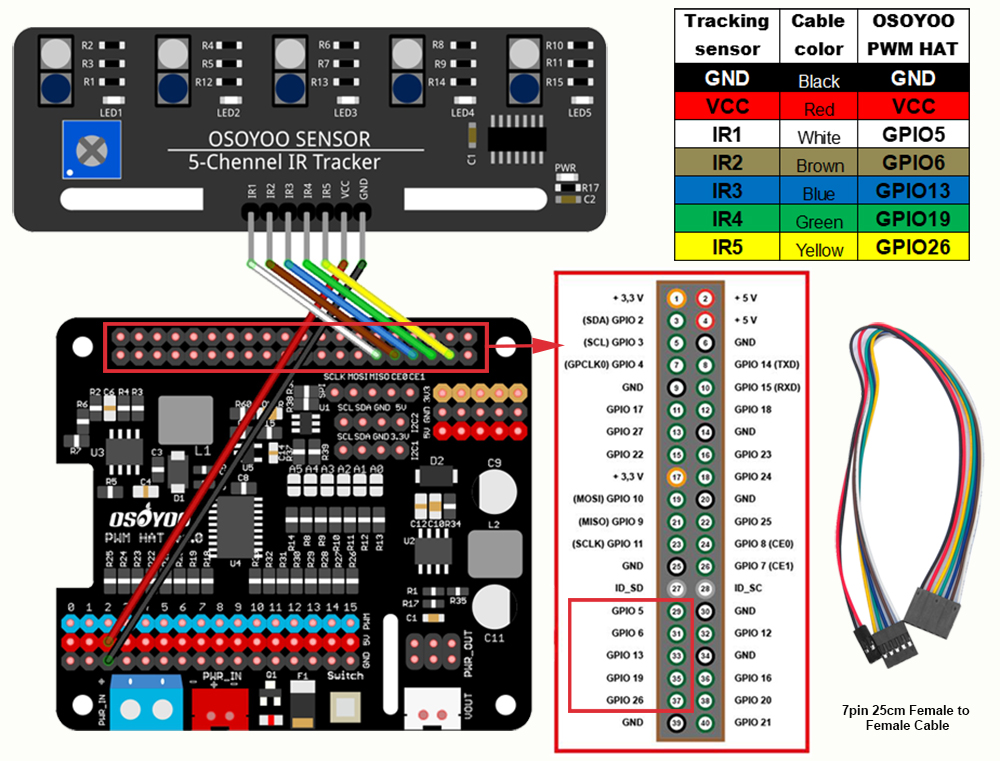
Étape 1: Connectez la broche GND-VCC du module de capteur de suivi à OSOYOO PWM HAT avec un câble femelle à femelle à 7 broches de 25 cm, comme le montre la photo suivante (rappelez-vous: NE PAS retirer les fils existants installés dans la leçon 1):
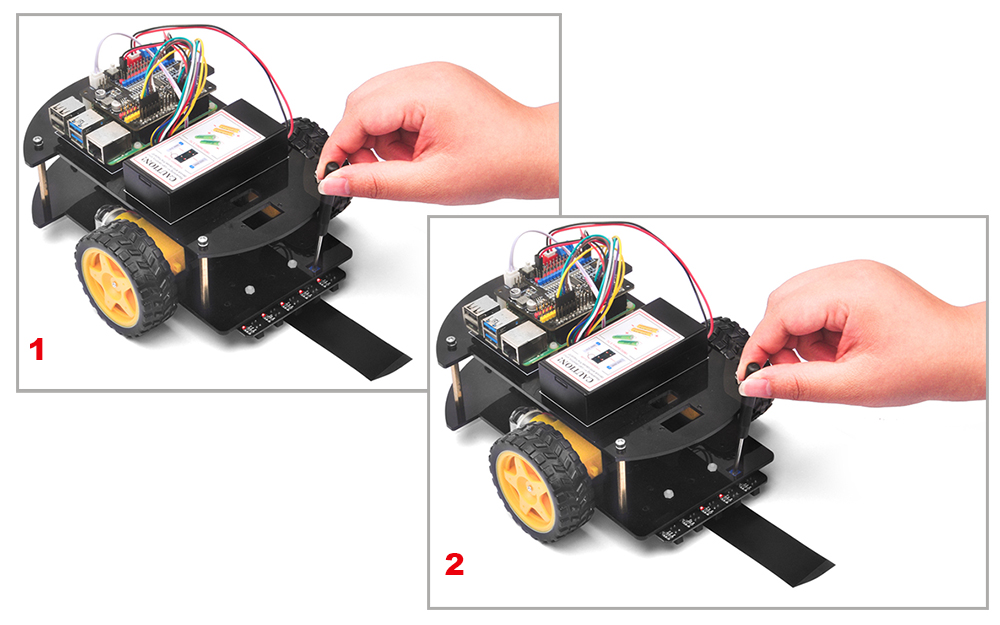
Étape 2: Ajustez la sensibilité des modules de capteurs de suivi.
Allumez la voiture, préparez une ligne de piste noire sur fond blanc et allumez la voiture.
Placez la voiture sur la piste noire et le sol blanc à plusieurs reprises pour ajuster la sensibilité du module de suivi.
Veuillez régler le potentiomètre sur le capteur de suivi et assurez-vous que le voyant correspondant sera allumé lorsque le capteur de suivi est sur le noir, et le voyant correspondant sera éteint lorsque le capteur de suivi est sur blanc.
Étape 1: Assurez-vous d’avoir installé rpi.gpio, la bibliothèque adafruit-pca9685 et activez I2C dans la leçon 1.
Étape 2: Allumez la voiture robotisée, puis téléchargez le code python en tapant la commande suivante dans votre terminal Raspberry Pi:













 Dans cette leçon, nous utilisons Python pour programmer notre voiture robot Raspberry Pi afin qu’elle roule automatiquement le long d’une ligne noire sur fond blanc. Nous utiliserons cinq capteurs de suivi IR pour détecter la ligne.
Dans cette leçon, nous utilisons Python pour programmer notre voiture robot Raspberry Pi afin qu’elle roule automatiquement le long d’une ligne noire sur fond blanc. Nous utiliserons cinq capteurs de suivi IR pour détecter la ligne.