Modello 2021006600
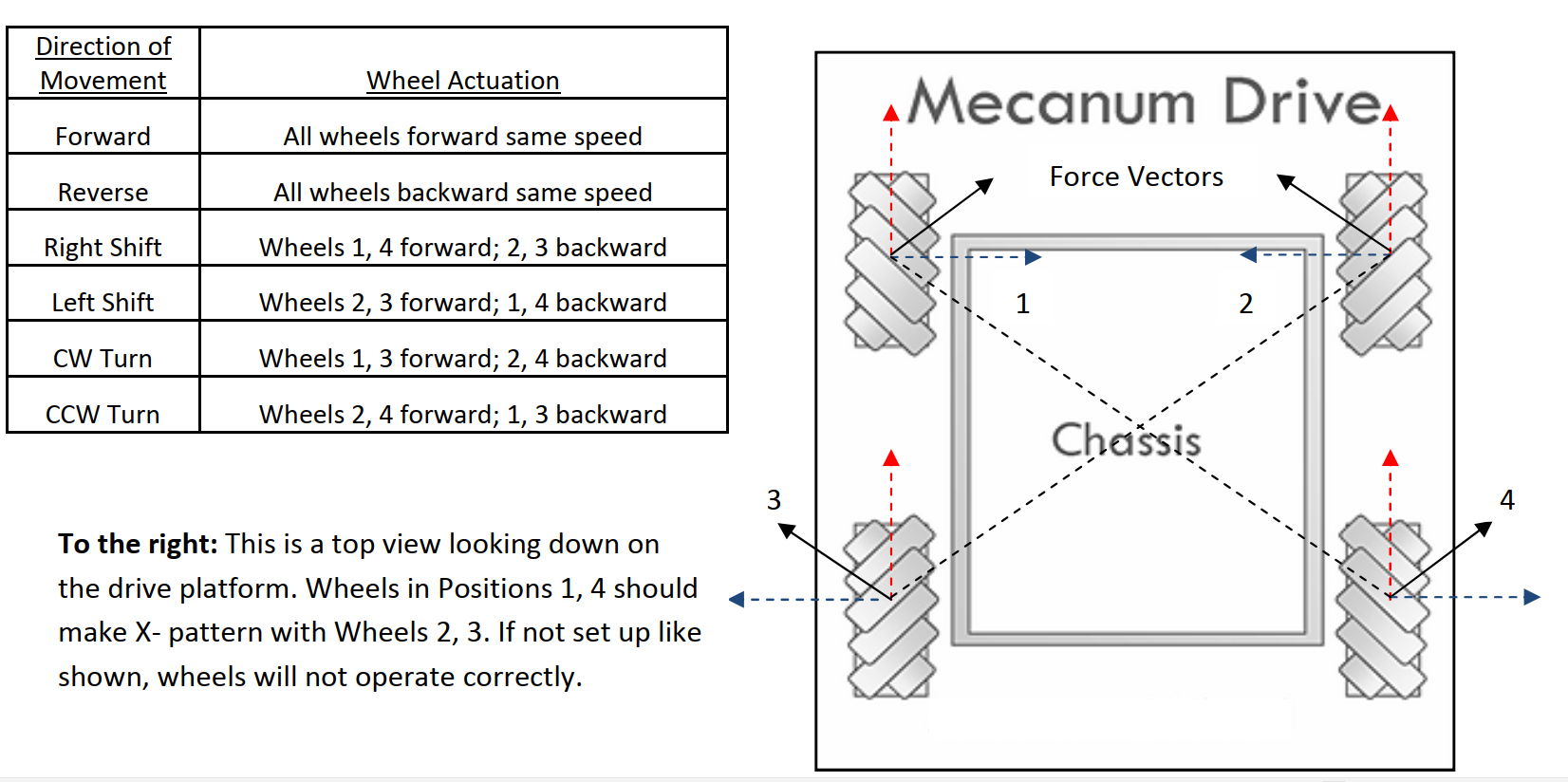
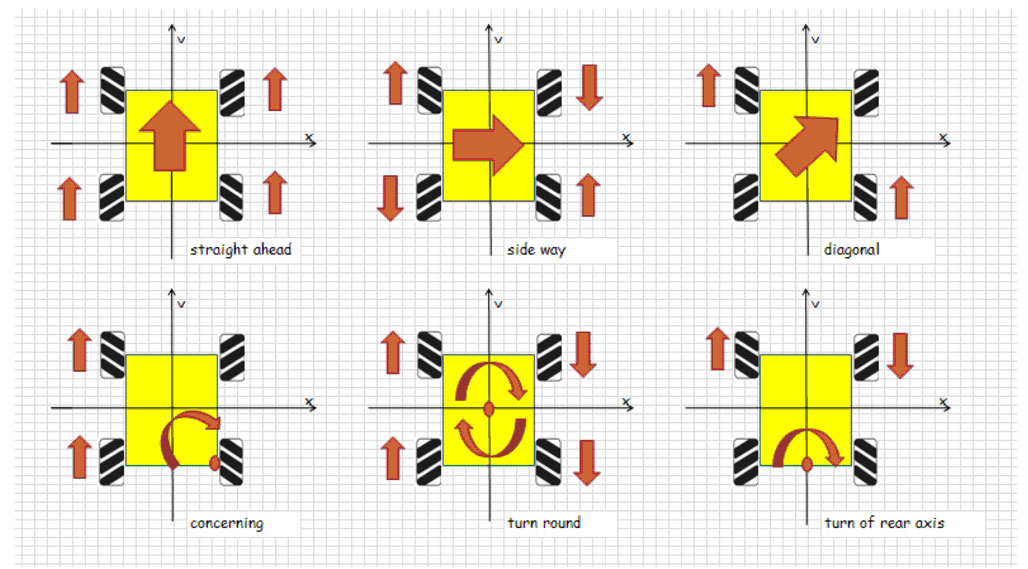
La ruota omnidirezionale Mecanum è una ruota molto interessante che consente al robot di effettuare movimenti omnidirezionali (ad esempio, spostamento parallelo a sinistra e a destra).
In questo progetto, mostreremo come utilizzare Raspberry Pi per controllare un’auto robot con ruote Mecanum OSOYOO, eseguendo movimenti di base come avanzare, retrocedere, girare a sinistra, girare a destra, spostamento parallelo a sinistra e spostamento parallelo a destra.
Questa lezione guida anche nell’assemblaggio del telaio dell’auto e nel collegamento di Raspberry Pi e OSOYOO PWM HAT alla scheda OSOYOO Model Y. Questa configurazione serve come base per le lezioni successive.
Componenti inclusi:
Telaio auto robotica con ruote Mecanum OSOYOO x1
Ruote e motori OSOYOO x4 (ruote sinistra x2 / ruote destra x2)
Scheda Raspberry Pi 4/5 x1 (non inclusa nel kit)
Shield OSOYOO PWM HAT x1
Scheda driver motori OSOYOO Model Y x1
Voltmetro OSOYOO x1
Portabatterie OSOYOO x1
Cavi jumper femmina-femmina a 6 pin OSOYOO x2
Cavo jumper femmina-femmina a 3 pin OSOYOO x1
Cavo femmina-femmina PnP a 2 pin XH2.54 OSOYOO x1
Batterie 18650 (3.7V) x2
Caricabatterie x1
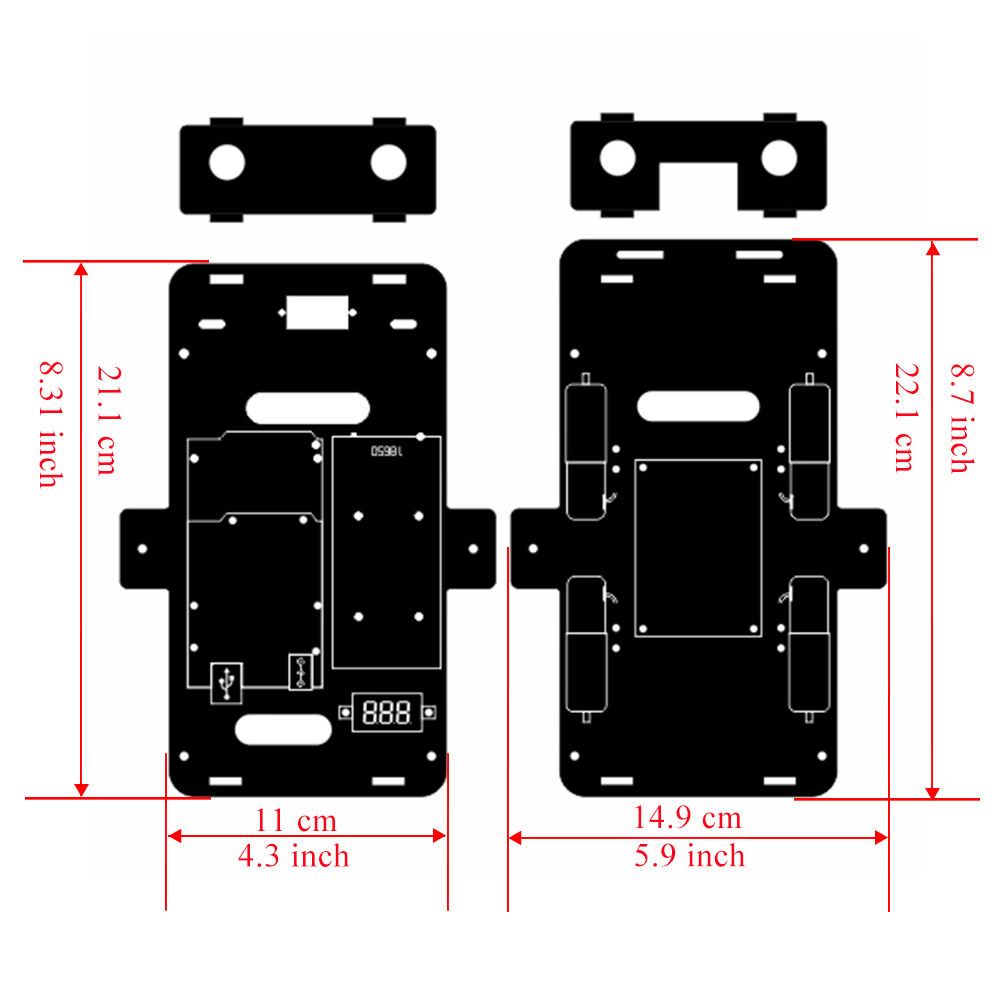
Dimensioni
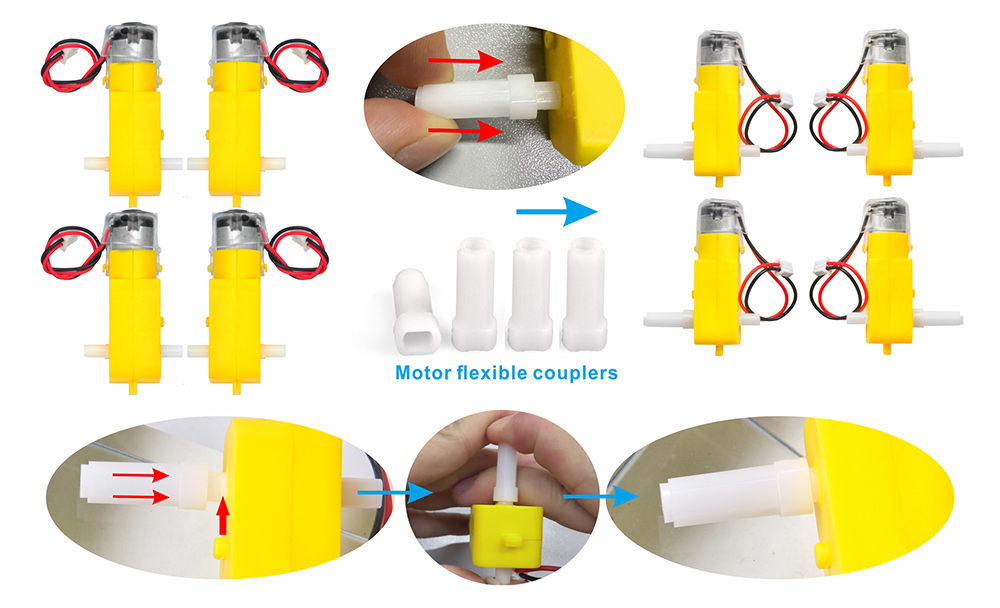
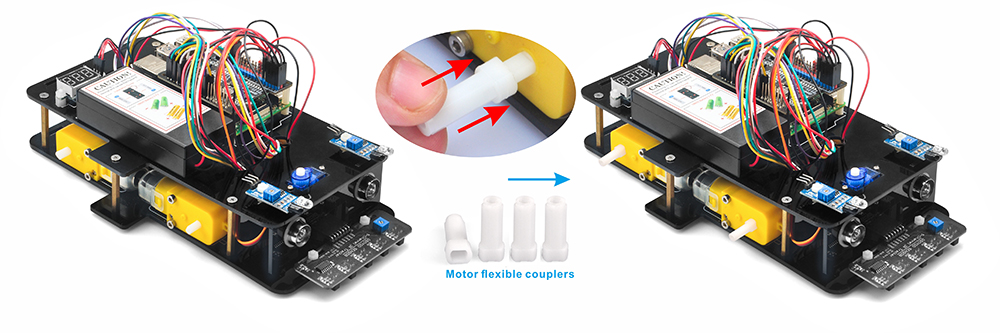
0) Installare l’accoppiamento bianco sul motore giallo seguendo i passaggi mostrati nell’immagine, assicurandosi che l’accoppiamento sia inserito completamente fino alla base.
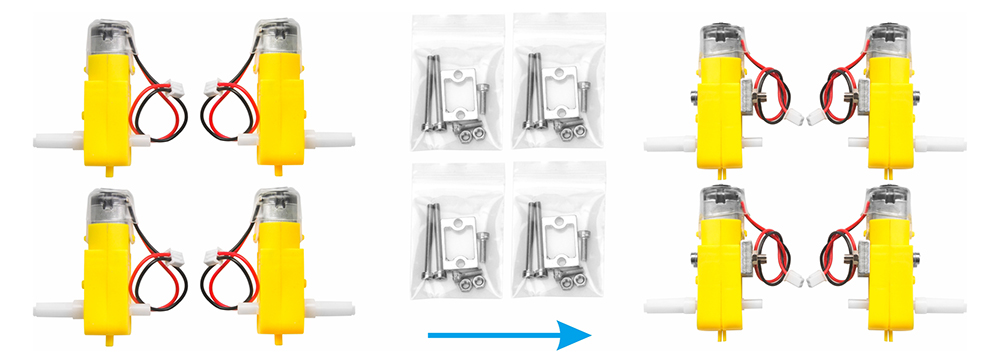
1) Fissare i 4 motori utilizzando i supporti metallici come mostrato. (Assicurarsi che l’orientamento del motore sia corretto prima di installare i supporti metallici.)
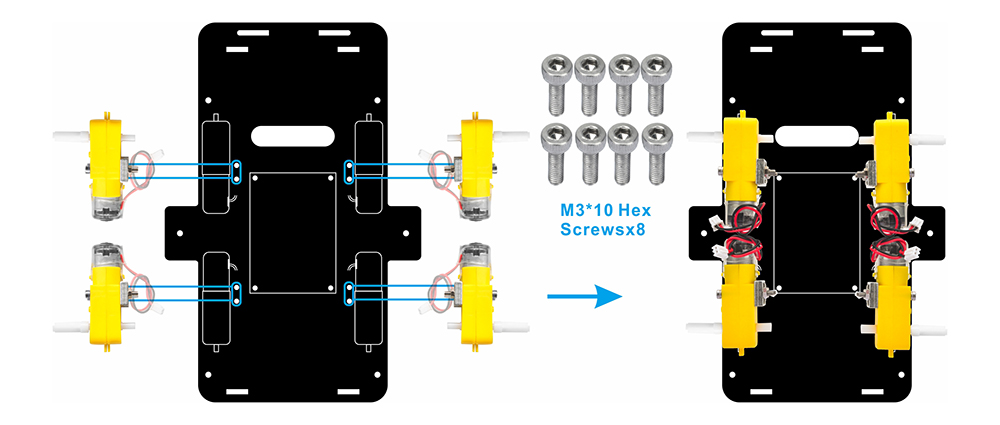
2) Fissare i 4 motori al telaio inferiore dell’auto utilizzando viti esagonali M3*10 e un cacciavite esagonale, come mostrato nell’immagine. (Le viti necessarie per questo passaggio sono incluse nella confezione dei supporti metallici per motori.)
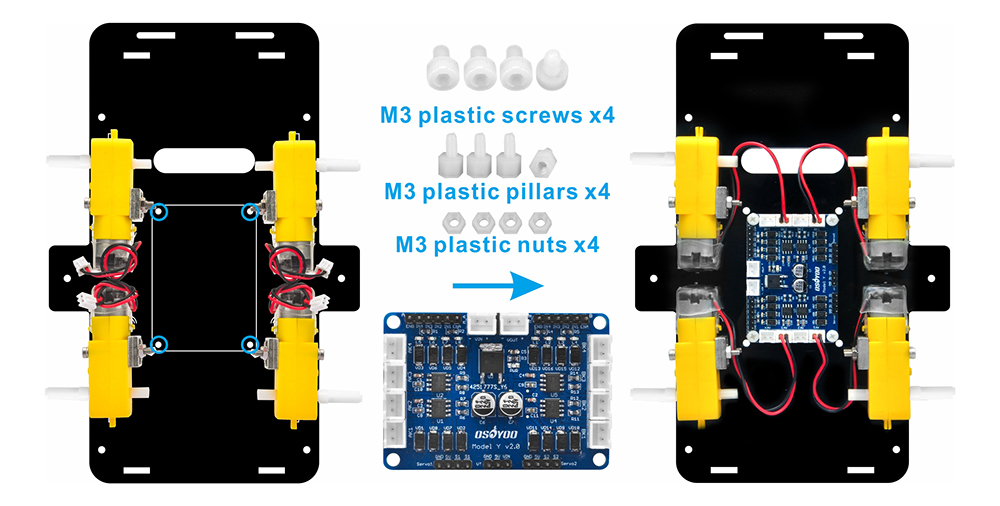
3)Montare la scheda driver OSOYOO Model Y sul telaio inferiore dell’auto utilizzando 4 viti plastiche M3, colonnine plastiche e dadi plastici (si consiglia di installare le colonnine plastiche con l’estremità maschio rivolta verso il basso). Quindi, collegare i 4 motori alle prese K1 e K3 sulla scheda driver motori Model Y, come mostrato nello schema.
(Assicurarsi che la scheda driver OSOYOO Model Y sia installata nel corretto orientamento.)
Esistono due modalità di installazione per le colonnine plastiche: A. Estremità maschio della colonnina rivolta verso il basso. B. Estremità maschio della colonnina rivolta verso l’alto.
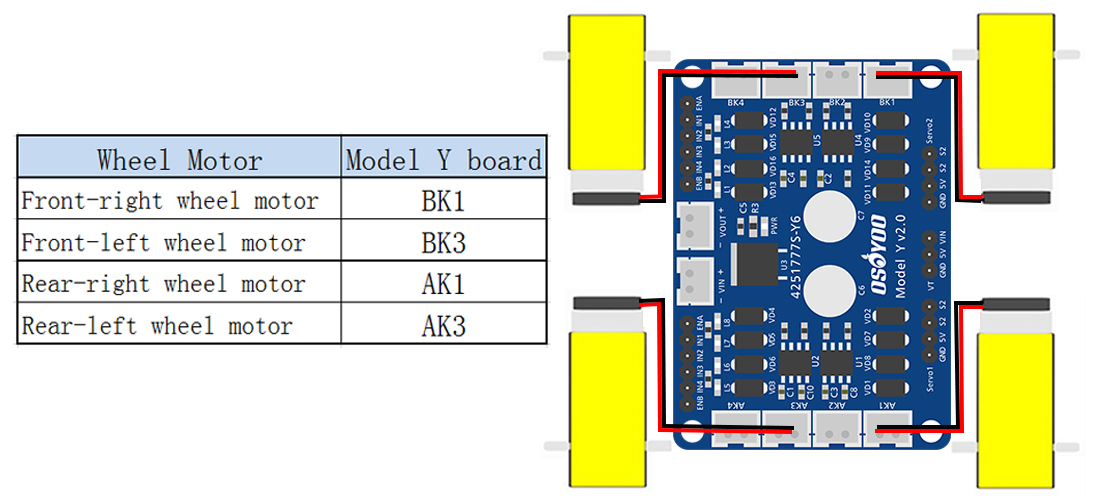
4) Collegare i 4 motori alle prese K1 e K3 sulla scheda driver motori Model Y, come mostrato nello schema.
Informazioni su Model Y V2.0 H-Bridge 4-Channel Motor Driver:
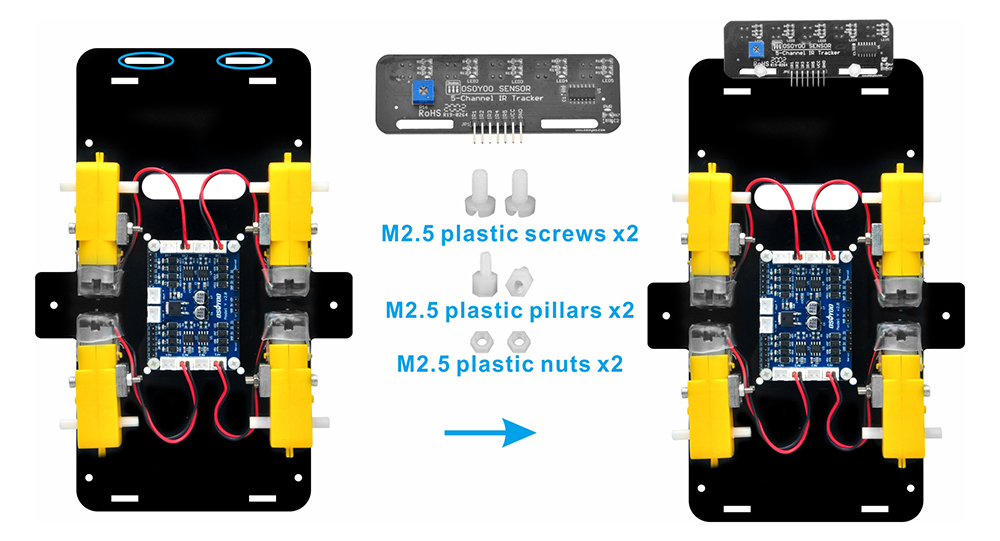
5) Fissare il modulo sensore di tracciamento al telaio inferiore utilizzando due viti plastiche M3, due colonnine plastiche M3 e due dadi plastici M3 (si consiglia di installare le colonnine plastiche con l’estremità maschio rivolta verso l’alto). Assicurarsi che il sensore sia saldamente fissato e correttamente allineato per un funzionamento preciso.
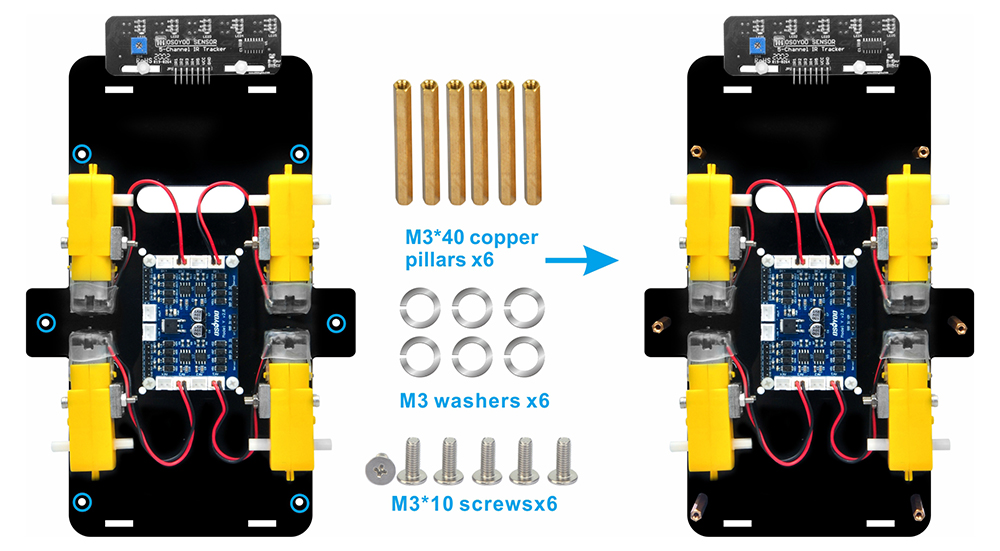
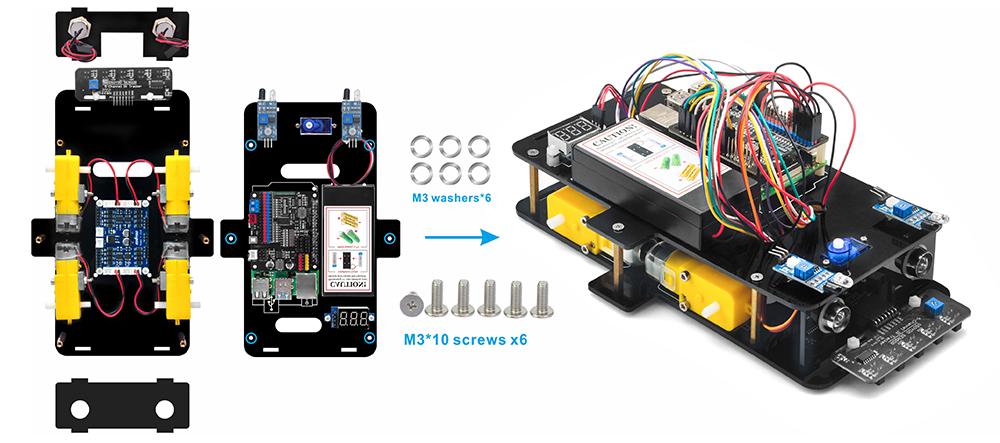
6) Avvitare sei colonnine di rame M3*40 al telaio inferiore utilizzando sei viti M3*10 e sei rondelle M3. Assicurarsi che le colonnine siano saldamente fissate per fornire un supporto stabile al telaio superiore.
Infilare la rondella sulla vite: una rondella distribuisce la pressione della vite e migliora la stabilità quando si fissano le viti nelle colonnine metalliche.
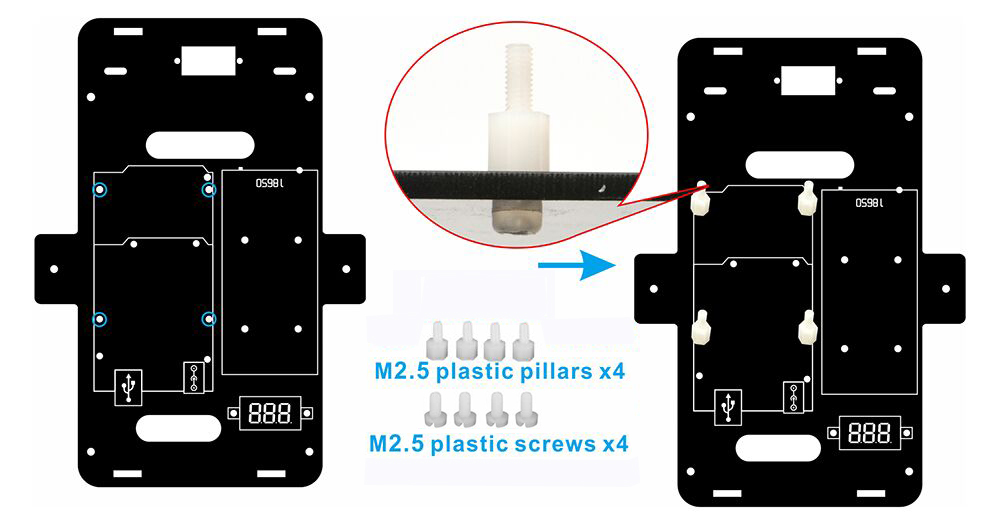
7) Il telaio in acrilico ha fori dedicati per l’installazione della scheda Raspberry Pi. Installare colonnine plastiche bianche M2.5*5+6 e viti M2.5*5 su questi 4 fori, come mostrato nella figura seguente.
.
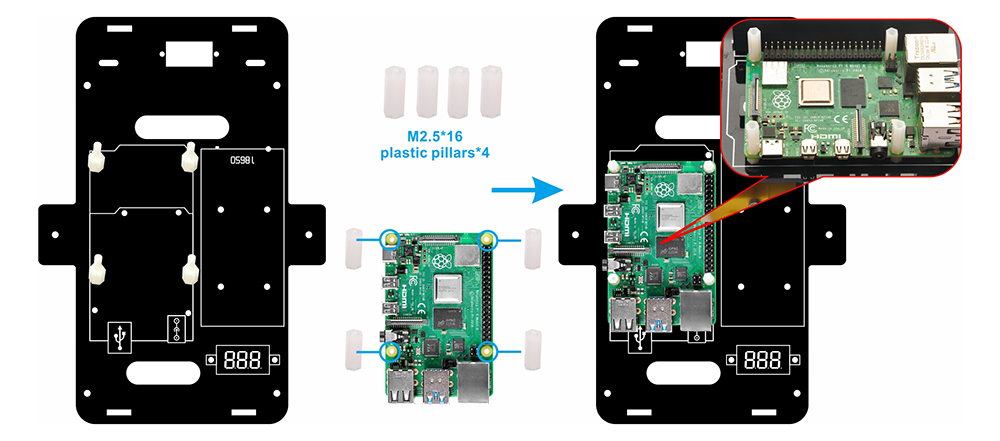
8) Fissare la scheda Raspberry Pi 4 (non inclusa nella confezione) al telaio superiore utilizzando quattro colonnine plastiche M2.5×16.
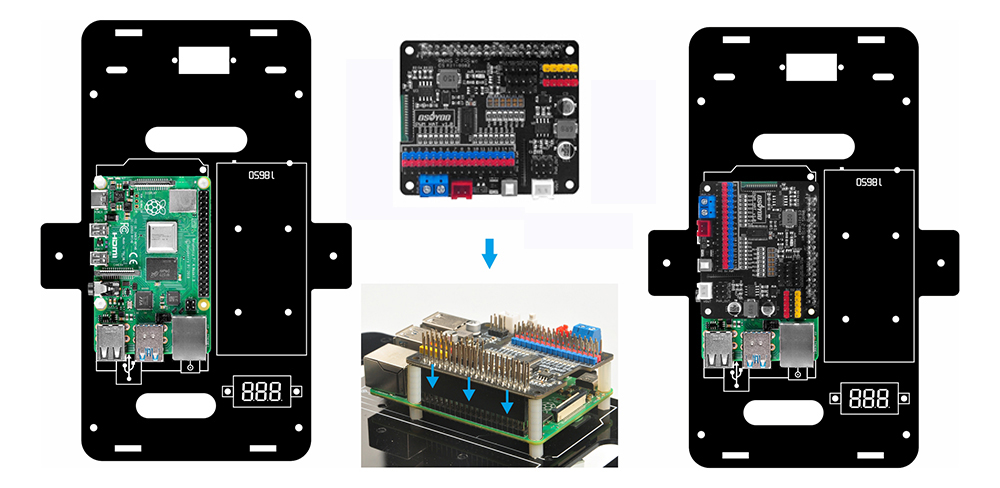
9) Inserire lo shield OSOYOO PWM HAT sulla scheda Raspberry Pi.
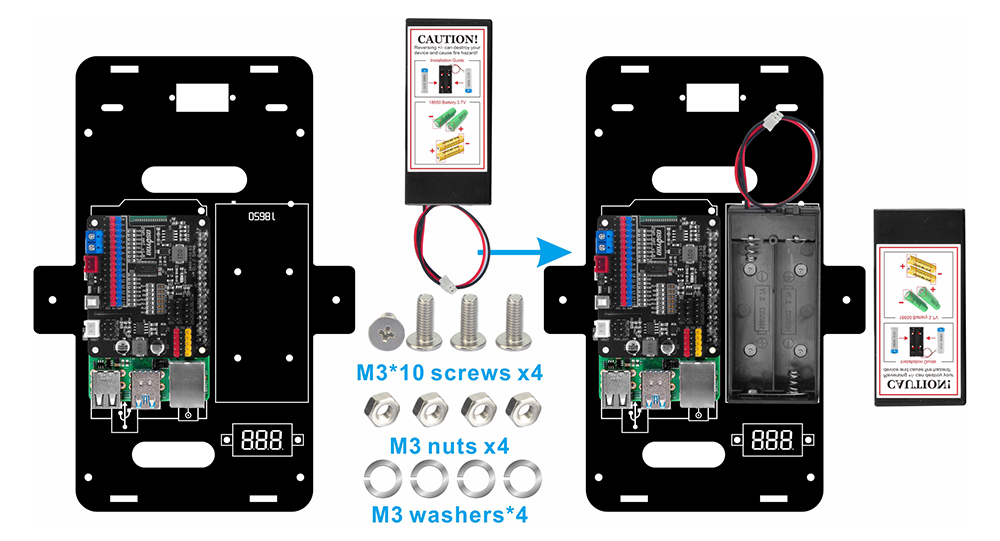
10)Utilizzare quattro viti M3*10, quattro dadi M3 e quattro rondelle M3 per fissare il portabatterie ai segni designati sul telaio superiore.
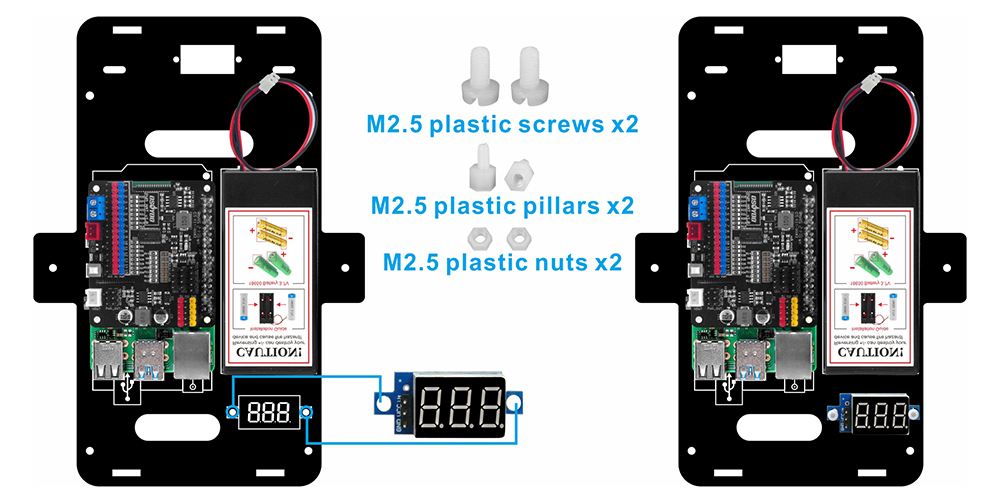
11) Fissare il voltmetro ai segni designati sul telaio inferiore utilizzando due viti plastiche M2.5, due colonnine plastiche M2.5 e due dadi plastici M2.5. (Si consiglia di installare le colonnine plastiche con l’estremità maschio rivolta verso l’alto.)
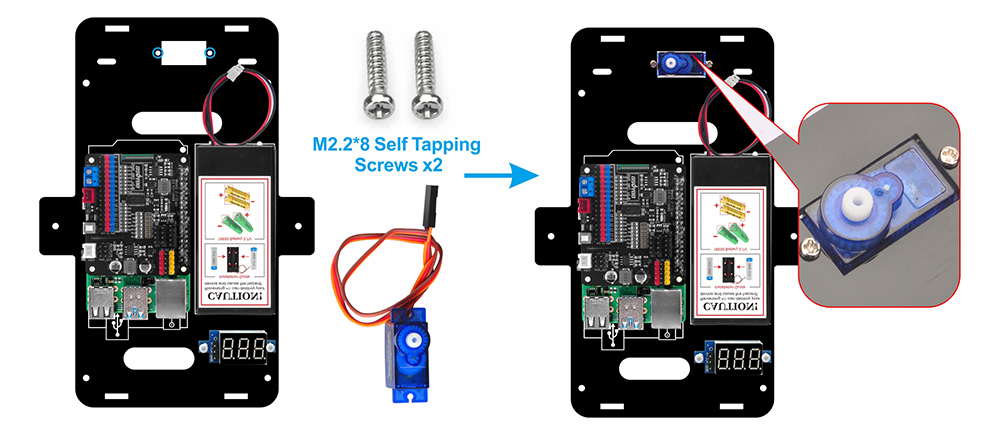
12) Utilizzando due viti autofilettanti M2.2*8, montare il servomotore SG90 nella parte anteriore del telaio superiore.
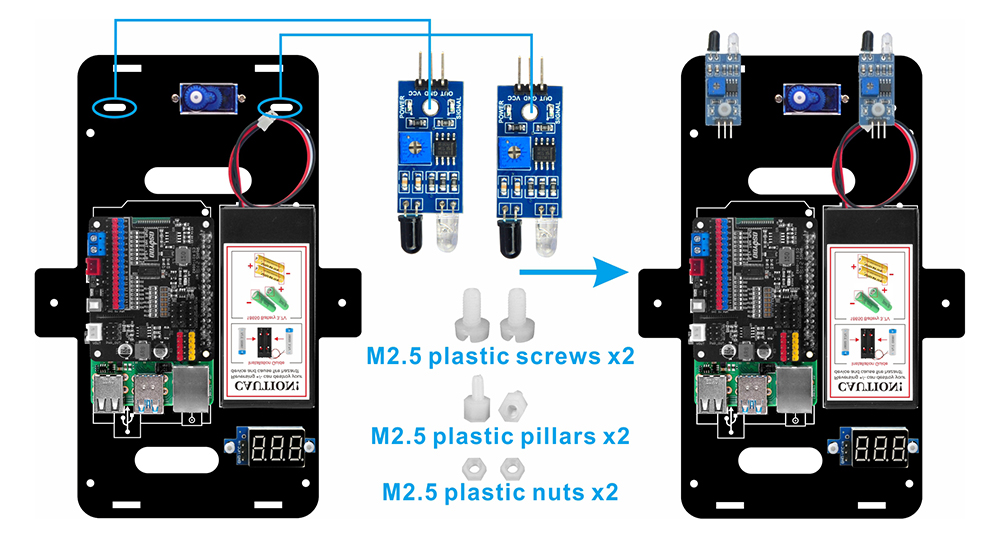
13)Fissare due sensori di distanza IR alla parte anteriore del telaio superiore utilizzando due viti plastiche M2.5, colonnine plastiche M2.5 e dadi plastici M2.5. Per fissare saldamente i sensori, si consiglia di installare le colonnine plastiche con l’estremità maschio rivolta verso l’alto.
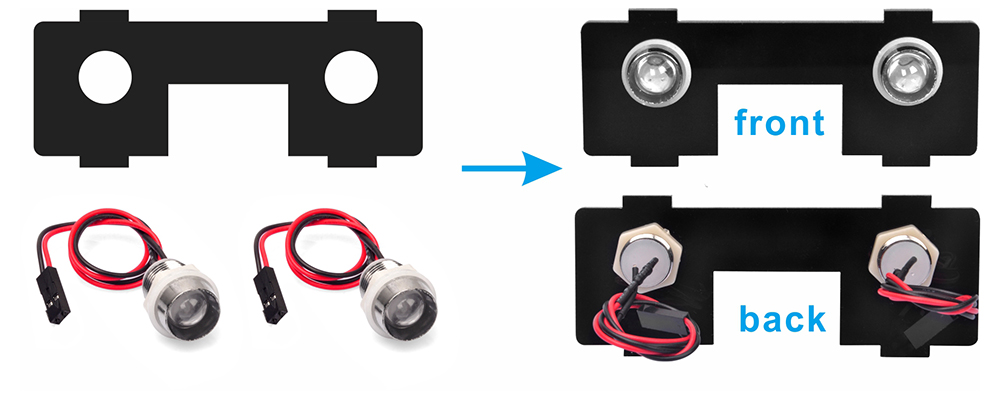
14)Montare due luci LED sulla barriera frontale, come mostrato nello schema.
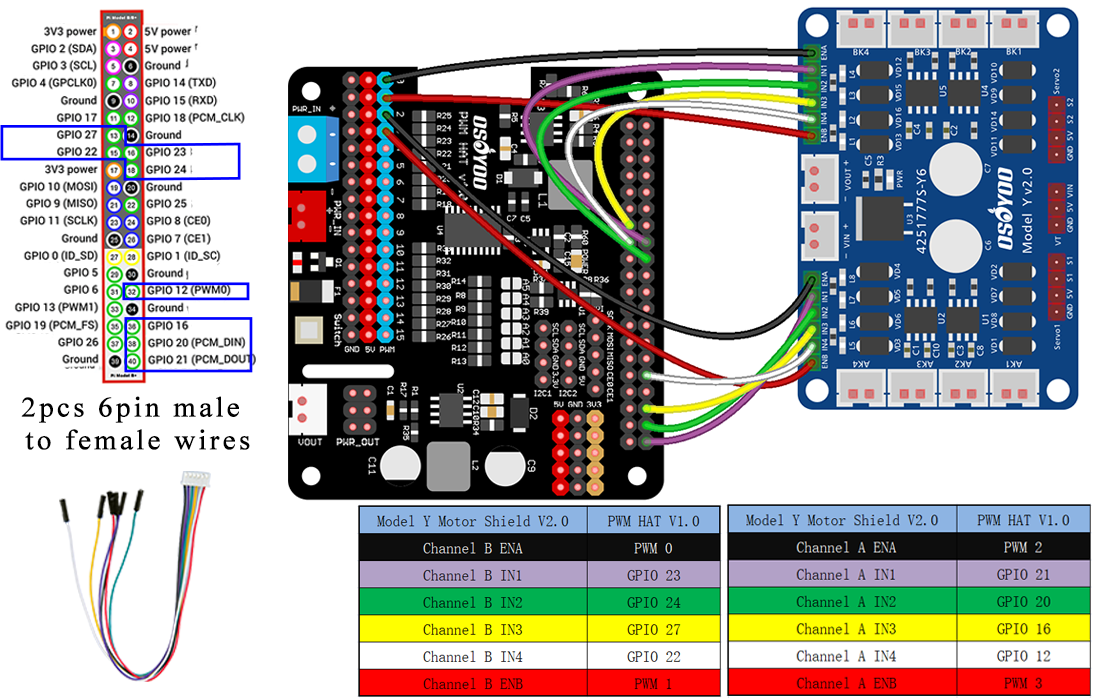
15) Collegare la scheda OSOYOO Model Y allo shield OSOYOO PWM HAT con 2 cavi jumper femmina-femmina a 6 pin come segue. I cavi a 6 pin nell’Area B devono passare attraverso il foro vicino al servomotore SG90, mentre gli altri cavi a 6 pin nell’Area A devono passare attraverso il foro vicino al voltmetro.
Attenzione:
Quando si inserisce/rimuove questo connettore a 6 pin nella presa maschio a 6 pin del Model Y, afferrare il supporto di plastica per eseguire l’operazione. Non tirare mai i cavi per estrarre il connettore dalla presa, altrimenti si danneggeranno i cavi.
16)
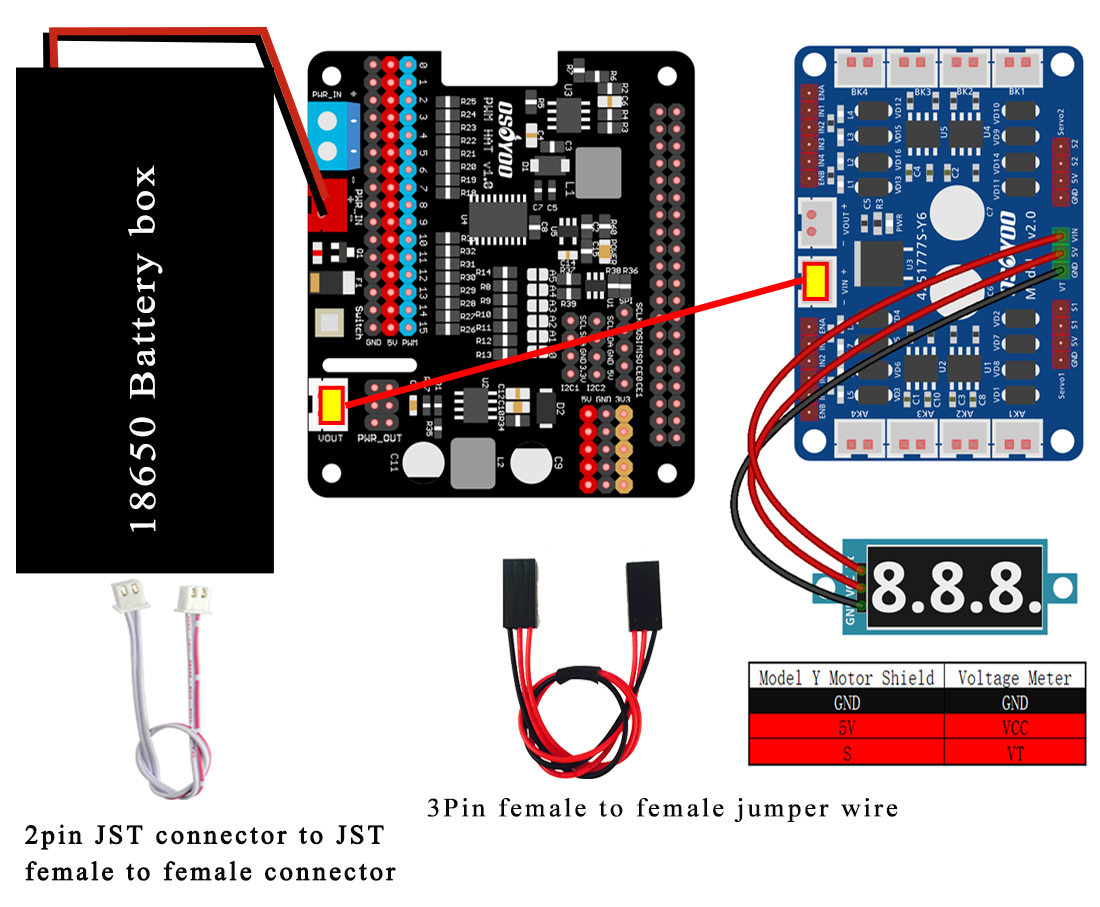
Collegare il voltmetro alla scheda OSOYOO Model Y con un cavo jumper femmina-femmina a 3 pin, come mostrato nello schema di collegamento.
Collegare la presa 12V-GND della scheda OSOYOO Model Y alla presa VIN-GND con un cavo PnP OSOYOO a 2 pin da 20 cm, come mostrato nel grafico seguente.
Collegare il portabatterie alla presa VIN-GND dello shield OSOYOO Uart WiFi secondo lo schema di collegamento sottostante.
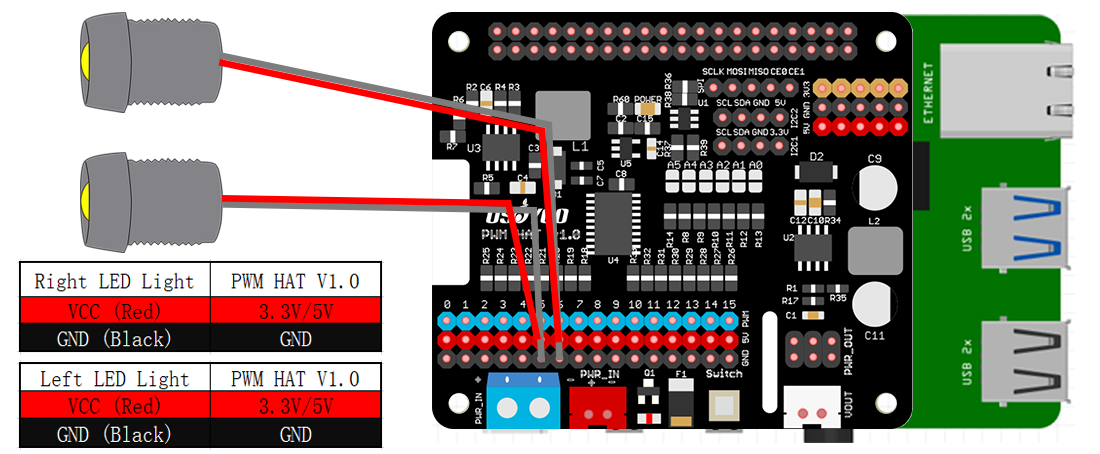
17)Montare 2 luci LED sul diaframma trasversale anteriore.
Collegare i fili rossi (VCC) delle luci LED ai pin 3.3V o 5V, e i fili neri (GND) ai pin GND sullo shield OSOYOO PWM HAT.
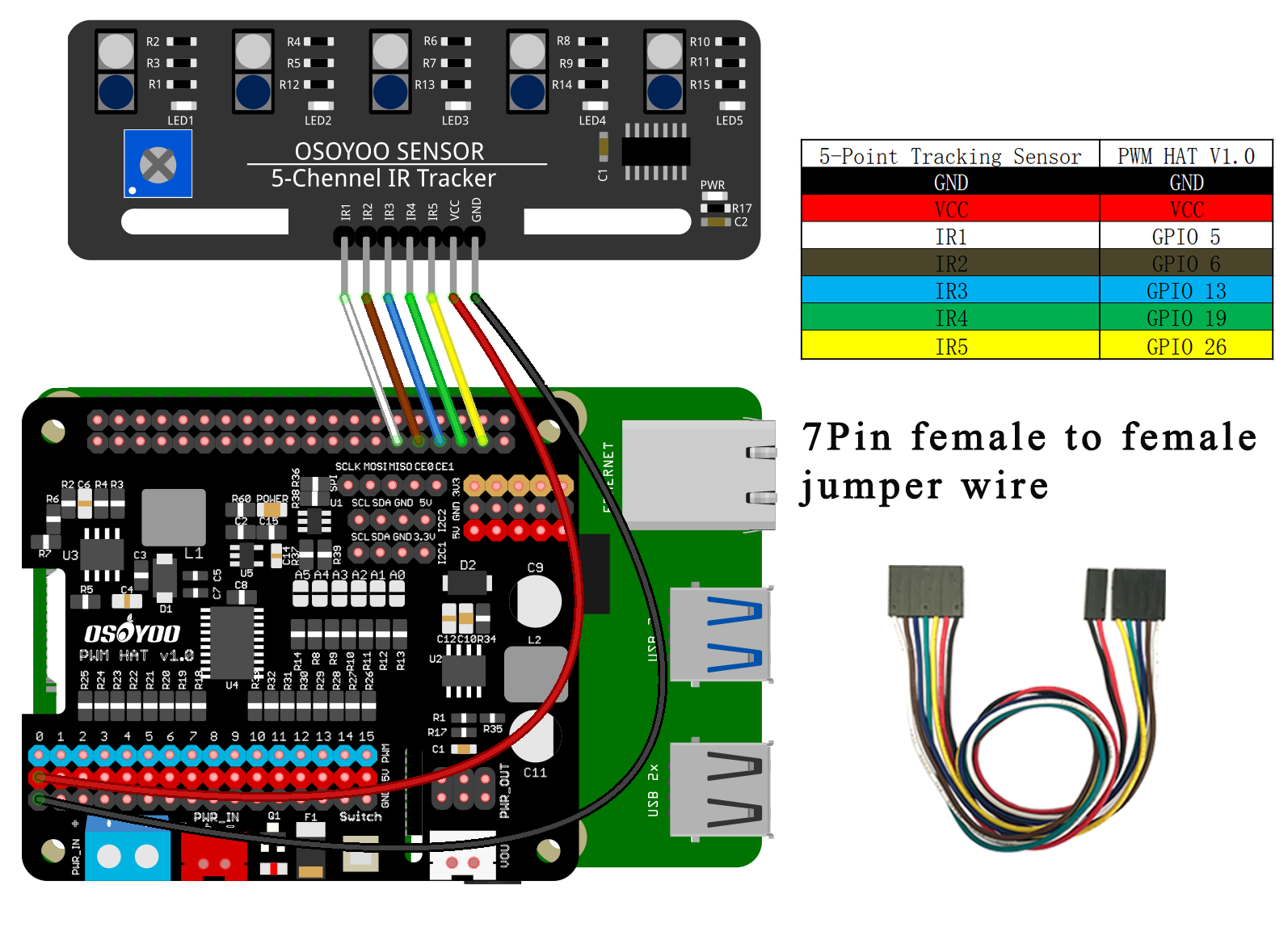
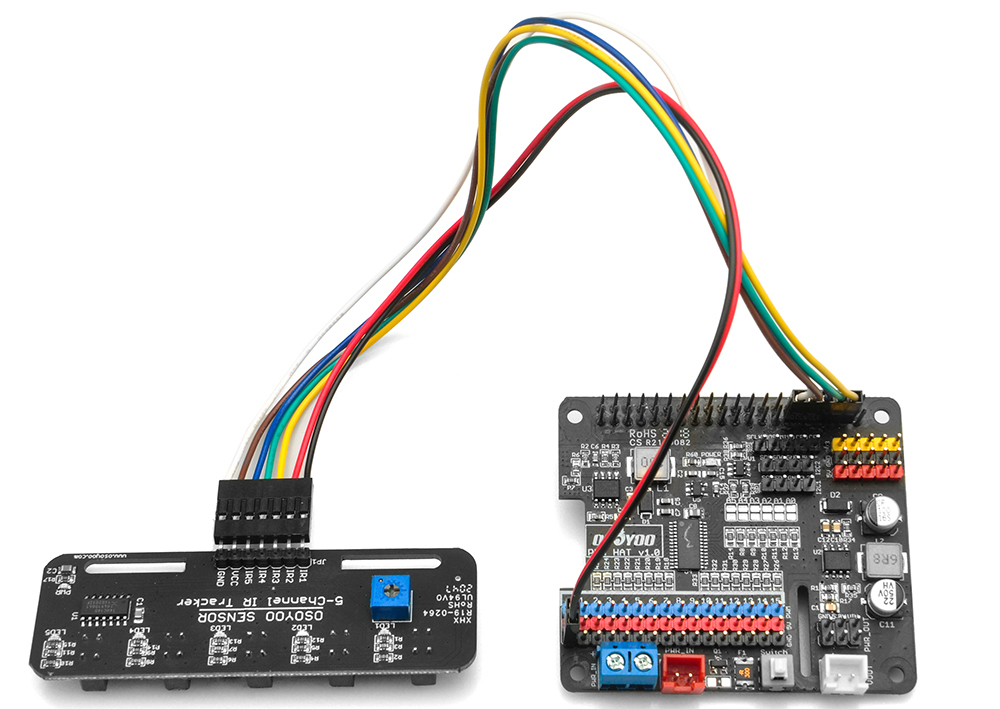
18)Collegare il pin GND-VCC del modulo sensore di tracciamento ai pin GND-5V dello shield OSOYOO PWM HAT; collegare i pin IR1, IR2, IR3, IR4, IR5 ai pin GPIO5, GPIO6, GPIO13, GPIO19, GPIO26 con un cavo femmina-femmina a 7 pin da 25 cm, come mostrato nella foto seguente.
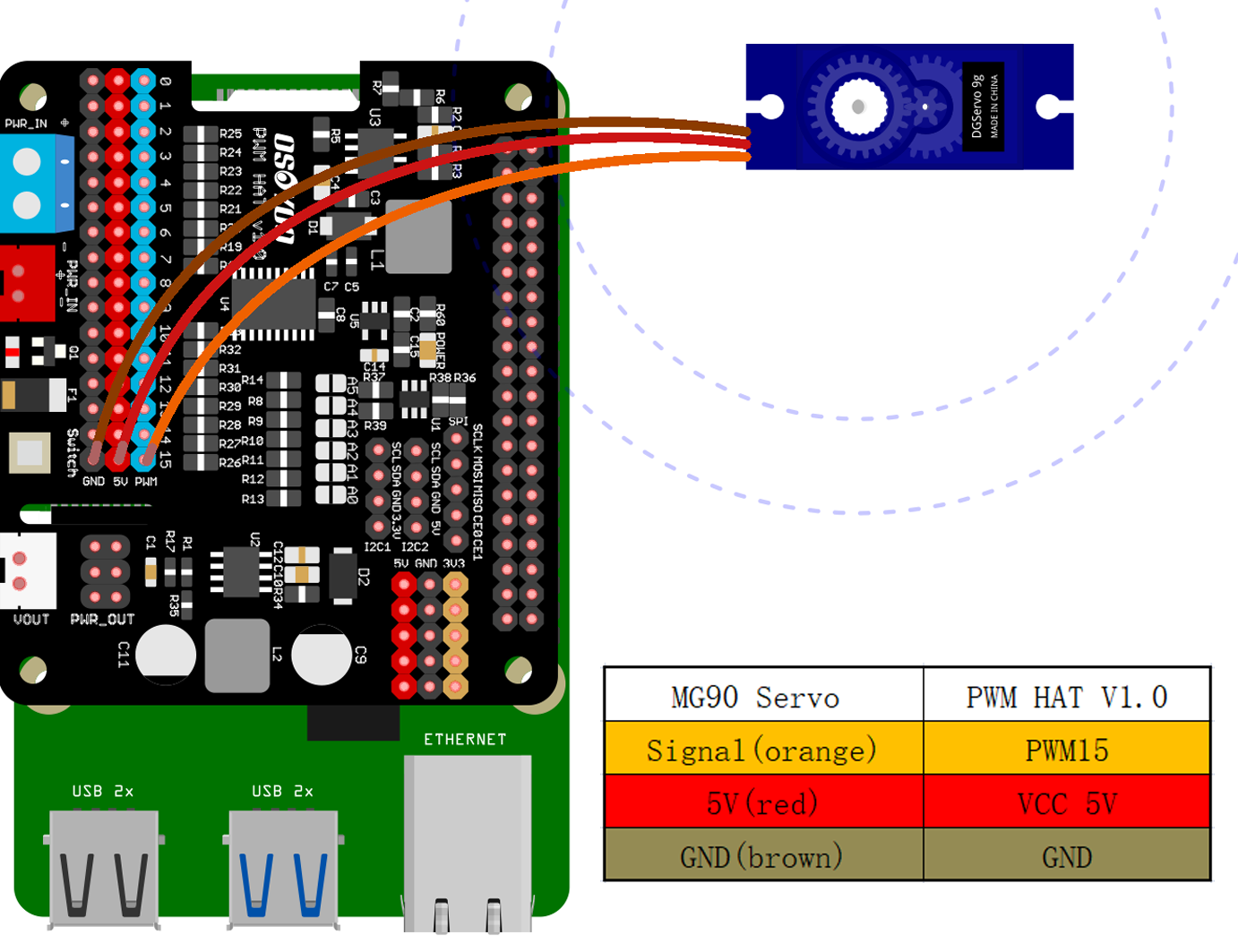
19) Collegare il servomotore SG90, la scheda OSOYOO Model Y e lo shield OSOYOO PWM HAT come mostrato nello schema seguente.
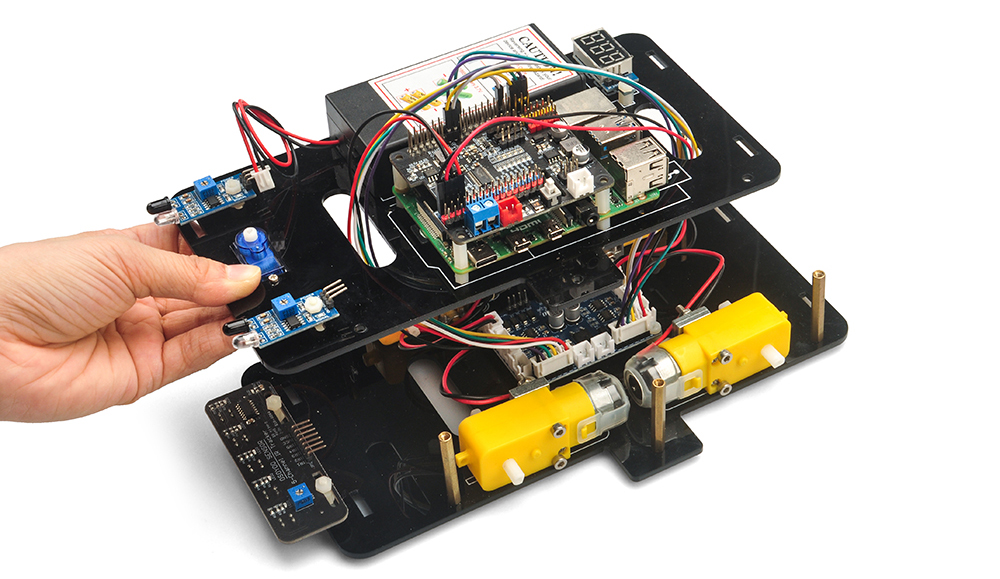
20) Assicurarsi che tutti i collegamenti elettrici necessari siano completati prima di assemblare il telaio superiore e inferiore. Fissare il telaio superiore al telaio inferiore con 6 viti esagonali M3*10.
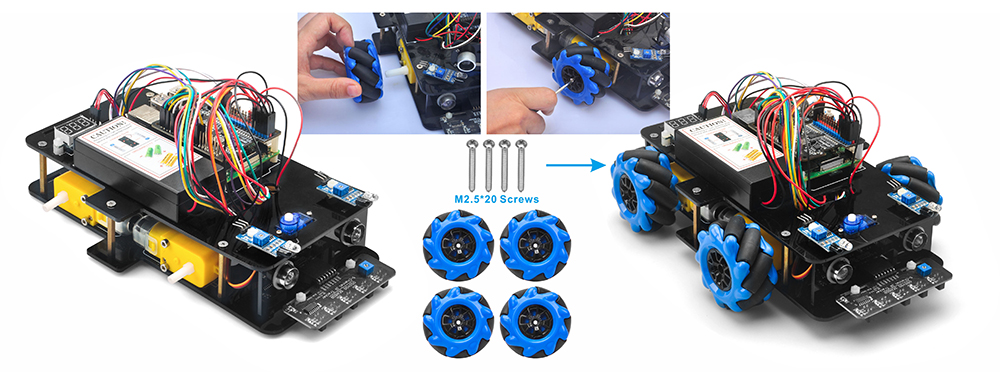
21) Installare 4 giunti flessibili e le ruote sui motori con 4 viti M2.5X20 o M2.6×20.
22)Installare 4 ruote sui motori con 4 viti M2.5X20 o M2.6×20.
Nota: Esistono due tipi di ruote. Posizionarle in modo che i rulli siano inclinati verso il centro dell’auto quando visti dall’alto.
Esistono due tipi di ruote Mecanum: ruote Mecanum sinistra e destra; la differenza tra loro è l’orientamento dei rulli. Per una ruota Mecanum di tipo A, come mostrato di seguito, i rulli sono orientati dall’angolo in basso a destra all’angolo in alto a sinistra. I rulli per le ruote di tipo B sono installati in modo opposto.
Una configurazione corretta richiede che ciascuna delle quattro ruote sia posizionata come mostrato di seguito, dove l’asse di rotazione del rullo superiore di ogni ruota punta verso il centro della piattaforma. Si noti che tutte le analisi dinamiche e i codici pre-scritti sono basati su questa configurazione.
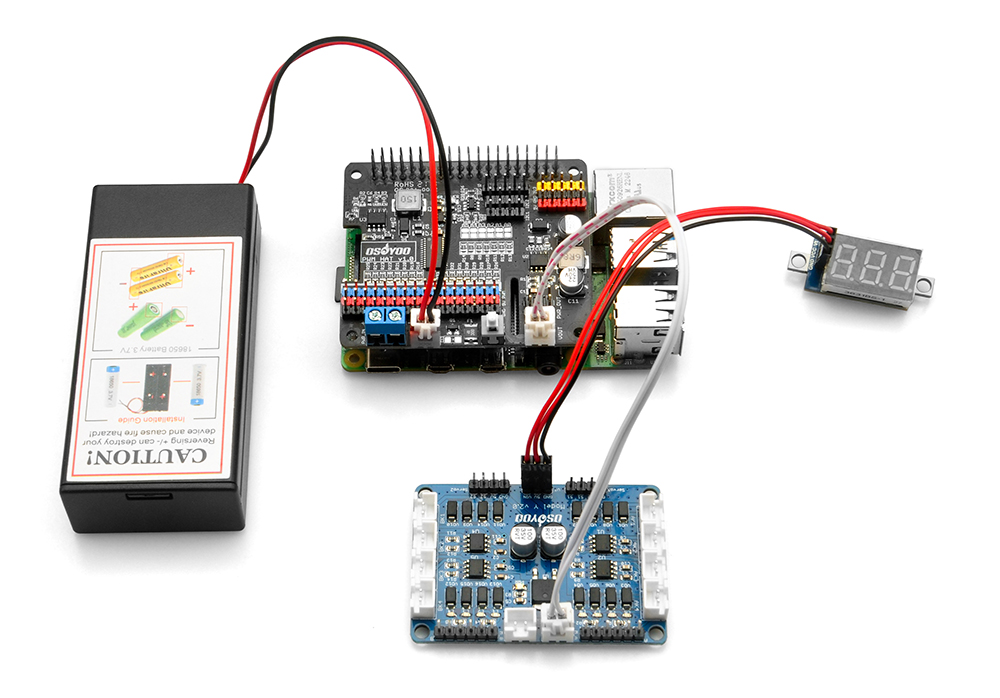
L’installazione dell’hardware è quasi completa. Prima di inserire le batterie 18650 nell’apposito alloggiamento, è necessario caricare ed eseguire il codice di esempio sul Raspberry Pi. Nella prossima lezione spiegheremo in dettaglio come caricare ed eseguire il codice di esempio sul Raspberry Pi.