Model 2021006600
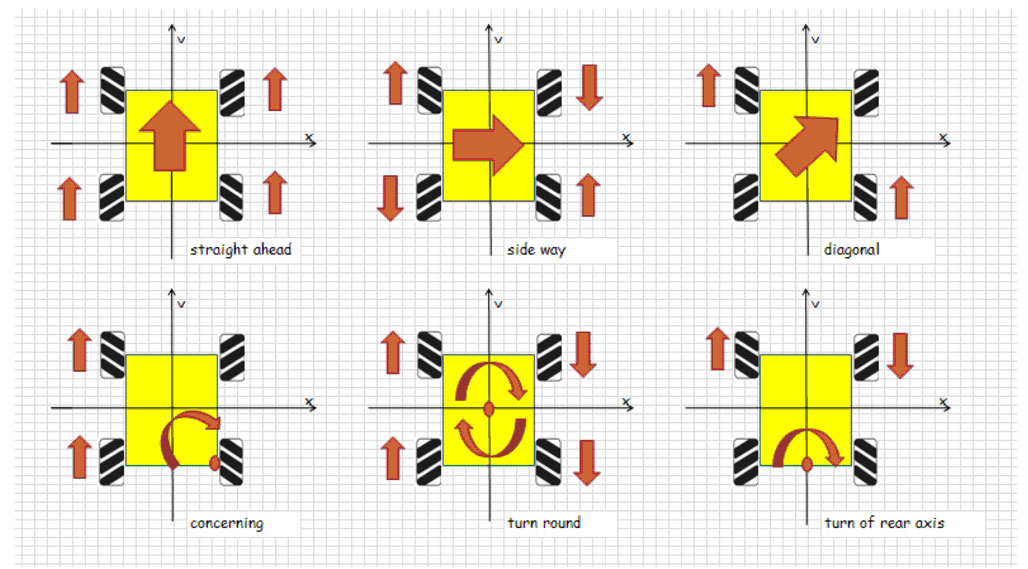
Das Mecanum-Allrichtungsrad ist ein faszinierender Radtyp, der es einem Roboterfahrzeug ermöglicht, sich in jede Richtung zu bewegen – einschließlich seitlicher Parallelverschiebungen nach links und rechts.
In diesem Projekt zeigen wir, wie man mit einem Raspberry Pi ein OSOYOO Mecanum-Rad-Roboterfahrzeug steuert und grundlegende Bewegungen ausführt: Vorwärts, rückwärts, links abbiegen, rechts abbiegen, parallele Linksverschiebung und parallele Rechtsverschiebung.
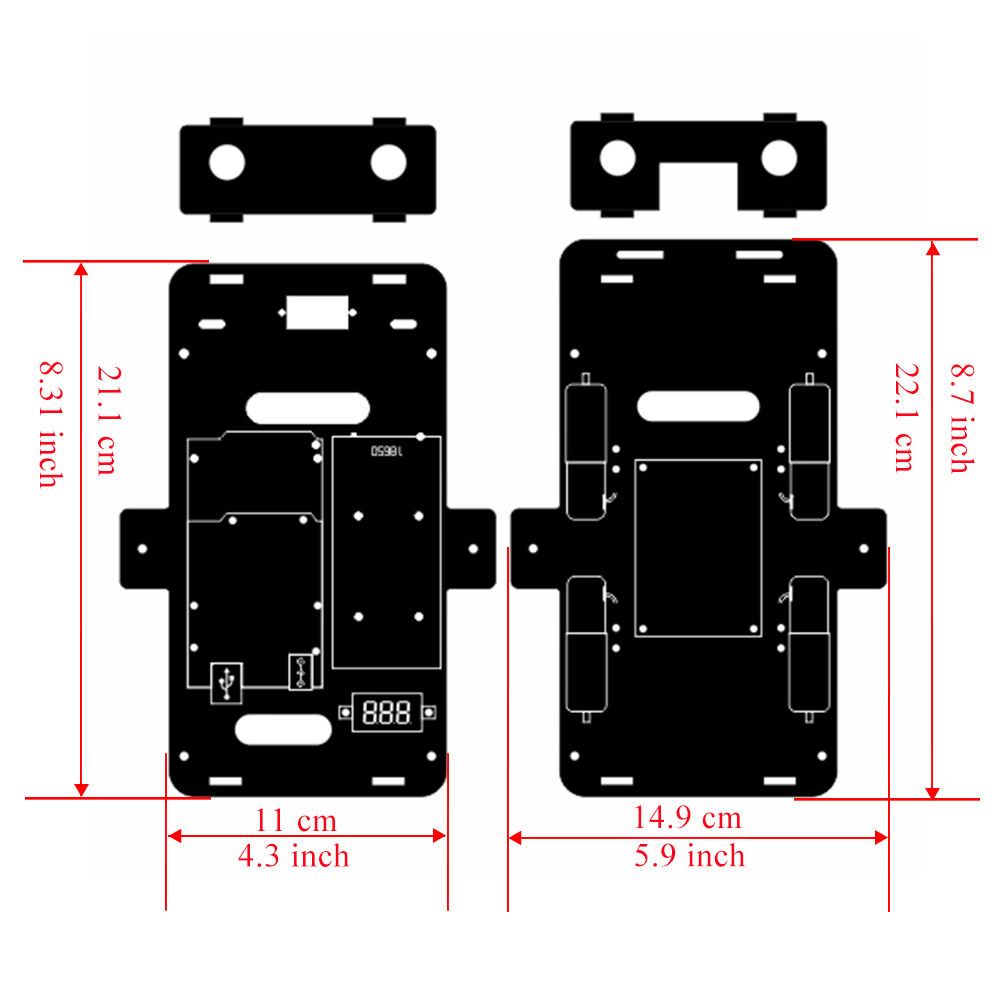
Diese Lektion führt dich außerdem durch den Zusammenbau des Fahrzeugchassis und die Verbindung des Raspberry Pi und des OSOYOO PWM HAT mit dem OSOYOO Model Y Board. Diese Konfiguration bildet die Grundlage für alle folgenden Lektionen.
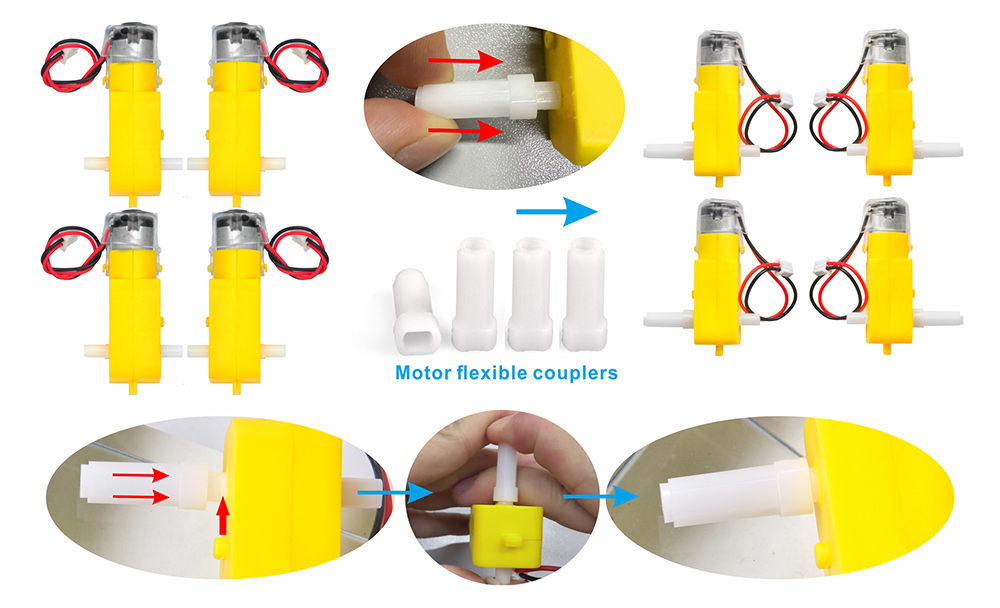
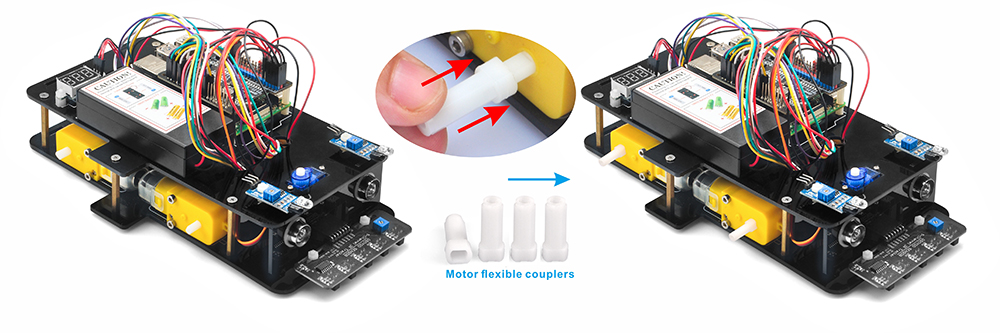
0) Setze die weiße Kupplung gemäß den Schritten in der Abbildung auf den gelben Motor. Achte darauf, dass die Kupplung vollständig bis zum Anschlag eingeschoben ist.
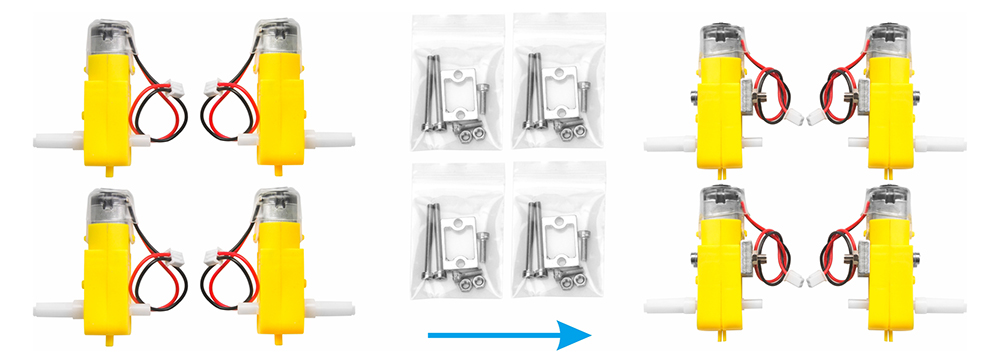
1) Befestige die 4 Motoren mit den Metallmotorhalterungen wie abgebildet. (Achte auf die korrekte Motorausrichtung, bevor du die Metallmotorhalterungen montierst.)
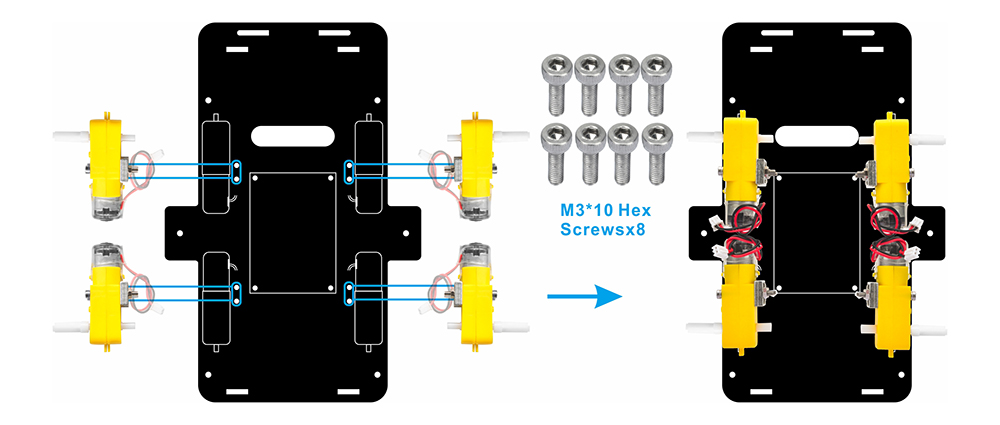
2) Befestige die 4 Motoren am unteren Fahrzeugchassis mit M3×10 Inbusschrauben und einem Inbusschlüssel, wie in der Abbildung gezeigt. (Die für diesen Schritt benötigten Schrauben sind im Metallmotorhalterungspaket enthalten.)
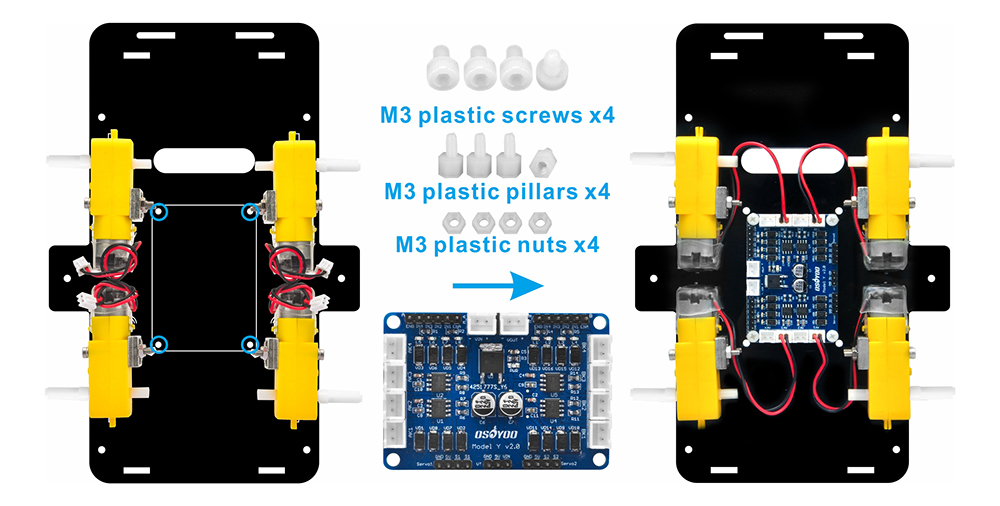
3) Montiere das OSOYOO Model Y Treiber-Board am unteren Fahrzeugchassis mit 4 M3 Kunststoffschrauben, Kunststoffsäulen und Kunststoffmuttern (Es wird empfohlen, die Kunststoffsäule mit dem Steckerende nach unten zu installieren). Verbinde dann die 4 Motoren mit den K1- und K3-Buchsen auf dem Model Y Motortreiber-Board, wie im Diagramm gezeigt.
(Achte auf die korrekte Ausrichtung des OSOYOO Model Y Treiber-Boards.)
Es gibt zwei Installationsmodi für Kunststoffsäulen: A. Das Steckerende der Kunststoffsäule zeigt nach unten. B. Das Steckerende der Kunststoffsäule zeigt nach oben.
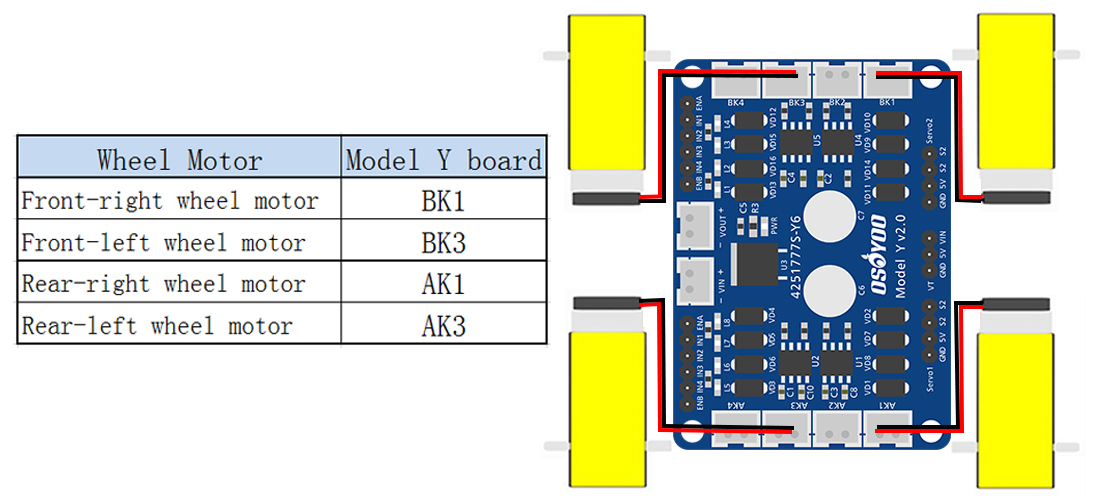
4) Verbinde die 4 Motoren mit den K1- und K3-Buchsen auf dem Model Y Motortreiber-Board, wie im Diagramm gezeigt.
Informationen zum Model Y V2.0 H-Brücken 4-Kanal-Motortreiber:
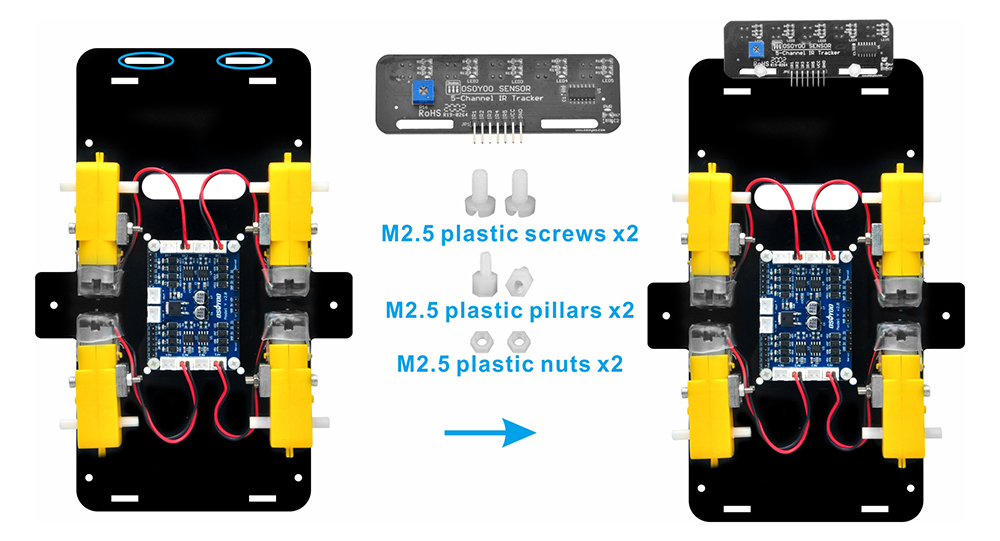
5) Befestige das Spurverfolgungssensor-Modul am unteren Chassis mit zwei M3 Kunststoffschrauben, zwei M3 Kunststoffsäulen und zwei M3 Kunststoffmuttern (Es wird empfohlen, die Kunststoffsäule mit dem Steckerende nach oben zu installieren). Stelle sicher, dass der Sensor fest befestigt und korrekt ausgerichtet ist, um eine genaue Funktion zu gewährleisten.
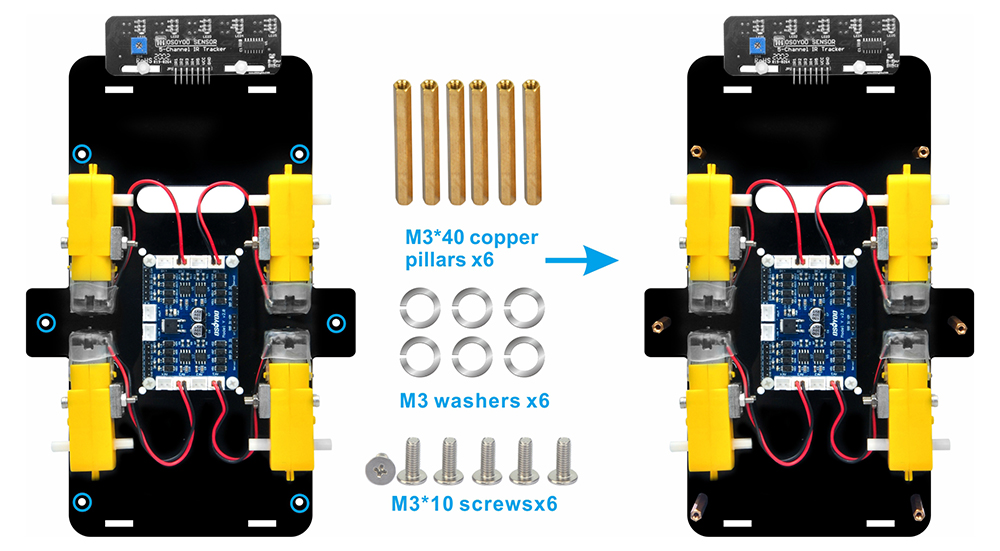
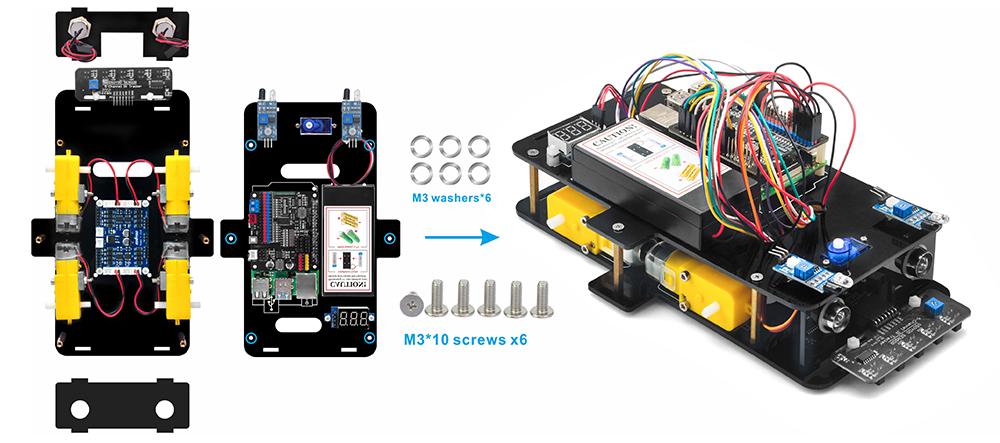
6) Befestige sechs M3×40 Kupfersäulen am unteren Chassis mit sechs M3×10 Schrauben und sechs M3 Unterlegscheiben. Stelle sicher, dass die Säulen fest eingebaut sind, um eine stabile Unterstützung des oberen Chassis zu gewährleisten.
Schiebe vor dem Anziehen eine Unterlegscheibe auf jede Schraube. Eine Unterlegscheibe verteilt den Schraubendruck und verbessert die Stabilität beim Befestigen von Schrauben in Metallsäulen.
7) Das Acryl-Chassis hat spezielle Montagelöcher für die Installation des Raspberry Pi Boards. Installiere vier weiße Kunststoff-Abstandshalter M2,5×5+6 und M2,5×5 Schrauben in diesen Löchern, wie in der folgenden Abbildung gezeigt.
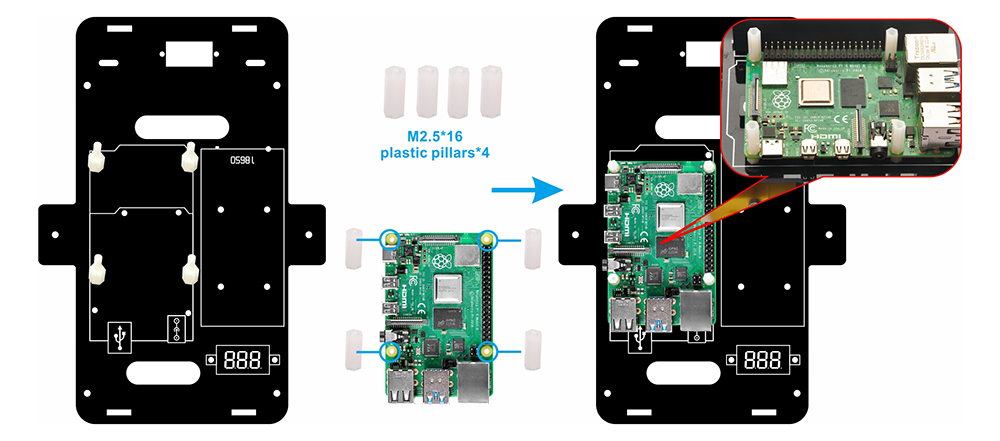
8) Befestige das Raspberry Pi 4 Board (nicht im Lieferumfang) am oberen Chassis mit vier M2,5×16 Kunststoffsäulen.
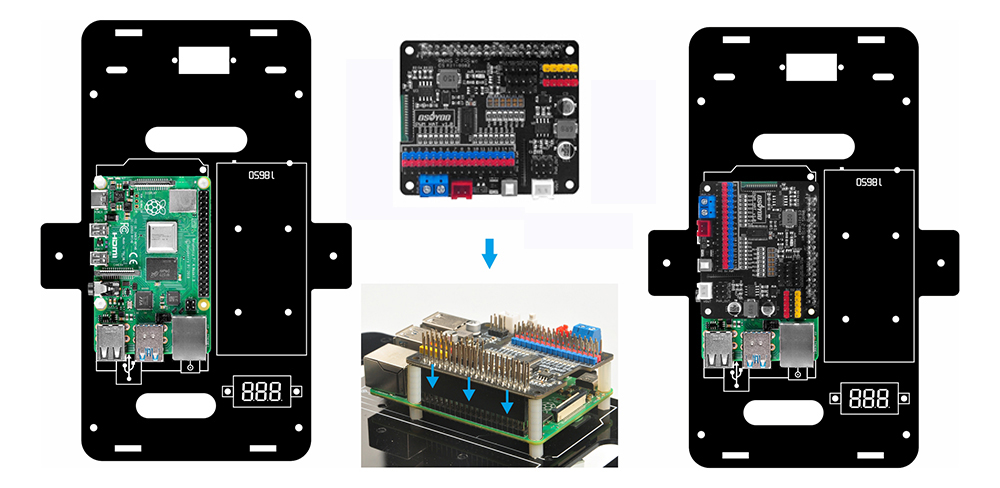
9) Stecke den OSOYOO PWM HAT Shield auf dein Raspberry Pi Board.
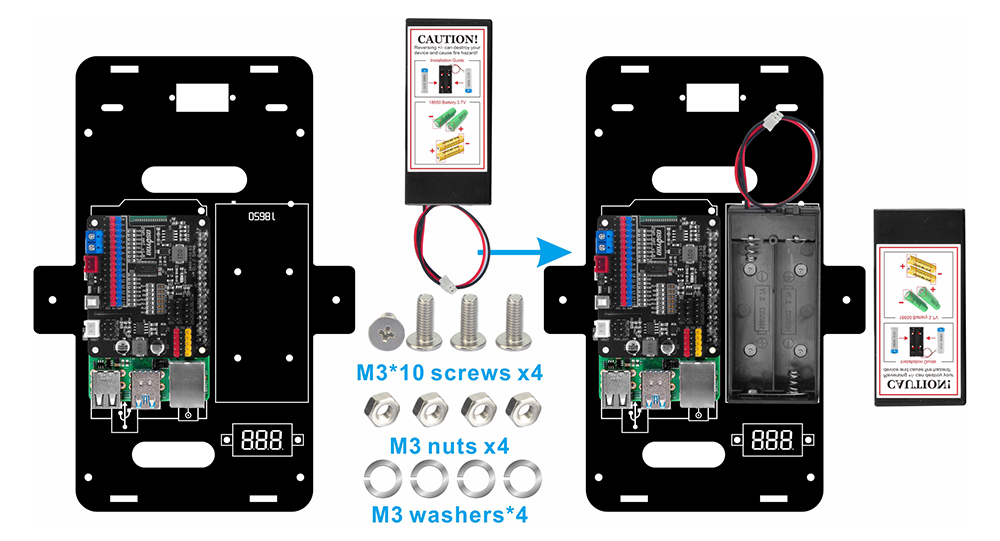
10) Befestige den Batteriehalter an den vorgesehenen Markierungen des oberen Chassis mit vier M3×10 Schrauben, vier M3 Muttern und vier M3 Unterlegscheiben.
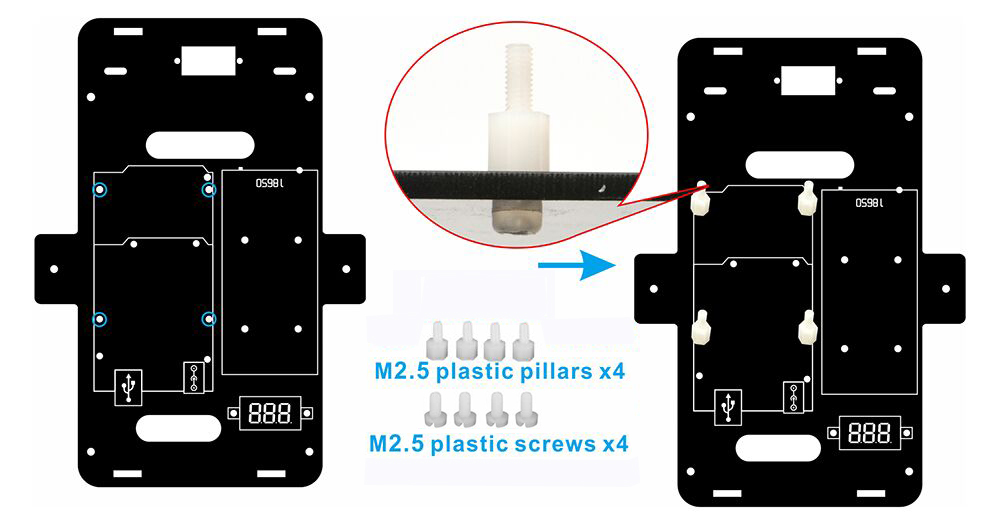
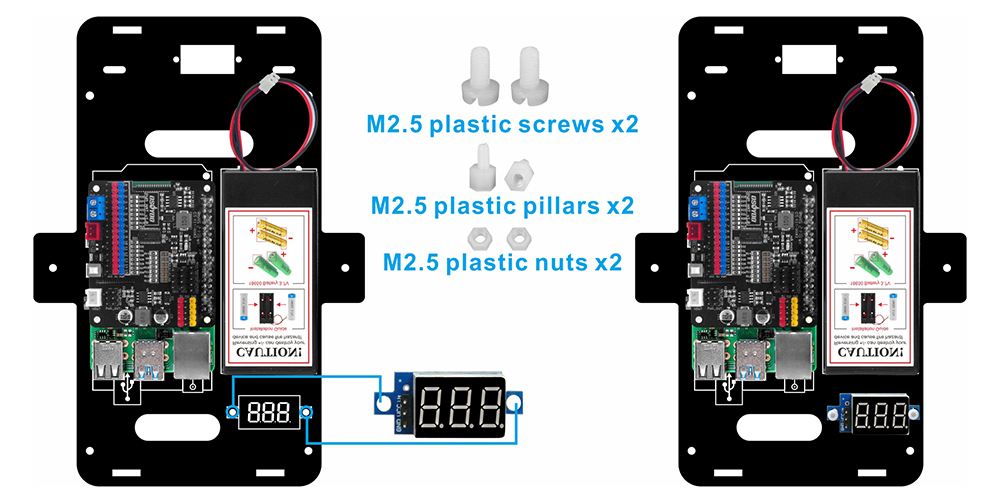
11) Befestige den Spannungsmesser an den vorgesehenen Markierungen des unteren Chassis mit zwei M2,5 Kunststoffschrauben, zwei M2,5 Kunststoffsäulen und zwei M2,5 Kunststoffmuttern. (Es wird empfohlen, die Kunststoffsäule mit dem Steckerende nach oben zu installieren.)
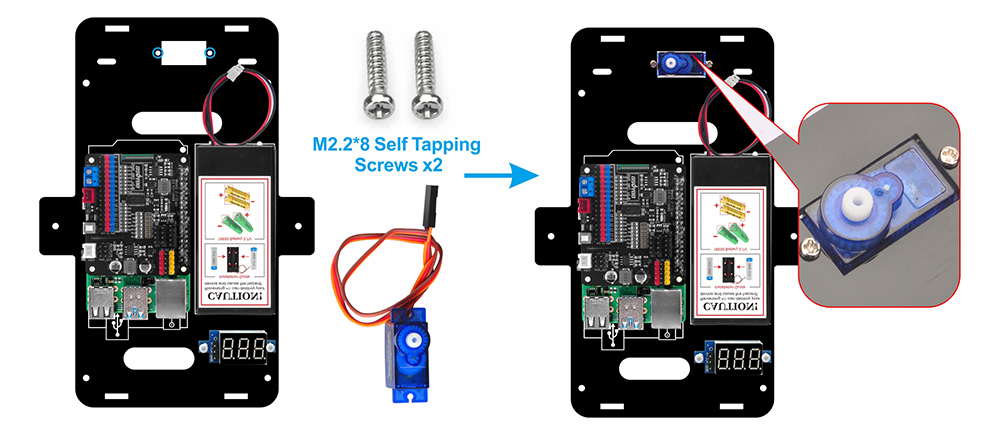
12) Montiere den SG90 Servomotor mit zwei M2,2×8 Blechschrauben an der Vorderseite des oberen Chassis.
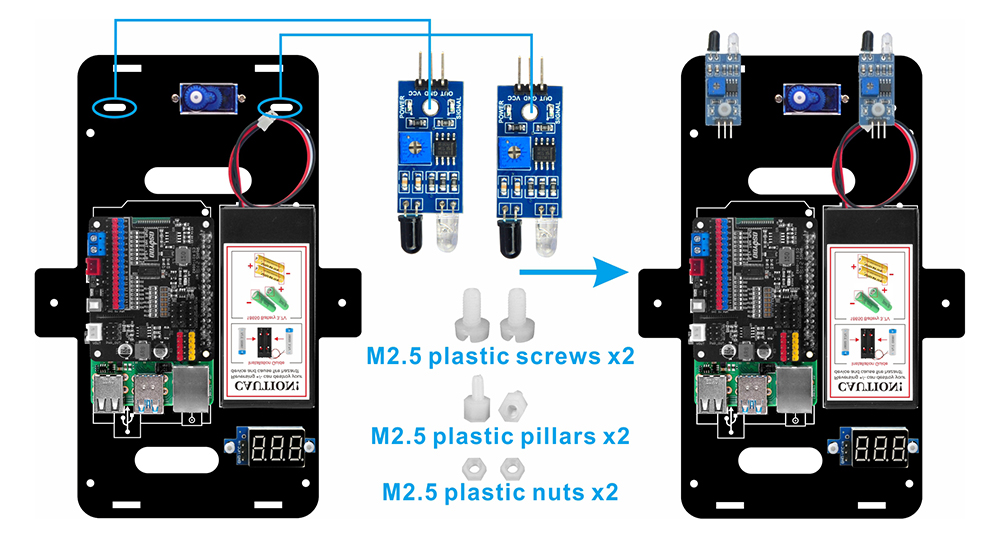
13) Befestige zwei IR-Abstandssensoren an der Vorderseite des oberen Chassis mit zwei M2,5 Kunststoffschrauben, M2,5 Kunststoffsäulen und M2,5 Kunststoffmuttern. Um die Sensoren fest zu befestigen, wird empfohlen, die Kunststoffsäule mit dem Steckerende nach oben zu installieren.
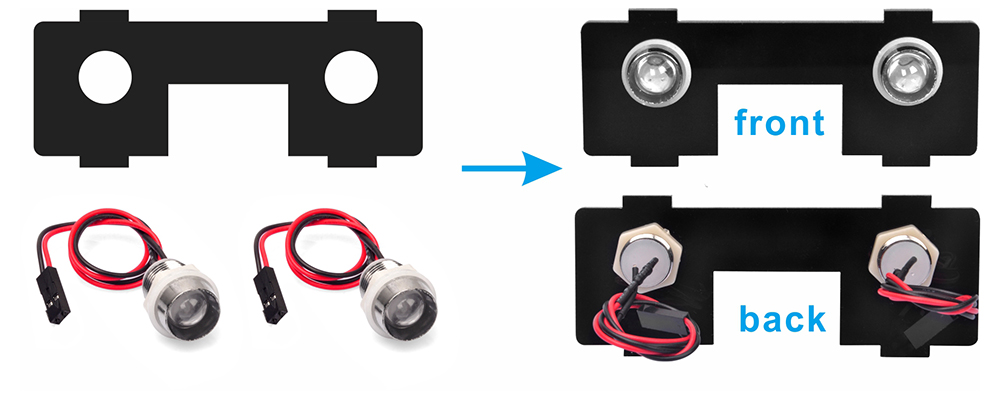
14) Montiere zwei LED-Leuchten an der vorderen Barriereplatte, wie im Diagramm gezeigt.
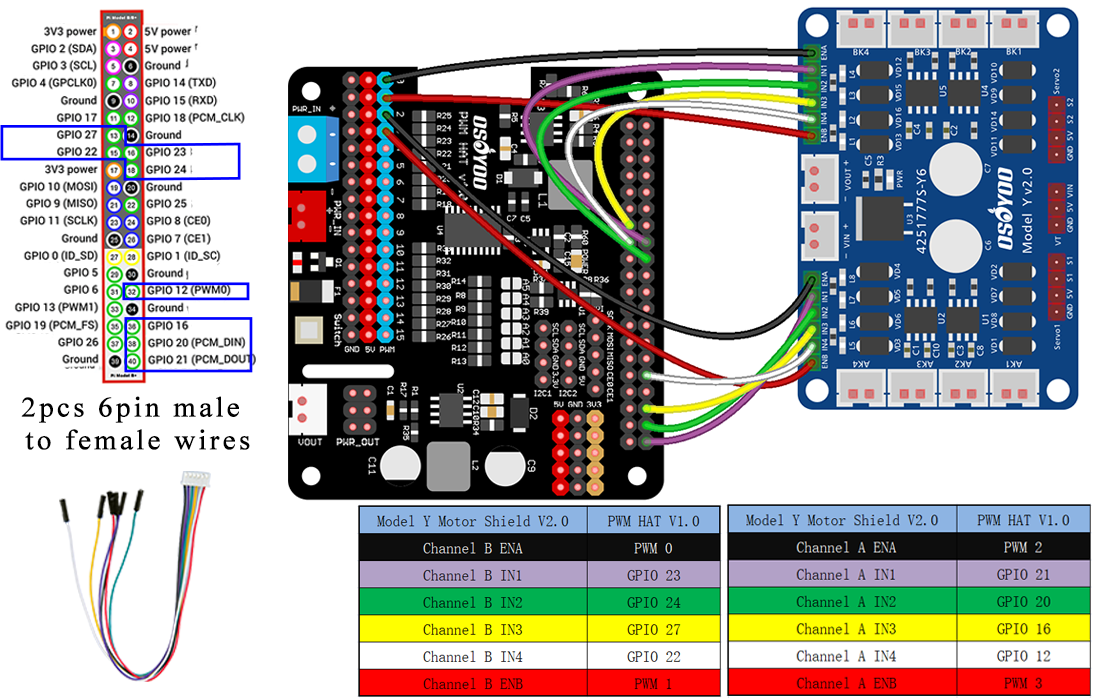
15) Verbinde das OSOYOO Model Y Board mit dem OSOYOO PWM HAT Shield über 2 sechspolige Buchse-zu-Buchse Jumper-Kabel. Die 6-poligen Kabel im Bereich B müssen durch die Öffnung neben dem SG90 Servo geführt werden; die anderen 6-poligen Kabel im Bereich A müssen durch die Öffnung neben dem Spannungsmesser geführt werden.
Achtung:
Halte beim Einstecken oder Herausziehen des 6-poligen Steckers aus der Model Y 6-poligen Buchse immer den Kunststoff-Steckerhalter fest. Ziehe den Stecker niemals an den Kabeln heraus, da dies die Kabel beschädigt.
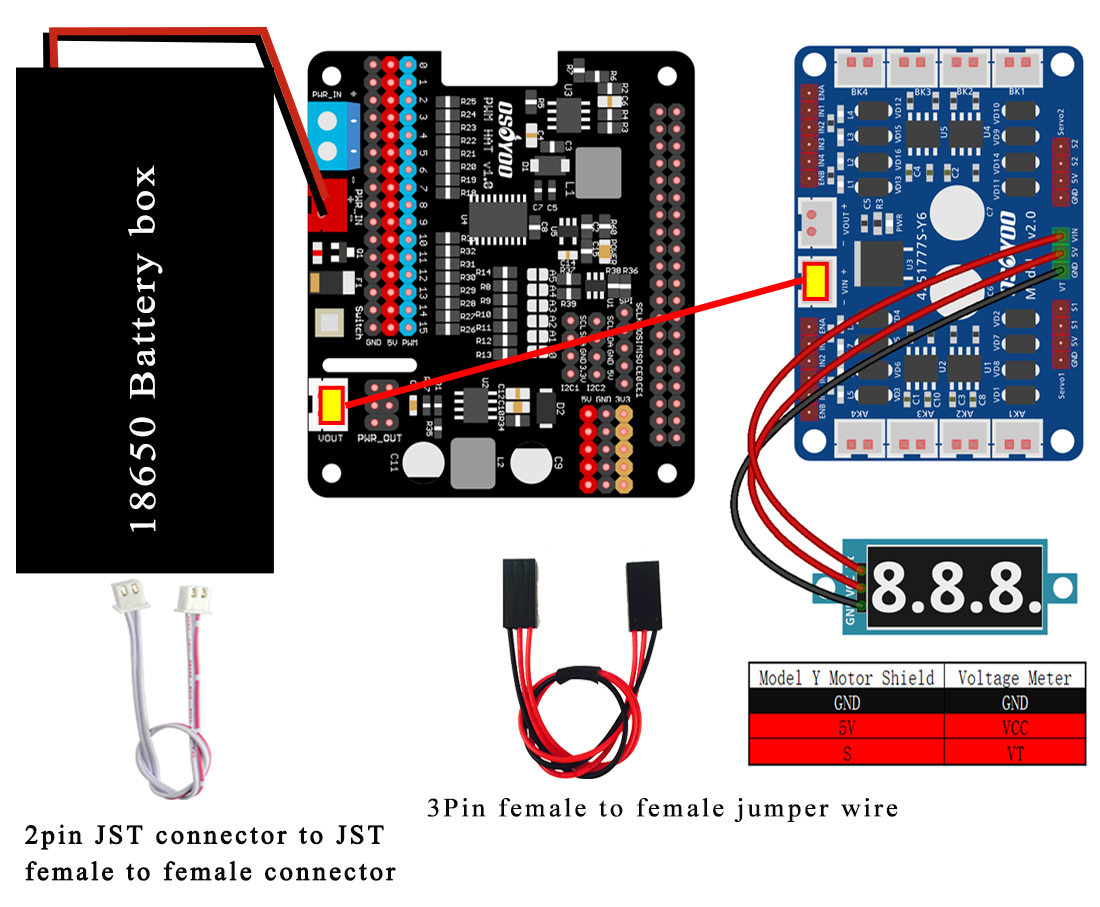
16) Verbinde den Spannungsmesser mit dem OSOYOO Model Y Board über ein 3-poliges Buchse-zu-Buchse Jumper-Kabel gemäß dem folgenden Anschlussdiagramm.
Verbinde die 12V-GND-Buchse des OSOYOO Model Y Boards mit der VIN-GND-Buchse über das OSOYOO 2-polige PnP-Kabel (20 cm), wie im folgenden Diagramm gezeigt.
Verbinde den Batteriehalter mit der VIN-GND-Buchse des OSOYOO UART WiFi Shields gemäß dem folgenden Anschlussdiagramm.
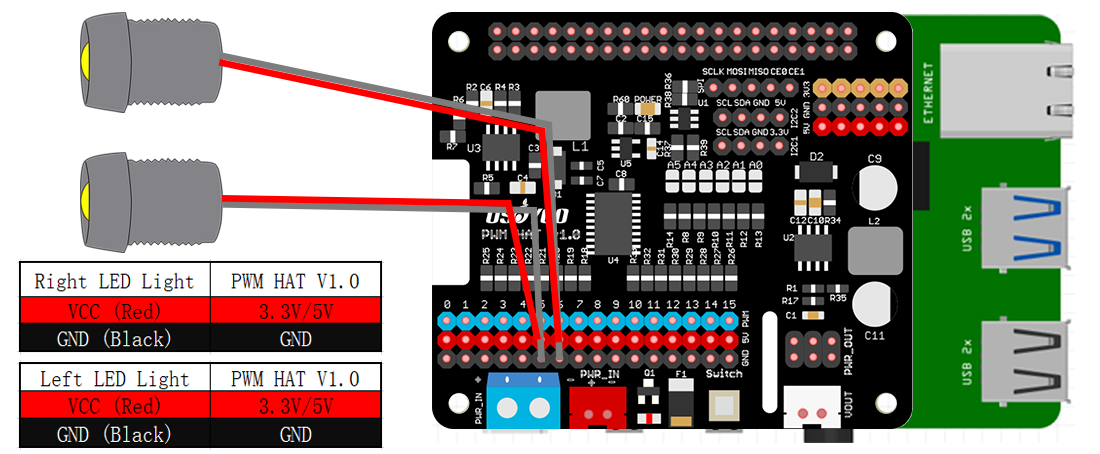
17) Montiere 2 LED-Leuchten am vorderen Querdiaphragma.
Verbinde die roten Kabel (VCC) der LED-Leuchten mit den 3,3-V- oder 5-V-Pins und die schwarzen Kabel (GND) mit den GND-Pins am OSOYOO PWM HAT Shield.
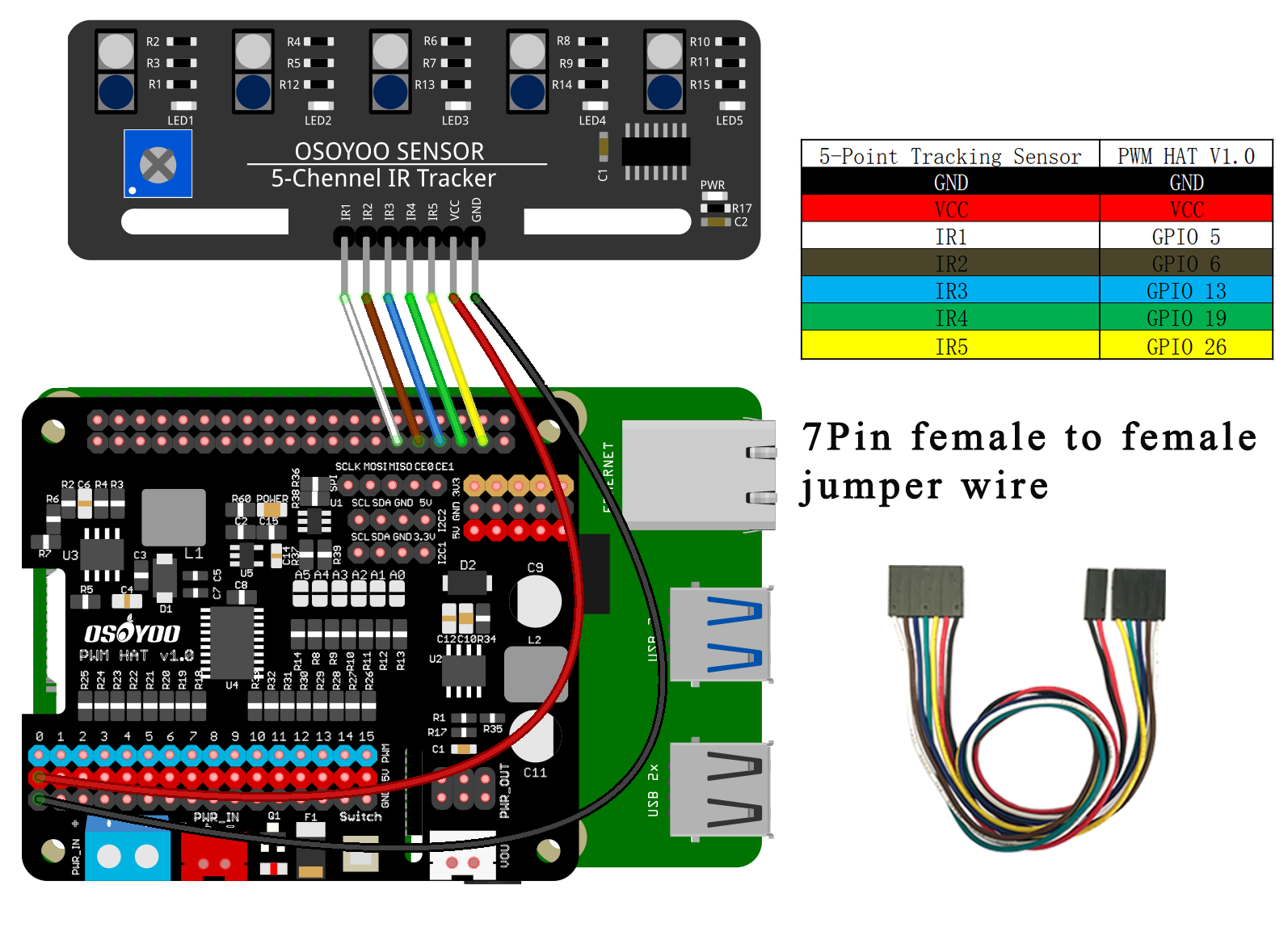
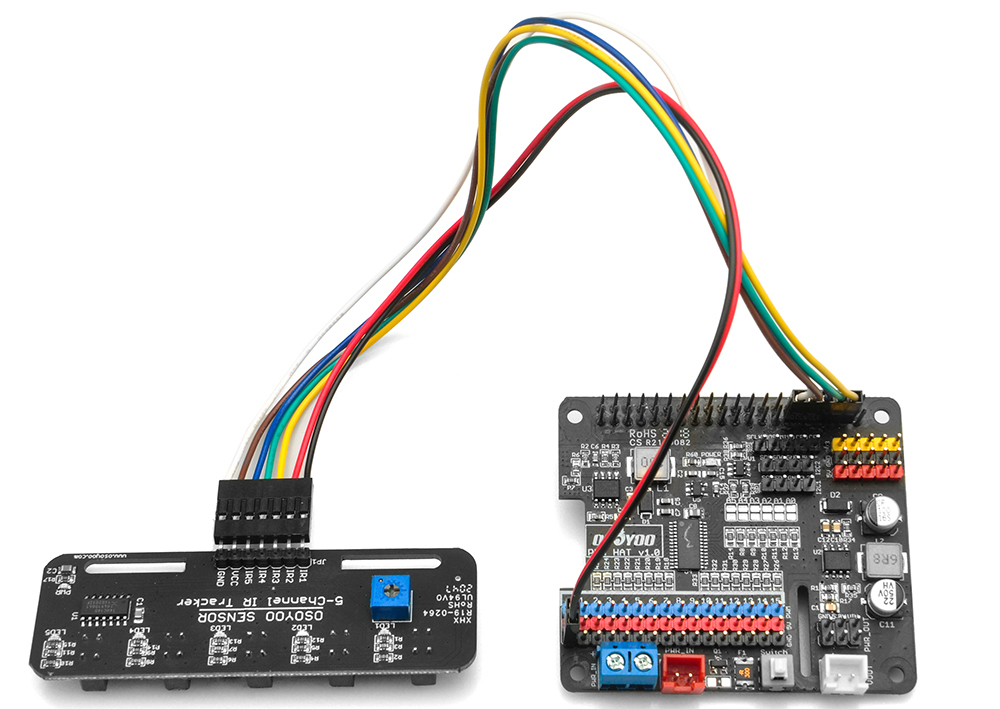
18) Verbinde die GND-VCC-Pins des Spurverfolgungssensor-Moduls mit den GND-5V-Pins am OSOYOO PWM HAT Shield. Verbinde IR1, IR2, IR3, IR4 und IR5 mit GPIO5, GPIO6, GPIO13, GPIO19 und GPIO26 über ein 7-poliges 25-cm Buchse-zu-Buchse Kabel, wie unten gezeigt.
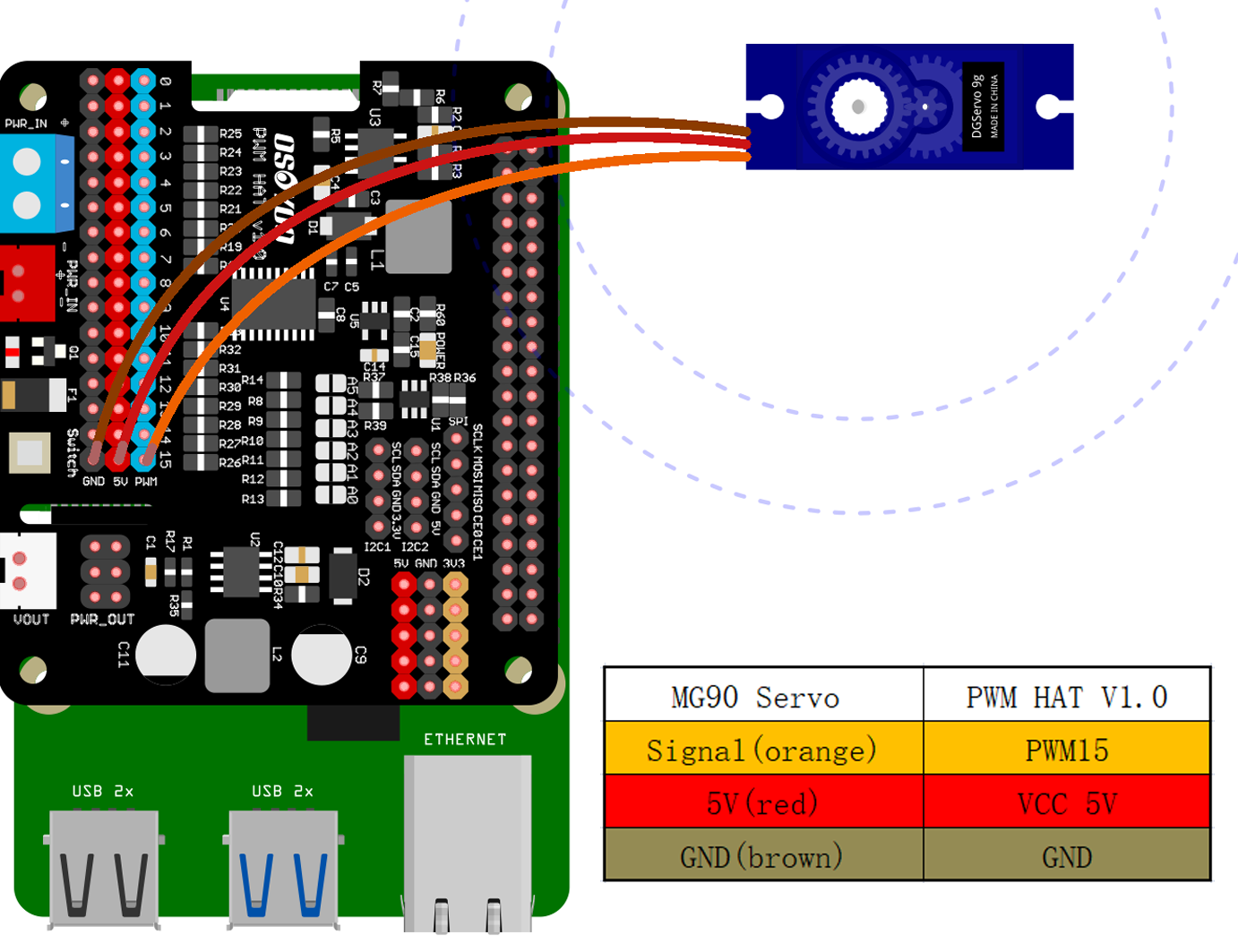
19) Verbinde den SG90 Servomotor, das OSOYOO Model Y Board und den OSOYOO PWM HAT gemäß dem folgenden Diagramm.
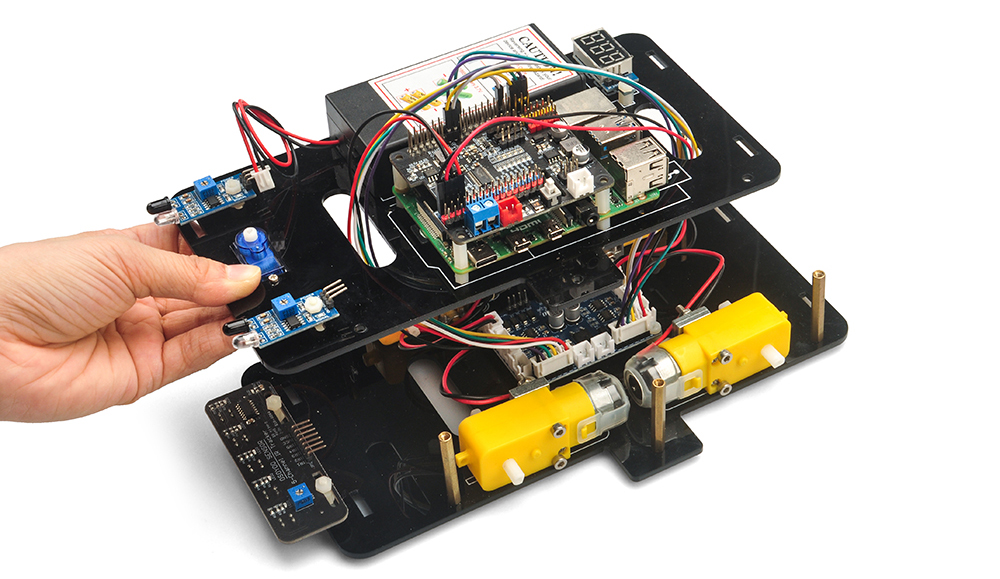
20) Stelle sicher, dass alle notwendigen Schaltkreisverbindungen abgeschlossen sind, bevor du das obere und untere Chassis zusammenbaust. Befestige dann das obere Chassis am unteren Chassis mit 6 M3×10 Inbusschrauben.
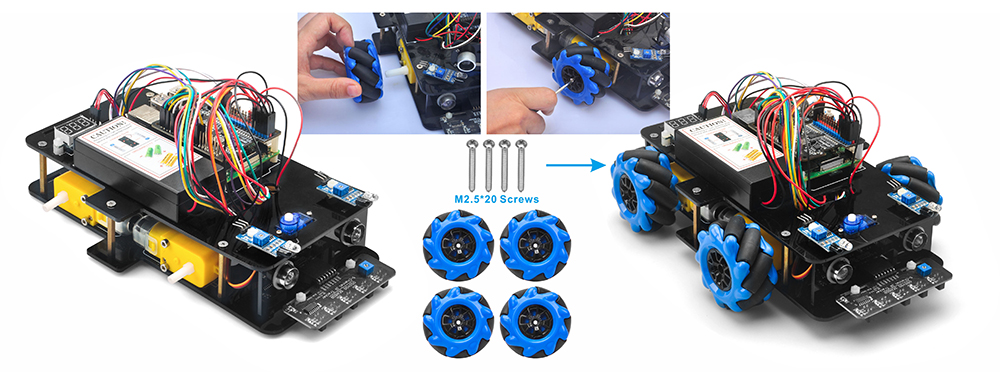
21) Installiere 4 flexible Kupplungen und Räder auf den Motoren mit 4 M2,5×20 oder M2,6×20 Schrauben. Achte darauf, dass die weiße Kupplung vollständig in den Boden des gelben Motors eingesetzt ist.
22) Installiere die 4 Räder auf den Motoren mit 4 M2,5×20 oder M2,6×20 Schrauben.
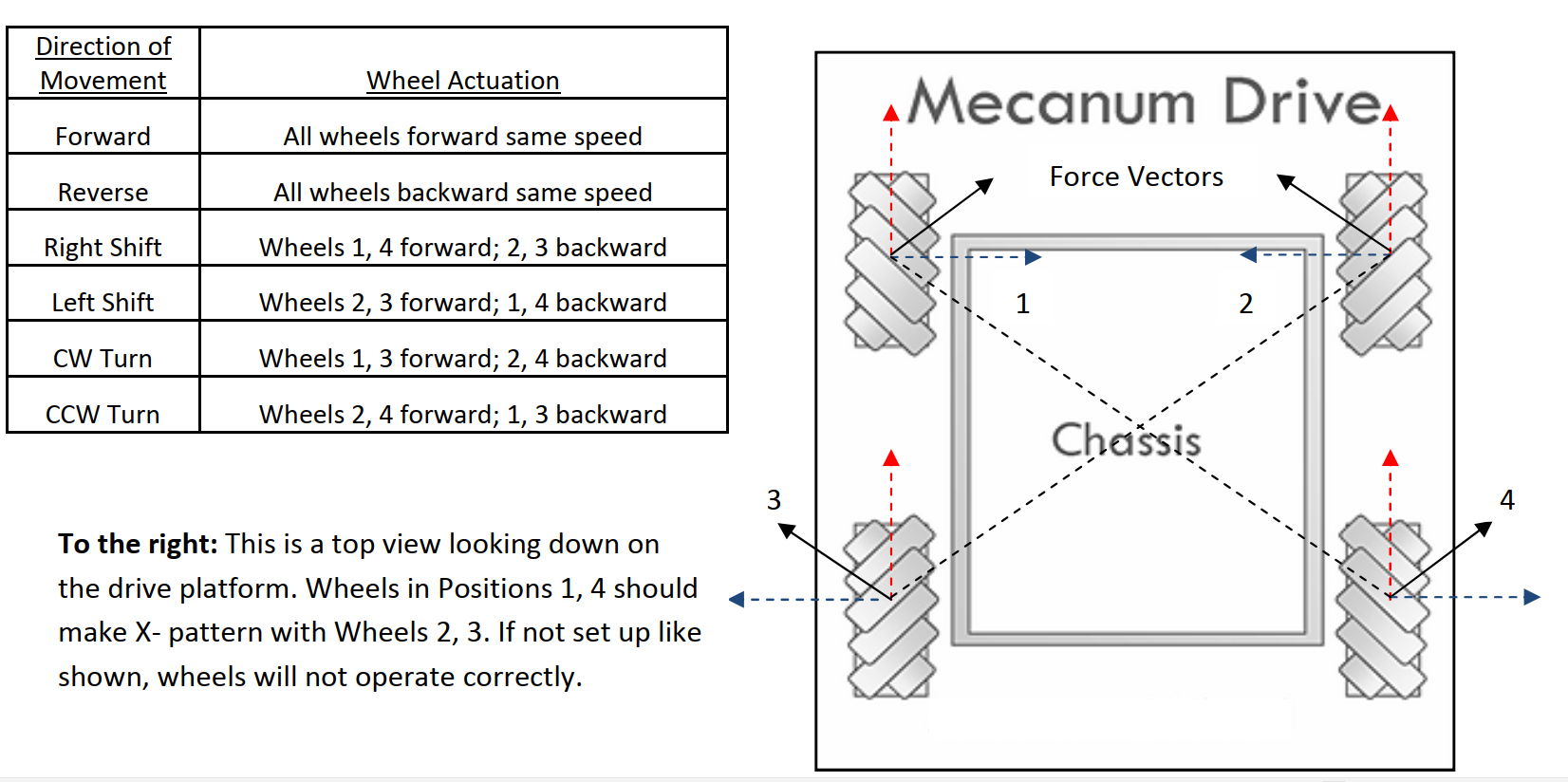
Hinweis: Es gibt zwei Radtypen. Ordne sie so an, dass die Rollen – von oben betrachtet – zur Fahrzeugmitte geneigt sind.
Es gibt zwei Typen von Mecanum-Rädern – links und rechts – und der Unterschied zwischen ihnen liegt in der Ausrichtung der Rollen. Bei einem Mecanum-Rad vom Typ A, wie unten abgebildet, sind die Rollen von unten rechts nach oben links ausgerichtet. Die Rollen bei B-Typ-Rädern sind in die entgegengesetzte Richtung eingebaut.
Eine korrekte Konfiguration erfordert, dass jedes der vier Räder so positioniert ist, dass die Rotationsachse der oberen Rolle jedes Rades zur Mitte der Plattform zeigt. Bitte beachte, dass alle dynamischen Analysen und vorgeschriebenen Codes auf dieser Konfiguration basieren.
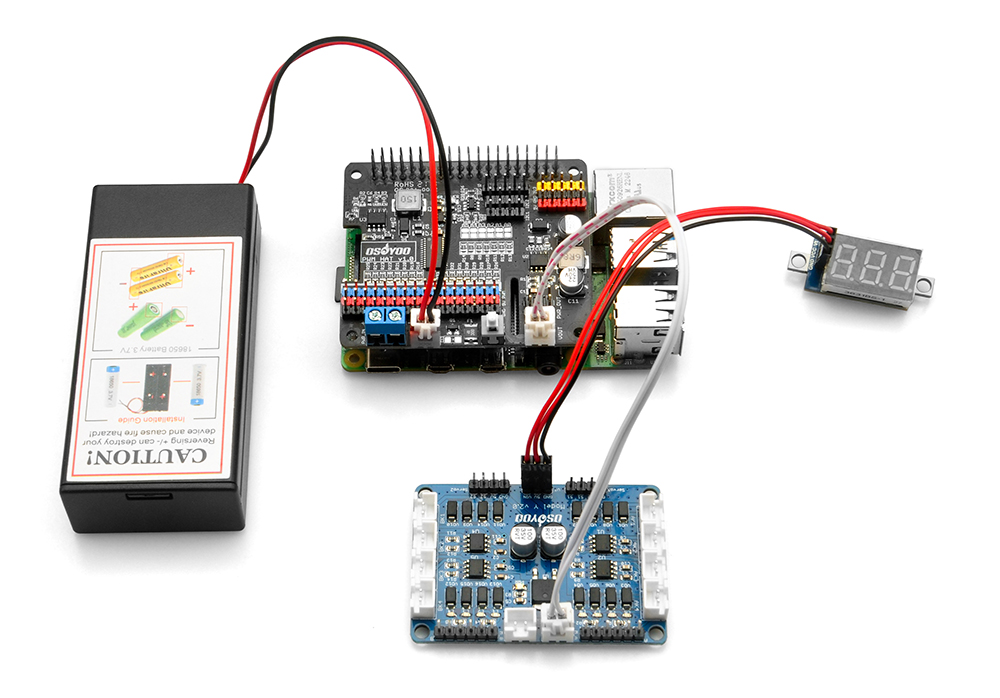
Der Hardware-Zusammenbau ist nun abgeschlossen. Bevor du die 18650 Akkus in den Halter einlegst, musst du zunächst den Beispielcode auf deinen Raspberry Pi hochladen und ausführen. Die nächste Lektion behandelt dies im Detail.