Model 2021006600
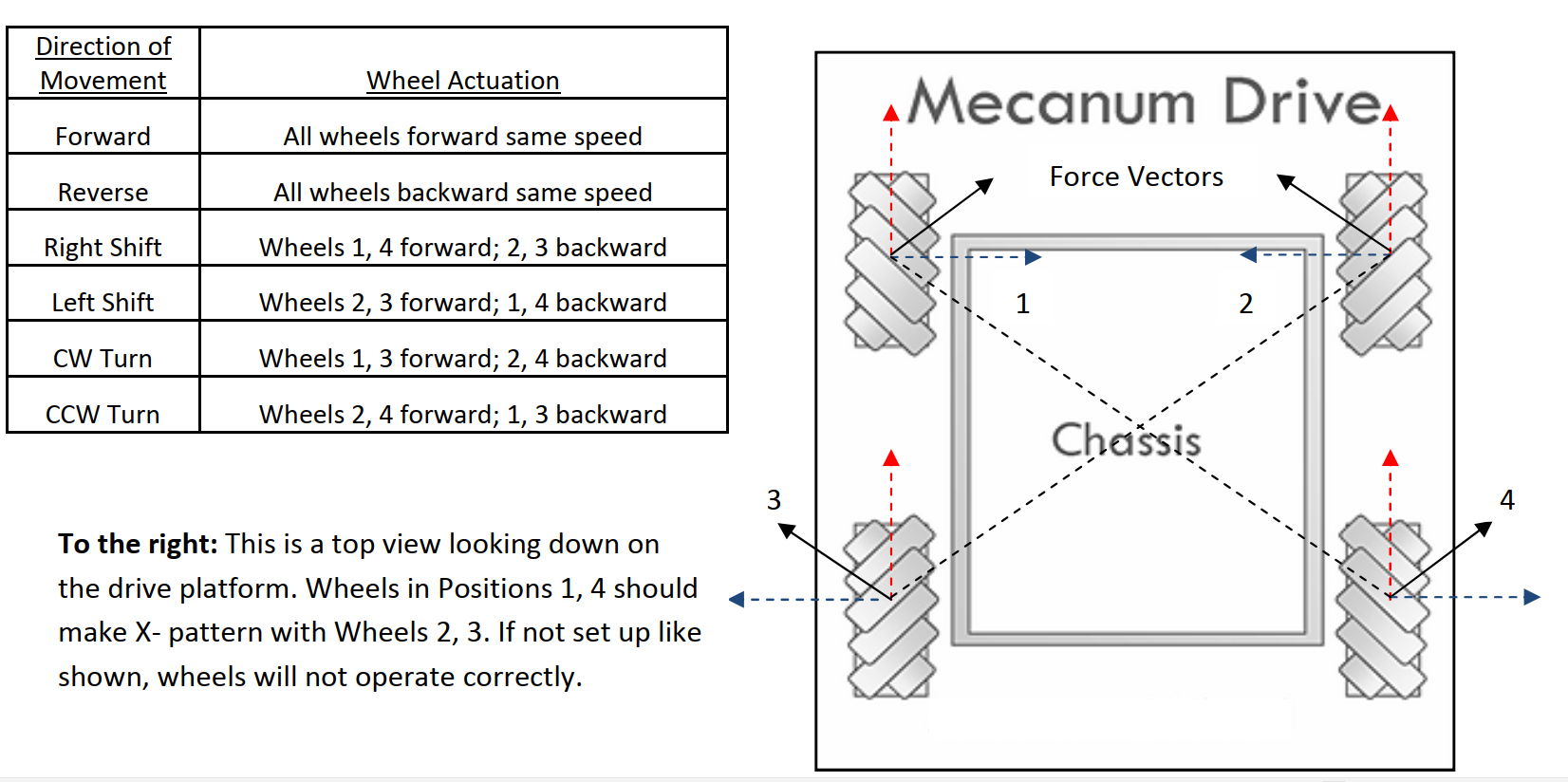
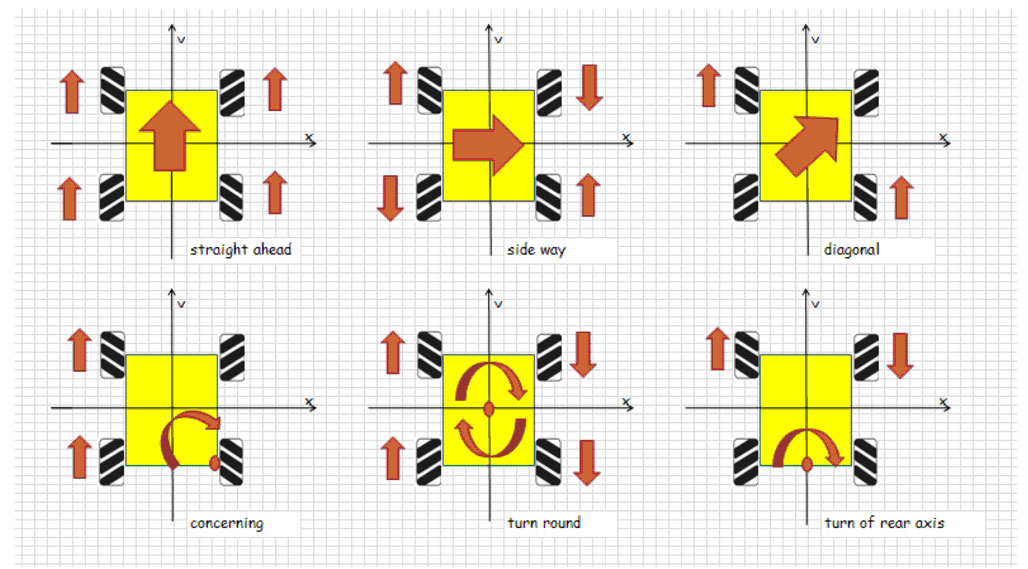
La roue omnidirectionnelle Mecanum est un type de roue fascinant qui permet à un robot de se déplacer dans toutes les directions, y compris des déplacements latéraux parallèles vers la gauche et vers la droite.
Dans ce projet, nous vous montrons comment utiliser un Raspberry Pi pour contrôler un robot à roues Mecanum OSOYOO et effectuer des mouvements de base : avancer, reculer, tourner à gauche, tourner à droite, déplacement parallèle à gauche et déplacement parallèle à droite.
Cette leçon vous guide également à travers l’assemblage du châssis du robot et la connexion du Raspberry Pi et du OSOYOO PWM HAT à la carte OSOYOO Model Y. Cette configuration constitue la base de toutes les leçons suivantes.
Châssis de robot à roues Mecanum OSOYOO x1
Roues et moteurs OSOYOO x4 (roues gauches x2 / roues droites x2)
Carte Raspberry Pi 4/5 x1 (non incluse dans ce kit)
Shield OSOYOO PWM HAT x1
Carte pilote moteur OSOYOO Model Y x1
Voltmètre OSOYOO x1
Boîtier de batteries OSOYOO x1
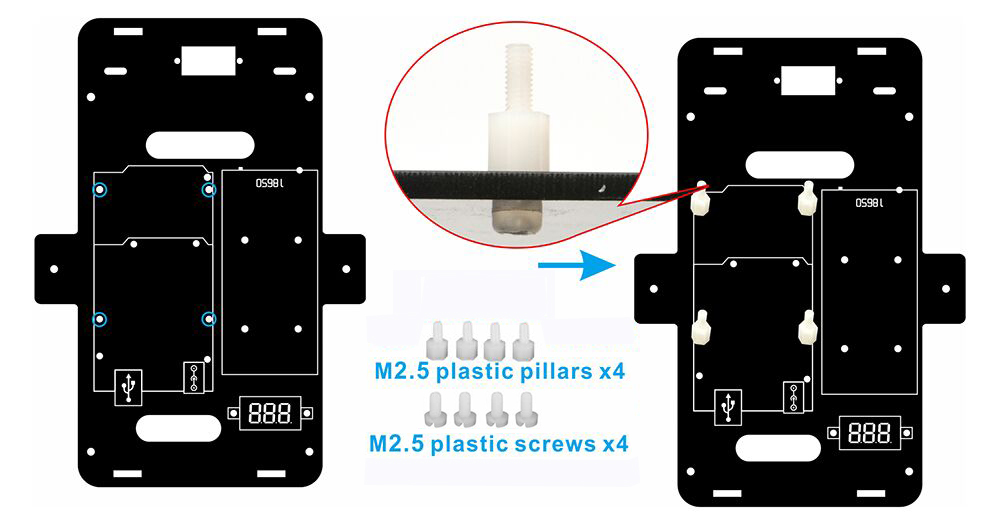
Câble cavalier OSOYOO 6 broches femelle-femelle x2
Câble cavalier OSOYOO 3 broches femelle-femelle x1
Câble OSOYOO 2 broches XH2.54 PnP femelle-femelle x1
Batteries 18650 (3,7 V) x2
Chargeur de batteries x1
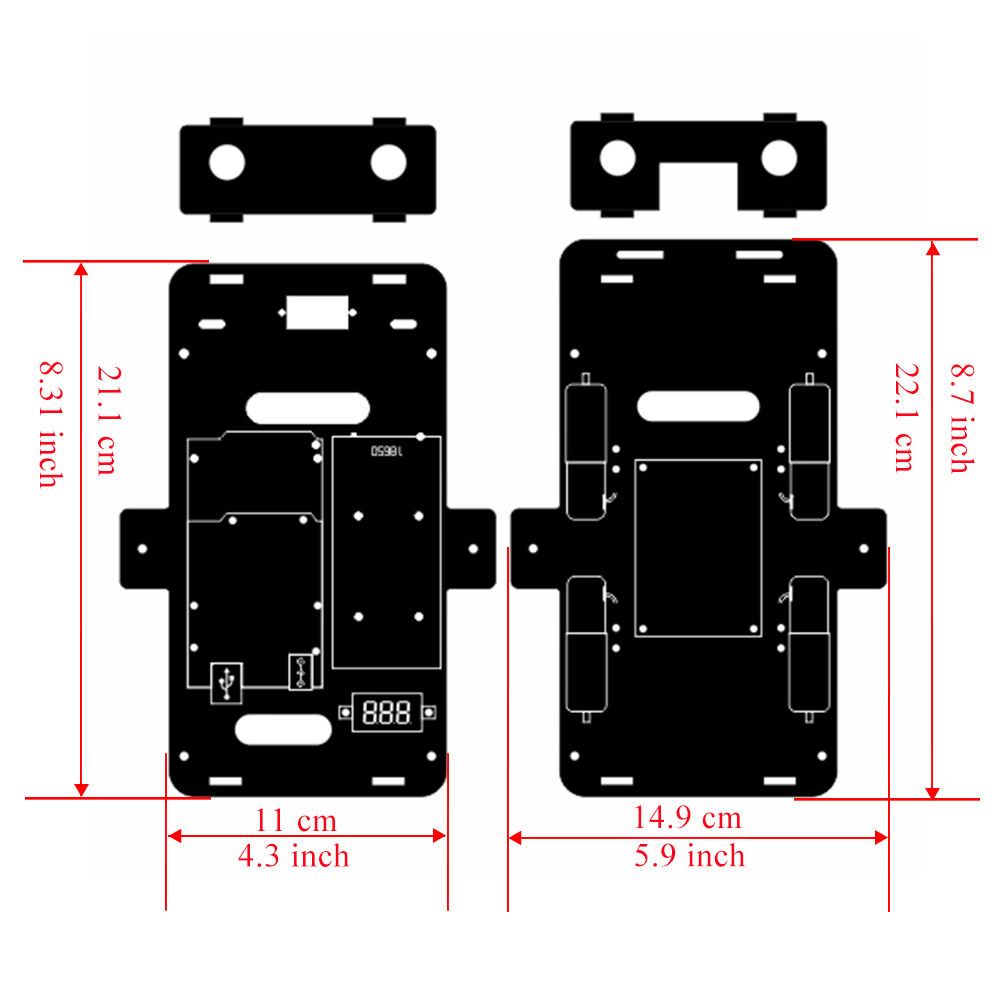
Dimensions
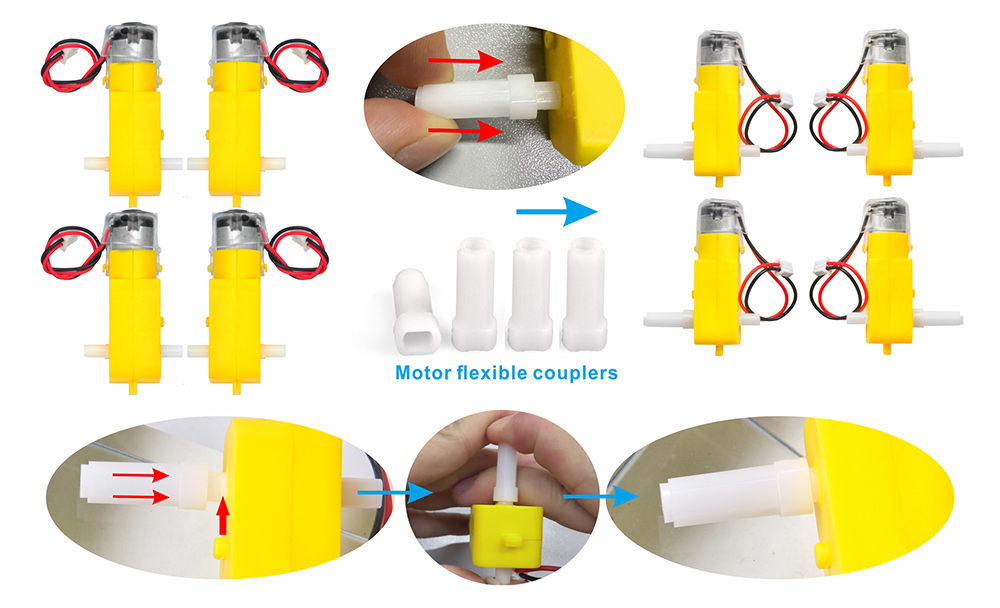
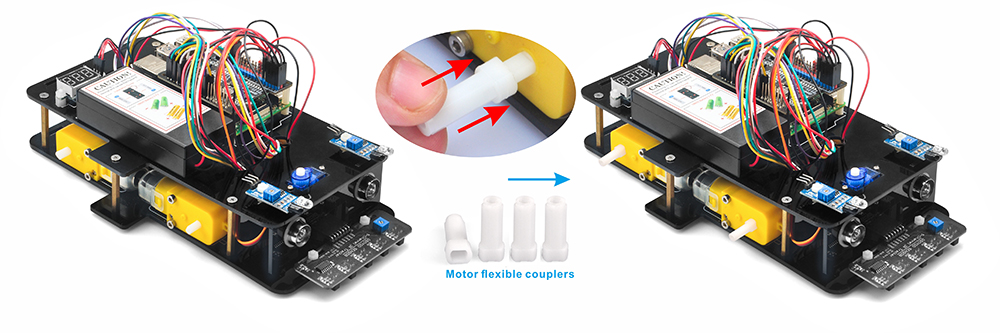
0) Installez le coupleur blanc sur le moteur jaune en suivant les étapes illustrées. Assurez-vous que le coupleur est enfoncé jusqu’en butée.
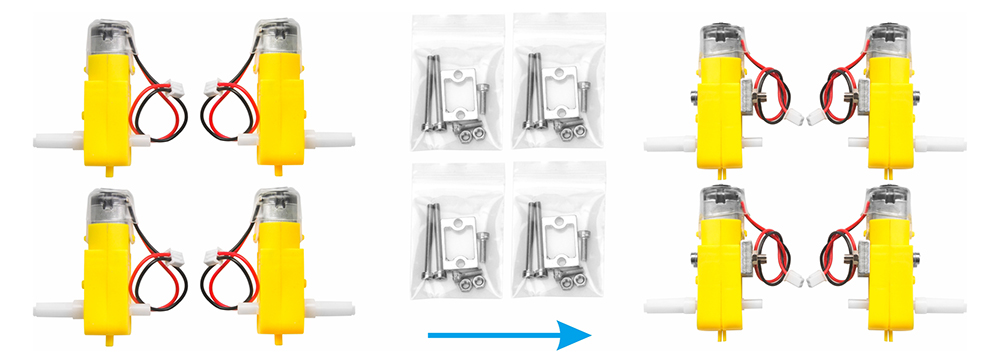
1) Fixez les 4 moteurs à l’aide des supports métalliques, comme illustré. (Vérifiez l’orientation correcte des moteurs avant d’installer les supports métalliques.)
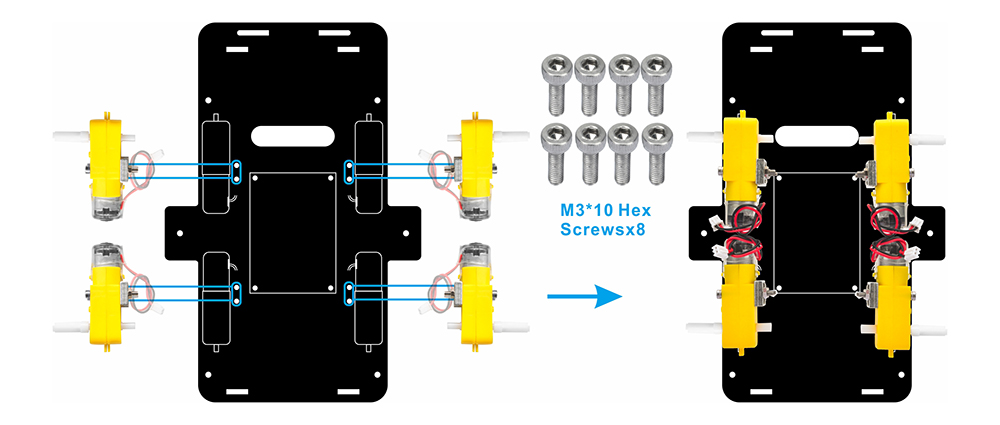
2) Fixez les 4 moteurs sur le châssis inférieur à l’aide de vis hexagonales M3×10 et d’une clé hexagonale, comme illustré. (Les vis nécessaires pour cette étape sont incluses dans le kit des supports métalliques.)
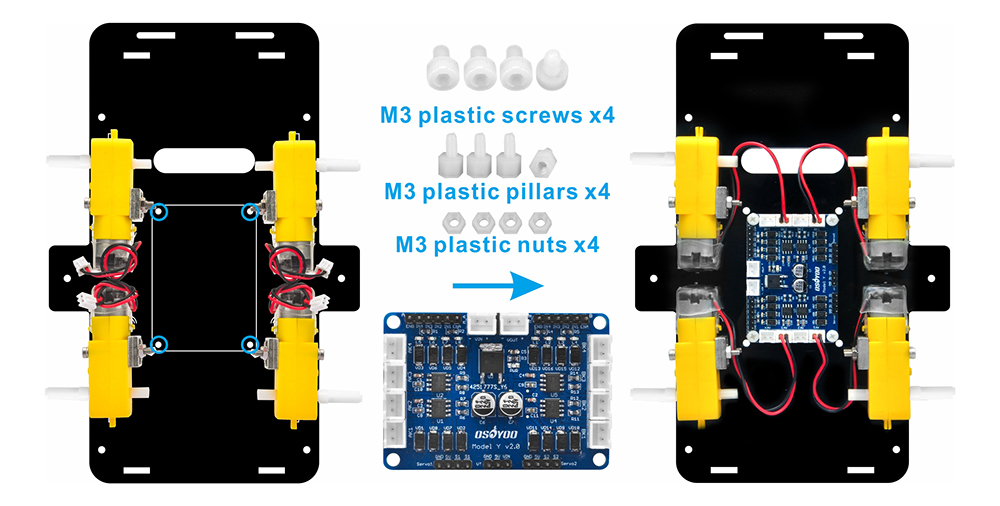
3) Montez la carte pilote OSOYOO Model Y sur le châssis inférieur à l’aide de 4 vis plastique M3, de colonnes plastique et d’écrous plastique (il est recommandé d’installer la colonne plastique avec l’extrémité mâle vers le bas). Connectez ensuite les 4 moteurs aux prises K1 et K3 de la carte pilote moteur Model Y, comme indiqué sur le schéma.
(Veillez à installer la carte pilote OSOYOO Model Y dans la bonne orientation.)
Il existe deux modes d’installation pour les colonnes plastique : A. L’extrémité mâle de la colonne plastique est orientée vers le bas. B. L’extrémité mâle de la colonne plastique est orientée vers le haut.
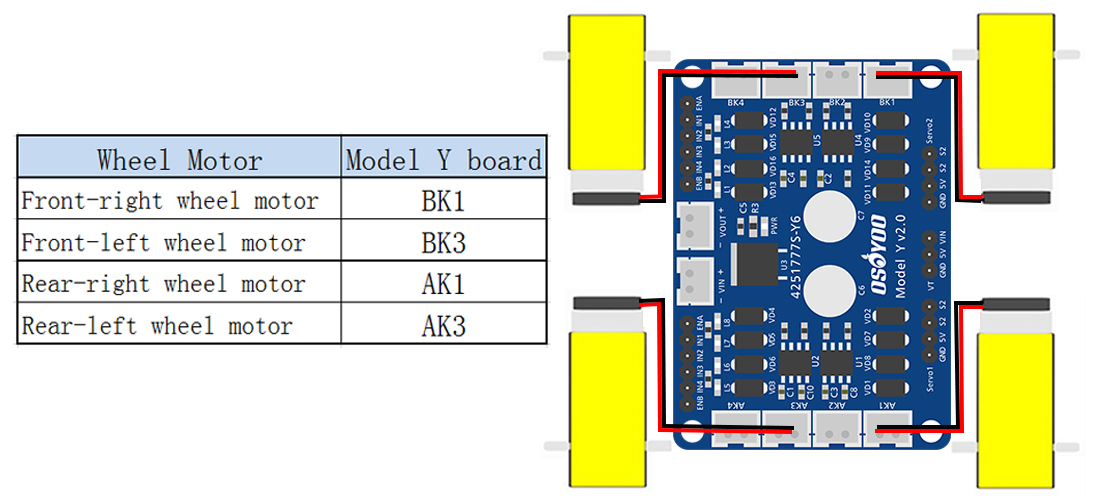
4) Connectez les 4 moteurs aux prises K1 et K3 de la carte pilote moteur Model Y, comme indiqué sur le schéma.
À propos du pilote moteur 4 canaux H-Bridge Model Y V2.0 :
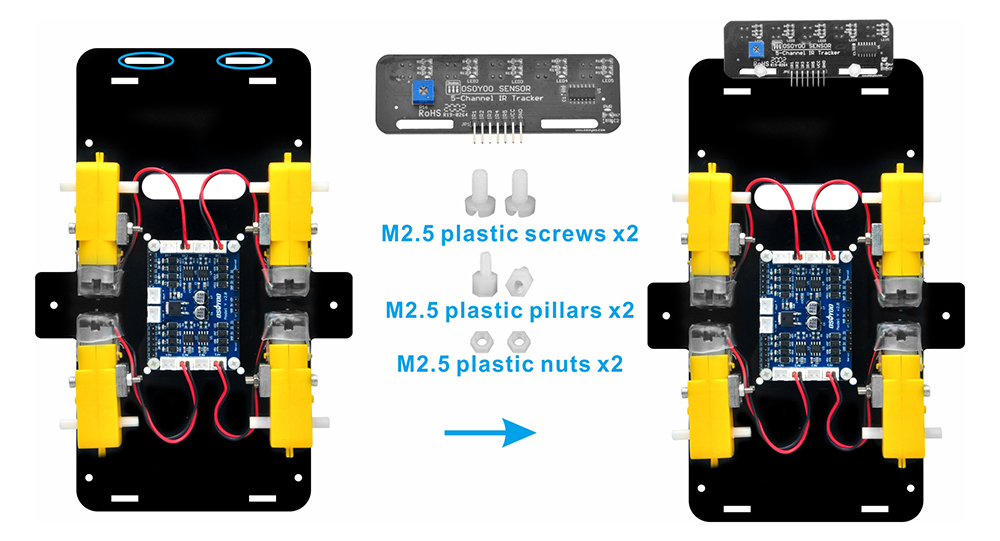
5) Fixez le module de capteur de suivi sur le châssis inférieur à l’aide de deux vis plastique M3, deux colonnes plastique M3 et deux écrous plastique M3 (il est recommandé d’installer la colonne plastique avec l’extrémité mâle vers le haut). Assurez-vous que le capteur est bien fixé et correctement aligné pour un fonctionnement précis.
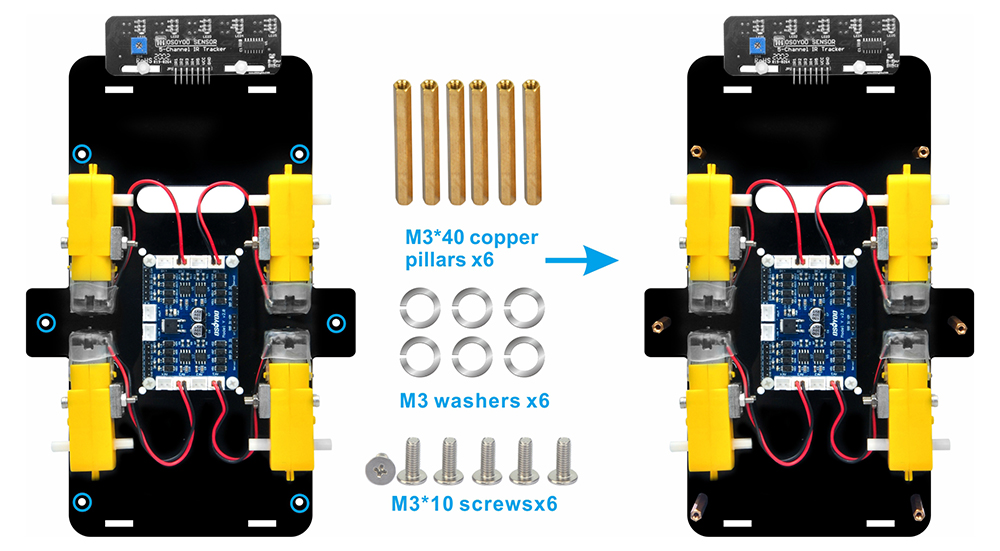
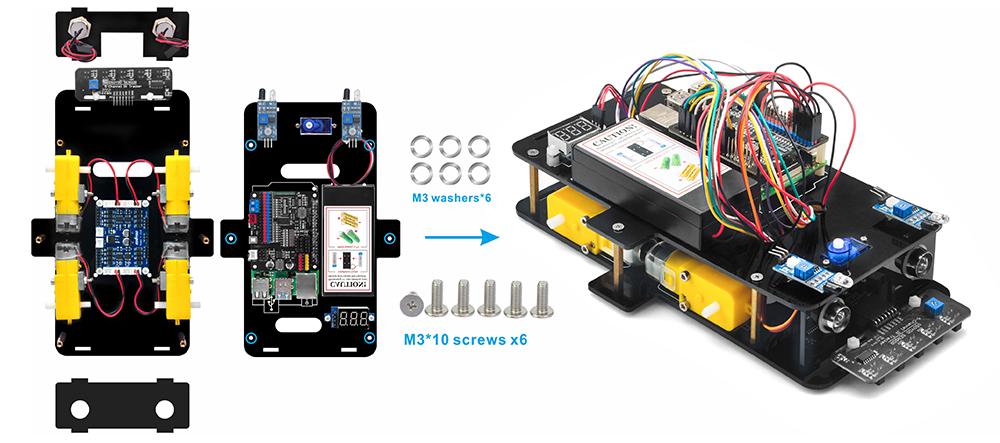
6) Fixez six colonnes en cuivre M3×40 sur le châssis inférieur à l’aide de six vis M3×10 et six rondelles M3. Assurez-vous que les colonnes sont solidement fixées pour offrir un support stable au châssis supérieur.
Glissez une rondelle sur chaque vis avant de la serrer. Une rondelle répartit la pression de la vis et améliore la stabilité lors du vissage dans des colonnes métalliques.
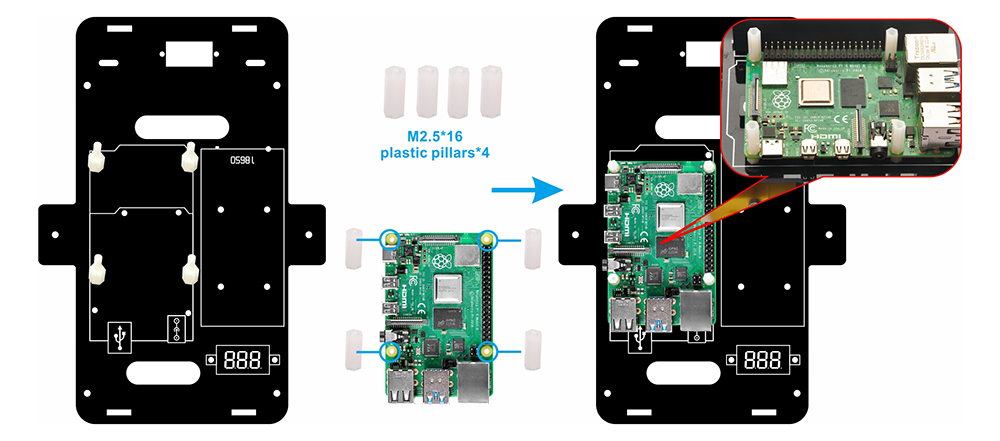
7) Le châssis en acrylique dispose de trous de montage dédiés pour installer la carte Raspberry Pi. Installez quatre entretoises plastique blanches M2,5×5+6 et des vis M2,5×5 dans ces trous, comme illustré ci-dessous.
8) Fixez la carte Raspberry Pi 4 (non incluse) sur le châssis supérieur à l’aide de quatre colonnes plastique M2,5×16.
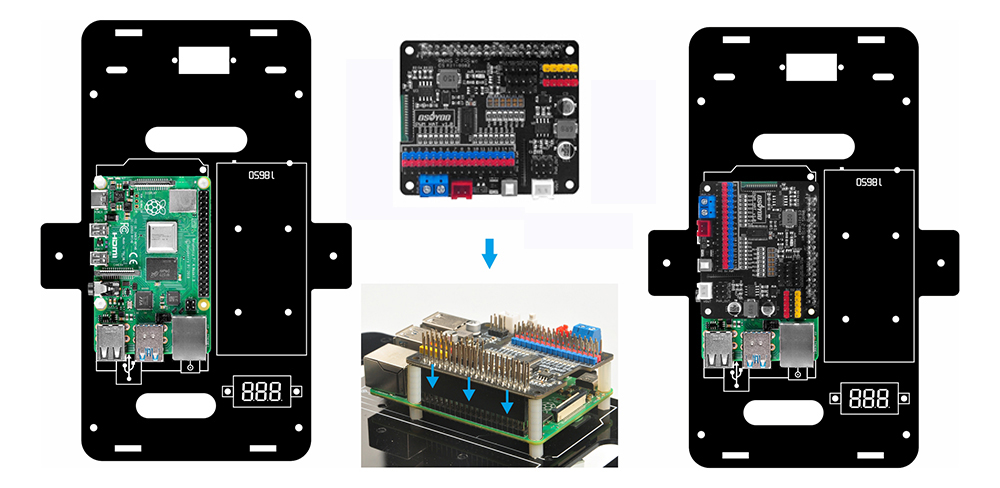
9) Emboîtez le shield OSOYOO PWM HAT sur votre carte Raspberry Pi.
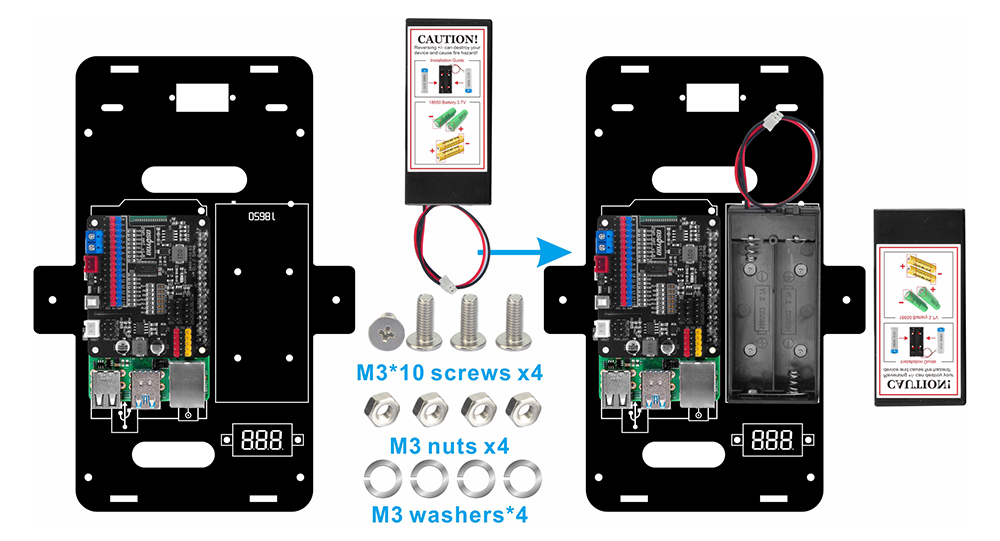
10) Fixez le boîtier de batteries aux emplacements désignés sur le châssis supérieur à l’aide de quatre vis M3×10, quatre écrous M3 et quatre rondelles M3.
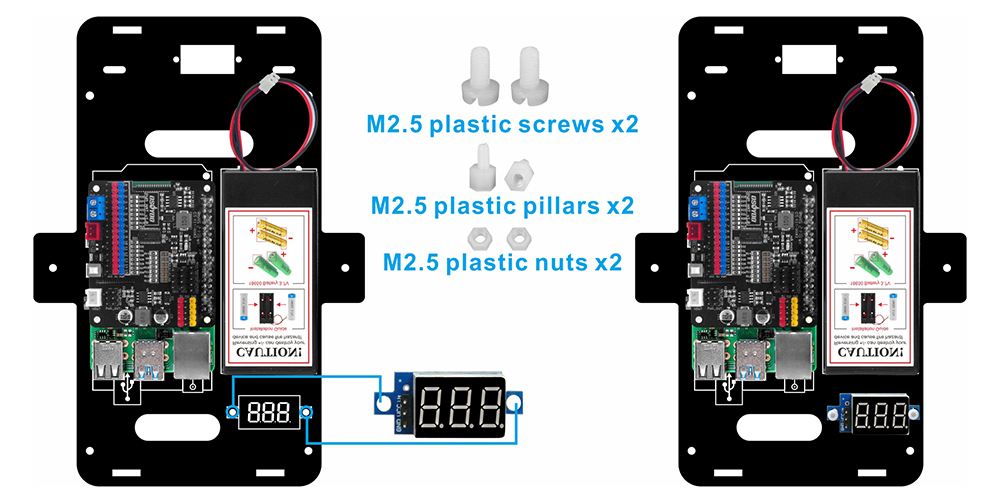
11) Fixez le voltmètre aux emplacements désignés sur le châssis inférieur à l’aide de deux vis plastique M2,5, deux colonnes plastique M2,5 et deux écrous plastique M2,5. (Il est recommandé d’installer la colonne plastique avec l’extrémité mâle vers le haut.)
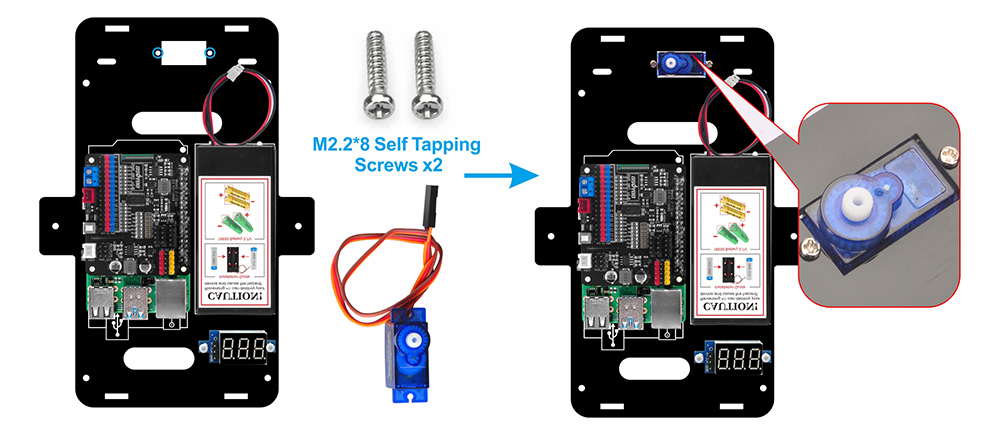
12) Montez le servo-moteur SG90 à l’avant du châssis supérieur à l’aide de deux vis autotaraudeuses M2,2×8.
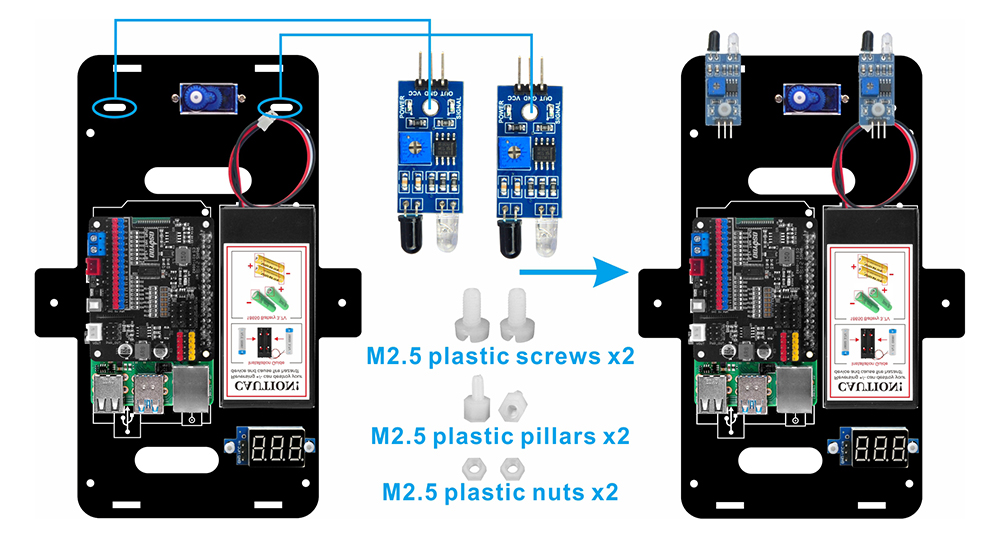
13) Fixez deux capteurs de distance IR à l’avant du châssis supérieur à l’aide de deux vis plastique M2,5, de colonnes plastique M2,5 et d’écrous plastique M2,5. Pour bien fixer les capteurs, il est recommandé d’installer la colonne plastique avec l’extrémité mâle vers le haut.
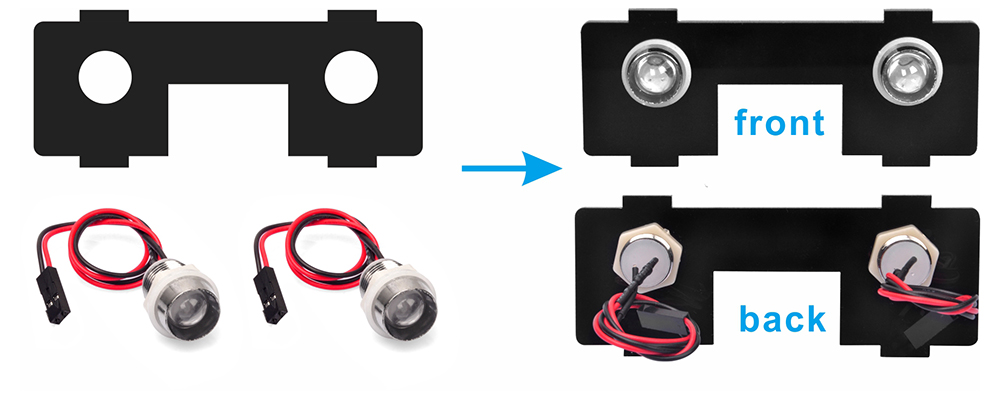
14) Montez deux LED sur la plaque barrière avant, comme indiqué sur le schéma.
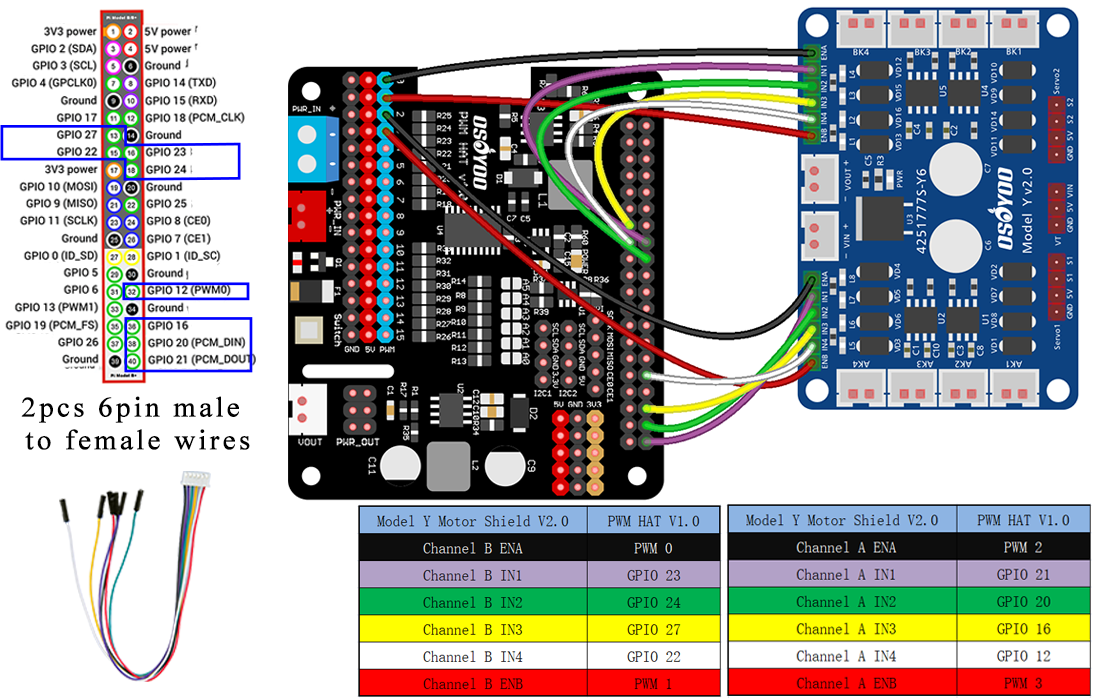
15) Connectez la carte OSOYOO Model Y au shield OSOYOO PWM HAT à l’aide de 2 câbles cavaliers à 6 broches femelle-femelle. Les câbles à 6 broches de la zone B doivent passer par l’orifice situé près du servo SG90 ; les autres câbles à 6 broches de la zone A doivent passer par l’orifice situé près du voltmètre.
Attention :
Pour insérer ou retirer la fiche à 6 broches de la prise mâle à 6 broches de la Model Y, tenez toujours le support en plastique de la fiche. Ne jamais tirer sur les câbles pour débrancher la fiche, cela les endommagerait.
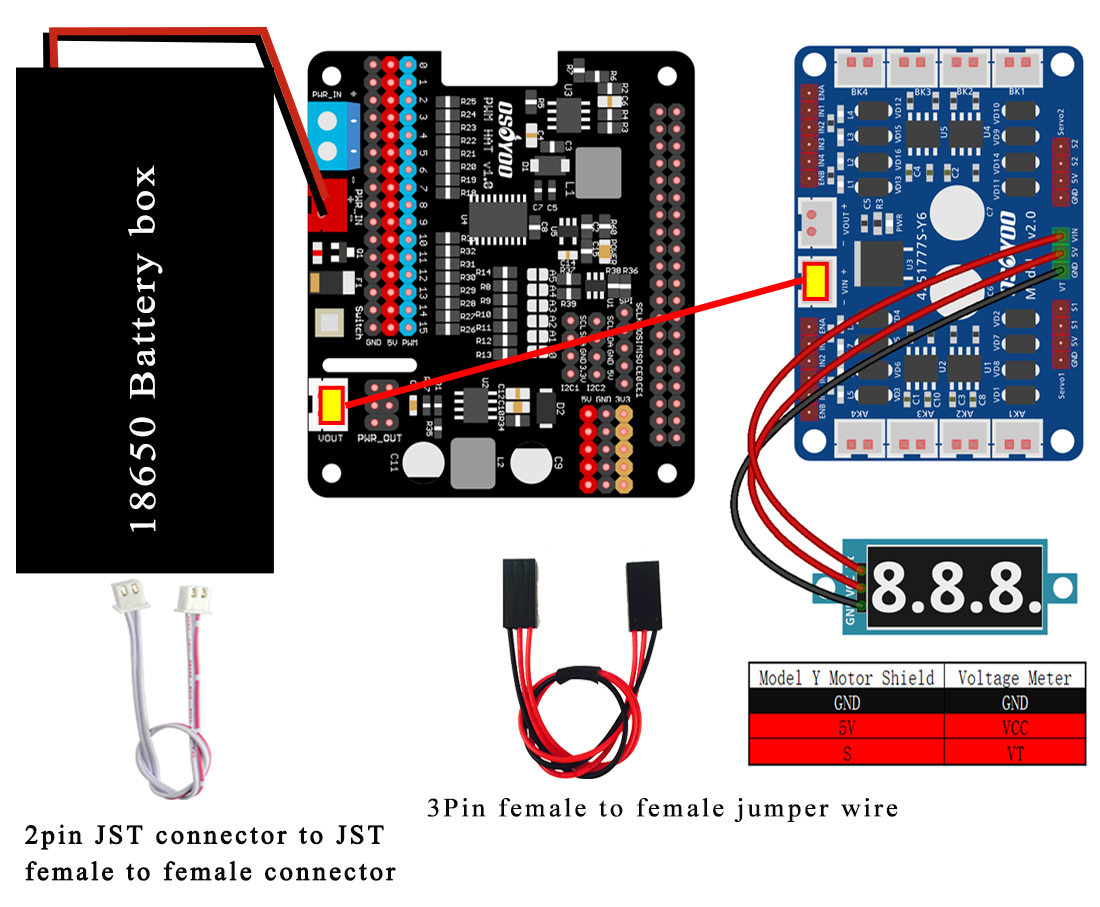
16) Connectez le voltmètre à la carte OSOYOO Model Y à l’aide d’un câble cavalier à 3 broches femelle-femelle, comme indiqué sur le schéma de connexion ci-dessous.
Connectez la prise 12V–GND de la carte OSOYOO Model Y à la prise VIN–GND à l’aide du câble PnP OSOYOO à 2 broches (20 cm), comme indiqué sur le schéma suivant.
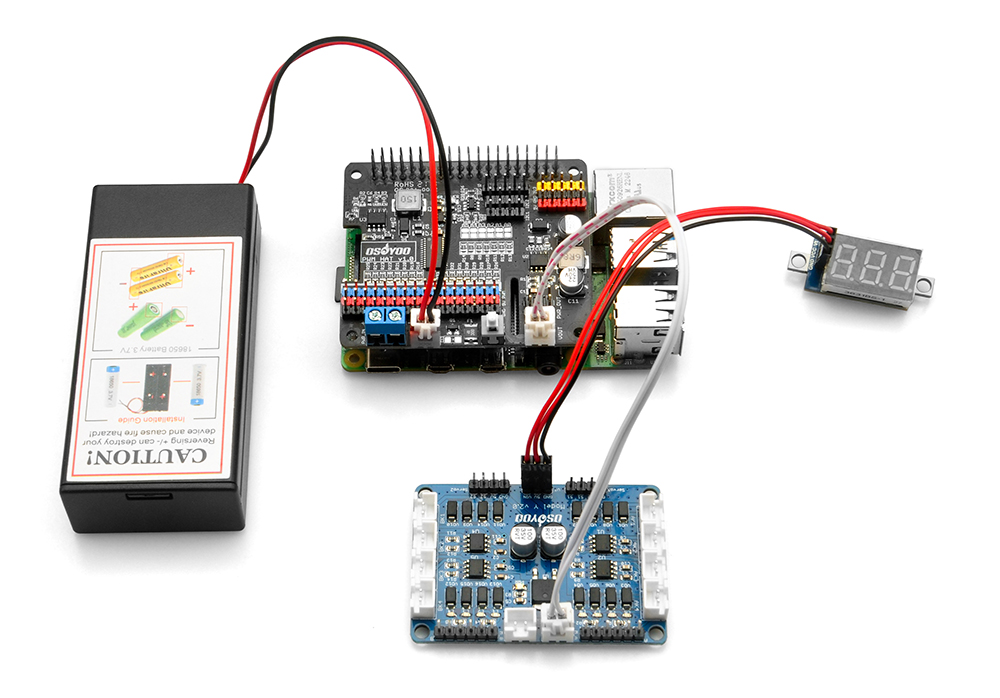
Connectez le boîtier de batteries à la prise VIN–GND du shield OSOYOO UART WiFi selon le schéma de connexion ci-dessous.
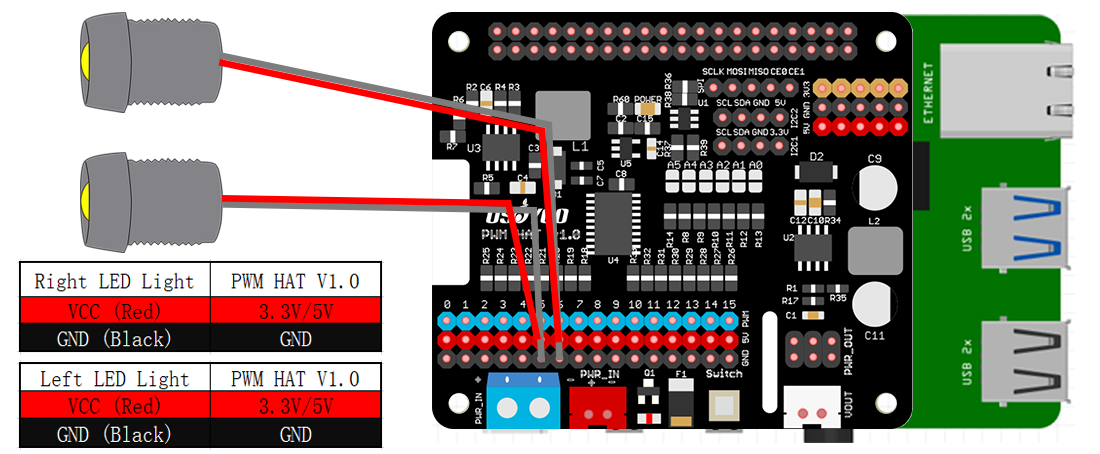
17) Montez 2 LED sur le diaphragme transversal avant.
Connectez les fils rouges (VCC) des LED aux broches 3,3 V ou 5 V, et les fils noirs (GND) aux broches GND du shield OSOYOO PWM HAT.
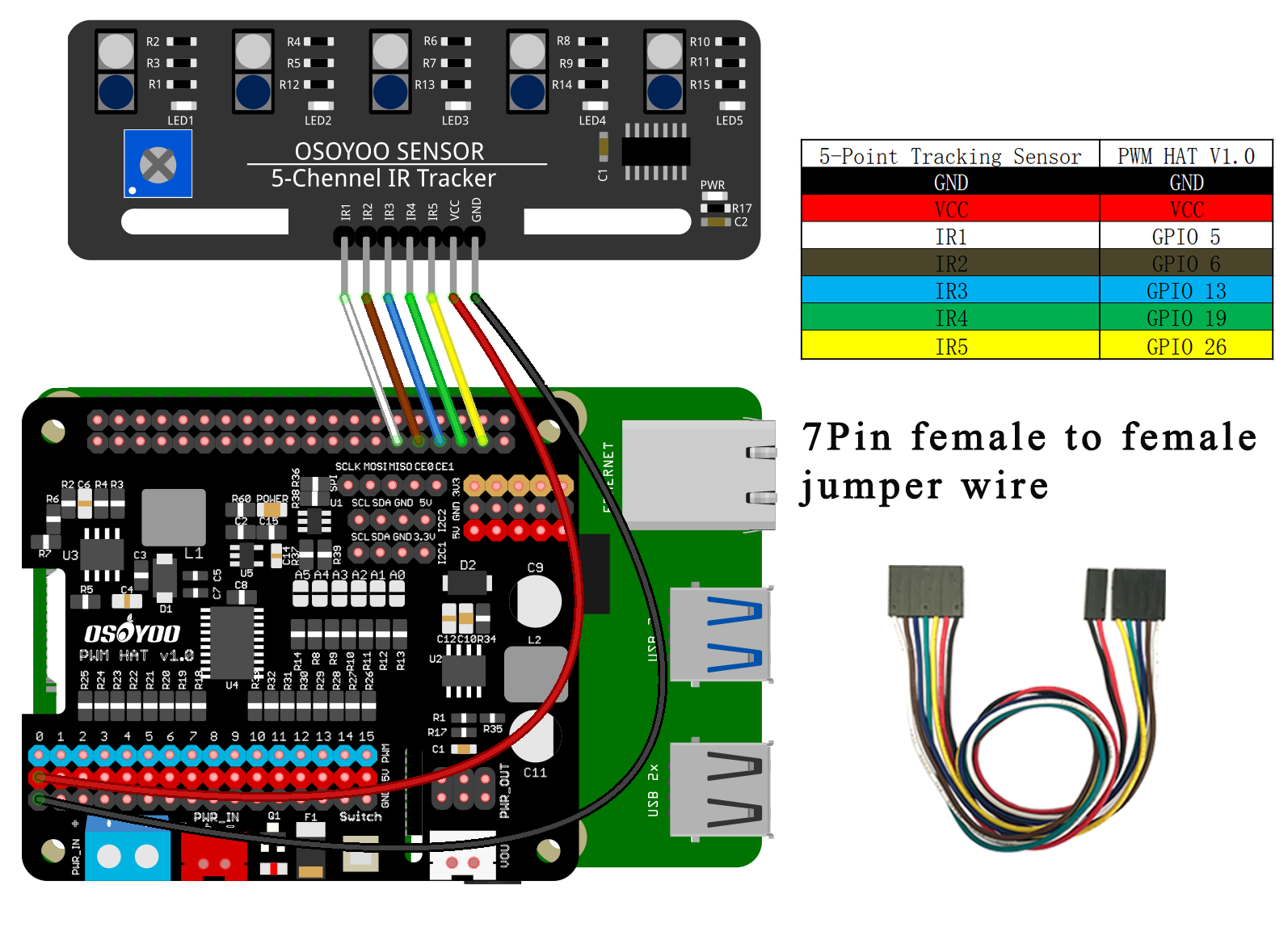
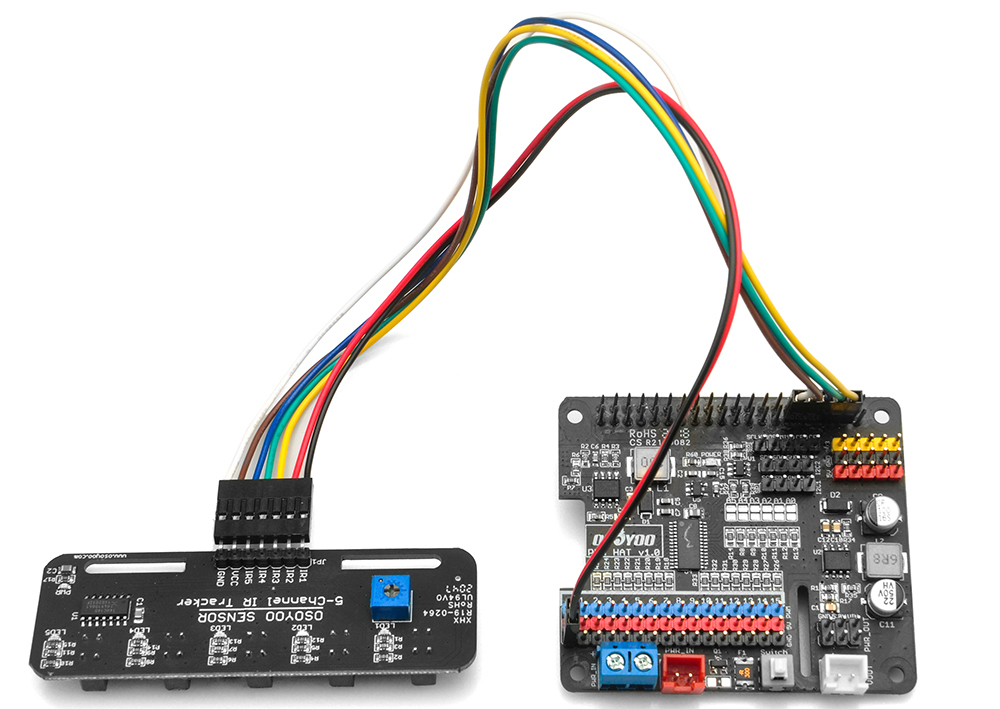
18) Connectez les broches GND–VCC du module de capteur de suivi aux broches GND–5V du shield OSOYOO PWM HAT. Connectez IR1, IR2, IR3, IR4 et IR5 à GPIO5, GPIO6, GPIO13, GPIO19 et GPIO26 à l’aide d’un câble femelle-femelle à 7 broches de 25 cm, comme indiqué ci-dessous.
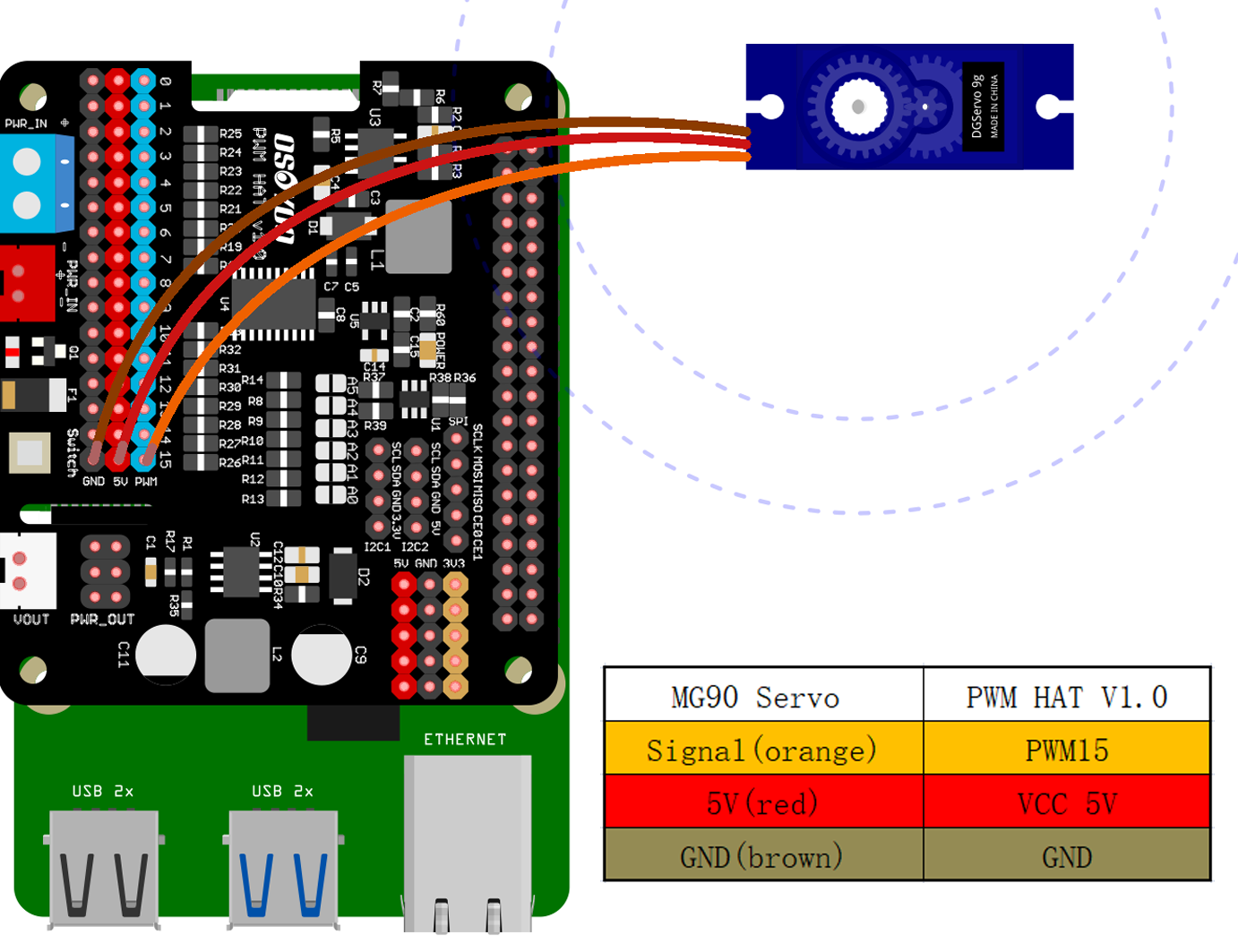
19) Connectez le servo-moteur SG90, la carte OSOYOO Model Y et le OSOYOO PWM HAT selon le schéma suivant.
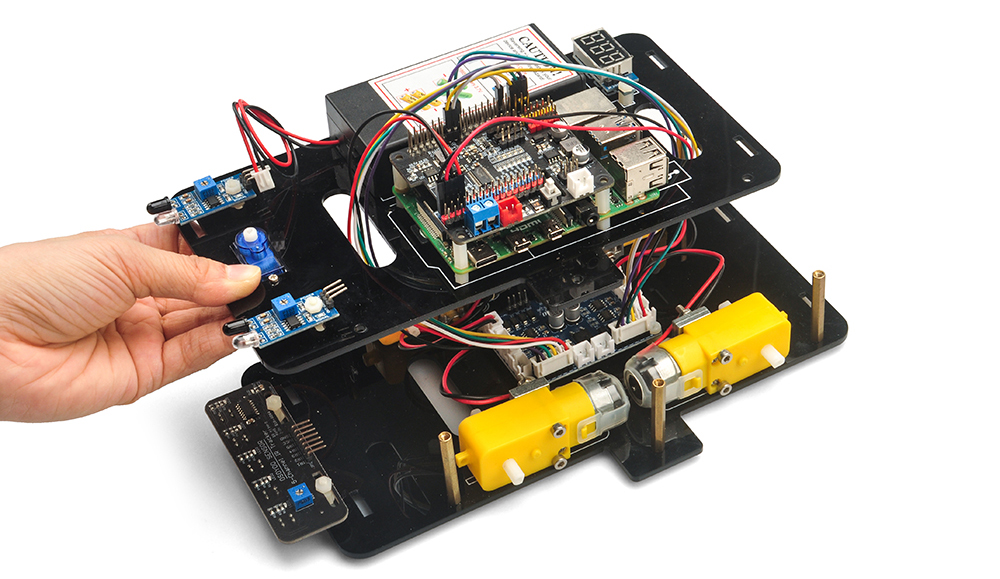
20) Assurez-vous que toutes les connexions de circuit nécessaires sont effectuées avant d’assembler les châssis supérieur et inférieur. Fixez ensuite le châssis supérieur au châssis inférieur à l’aide de 6 vis hexagonales M3×10.
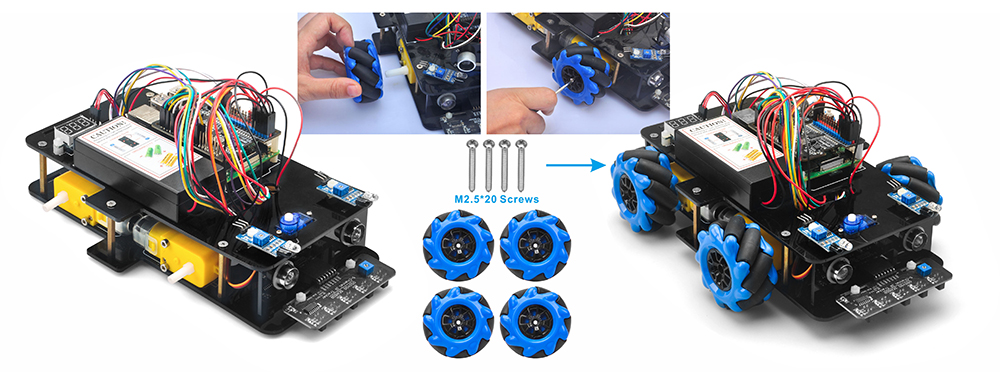
21) Installez 4 coupleurs flexibles et roues sur les moteurs à l’aide de 4 vis M2,5×20 ou M2,6×20. Assurez-vous que le coupleur blanc est complètement inséré dans le bas du moteur jaune.
22) Installez les 4 roues sur les moteurs à l’aide de 4 vis M2,5×20 ou M2,6×20.
Remarque : il existe deux types de roues. Disposez-les de sorte que les galets soient inclinés vers le centre du robot lorsqu’on les regarde de dessus.
Il existe deux types de roues Mecanum — gauche et droite — et la différence entre elles réside dans l’orientation des galets. Pour une roue Mecanum de type A, comme illustré ci-dessous, les galets sont orientés de bas-droite vers haut-gauche. Les galets des roues de type B sont installés dans le sens opposé.
Une configuration correcte exige que chacune des quatre roues soit positionnée de sorte que l’axe de rotation du galet supérieur de chaque roue pointe vers le centre de la plateforme. Veuillez noter que toutes les analyses dynamiques et les codes préétablis sont basés sur cette configuration.
L’assemblage matériel est maintenant terminé. Avant d’insérer les batteries 18650 dans le boîtier, vous devez d’abord télécharger et exécuter l’exemple de code sur votre Raspberry Pi. La leçon suivante couvre cela en détail.