In questa lezione, useremo il cellulare per controllare la nostra auto robot e fare un’imitazione di guida. Poiché si tratta di una finta guida, utilizzeremo un volante e un cambio virtuali nella nostra APP per imitare le loro controparti nella macchina reale.
È necessario completare la lezione 1 (montaggio dell’auto) prima di proseguire con questa lezione.
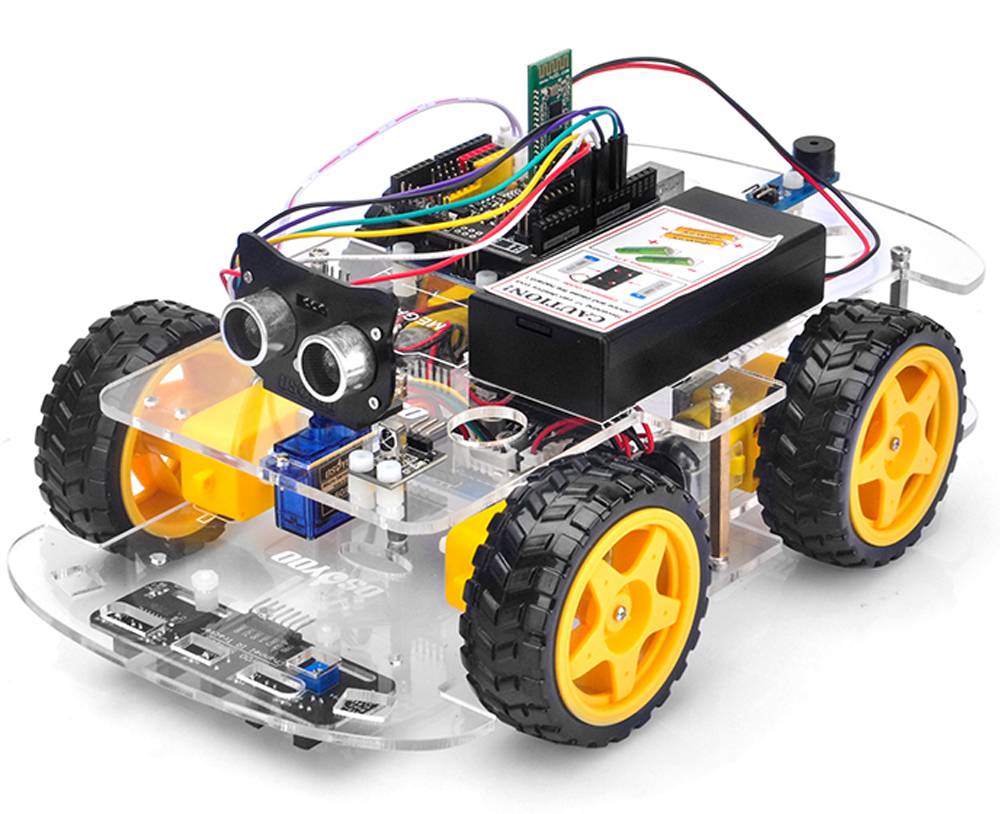
Parti e dispositivi
Installazione dell’hardware
Passo 1: Installare il telaio di base della smart car come indicato nella Lezione 1 sulla smart car. Se avete già completato l’installazione nella Lezione 1, rimuovete tutti i fili sulla scheda di base di Osoyoo.
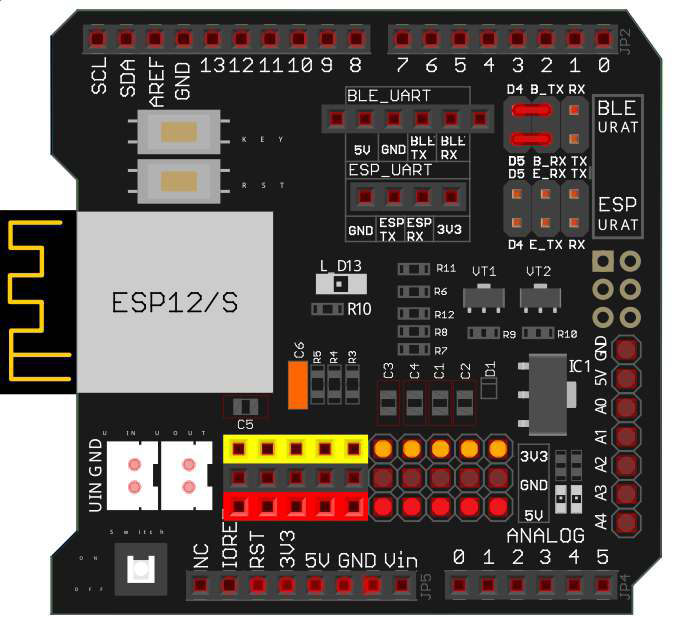
Passo 2: Collegare le porte TX/RX di Bluetooth a D4, D5 con i tappi a ponticello
Nota: la nostra shield WiFi Uart V1.3 di OSOYOO è collegata alle porte BLE URAT TX/RX a D4, D5 con i ponticelli per impostazione predefinita. Se si scopre che le porte TX/RX Bluetooth non sono collegate a D4, D5, è necessario utilizzare un cappuccio o un filo di ponticello per collegare B-TX a D4 e B-RX a D5.
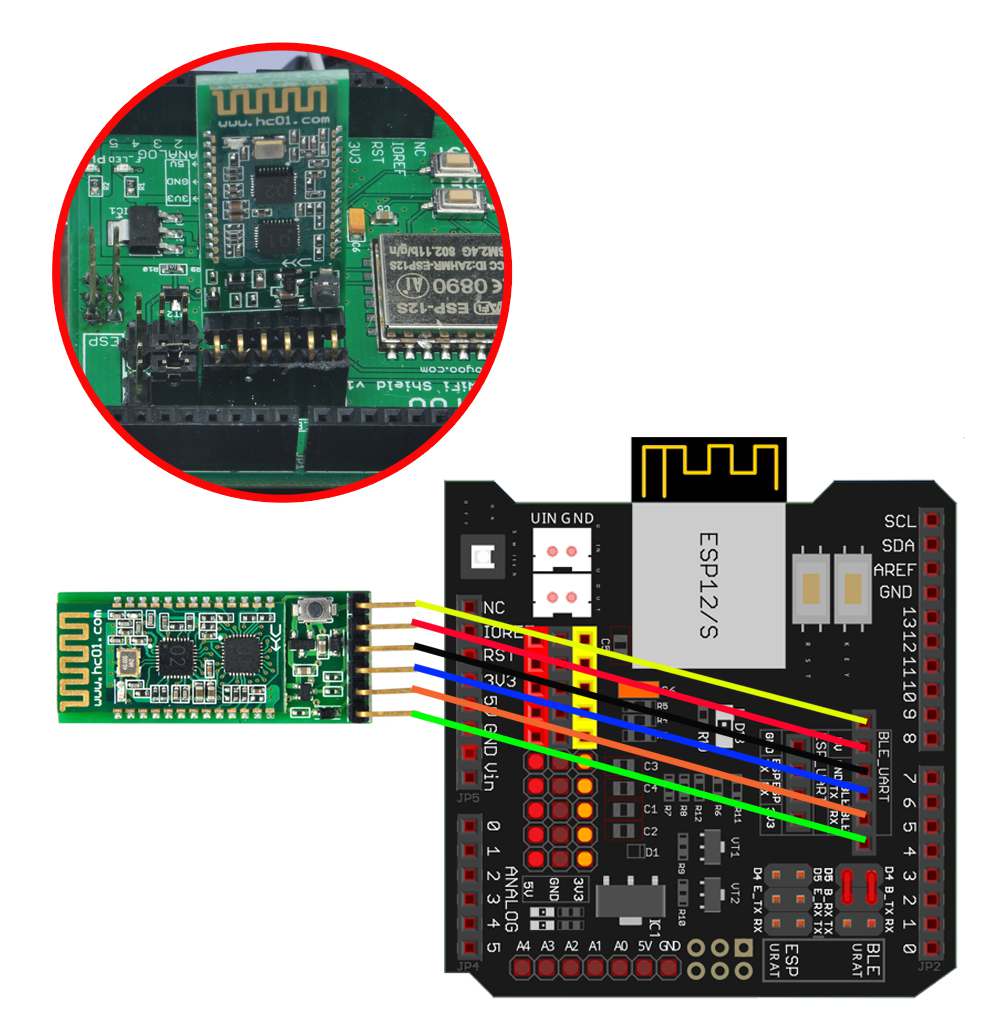
Passo 3: Inserire il modulo Bluetooth nello slot Bluetooth di OSOYOO Uart WiFi shield V1.3 come da grafico seguente
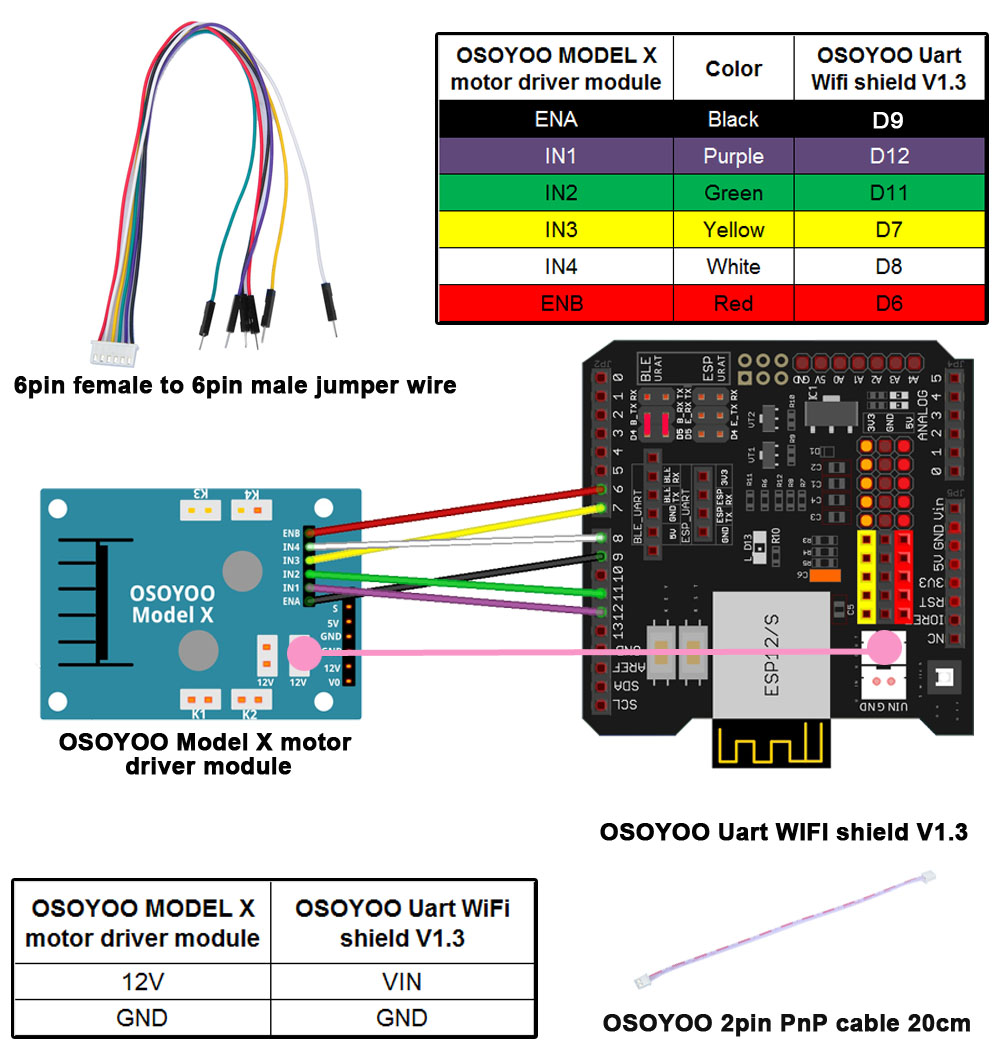
Passo 4: Collegare il modulo driver motore OSOYOO MODEL X e OSOYOO Uart WiFi shield V1.3 come da grafico seguente:
Ricordate i seguenti suggerimenti per riportare il sistema di controllo motorio alla lezione 1:
- Se l’ultimo progetto è la lezione 1,2,3,4, il sistema di controllo del motore è lo stesso della lezione 1, non è necessario fare nulla.
- Se l’ultimo progetto è la lezione 5,6, è necessario cambiare il filo ENA da D3 a D9, mantenere il cablaggio in D6,D7,D8,D11,D12 nella stessa posizione e rimuovere tutti gli altri fili in OSOYOO Uart WiFi shield V1.3.
Suggerisco di eseguire il codice dello sketch nella Lezione 1 e di verificare che il collegamento del motore sia corretto. Questo è molto importante per le fasi successive.
Installazione del software:
Passo 1: Installare l’APP nel telefono cellulare:
1) Installare l’APP sul dispositivo Android come segue
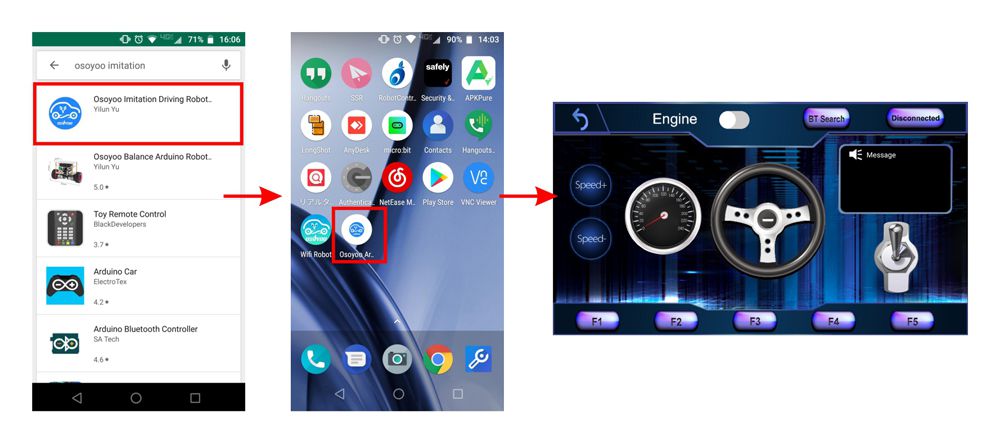
Cercate su Google Play Store il nome dell’APP “OSOYOO imitazione di guida”, scaricate l’APP come segue e installatela sul vostro smartphone.
Se non è possibile utilizzare Google Play per trovare l’applicazione, scaricare l’applicazione dal seguente link :https://osoyoo.com/driver/v1car.apk.
2) Installare l’APP sul dispositivo Apple IOS come segue
Cercate nell’APP store di Apple il nome dell’APP “OSOYOO imitazione di guida”, scaricate l’APP come segue e installatela nel vostro smartphone.

Passo 2: Scaricare e installare il codice di schizzo da v2smartcar-lesson7. Decomprimete questo file e vedrete una cartella chiamata v2smartcar-lesson7. Aprire l’IDE -> fare clic su file -> fare clic su Apri -> scegliere il codice “v2smartcar-lesson7.ino” nella cartella v2smartcar-lesson7, caricare il codice nella scheda.
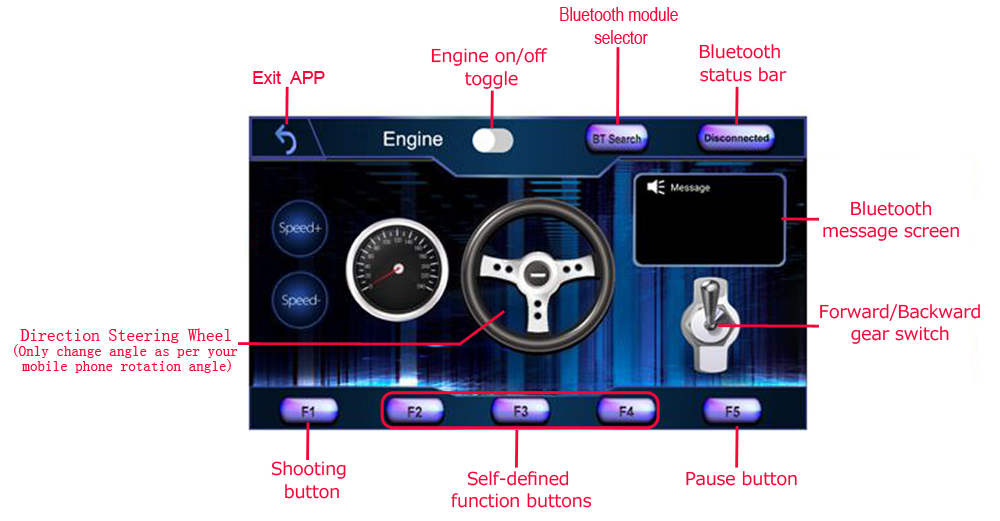
 Spiegazione dell’interfaccia utente dell’APP
Spiegazione dell’interfaccia utente dell’APP
-
- Collegare il bluetooth HC al telefono Android. Nell’applicazione Android è presente un pulsante BT Search: quando si fa clic su questo pulsante, viene visualizzato un elenco di dispositivi Bluetooth che sono stati accoppiati con l’applicazione. Selezionare il dispositivo HC-02 per collegare l’auto, Una volta collegato l’HC-02, lo stato del Bluetooth passerà da Disconnesso a Connesso. È possibile controllare l’auto solo quando il Bluetooth è connesso.
- Per collegare il bluetooth dell’HC-02 all’iPhone/iPad , è sufficiente fare clic sul pulsante Connect un dispositivo HC-02 apparirà in un elenco a comparsa. Fate clic sul dispositivo HC per collegare il modulo Bluetooth al vostro iPhone. Quindi il pulsante Connetti cambierà nome inDisconnect.
- Comando del motore : Quando la levetta del motore è impostata su OFF (bianco), l’auto si ferma e tutti i pulsanti dell’APP sono disabilitati. Quando la levetta del motore è impostata su ON (rosso), la macchina inizia a muoversi. Tutti gli altri pulsanti di controllo del movimento saranno attivi.
- Interruttore marcia avanti/indietro: Questo interruttore di marcia può controllare l’auto si muove in avanti o in retromarcia come marcia auto reale.
- F1,F2,F3,F4,F5 pulsante personalizzato. In questa lezione utilizziamo solo F5, che mette in pausa il movimento dell’auto. La differenza tra F5 e il pulsante Engine OFF è che quando si tocca il pulsante Engine OFF, tutti gli altri pulsanti vengono disabilitati. Per abilitare gli altri pulsanti è necessario attivare nuovamente il pulsante Motore. D’altra parte, quando si fa clic su F5, l’auto si ferma ma tutti gli altri pulsanti sono ancora attivi. Anche se non si tocca alcun pulsante, basta cambiare la posizione dell’angolo del cellulare (come se si muovesse il volante) e l’auto si muoverà nuovamente.
- Volante di direzione : Quando si ruota l’angolo del telefono cellulare, il volante cambia angolo in base all’angolo di rotazione del telefono. In questo modo l’auto cambierà direzione. Ad esempio, quando il volante ruota in senso orario, l’auto si sposta a sinistra. Ricordate che lo sterzo e la marcia avanti/indietro devono funzionare insieme come se steste guidando un’auto vera. Ad esempio, se si vuole tornare indietro in un parcheggio sul lato destro, è necessario impostare la marcia in posizione R e ruotare lo sterzo in senso orario.
- Speed+: Fate accelerare l’auto robotica
- Speed-: Far rallentare l’auto robotica
Collegare l’APP al modulo Bluetooth HC-02
- Connettersi con il dispositivo Android:
Se si utilizza un dispositivo Android e non si è accoppiato il modulo Bluetooth con il telefono cellulare, accoppiare prima il modulo Bluetooth prima di aprire l’APP. In Impostazioni del telefono cellulare-> Bluetooth, trovare un dispositivo Bluetooth chiamato HC02, accoppiarlo con la password 1234. Dopo aver accoppiato il dispositivo Bluetooth HC02, aprire l’APP. Fare clic sul pulsante di ricerca BT per collegare l’APP al dispositivo HC02.
- Connettersi con il dispositivo iOS:
Se si utilizza un dispositivo iOS, è sufficiente aprire l’applicazione, fare clic sul pulsante Connetti, verrà visualizzato un elenco di dispositivi Bluetooth, selezionare il dispositivo HC02.
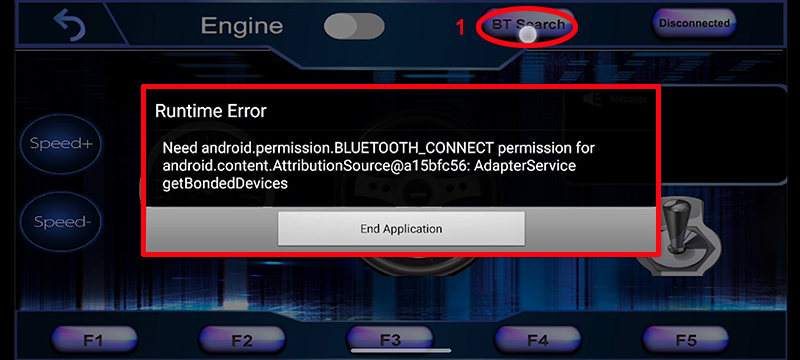
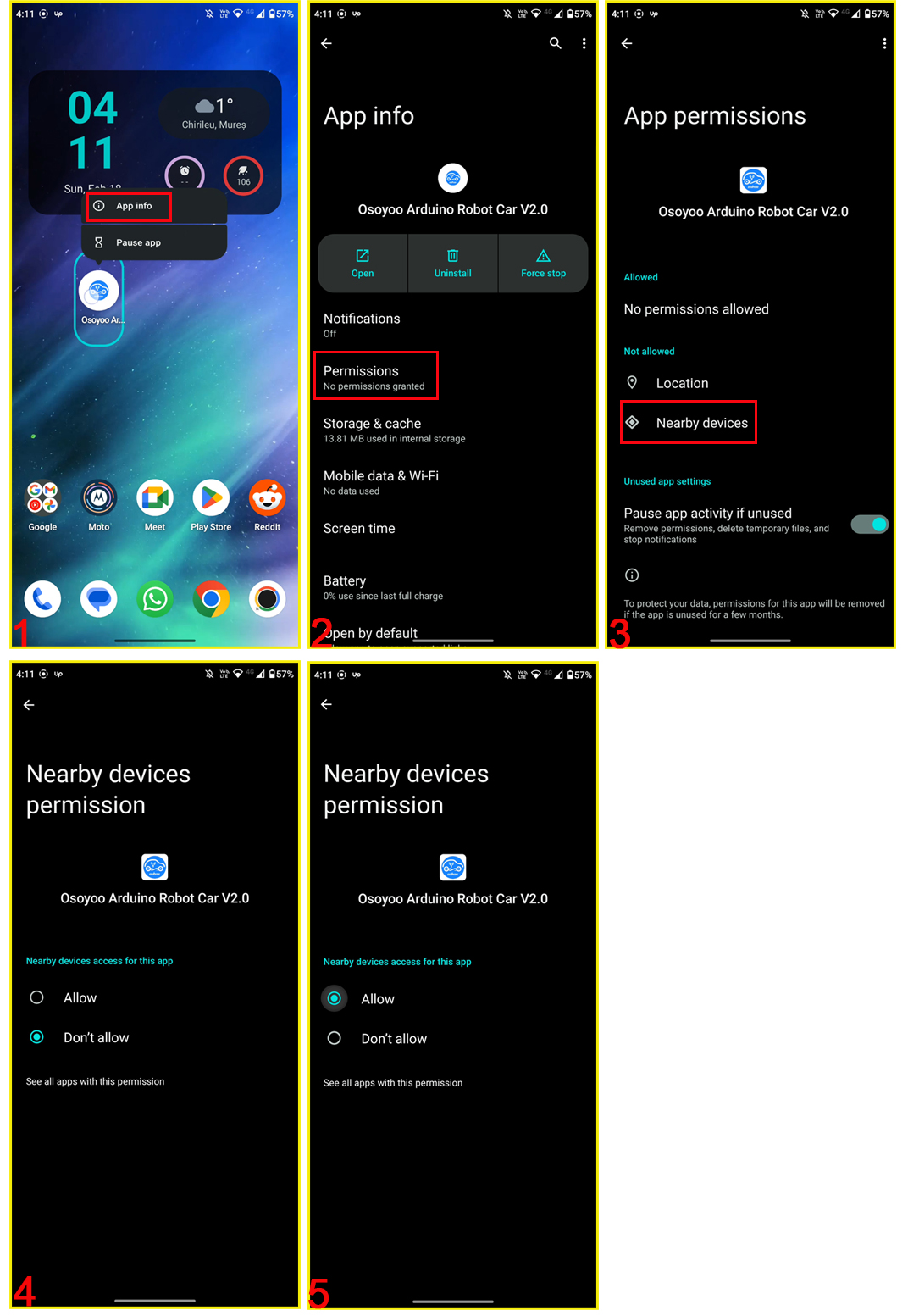
Nota: per i dispositivi Android, quando si fa clic sul pulsante di ricerca BT e viene visualizzato il seguente messaggio di errore, seguire i passaggi successivi:
- premere a lungo l’icona APP, quindi fare clic su “Informazioni APP”
- fai clic su “Autorizzazioni”
- fai clic su “Dispositivo nelle vicinanze”, quindi modifica l’opzione in “Consenti” (per ulteriori informazioni sulle impostazioni, puoi visitare il video: https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson7/APP.mp4)
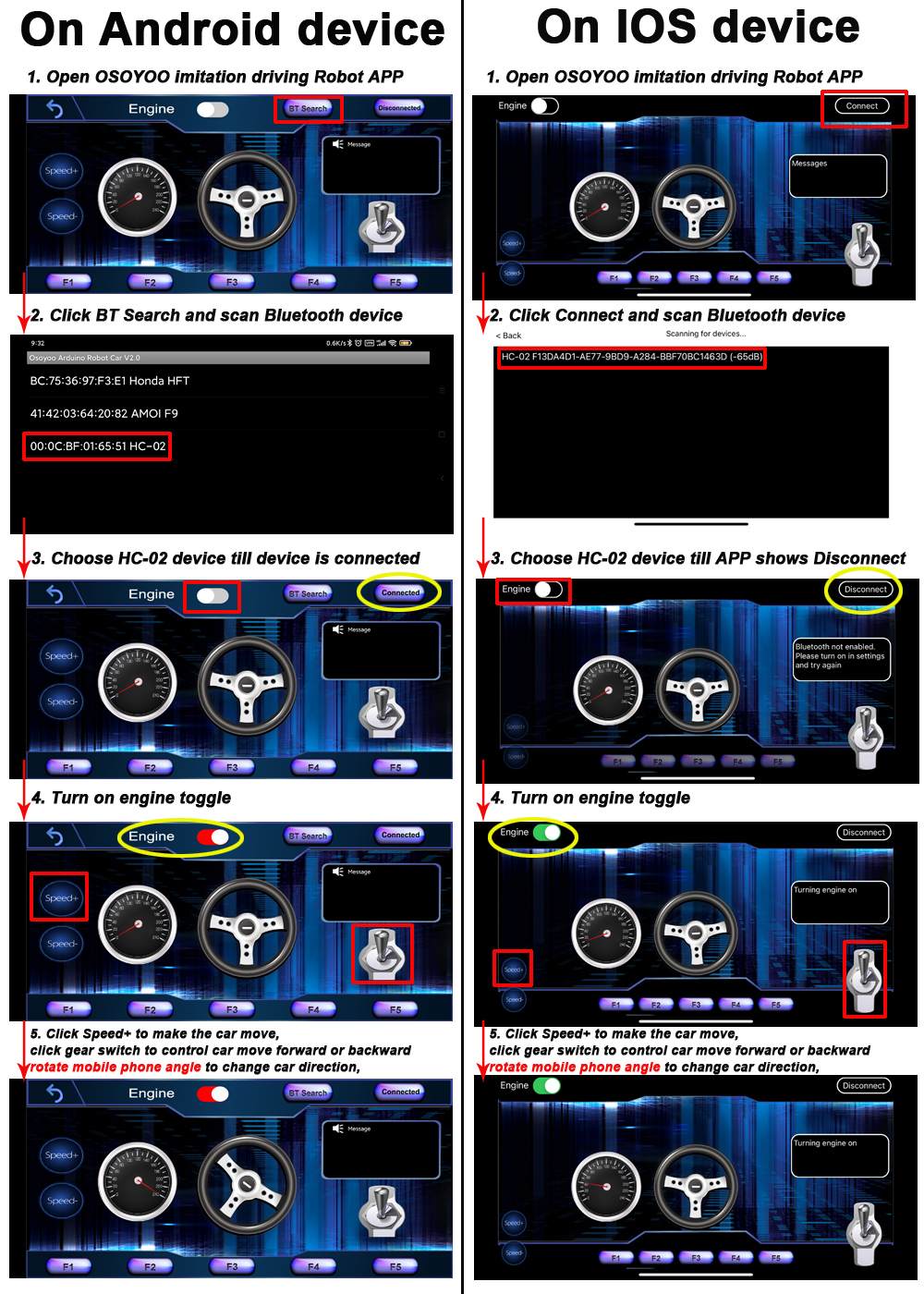
Guida la tua auto robot
Ora che avete installato l’hardware e il software per questa lezione, mettiamo in moto la nostra auto!
Passo 1)Posizionare l’auto robot a terra e accendere l’interruttore.
Passo 2)Andare sul cellulare ->Impostazione ->Impostazione Bluetooth e cercare un dispositivo Bluetooth chiamato HC-02, accoppiarlo con il codice 1234.
Passo 3)Aprire OSOYOO imitazione di guida Robot APP, fare clic sul pulsante BT Search e trovare il bluetooth che avete accoppiato
Passo 4)Attivare la levetta del motore, fare clic su Speed+ per far accelerare il robot, che all’inizio è molto lento. Quando si ruota l’angolo del cellulare, l’auto cambia direzione.
Godetevi la guida!

















Hello! Me and my son have just hooked up our OSOYOO as the directions provide. We ran the lesson 1 code to check the motors are working properly. We can connect the iOS app to the HC-02, but cannot get the engine to start. We checked everything over and cannot find our error. Any ideas?
Please click speed+ several times to make the robot car move quickly.
please provide the screenshot when you operate the APP.
Hi Elaine,
I have a small problem with Lesson 7. I have completed all connections and downloaded the App to my android phone. The BT-search finds HC-02 and App connects. I can start engine, run the car forward and back with toggle control and pause the car with button F. However the steering wheel does not work. Have you any suggestions?
Regards, James Robb.
hi, James,
The way you rotate your cell phone may be wrong. You need to rotate the cell phone vertically not horizonlly. Please see our video.
If it doesn’t work yet, please tell me which version Android IOS of your phone.
Elaine
HI Elaine,
I have already tried all movements of the phone. I have a Blackview A50 mobile phone (no sim card) only used as controller. It has Android 11 o/s.