En esta lección usaremos un móvil para controlar nuestro auto robot y hacer una conducción por imitación. Dado que es un simulacro de conducción, utilizaremos un volante y un engranaje virtual en nuestra aplicación para imitar a sus contrapartes de un automóvil real.
Debe completar la Lección 1 (ensamblar el auto robot) antes de continuar con esta lección.
Partes y dispositivos
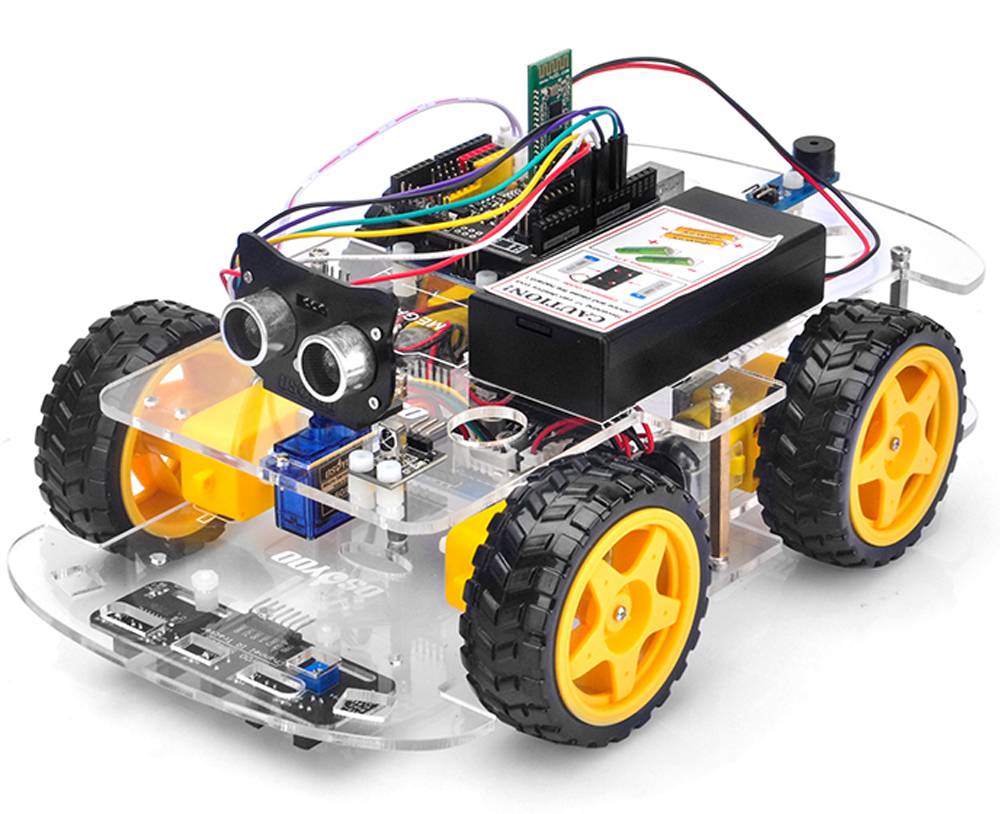
Instalación del hardware
Paso 1 : instale el marco básico del auto robot inteligente según la Lección 1 del robot inteligente. Si ya ha completado la instalación en la Lección 1, retire todos los cables de la placa básica de OSOYOO.
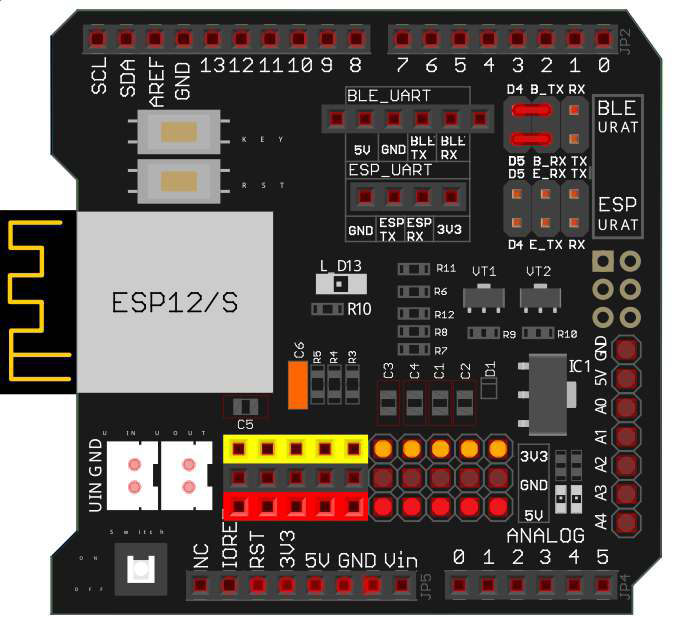
Paso 2: conecte los puertos Bluetooth TX/RX a los pines D4 y D5 con un puente.
Nota: Nuestro escudo OSOYOO Uart WiFi V1.3 está conectado a los puertos BLE URAT TX/RX a D4 y D5 con un puente de forma predeterminada. Si encuentra que los puertos Bluetooth TX/RX no están conectados a D4 y D5, necesita usar una tapa de puente o un cable de puente para conectar B-TX a D4 y B-RX a D5.
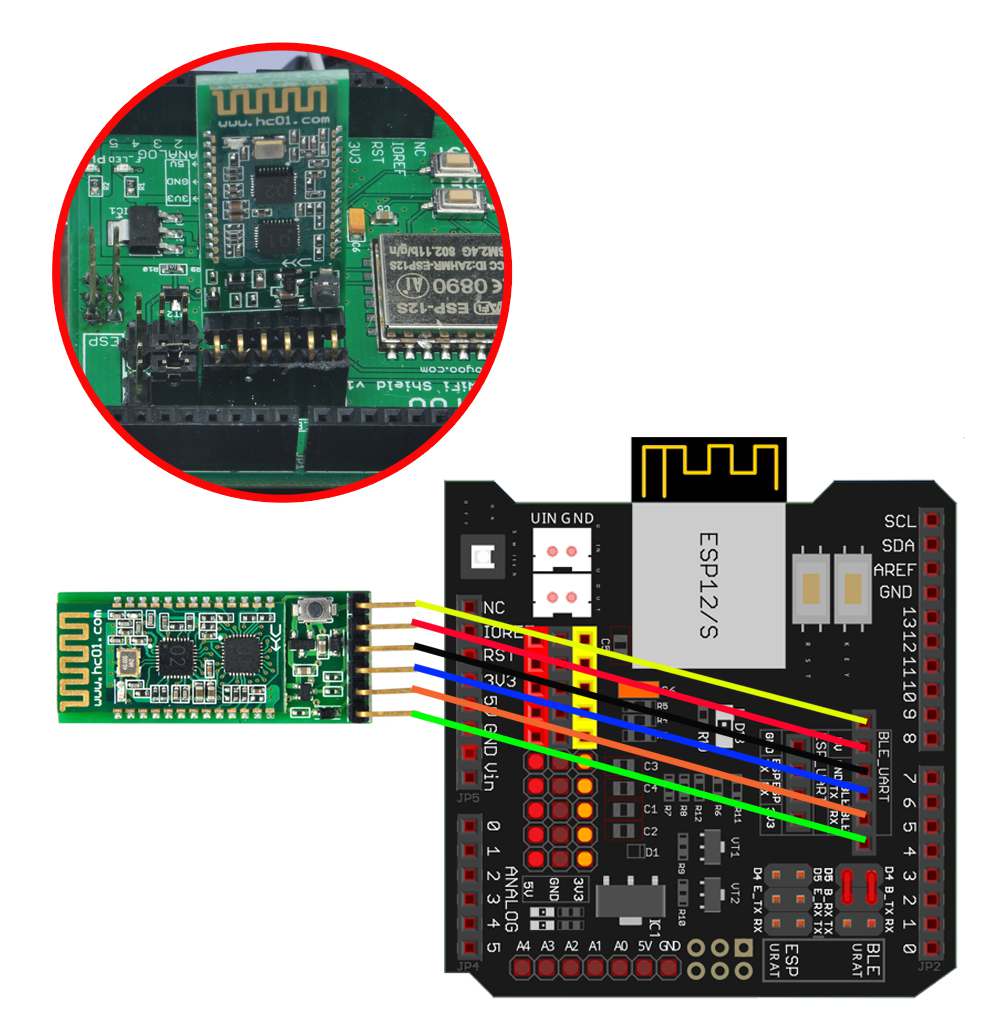
Paso 4: Inserte el módulo Bluetooth en el escudo OSOYOO Uart WiFi V1.3 en la ranura Bluetooth como se muestra en el siguiente gráfico:
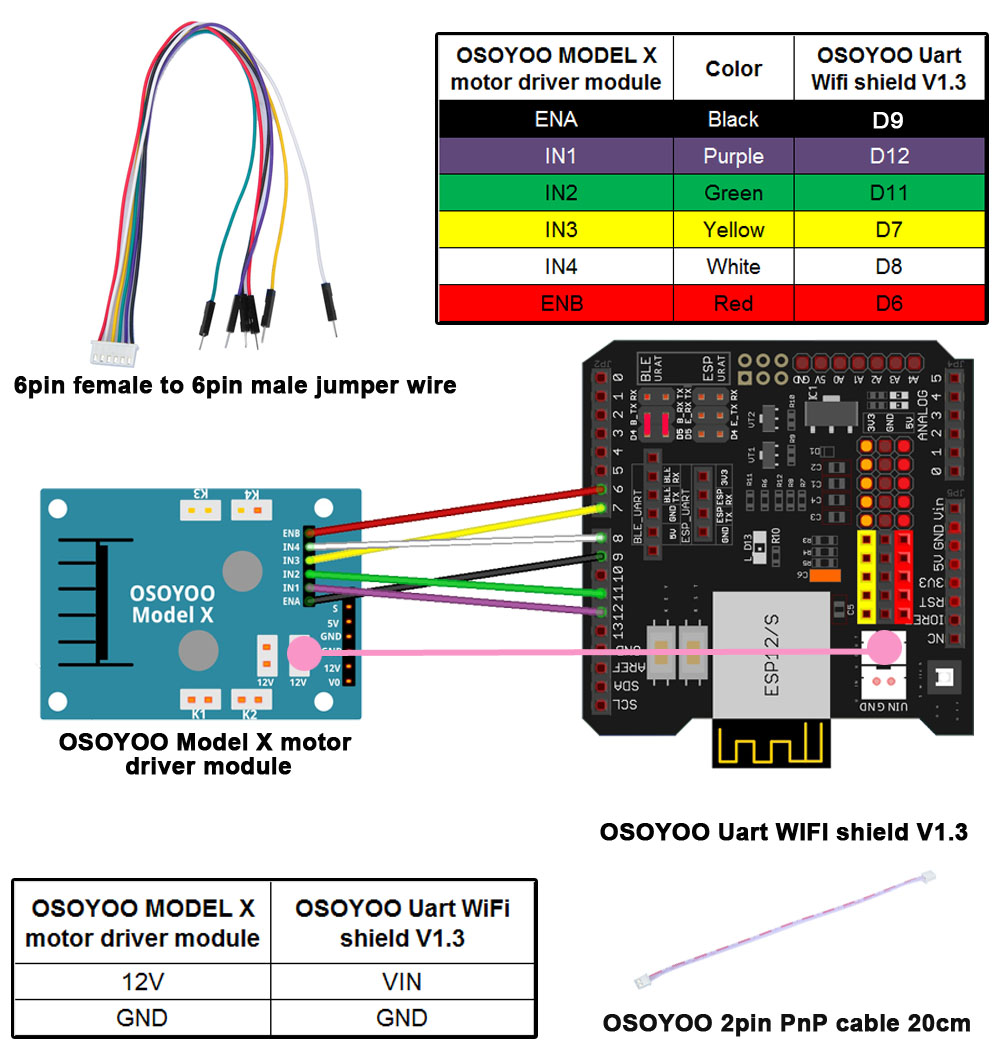
Paso 3: conecte el módulo controlador del motor OSOYOO modelo X y el escudo OSOYOO Uart WiFi V1.3 como se muestra a continuación:
Recuerde los siguientes consejos para restaurar su sistema de control de motores a la Lección 1:
- si su último proyecto es la Lección 1,2,3,4, su sistema de control de motor es el mismo que el de la Lección 1 y no es necesario que haga nada.
- si su último proyecto es la Lección 5,6 entonces necesita cambiar el cable ENA de D3 a D9, mantener el cableado D6, D7, D8, D11, D12 en la misma posición y quitar todos los demás cables en el escudo OSOYOO Uart WiFi V1.3
Le sugiero que ejecute el código de la Lección 1 y se asegure de que la conexión del motor sea correcta, esto es muy importante para los próximos pasos.
Instalación del software
Paso 1: instale la aplicación en su teléfono móvil:
1) instale la aplicación en el dispositivo Android de la siguiente manera:
En la tienda Google Play, busque el nombre de la APLICACIÓN “OSOYOO conducción por imitación”, descargue la Aplicación de la siguiente manera e instálela en su teléfono inteligente.
Si no puede usar Google Play para encontrar la aplicación, descargue la aplicación desde el siguiente enlace: https://osoyoo.com/driver/v1car.apk .
2) instale la aplicación en el dispositivo Apple IOS de la siguiente manera
En la tienda de aplicaciones de Apple, busque el nombre de la aplicación “OSOYOO imitación de conducción”, descargue la aplicación de la siguiente manera e instálela en su teléfono inteligente
Paso 2: descargue e instale el código de boceto de v2smartcar-lesson7 . Descomprima este archivo y verá una carpeta llamada v2smartcar-lesson7. Abra IDE -> haga clic en archivo -> haga clic en Abrir -> elija el código “v2smartcar-lesson7.ino” en la carpeta v2smartcar-lesson7 y luego cargue el código en su placa.

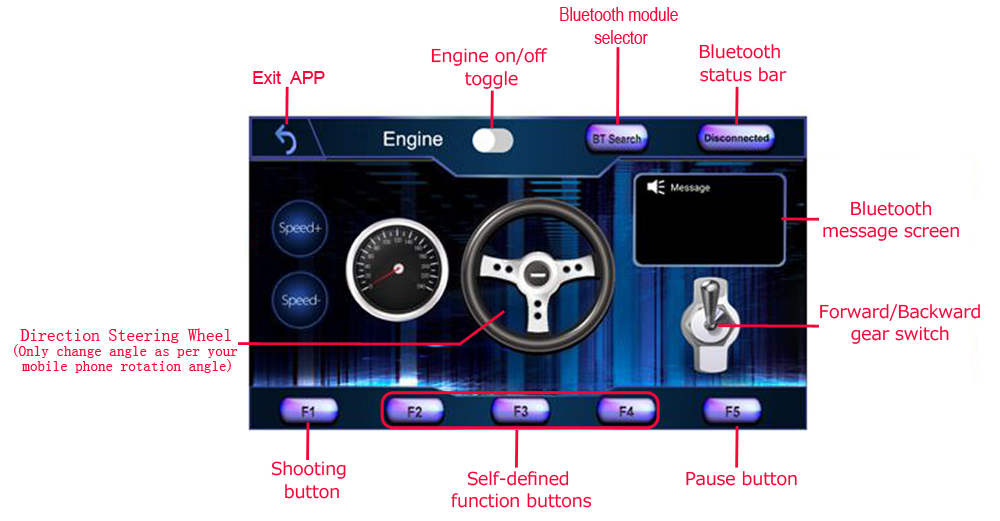
Explicación de la interfaz de usuario de la aplicación
-
- Conecte el Bluetooth HC-02 en el teléfono Android: hay un botón de búsqueda de BT en la aplicación de Android: cuando haga clic en este botón, verá una lista de dispositivos Bluetooth que se han emparejado con su aplicación. Seleccione el dispositivo HC-02 para conectar el auto robot. Una vez que el HC-02 esté conectado, el estado del Bluetooth cambiará de Desconectado a Conectado. Solo puede controlar su robot cuando el Bluetooth está conectado.
- Conecte el módulo Bluetooth HC-02 en iPhone/iPad: simplemente haga clic en el botón Conectar , aparecerá un dispositivo HC-02 en una lista emergente. Haga clic en ese dispositivo HC-02 para conectar el módulo Bluetooth a su iPhone. Luego el botón Conectar cambiará de nombre a Desconectar.
- Alternancia del motor: cuando la alternancia del motor está en APAGADO (blanco), el auto robot se detendrá y todos los botones de la aplicación se desactivarán. Cuando la palanca del motor está en ENCENDIDO (rojo), el robot comenzará a moverse. Todos los demás botones de control de movimiento estarán activos.
- Interruptor de movimiento adelante/atrás: este interruptor de marcha puede controlar que el robot se mueva hacia adelante o hacia atrás como la marcha real de un auto.
- Botón personalizado F1, F2, F3, F4 y F5: en esta lección sólo usamos F5 que pausa el movimiento del auto robot. La diferencia entre F5 y el botón Engine OFF es que cuando se toca el botón Engine OFF, todos los demás botones se desactivarán. Debe alternar el botón Motor nuevamente para habilitar otro botón. Por otro lado, cuando se hace clic en F5, el robot se detendrá pero todos los demás botones seguirán activos. Incluso si no toca ningún botón, simplemente cambie la posición del ángulo de su teléfono celular (como si moviera el volante), el auto robot se moverá nuevamente.
- Volante de dirección: cuando gira el ángulo de su teléfono móvil, el volante cambiará de ángulo según el ángulo de rotación de su teléfono móvil. Esto hará que tu robot cambie de dirección. Por ejemplo, cuando el volante gira en el sentido de las agujas del reloj, el automóvil se moverá hacia la izquierda. Recuerde, la dirección y el engranaje de avance/retroceso deben funcionar juntos como si estuviera conduciendo un automóvil real. Por ejemplo, cuando desee llevar su robot de regreso a un estacionamiento del lado derecho, debe configurar Gear en la posición R y girar la dirección en sentido contrario a las agujas del reloj.
- Speed+: permite que el auto robot aumente la velocidad.
- Speed- : hace que el auto robot disminuya la velocidad.
Conecte la aplicación al módulo Bluetooth HC-02
- Conéctese con un dispositivo Android: si usa un dispositivo Android y no ha emparejado el módulo Bluetooth con su teléfono celular, primero empareje el módulo Bluetooth antes de abrir la Aplicación. En la Configuración de su teléfono celular -> Bluetooth, busque un dispositivo Bluetooth llamado HC02 y vincúlelo con la contraseña 1234. Después de emparejar el dispositivo bluetooth HC02 abra la Aplicación y haga clic en el botón de búsqueda de BT para conectar la aplicación al dispositivo HC02.
- Conéctese con un dispositivo iOS: si usa un dispositivo iOS, simplemente abra la aplicación, luego haga clic en el botón Conectar y verá una lista de Bluetooth, posteriormente seleccione el dispositivo HC02.
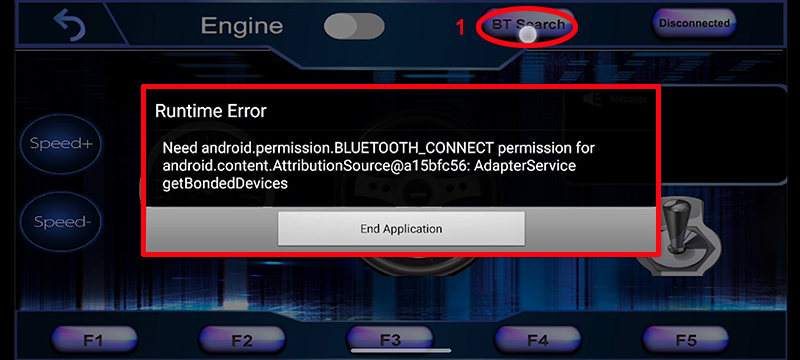
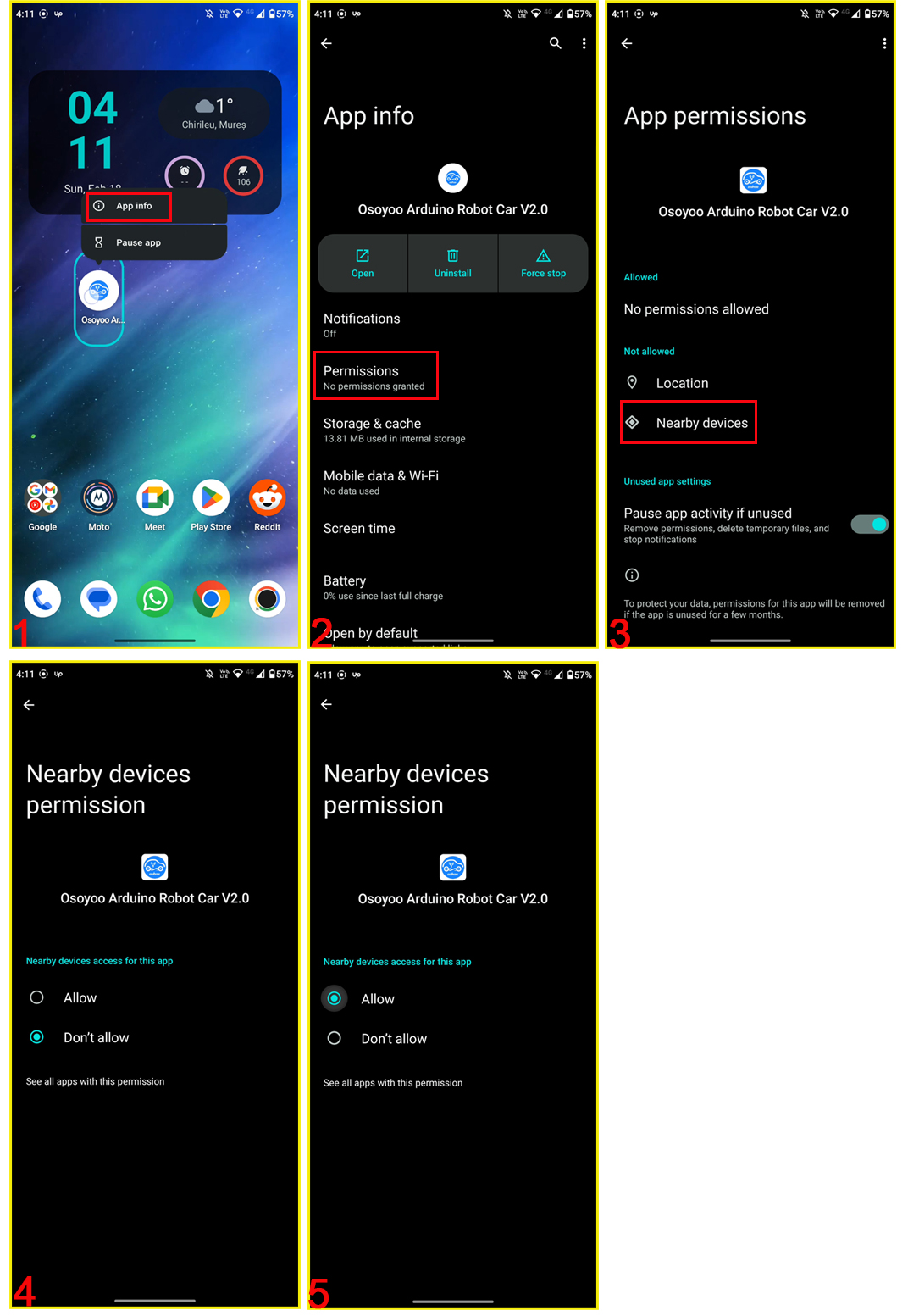
Nota: Para dispositivos Android, cuando hace clic en el botón de búsqueda BT y aparece el siguiente mensaje de error, siga los siguientes pasos:
- Mantenga presionada la entrada de la APLICACIÓN y luego haga clic en “Información de la APLICACIÓN”
- haga clic en “Permisos”
- Haga clic en “Dispositivo cercano”, luego cambie la opción a “Permitir” (para obtener más información sobre la configuración, puede visitar el video: https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson7/APP.mp4)
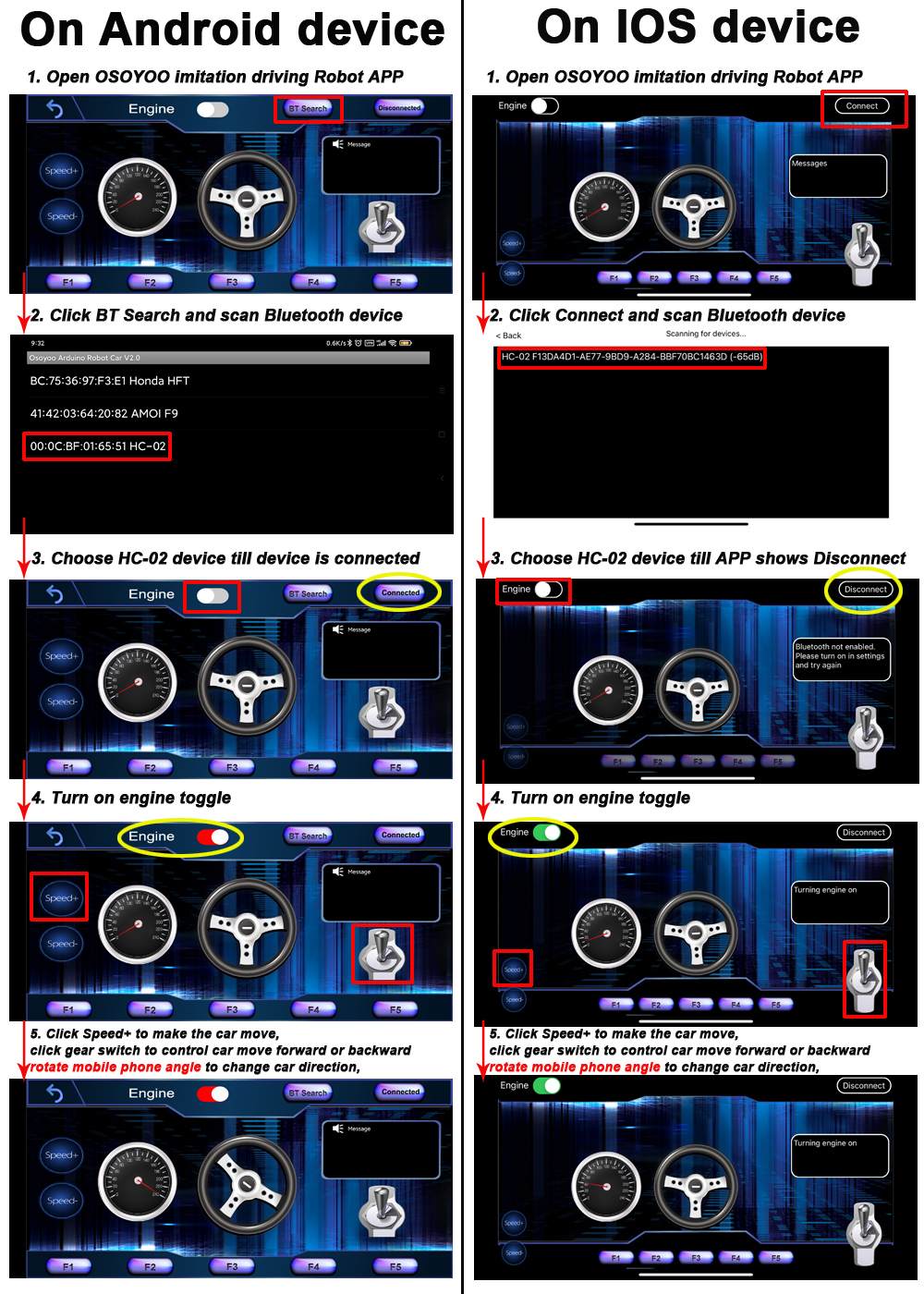
Conduce tu coche robot
Ahora que ha instalado su hardware y software para esta lección, ¡conduzcamos nuestro auto robot!
Paso 1) coloque su auto robot en el suelo y encienda el interruptor.
Paso 2 ) seleccione en su teléfono móvil -> Configuración -> Configuración llamada de Bluetooth y busque un dispositivo Bluetooth HC-02 y conéctelo con el código 1234.
Paso 3 ) abra la Aplicación del robot de conducción de imitación OSOYOO, haga clic en el botón de búsqueda de BT y encuentra el Bluetooth que tiene emparejado.
Paso 4) encienda la palanca del motor, haga clic en Speed+ para hacer que el robot acelere ya que el auto robot es muy lento al principio. Cuando gira el ángulo de su teléfono móvil, su automóvil cambiará de dirección.
¡Disfruta de tu conducción!

















Hello! Me and my son have just hooked up our OSOYOO as the directions provide. We ran the lesson 1 code to check the motors are working properly. We can connect the iOS app to the HC-02, but cannot get the engine to start. We checked everything over and cannot find our error. Any ideas?
Please click speed+ several times to make the robot car move quickly.
please provide the screenshot when you operate the APP.
Hi Elaine,
I have a small problem with Lesson 7. I have completed all connections and downloaded the App to my android phone. The BT-search finds HC-02 and App connects. I can start engine, run the car forward and back with toggle control and pause the car with button F. However the steering wheel does not work. Have you any suggestions?
Regards, James Robb.
hi, James,
The way you rotate your cell phone may be wrong. You need to rotate the cell phone vertically not horizonlly. Please see our video.
If it doesn’t work yet, please tell me which version Android IOS of your phone.
Elaine
HI Elaine,
I have already tried all movements of the phone. I have a Blackview A50 mobile phone (no sim card) only used as controller. It has Android 11 o/s.
こんにちは。最近このロボットカーのアプリがアップデートされましたが、iPad版を同じロボットを使って試したところ、左右が逆になっているようです。つまり左に動くべき操作をしたときに”R”のメッセージが飛んで、右に動くべき時に”L”のメッセージが飛んでいます。これは修正する予定はありますか?
また、できれば同じアプリを使いたいので以前のアプリを使えるようにしてもらうことは可能でしょうか?よろしくお願いいたします。
Hello. The robot car app was recently updated, but when I tried the iPad version using the same robot, it seems that left and right are reversed. That is, when I perform an action that should move left, I get a “R” message, and when I should move right, I get a “L” message. Are there any plans to fix this?
Also, if possible, I would like to continue using the same app, so would it be possible to make the previous version available again? Thank you.
Dear user,
 . Download and Install it.
. Download and Install it.

I think you installed old version APP. Please remove the APP in your iPad, then go to Apple Store, search OSOYOO Imitation Driving Car APP, you find the following icon
To test this APP, please download following Arduino code:
https://osoyoo.com/driver/hc02.zip. Make sure your wifi shield jumper caps have connect D4 to B_TX and D5 to B_RX as following picture:
After you upload the hc02.ino file, open Serial monitor, use your APP to connect ->Scan HC-02 device, then you can test the APP. Firstly,turn on engine toggle. When you rotate your cell phone body or use your finger to rotate the steering wheel icon, when rotate to left side, the Serial monitor should show message like “L,1,10,1”, if rotate to right, the Serial monitor should show “R,-1,10,1”. L means the car should turn left, R means car should turn right.
If the hc02.ino does not show above result. Please take a video and show us what happens. Our email is [email protected]
Thanks
OSOYOO support team
返信ありがとうございます。いただいたサンプルコードを使ってみてみましたが、タブレットを右に傾けたときには”L”のメッセージが飛んでいるのを確認してます。これは以前のバージョンでは”R”が飛んでいた動作です。また直感的にもハンドルを右に傾けたら右に動くほうがわかりやすい操作だと思います。
以前のバージョンのiPadアプリと逆にしたのはなぜですか?当然ですが、アプリはAppleストアからダウンロードした最新のものを使っていますよ。
Thank you for your reply. I tried using the sample code you provided, and I confirmed that the “L” message is displayed when I tilt the tablet to the right. In the previous version, the “R” message was displayed. Also, I think it’s more intuitive to have the device move to the right when the handle is tilted to the right.
Why did you reverse the behavior compared to the previous version of the iPad app? Of course, I’m using the latest version of the app downloaded from the Apple Store.
I don’t have new iPad, so I just tried my iphone using the latest OSOYOO imitation driving APP, it shows L when I tilt to left and R when I tilt to right. Also I tried another way to send signal. I use my finger to rotate the steering icon in the screen, when I rotate steering wheel to left, it shows L. If I rotate wheel to right, it shows R. So I suggest you delete the current APP in your iPad and download new APP again. Also try to use your finger to rotate the wheel and see what will happen.
コメントありがとうございます。私は日本の長岡市というところでプログラミングを子供たちに教えているものです。このロボットカーを教材として使用してまして、すべてのロボットカー、iPadで再現している不具合です。
iPadのバージョンと世代をお伝えしておきます。
世代:第五世代
iOS:16.7.16
傾きによる操作は逆になりますが、ハンドルを手動で動かすときは正常な動きです。このことからiPadの傾きセンサーの問題が疑われますが、いかがでしょうか?
—-
Thank you for your comment. I teach programming to children in Nagaoka City, Japan. I use this robot car as teaching material, and this bug is reproducible on all robot cars and iPads.
Here is the iPad version and generation:
Generation: 5th Generation
iOS: 16.7.16
The tilt-based controls are reversed, but the steering wheel works normally when moved manually. This suggests a problem with the iPad’s tilt sensor. What do you think?
this is quite strange. we tested the APP in iPhone 13,14,15,15 pro. All works well. But we never test iPad. Maybe iPad sensor is different from that of iPhone. We need to make further investigation. Anyway, there is a simple solution to make your iPad work.If you found the APP in your iPad or any other devices act reversely. Please download following Arduino program:
https://osoyoo.com/driver/v2smartcar-lesson7reverse.zip
Above program should work in your iPad.
Let us know if you have any other questions about this project.