注意: すべてのOSOYOO Arduino製品はサードパーティ製ボードであり、Arduinoと完全互換です
VIDEO 認定オンライン小売業者 Shopify Amazon
目的
OSOYOO 2WDロボットカースターターキットの最初のレッスンへようこそ!
この「Hello World」バージョンのレッスンでは、ロボットカーの最も重要なフレームワークをインストールし、車を簡単な動作をさせるプログラムを行います。このレッスンのテスト動作に合格すれば、Arduino、モーターコントロールモジュール、モーター、バッテリー、シャーシ、およびこれらの部品間の配線接続がすべて正常に機能していることを意味します。
今後のレッスンでの実験はすべてレッスン1のフレームワークに基づいているため、このレッスンのインストールとサンプルコードを適切にテストすることは非常に重要です。
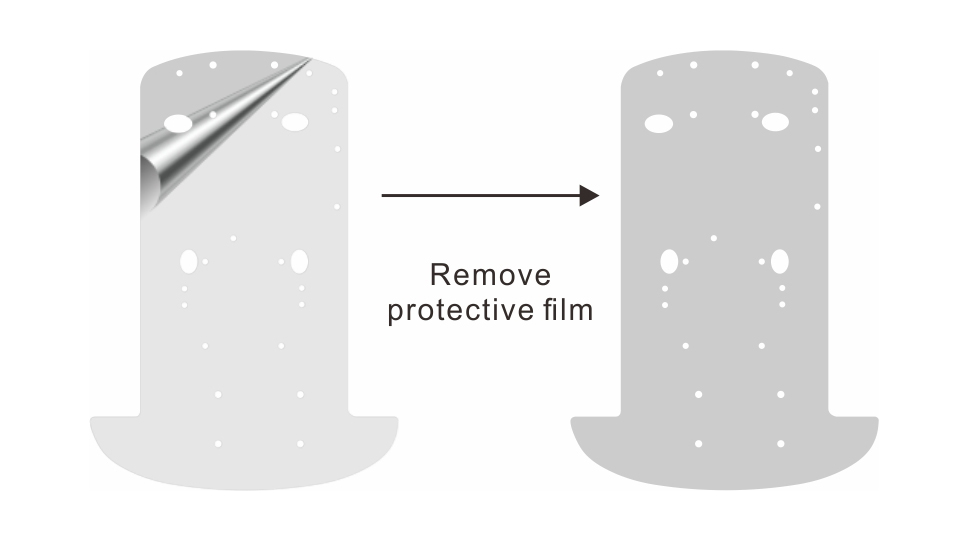
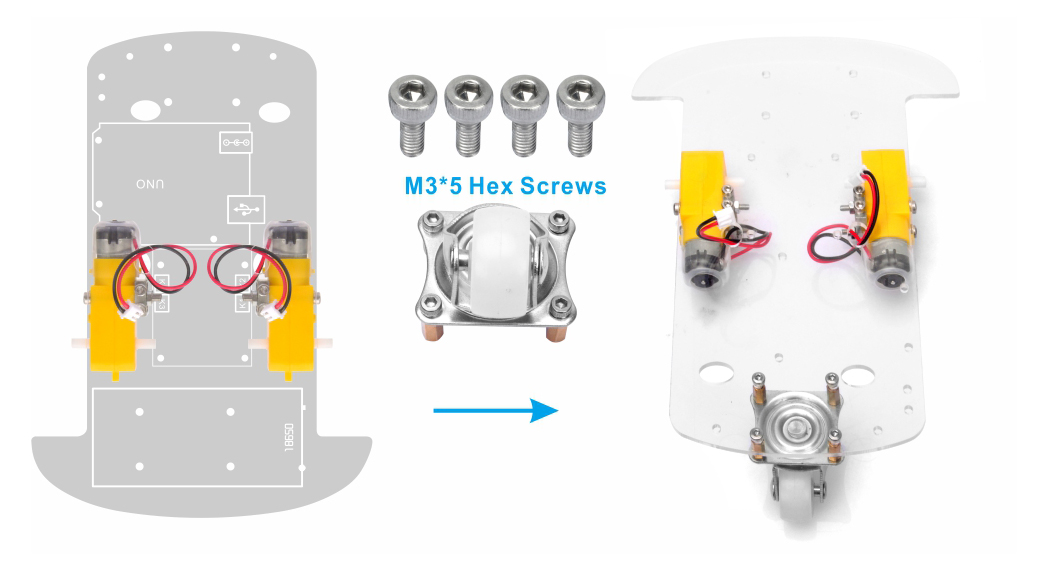
ハードウェアの取り付け シャーシの背面から保護フィルムを取り外してください。
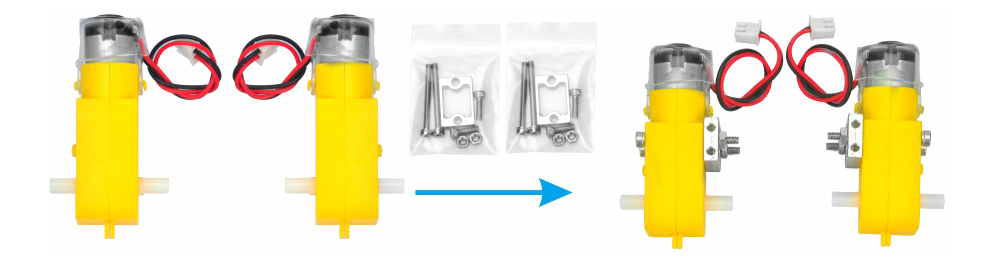
1) モーター
アクセサリー:
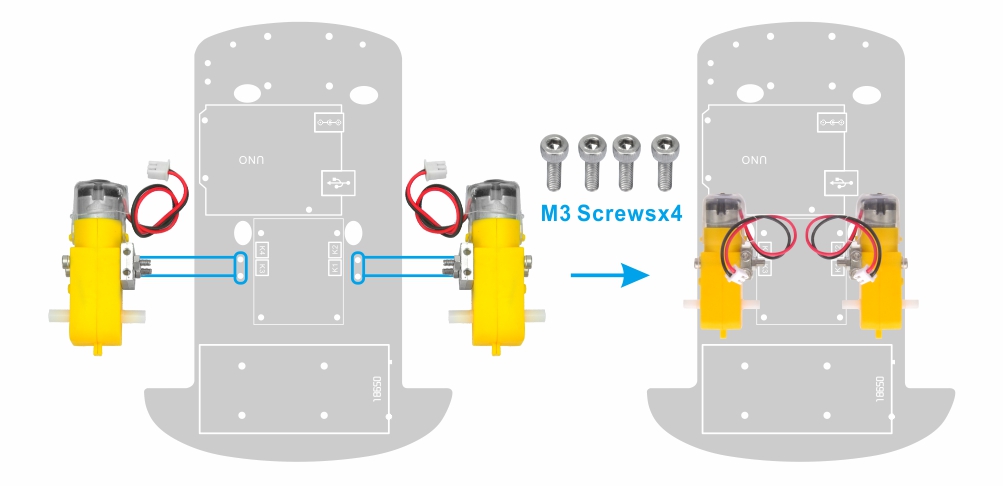
モーターホルダーを使用してシャーシに2つのモーターを取り付けます
注意
モーターのワイヤー側に取り付けてください
ネジ穴のある端を上に向けてください
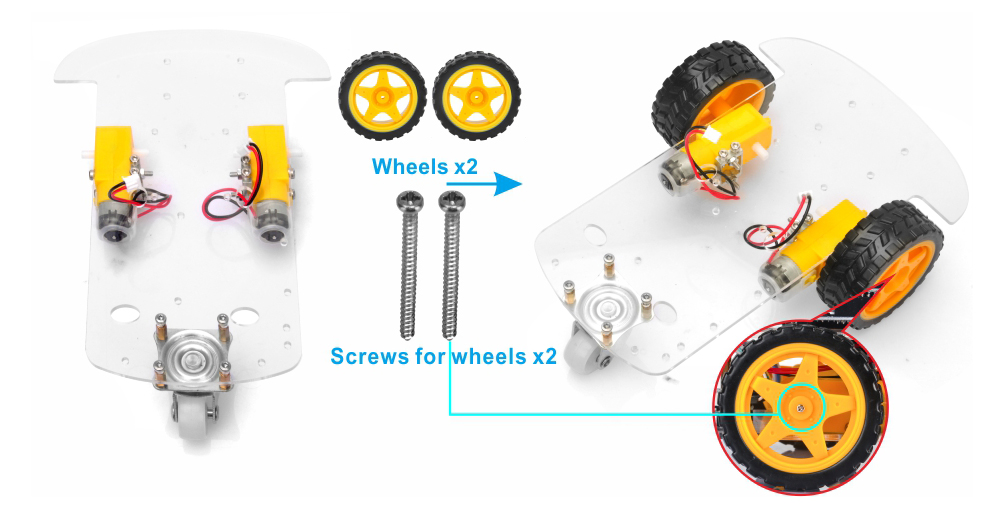
2) 万能ホイールとホイール
アクセサリー:
M3*10 両面通し銅スペーサー x 4
M3*5 六角ネジ x 8
ホイール用ネジ x 2
M3*10 両面通し銅スペーサーとM3*5 六角ネジを使用してシャーシにホイールを取り付け、次に2つのホイールをモーターに取り付けます。
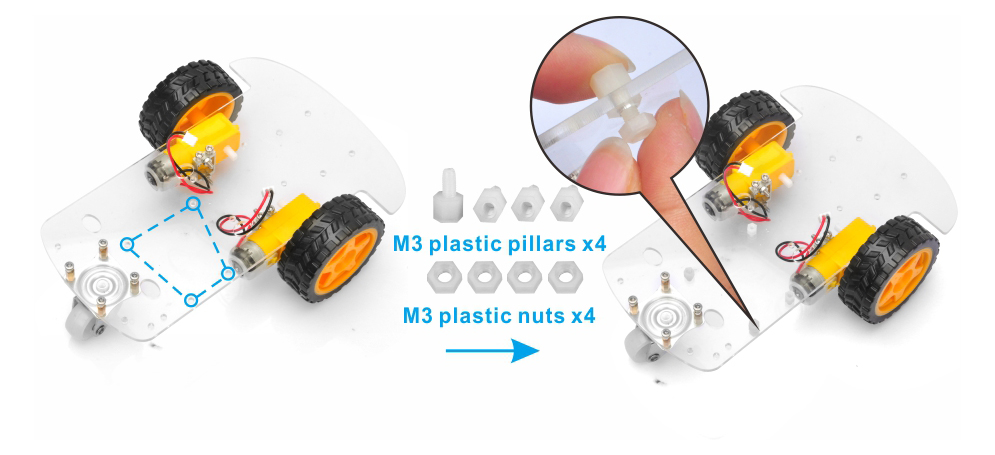
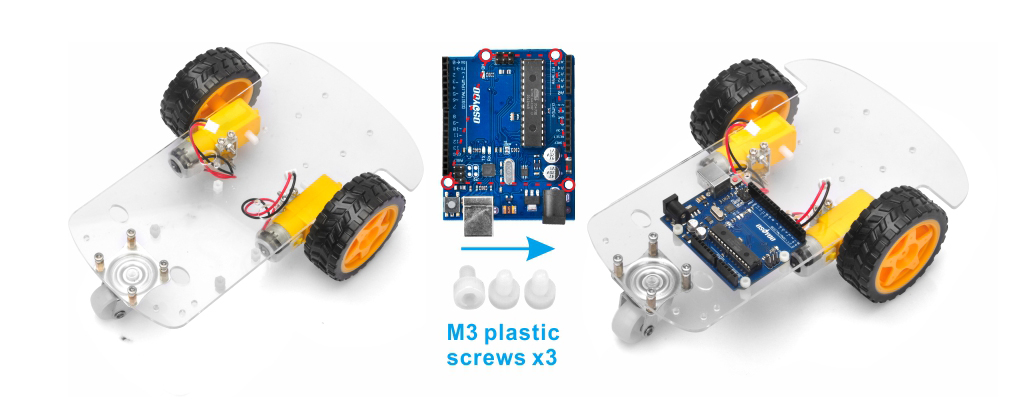
3) OSOYOO UNOボードの取り付け
アクセサリー:
M3*6 プラスチックネジ x 3
M3 プラスチックナット x 4
M3*5+6 プラスチックスペーサー x 4
M3ネジとナットを使用してシャーシの表面にOSOYOO UNOボードを取り付けます
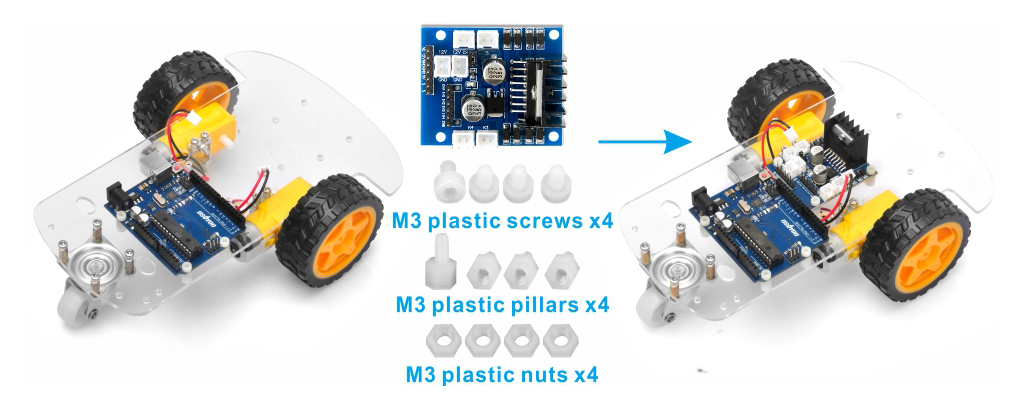
4) OSOYOO Model-X モータードライバーモジュール
アクセサリー:
M3*6 プラスチックネジ x 4
M3 プラスチックナット x 4
M3*5+6 プラスチックスペーサー x 4
M3ネジとナットを使用してシャーシの表面にOSOYOO Model-X モータードライバーモジュールを取り付けます
5) バッテリーボックス
アクセサリー:
M3ネジとナットを使用してシャーシの表面にバッテリーボックスを取り付けます。
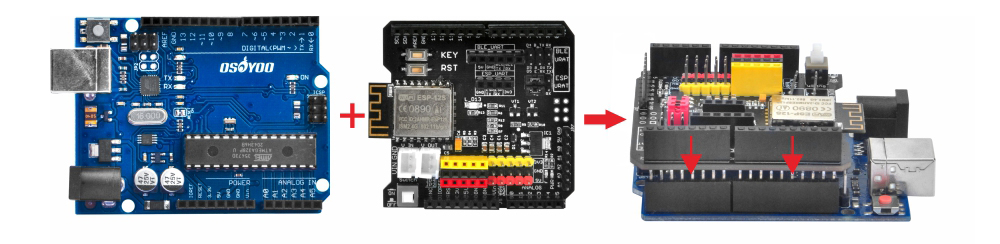
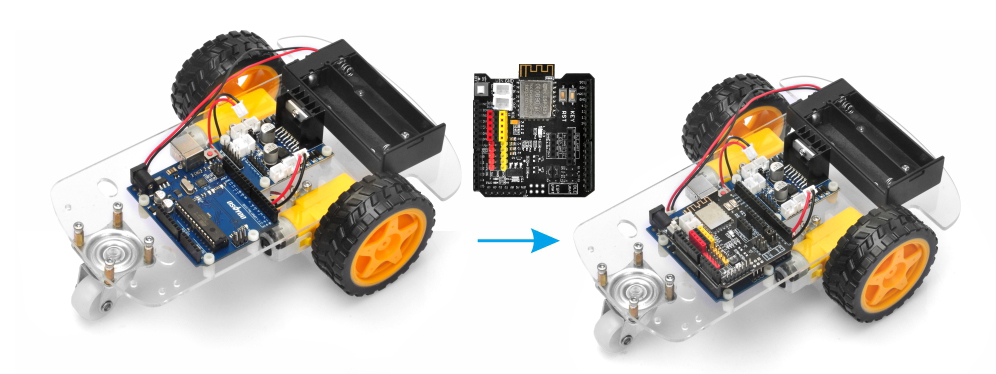
6) WifiシールドをUNOボードに挿入
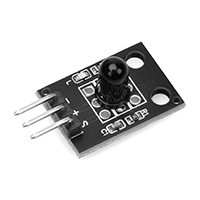
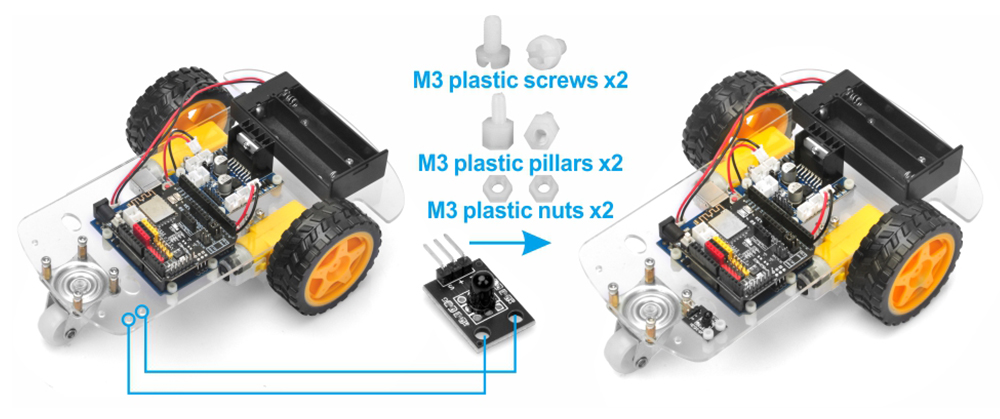
7) 赤外線受信機
アクセサリー:
M3*6 プラスチックネジ x 2
M3 プラスチックナット x 2
M3*5+6 プラスチックスペーサー x 2
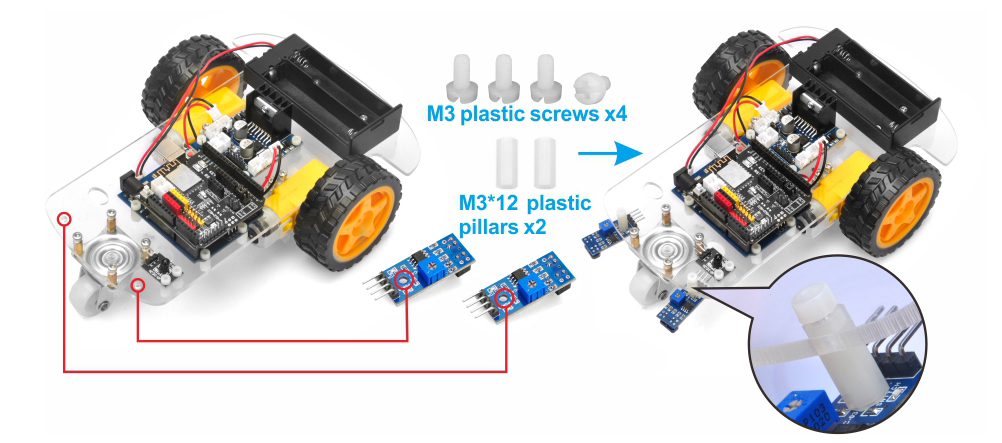
8) トレーキングセンサーモジュール
アクセサリー:
M3*6 プラスチックネジ x 4
M3*12 プラスチックスペーサー x 2
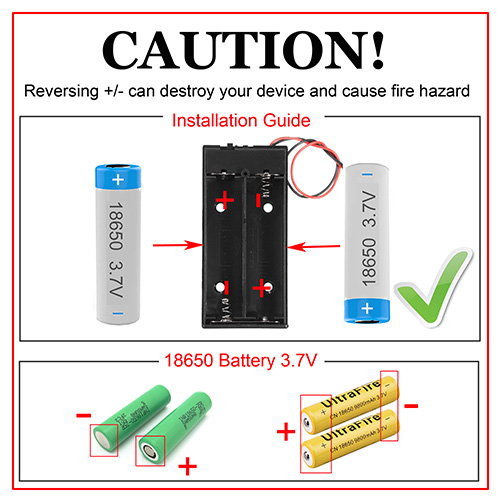
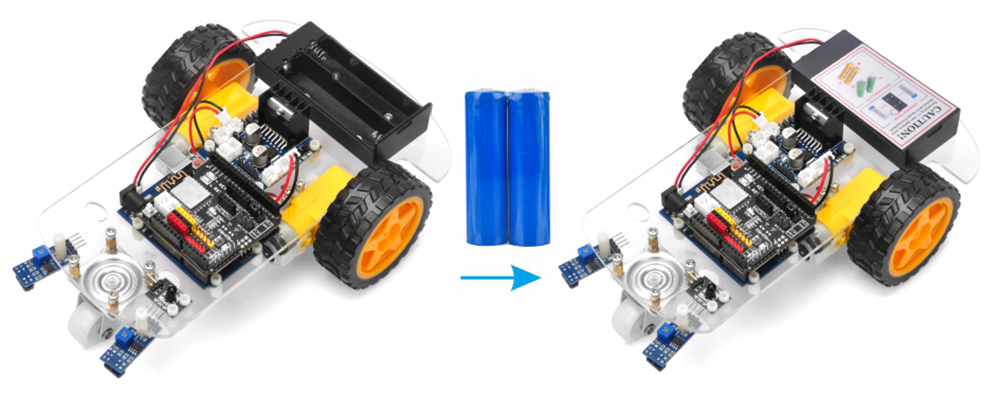
9) バッテリー
注意: 取扱説明書を確認し、極性の方向が正しいことを確認してください。そうでない場合、デバイスが破損し、火災の危険を引き起こす可能性があります。 バッテリーボックスのスイッチをOFFにしてください。
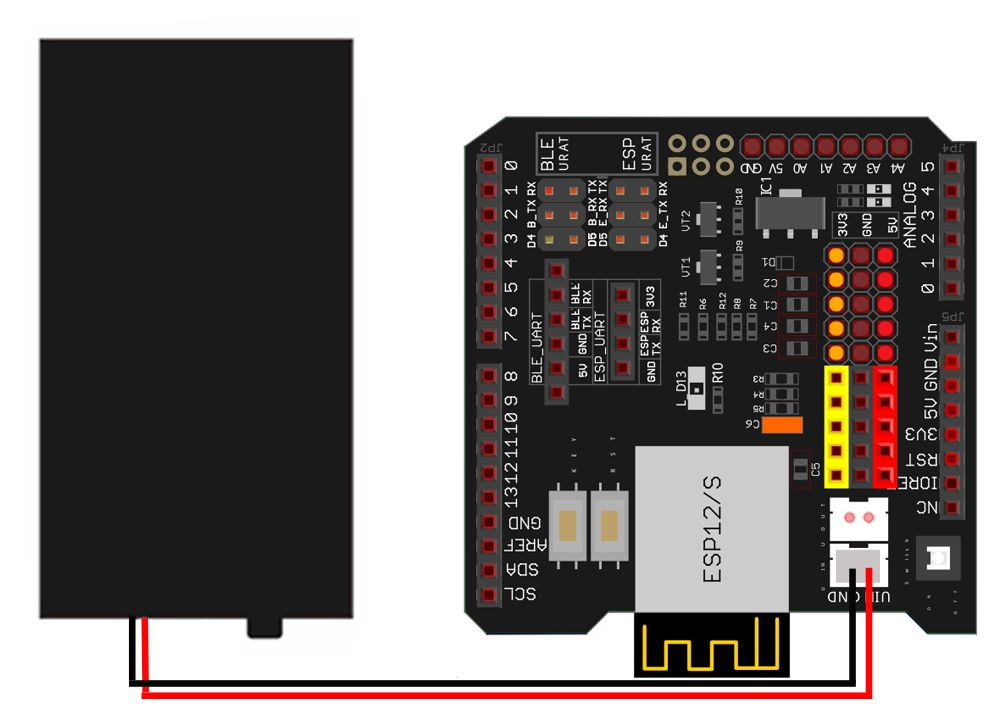
バッテリーボックスをWi-Fiシールドに接続
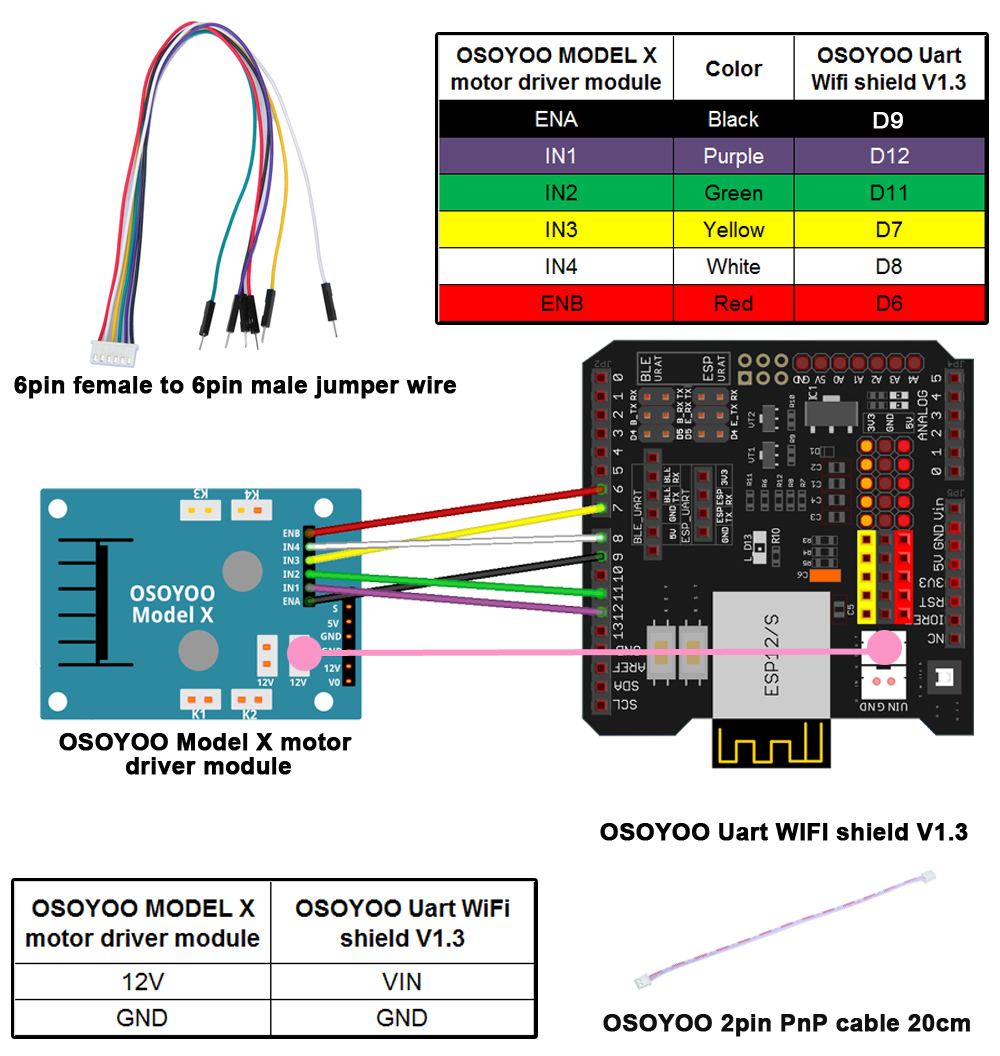
2. 以下のようにOSOYOO Model-Xと Arduino UNO用WiFiシールド を接続:
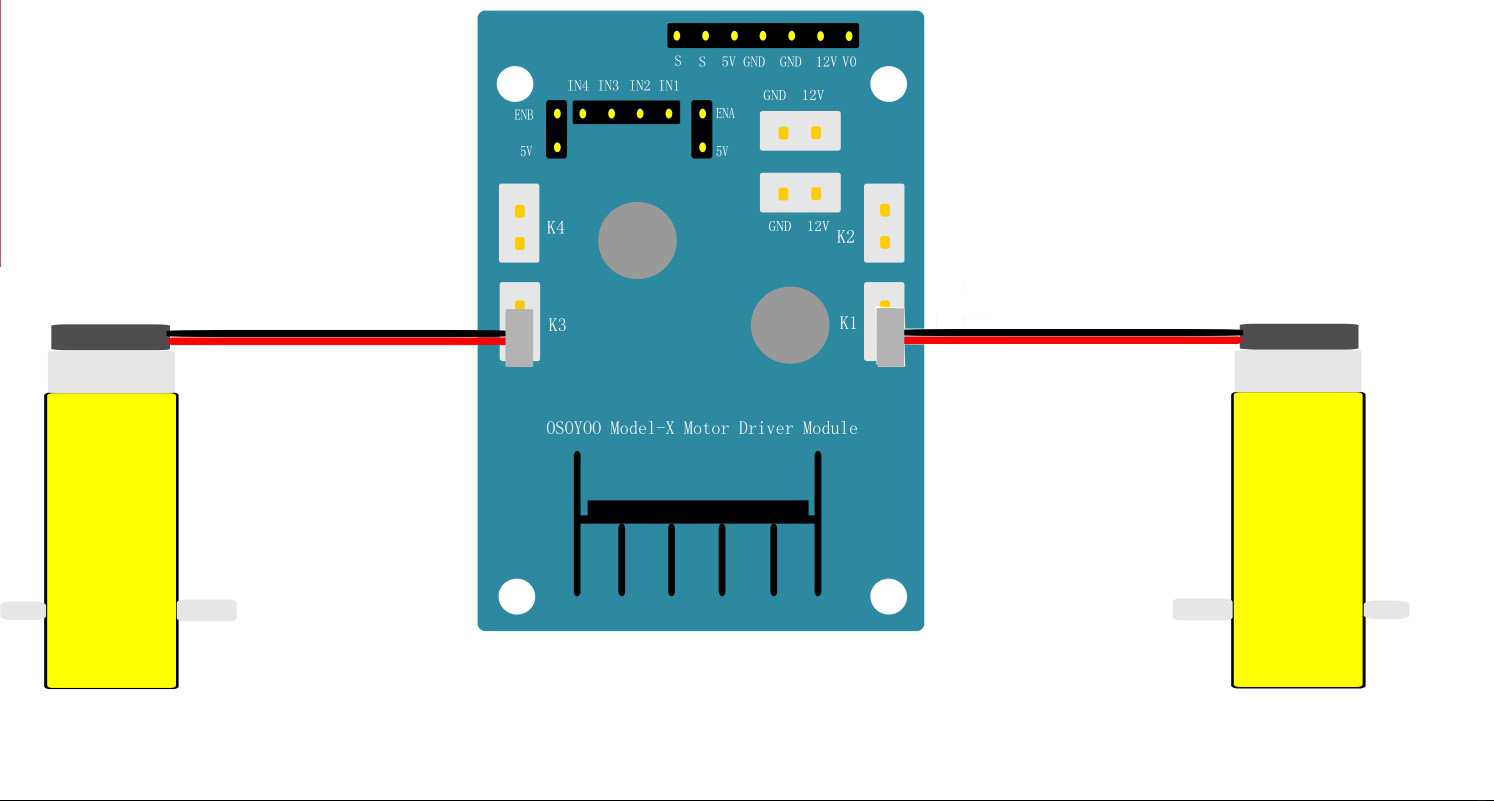
3. OSOYOO Model-X モータードライバーモジュールと2つのモーターを接続
右側のモーターをK1またはK2に、左側のモーターをK3またはK4に以下のように接続:
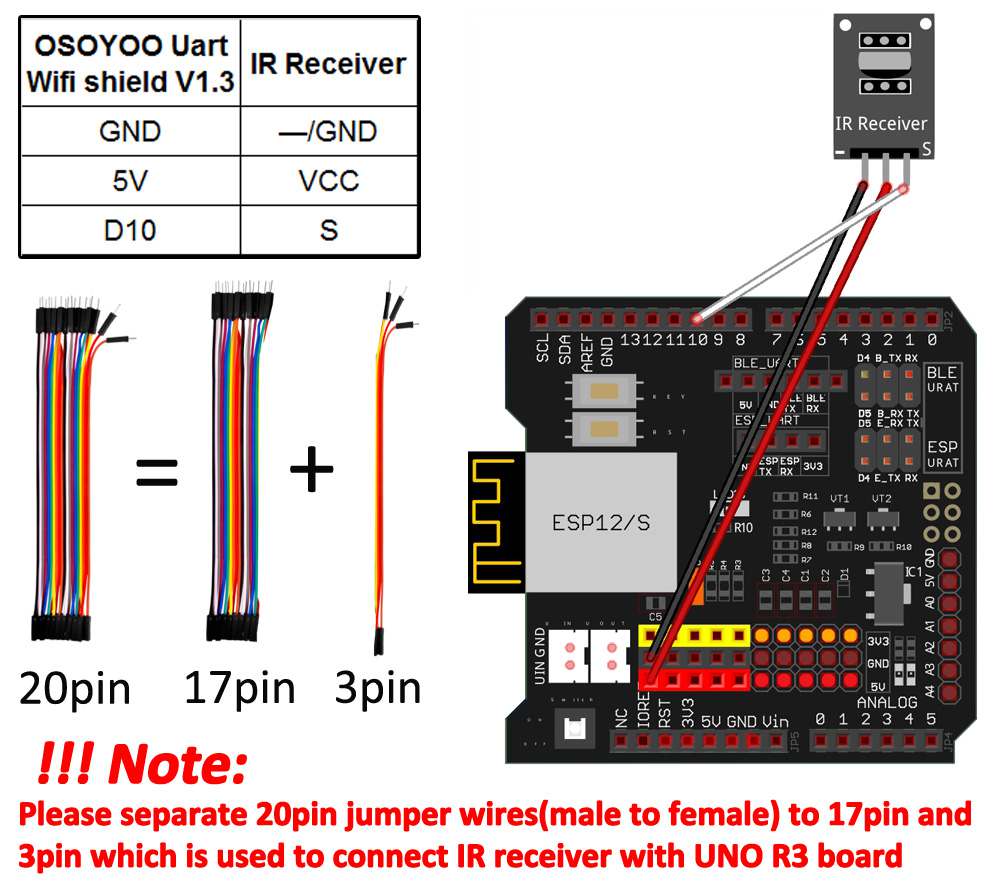
4. OSOYOO UART Wi-Fiシールドと赤外線受信機を接続:
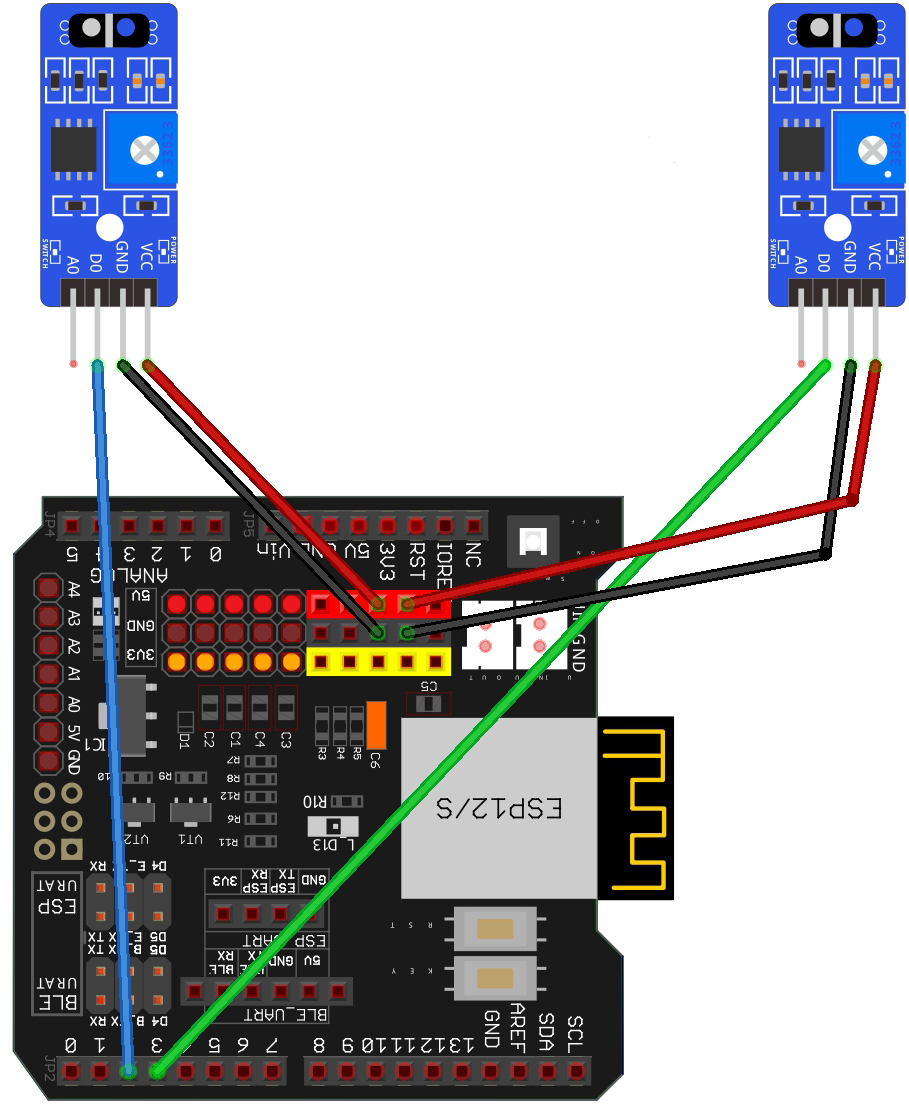
5. OSOYOO UART Wi-Fiシールドとトレーキングセンサーを接続:
左側のトレーキングセンサー
トレーキングセンサー
Arduino UNO用センサーシールドV5.0
VCC
5V
GND
GND
DO
S2
AO
未接続
右側のトレーキングセンサー
トレーキングセンサー
Arduino UNO用センサーシールドV5.0
VCC
5V
GND
GND
DO
S3
AO
未接続
ソフトウェアのインストール 注意: スケッチコードをArduinoにアップロードする際は、バッテリーの電源を切るか、電源アダプターを抜いてください。 ステップ 1:
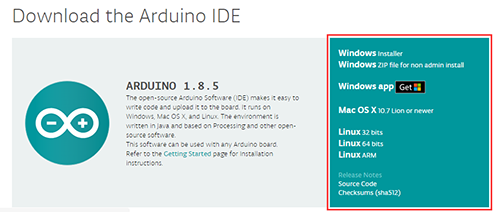
最新のArduino IDEをインストール(Arduino IDEバージョン1.18.19をお持ちの場合は、このステップをスキップしてください)。
https://www.arduino.cc/en/Main/Software?setlang=en からArduino IDEをダウンロードし、ソフトウェアをインストールしてください。
ステップ 2:
https://osoyoo.com/driver/2wd/lesson1.zip をダウンロードし、解凍してください。lesson1という名前のフォルダが表示されます
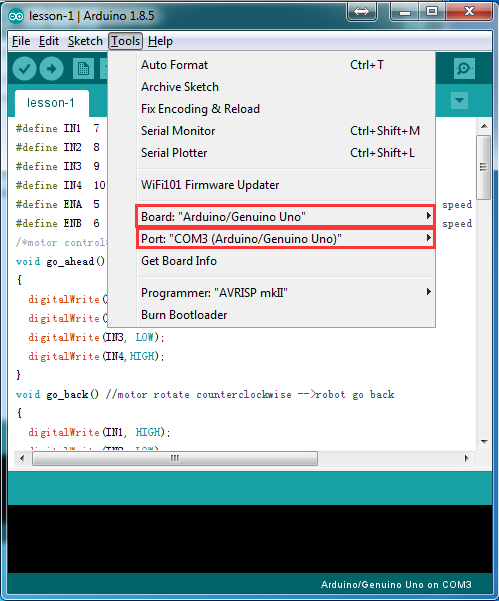
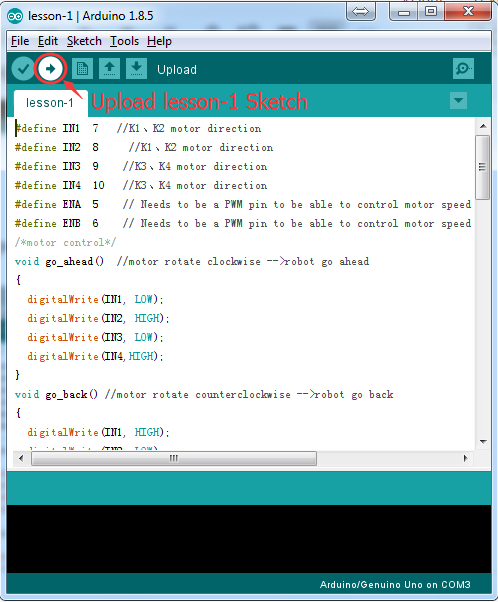
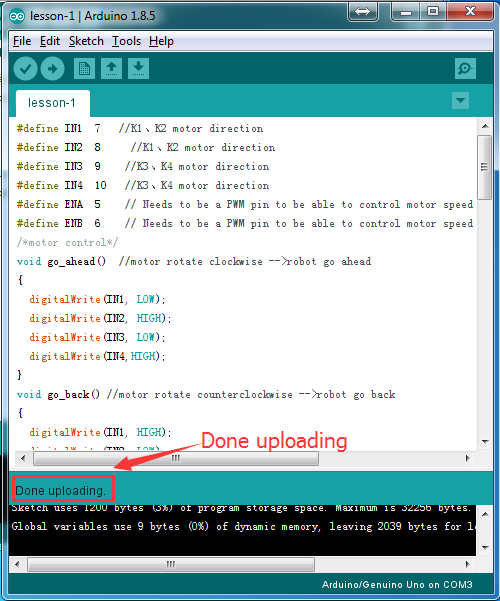
ステップ 3:
USBケーブルを使用してUNO R3ボードをPCに接続し、Arduino IDEを開き、プロジェクトに対応するボード/ポートを選択してください
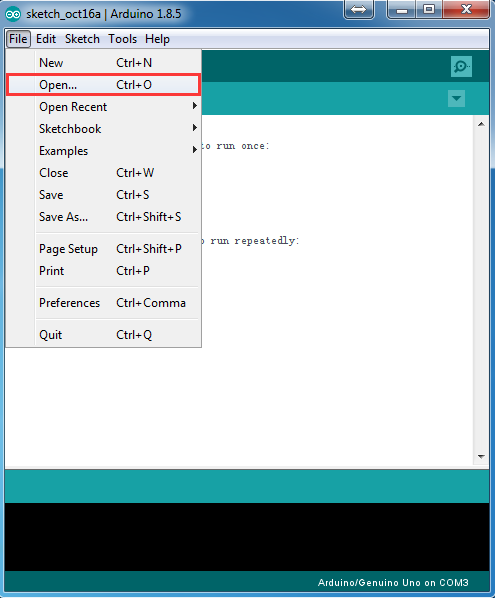
ステップ 4:
ファイル -> 開く をクリック -> 「lesson1.ino
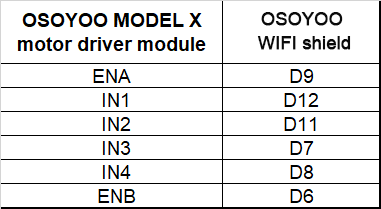
以下はOSOYOO Model-XとArduino間のインターフェース定義です
注意: ENAとENBはPWMポートに接続する必要があります。IN1/IN2は右モーターの回転方向を制御し、
#define speedPinR 9 // RIGHT PWM pin connect MODEL-X ENA
#define RightMotorDirPin1 12 //Right Motor direction pin 1 to MODEL-X IN1
#define RightMotorDirPin2 11 //Right Motor direction pin 2 to MODEL-X IN2
#define speedPinL 6 // Left PWM pin connect MODEL-X ENB
#define LeftMotorDirPin1 7 //Left Motor direction pin 1 to MODEL-X IN3
#define LeftMotorDirPin2 8 //Left Motor direction pin 1 to MODEL-X IN4
#define SPEED 140
#define RIGHT_SPEED 140
以下の関数で車を前進、後退、停止、右折、左折させることができます:
void go_Advance(void) //Forward
{
digitalWrite(RightMotorDirPin1, HIGH);
digitalWrite(RightMotorDirPin2,LOW);
digitalWrite(LeftMotorDirPin1,HIGH);
digitalWrite(LeftMotorDirPin2,LOW);
analogWrite(speedPinL,SPEED);
analogWrite(speedPinR,SPEED);
}
void go_Left(int t=0) //Turn left
{
digitalWrite(RightMotorDirPin1, HIGH);
digitalWrite(RightMotorDirPin2,LOW);
digitalWrite(LeftMotorDirPin1,LOW);
digitalWrite(LeftMotorDirPin2,HIGH);
analogWrite(speedPinL,SPEED);
analogWrite(speedPinR,SPEED);
delay(t);
}
void go_Right(int t=0) //Turn right
{
digitalWrite(RightMotorDirPin1, LOW);
digitalWrite(RightMotorDirPin2,HIGH);
digitalWrite(LeftMotorDirPin1,HIGH);
digitalWrite(LeftMotorDirPin2,LOW);
analogWrite(speedPinL,SPEED);
analogWrite(speedPinR,SPEED);
delay(t);
}
void go_Back(int t=0) //Reverse
{
digitalWrite(RightMotorDirPin1, LOW);
digitalWrite(RightMotorDirPin2,HIGH);
digitalWrite(LeftMotorDirPin1,LOW);
digitalWrite(LeftMotorDirPin2,HIGH);
analogWrite(speedPinL,SPEED);
analogWrite(speedPinR,SPEED);
delay(t);
}
void stop_Stop() //Stop
{
digitalWrite(RightMotorDirPin1, LOW);
digitalWrite(RightMotorDirPin2,LOW);
digitalWrite(LeftMotorDirPin1,LOW);
digitalWrite(LeftMotorDirPin2,LOW);
}
以下の関数でモーターの速度を変更できます。変数speed_Lで左モーターの速度を変更でき、変数speed_Rで右モーターの速度を制御できます。
この関数パラメータの有効範囲は0-255です
void set_Motorspeed(int speed_L,int speed_R)
{
analogWrite(speedPinL,speed_L);
analogWrite(speedPinR,speed_R);
}
ArduinoをPCから切断し、完全充電された18650バッテリー2本をバッテリーボックスに挿入してください( 取扱説明書を確認し、極性の方向が正しいことを確認してください。そうでない場合、デバイスが破損し、火災の危険を引き起こす可能性があります) .
車を地面に置き、バッテリーボックスの電源スイッチを入れ、Wi-Fiシールドの電源スイッチを開きます。
車は2秒間前進し、次に2秒間後退し、次に2秒間左折し、次に2秒間右折し、最後に停止します。
VIDEO 車が上記の結果に従って動かない場合は、配線接続とバッテリー電圧(7.2V以上必要)を確認してください。
トラブルシューティング
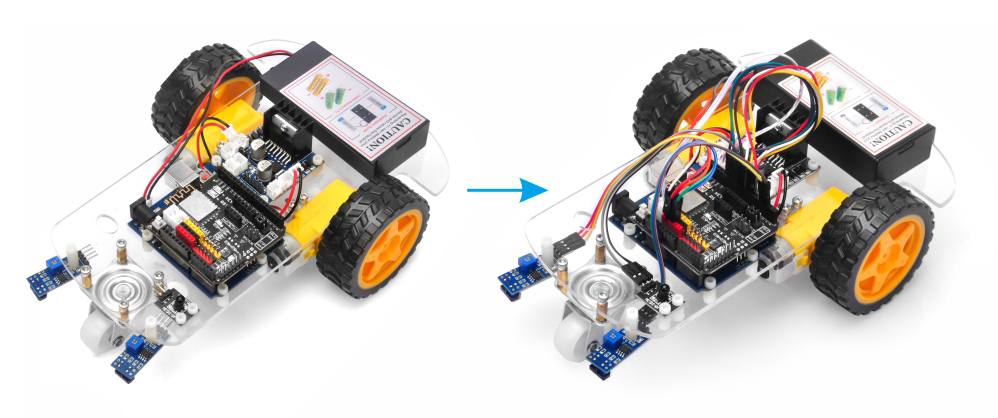
レッスン1のコードを実行した後、片側の車輪が回転しない、または片側の車輪が前進はできるが後退できない(あるいはその逆)といった問題が発生した場合、原因はModel Xボードに接続されている6ピンケーブルの断線または接触不良である可能性が高いです。
以下がその解決策です:
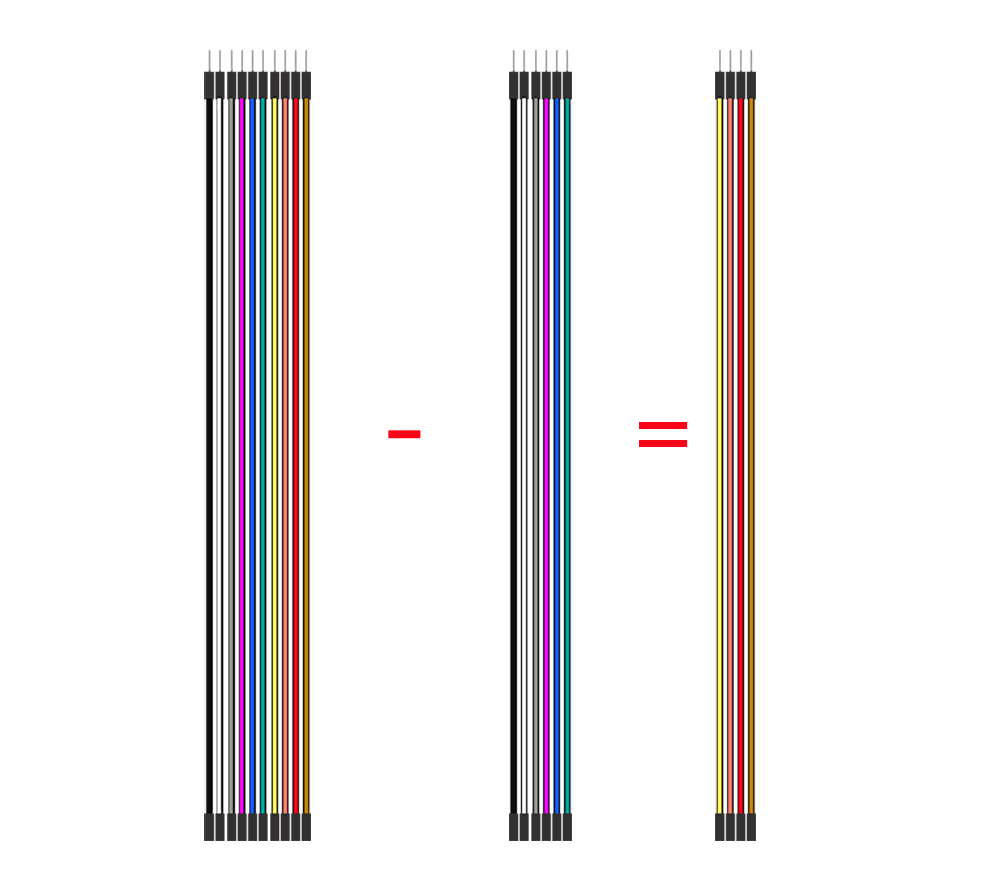
VIDEO ステップ1: Model XボードとArduinoボードを接続している6ピンケーブルを取り外します。
ステップ2: キットの中から、予備のメス-オスジャンパーワイヤーを6本見つけます(色は問いません)。
ステップ3: これら6本のジャンパーワイヤーを使い、以前のModel Xの配線図に従って、Model Xボードのピン(ENA, IN1, IN2, IN3, IN4, ENB)をArduinoボードの対応するピンに手動で再接続します。
ステップ4: 再度レッスン1のコードをテストし、問題が解決したか確認します。もし問題が解決しない場合は、問題の詳細を [email protected] までお送りください。弊社の技術サポートチームがお手伝いいたします。














 :
: