注意: すべてのOSOYOO Arduino製品はサードパーティ製ボードであり、Arduinoと完全互換です
目次
認定オンライン小売業者
Shopify

Amazon

目的

OSOYOO 2WDロボットカースターターキットの第3レッスンへようこそ!
レッスン1に従ってロボットカーの基本フレームワークを取り付けてください。レッスン1の取り付けをすでに完了している場合は、そのままにしておき、取り付けたモジュールをすべて取り外す必要はありません。
このレッスンのソフトウェアは、これら2つの白黒トレーキングセンサーからデータを読み取り、2WDロボットカーを自動的に白い地面の黒いトラックラインに沿って移動させます。

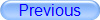
ハードウェアの取り付け
1) 2WDロボットカーシャーシの取り付け
2WDロボットカースターターキット レッスン1に従ってスマートカーの基本フレームワークを取り付けてください。レッスン1の取り付けをすでに完了している場合は、そのままにしておき、取り付けたモジュールをすべて取り外す必要はありません。
このモジュールの詳細情報については以下を参照してください:
https://osoyoo.com/ja/?p=10206
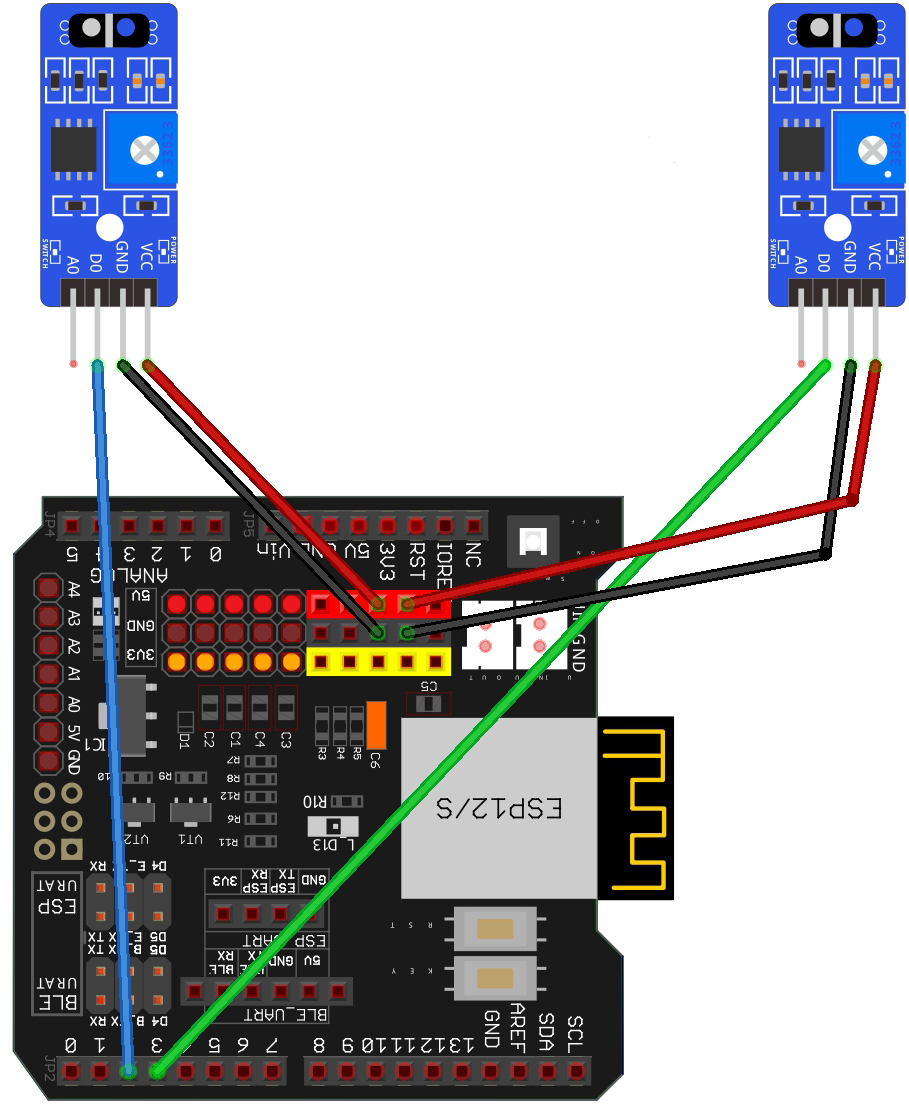
OSOYOO UART Wi-Fiシールドとトレーキングセンサーの接続:
| 左側のトレーキングセンサー |
| トレーキングセンサー |
Arduino UNO用センサーシールドV5.0 |
| VCC |
5V |
| GND |
GND |
| DO |
S2 |
| AO |
未接続 |
| 右側のトレーキングセンサー |
| トレーキングセンサー |
Arduino UNO用センサーシールドV5.0 |
| VCC |
5V |
| GND |
GND |
| DO |
S3 |
| AO |
未接続 |
ソフトウェアのインストール
注意: スケッチコードをArduinoにアップロードする際は、バッテリーの電源を切るか、電源アダプターを抜いてください。
ステップ 1: 最新のArduino IDEをインストールしてください(Arduino IDEバージョン1.1.16以降をお持ちの場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=enからArduino IDEをダウンロードし、ソフトウェアをインストールしてください。
ステップ 2: https://osoyoo.com/driver/2wd/lesson-3.zipをダウンロードして解凍してください。lesson-3という名前のフォルダが表示されます。
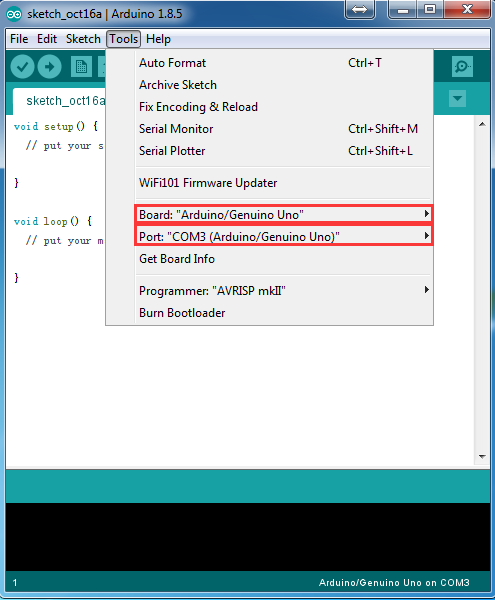
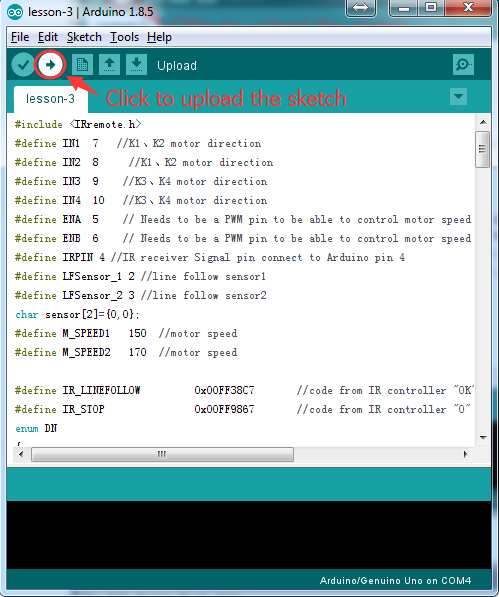
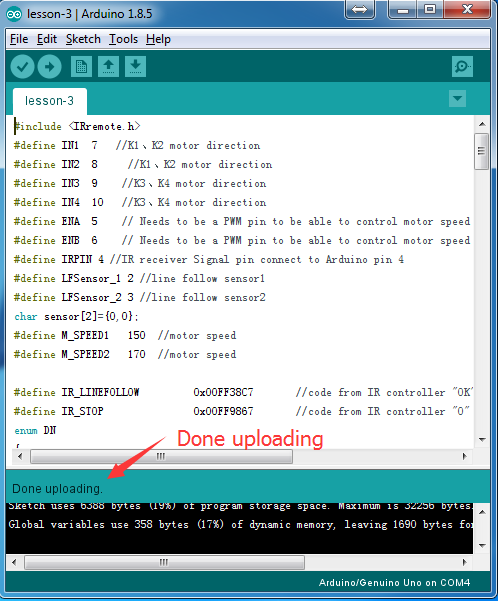
ステップ 3: USBケーブルでUNO R3ボードをPCに接続し、Arduino IDEを開き、プロジェクトに対応するボード/ポートを選択して、スケッチをボードにアップロードしてください。
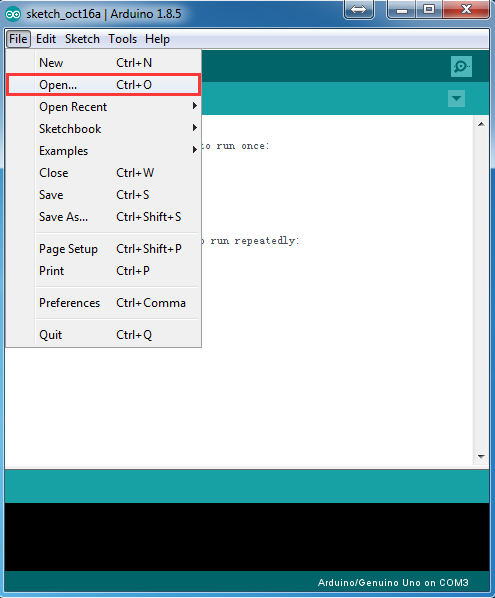
ステップ 4: Arduino IDE: ファイル → 開く → lesson-3フォルダ内の「lesson-3.ino」コードを選択し、コードをArduinoにロードしてください。
コードの説明
ライン19/20 トレーキングセンサー間の定義、D3は右センサーに接続、D2は左センサーに接続:
#define RightSensor 3
#define LeftSensor 2
以下の2つの変数は、車の左右回転の持続時間(ミリ秒)を表します。時間が長ければ、回転角度が鋭くなります:
#define RIGHT_TIME 15
#define LEFT_TIME 15
read_sensor()関数は、左/右センサーが黒または白の領域にあることを検出します。トレーキングセンサーは、黒い領域(トラックライン)上にある場合は1を返し、白い地面にある場合は0を返します。したがって、read_sensor()関数は0/1の値を2つの変数left_statusとright_statusに設定します。例えば、left_statusの値が0でright_statusの値が1の場合、車の右側が黒いラインに触れたことを意味します。この場合、車に右折を強制します。
このプロジェクトの核となる関数はauto_tracking()関数です。この関数の原理は以下の通りです:
1)左センサーが黒を検出し、右センサーが白を検出した場合、車の左側が黒いラインに触れたことを意味し、左折します。
2)右センサーが黒を検出し、左センサーが白を検出した場合、車の右側が黒いラインに触れたことを意味し、右折します。
3)両方のセンサーが白い領域にある場合、黒いラインが2つのセンサーの間にあることを意味し、前進します。
4)両方のセンサーが黒い領域にある場合、車が黒い停止ラインに触れたことを意味し、車は停止します。
テスト
OSOYOO UNO R3ボードをPCから切断し、完全充電された18650バッテリー2本をバッテリーボックスに挿入してください(取扱説明書を確認し、極性の方向が正しいことを確認してください)。バッテリーボックスの電源スイッチを開いてください。
ステップ 1: 白い地面に黒いトラックを準備してください。(黒いトラックの幅は20mm以上30mm未満)
注意してください、トラックの曲がり角は90度を超えてはなりません。 角度が大きすぎると、車がトラックから外れてしまいます。
ステップ 2: トレーキングセンサーモジュールの感度を調整してください。
車の電源を入れ、車を持ち上げて、フィリップススクリュードライバーでトレーキングセンサーの可変抵抗器を調整し、最適な感度状態を取得してください:センサーが白い地面の上にあるときは信号表示LEDが点灯し、センサーが黒いトラックの上にあるときは信号LEDが消灯します。
信号表示LED ON: 白い地面
信号表示LED OFF: 黒いトラック
ステップ 3: 車の電源を入れ、車を黒いトラックの上に置くと、車は黒いトラックに沿って移動します。
車が動かない場合は、以下を確認してください:
- バッテリーが動作するかどうか;
- 接続が正しいかどうか;
- トレーキングセンサーの感度を適切に調整したかどうか
部品とデバイス:




































adf