First, you are running lesson6A or Lesson6B sketch?
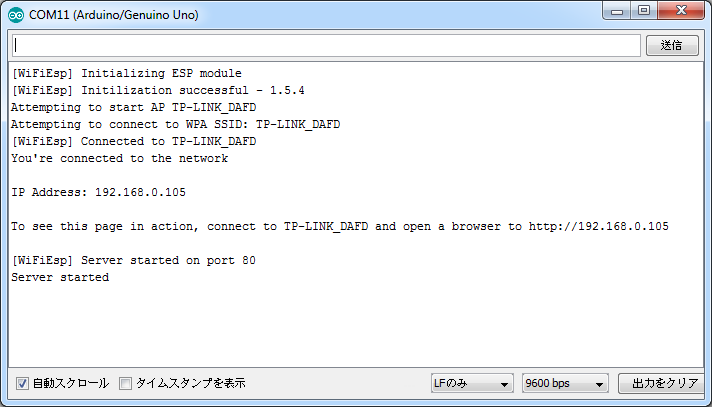
If you are running lesson6 A, did you set your Wifi Route name and password in the Lesson6A sketch? what is the IP address showed serial monitor ?
I am not sure how do you know you are not connected. Is there any error message in your cell phone?
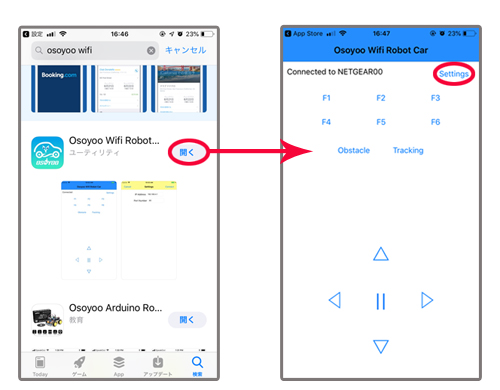
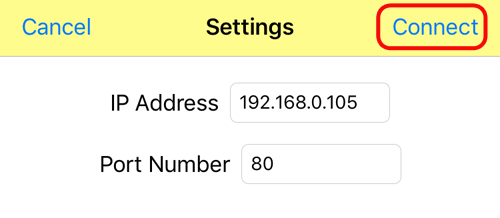
Normally when your cell phone is connected your local Wifi network, your APP will show message like Connected to SSID: “xxxxx” , xxxxx is your wifi name, see the RED circle in following picture: http://osoyoo.com/driver/picar/lesson6wifi.jpg
Did you see your wifi SSID similar to above picture? If not, what did you see?
STA mode is working on Android 8.0 but not on newer Android version.
Any special setting on the phones for newer Android versions? Any updated sketch to support newer Android versions?
APP always shows wifi disconnected even if the phone shows it’s connected to the wifi. The serial monitor already shows the car is connected to the wifi.
AP mode not working on Android 6, 8 & 10. APP shows wifi connected osoyoo wifi but no response on the car after pressing any of the buttons.
Hello,
I can’t connect to the Cr with the APP on Android 10, the car doesn’t drive, doesn’t respond.
I connected all the cables correctly.
The WIFI Shielt sends out WiFi, my cell phone connects to the car but it doesn’t move when I press the buttons.
Hello,
I can’t connect to the Car with the APP on Android 10, the car doesn’t drive, doesn’t respond.
I connected all the cables correctly.
The WIFI Shielt sends out WiFi, my cell phone connects to the car but it doesn’t move when I press the buttons.
Hola , tengo un problema con el código . Me lo podrían solucionar ?
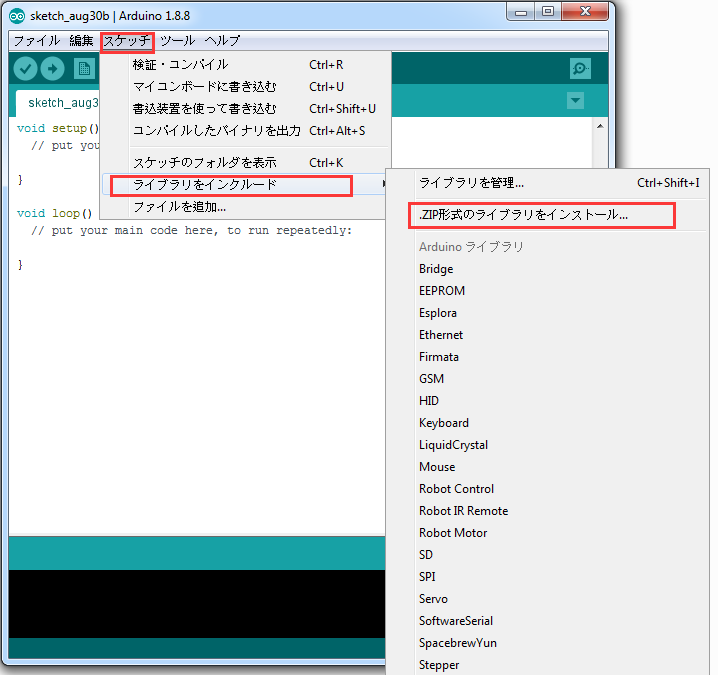
me pone error en la parte de #include “WiFiEsp.h”
y en la parte donde te notifica los errores pone :
v2smartcar-lesson6A:92:10: fatal error: WiFiEsp.h: No such file or directory
#include “WiFiEsp.h”
^~~~~~~~~~~
compilation terminated.
exit status 1
WiFiEsp.h: No such file or directory











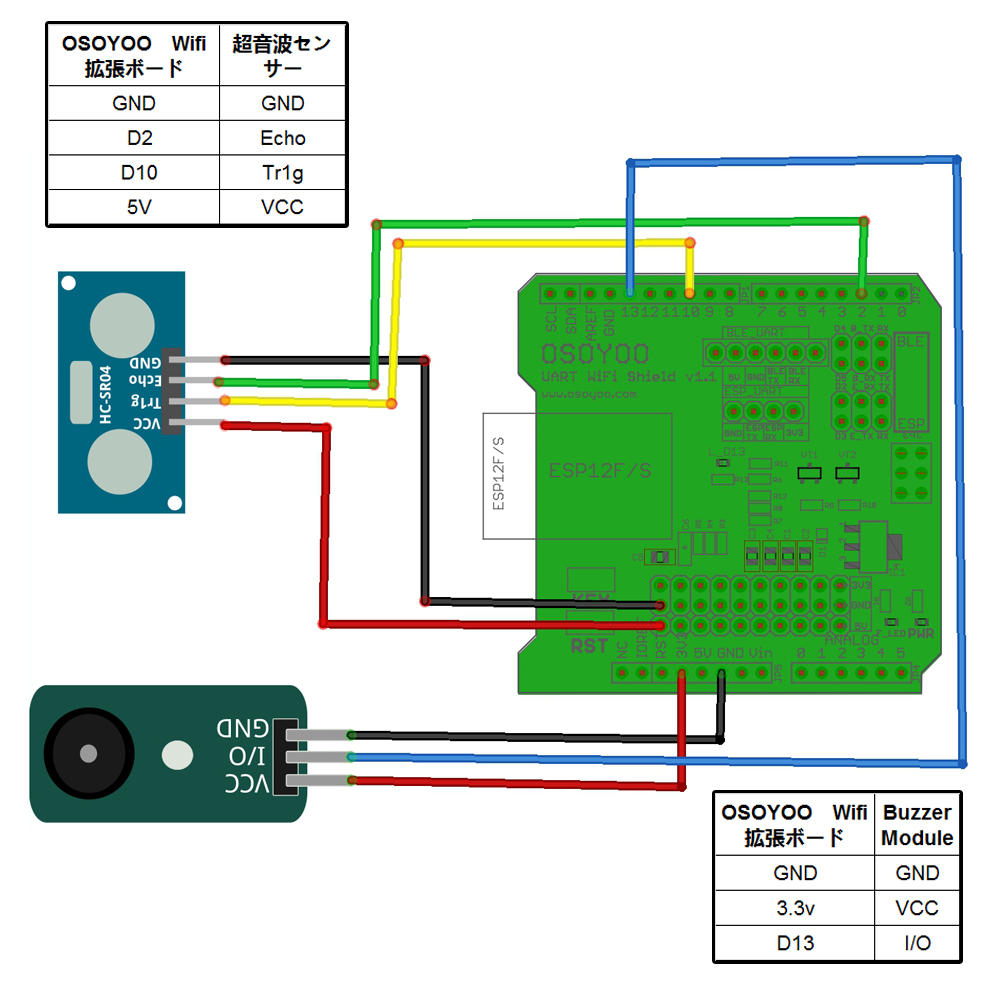
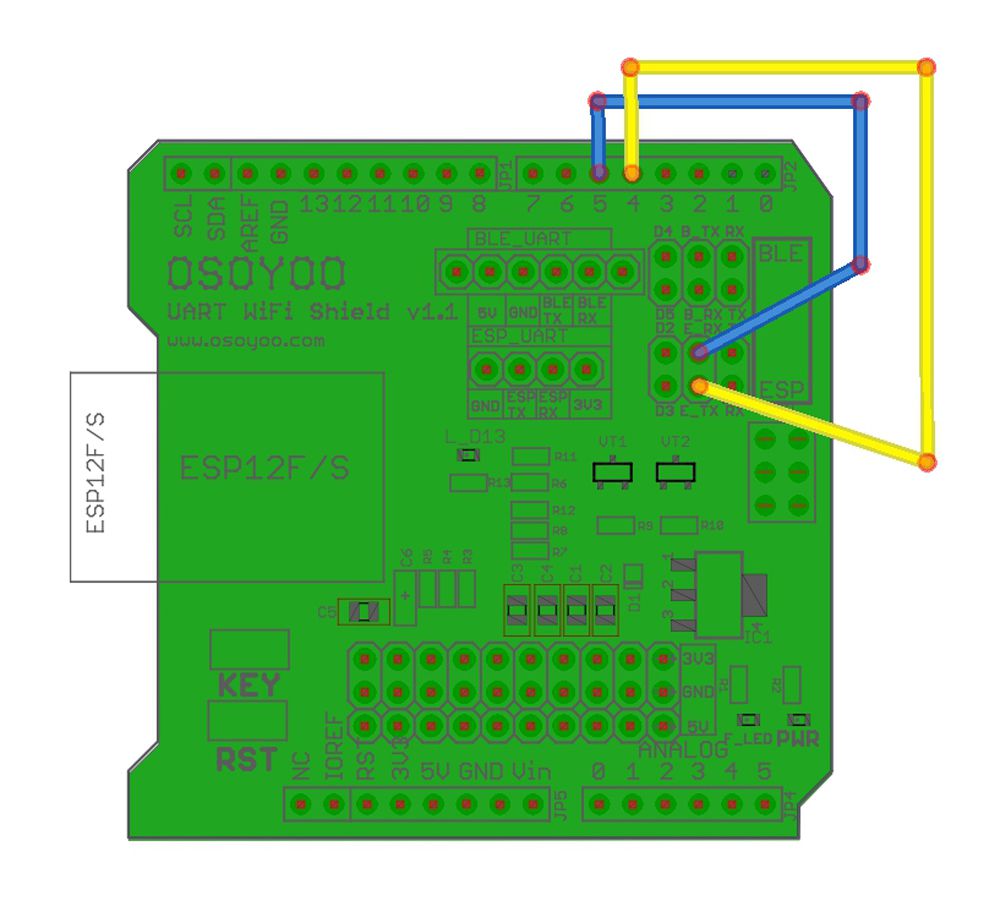



 以上の作業が完了したらLAN接続が完了するので、いわゆるIoT”モノのインターネット”技術を体験していただけます。
以上の作業が完了したらLAN接続が完了するので、いわゆるIoT”モノのインターネット”技術を体験していただけます。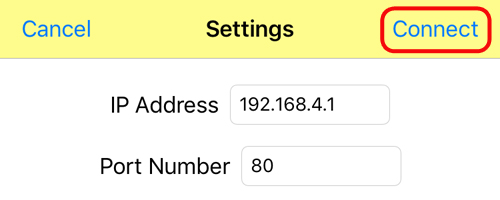 これにてロボットカー自体がWifiスポットとなり、ネット接続が無くても操作が可能となります。
これにてロボットカー自体がWifiスポットとなり、ネット接続が無くても操作が可能となります。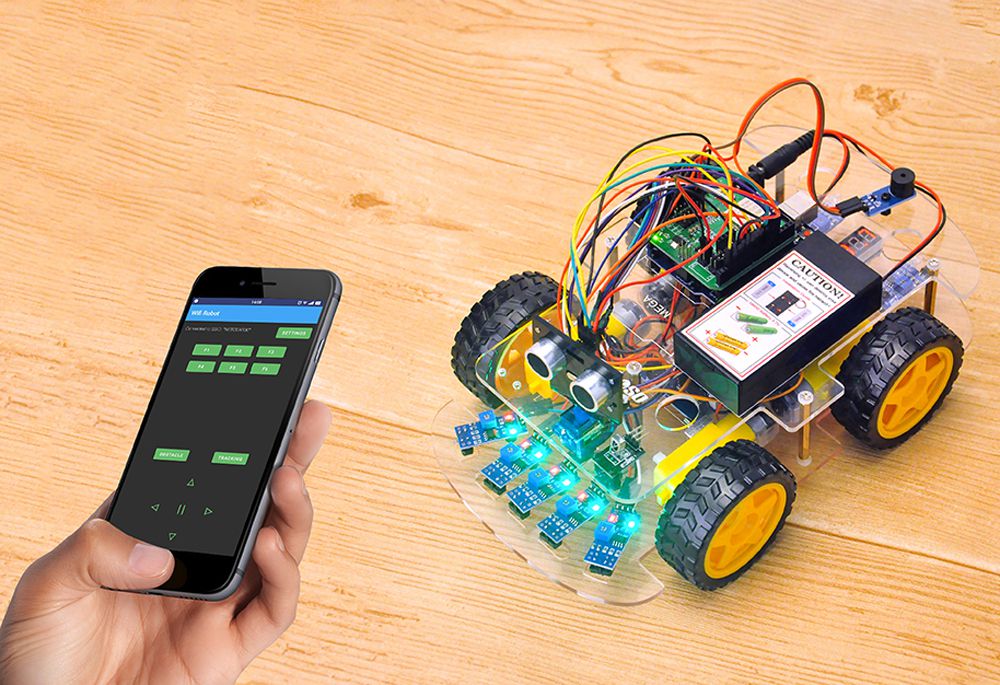
when I go into the app it says Error: cannot connect to robot
First, you are running lesson6A or Lesson6B sketch?
If you are running lesson6 A, did you set your Wifi Route name and password in the Lesson6A sketch? what is the IP address showed serial monitor ?
did you set the IP address of your robot in your APP?
yes I did, and still got the error message, i also charged the batteries again and double-checked the wiring, can you please help.
When you run the Lesson6 sketch in arduino, any error message? What is the Ip address showed in the serial monitor?
there was no error message in Arduino, the Ip address was 192.168.1.233
DID you set the 192.168.1.233 in your cell phone APP? Also make sure your cell phone has connected to the same Wifi network as the robot car.
yes I did, still did not connect
I am not sure how do you know you are not connected. Is there any error message in your cell phone?
Normally when your cell phone is connected your local Wifi network, your APP will show message like Connected to SSID: “xxxxx” , xxxxx is your wifi name, see the RED circle in following picture:
http://osoyoo.com/driver/picar/lesson6wifi.jpg
Did you see your wifi SSID similar to above picture? If not, what did you see?
Hi,
STA mode is working on Android 8.0 but not on newer Android version.
Any special setting on the phones for newer Android versions? Any updated sketch to support newer Android versions?
APP always shows wifi disconnected even if the phone shows it’s connected to the wifi. The serial monitor already shows the car is connected to the wifi.
AP mode not working on Android 6, 8 & 10. APP shows wifi connected osoyoo wifi but no response on the car after pressing any of the buttons.
we have developed a new version APP and tutorial which is based on UDP protocol. Please check following link:
https://osoyoo.com/2020/06/10/osoyoo-v2-robot-car-lesson-6b-use-wifi-udp-to-control-an-iot-robot-car/
Hello,
I can’t connect to the Cr with the APP on Android 10, the car doesn’t drive, doesn’t respond.
I connected all the cables correctly.
The WIFI Shielt sends out WiFi, my cell phone connects to the car but it doesn’t move when I press the buttons.
I solved the problem myself.
https://osoyoo.com/2020/06/10/osoyoo-v2-robot-car-lesson-6b-use-wifi-udp-to-control-an-iot-robot-car/
i apologize for the request.
greeting
Stefan
Hello,
I can’t connect to the Car with the APP on Android 10, the car doesn’t drive, doesn’t respond.
I connected all the cables correctly.
The WIFI Shielt sends out WiFi, my cell phone connects to the car but it doesn’t move when I press the buttons.
I solved the problem myself.
https://osoyoo.com/2020/06/10/osoyoo-v2-robot-car-lesson-6b-use-wifi-udp-to-control-an-iot-robot-car/
i apologize for the request.
greeting
Stefan
Great! How did you solve the problem?
I used the code from
https://osoyoo.com/2020/06/10/osoyoo-v2-robot-car-lesson-6b-use-wifi-udp-to-control-an-iot-robot-car/ .
The car jerks even if there is no obstacle. Can I change this?
Hola , tengo un problema con el código . Me lo podrían solucionar ?
me pone error en la parte de #include “WiFiEsp.h”
y en la parte donde te notifica los errores pone :
v2smartcar-lesson6A:92:10: fatal error: WiFiEsp.h: No such file or directory
#include “WiFiEsp.h”
^~~~~~~~~~~
compilation terminated.
exit status 1
WiFiEsp.h: No such file or directory
Do you have source code available for the iOS app? I am an iOS developer and would like to modify it.