| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |


- BBC micro:bit ボード x1
- OSOYOO ボタンモジュール x 1
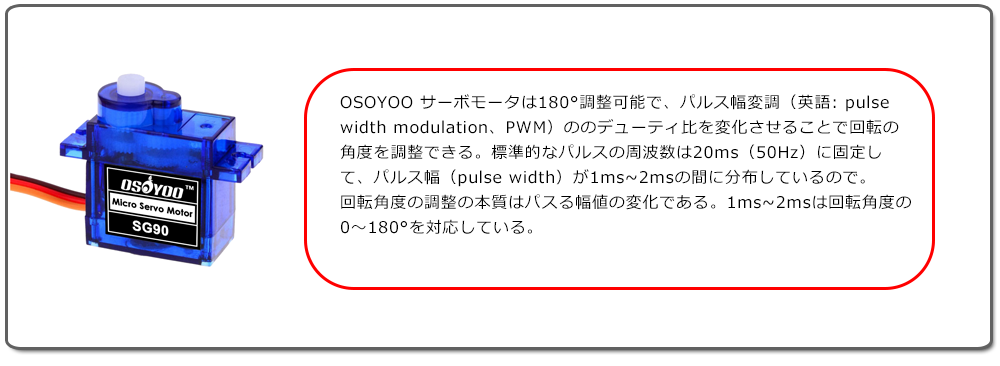
- OSOYOO サーボモータ x 1
- OSOYOO 3-pin PnP ケーブル x 1
- OSOYOO micro:bit用Plug&Play( PnP ) ボード x 1


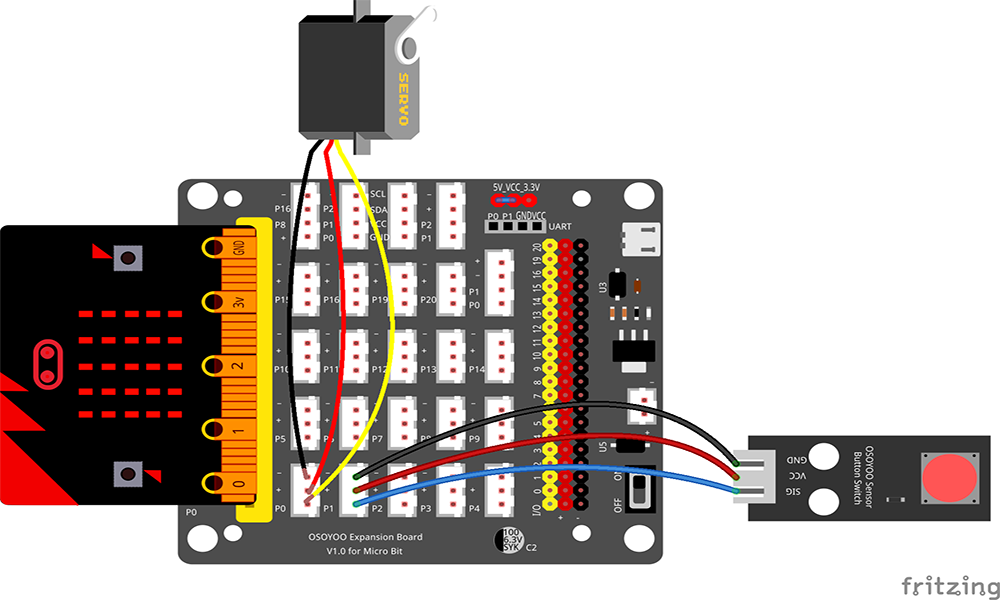
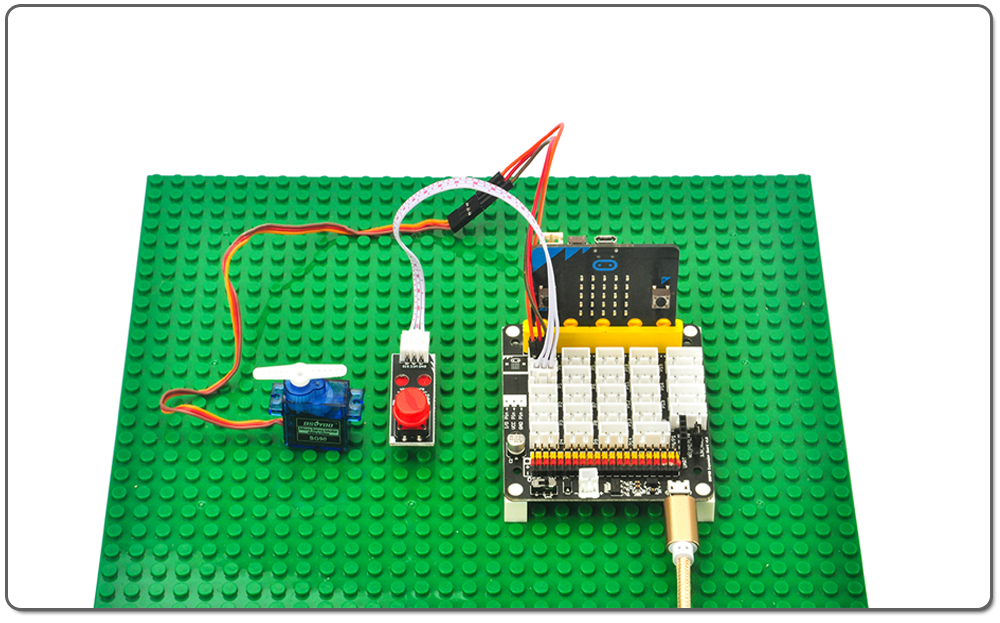
図のように、サーボモータをOSOYOO 3-pin PnP ケーブルで micro:bit用OSOYOO PnPボードの P0 と接続;
ボタンモジュールをOSOYOO 3-pin PnP ケーブルで micro:bit用OSOYOO PnPボードの P1 と接続してください;

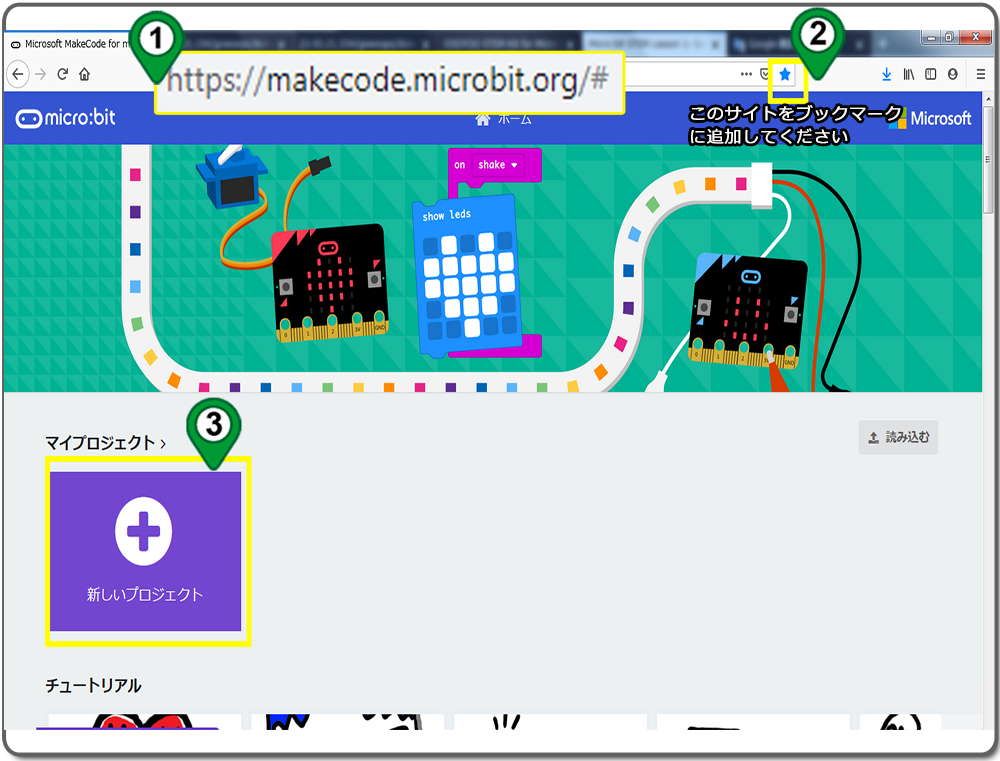
Step 0. ウェブブラウザに https://makecode.microbit.org (①)をアクセスしてmicro:bitのMakeCodeページへ訪問します。次回のアクセス便利のため、星のマーク(②)をクリックして、ブックマークに添付してください。新しいプロジェクトをクリック(③)してください。
MakeCodeの詳細操作・情報はこちらへMakeCodeとは
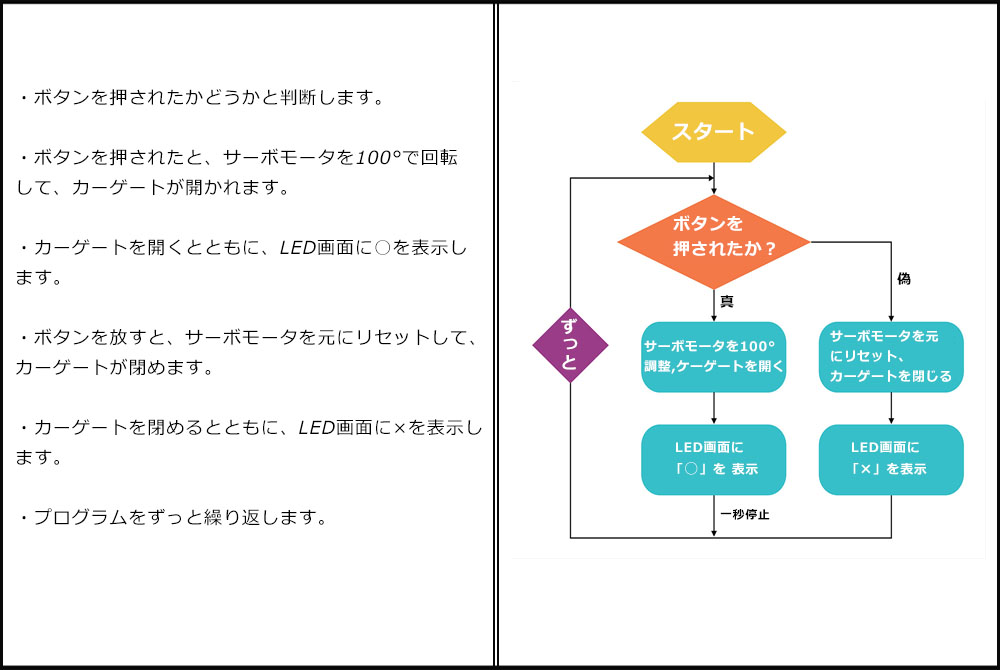
Step 1. ずっと ブロックの中に もし真なら…でなければ ブロック(カテゴリー論理)を置いてください。
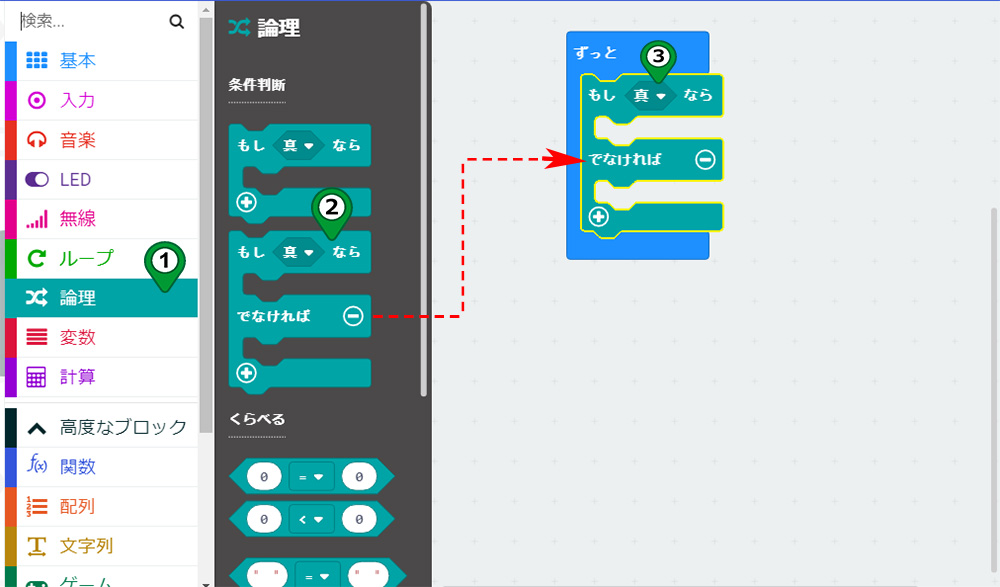
Step 2. もし真なら ブロックの真のところに 0=0 ブロック(カテゴリー論理)を置いてください。

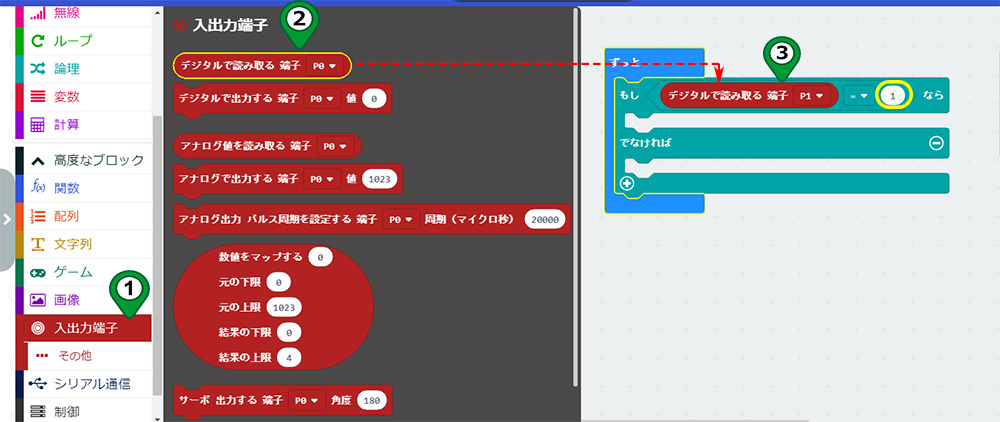
Step 3. もし0=0なら ブロックの左の 0 のところに デジタルで読み取る端子 P0ブロック(カテゴリー入出力端子)を置いて、端子をP0からP1に変更します。そして、右の 0 を1に変更してください。
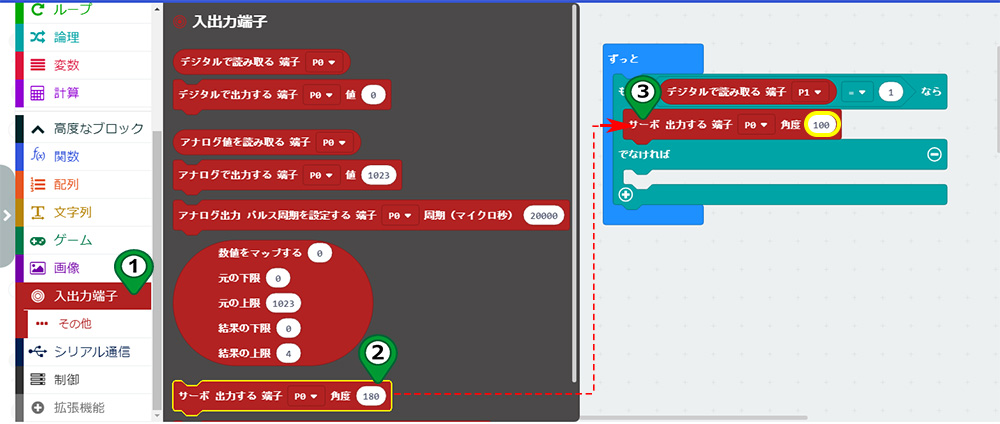
Step 4. もし…なら ブロックの下に サーボ 出力する端子P0 角度 180 ブロック(カテゴリー入出力端子)を置いて、角度を180から100 に変更してください。
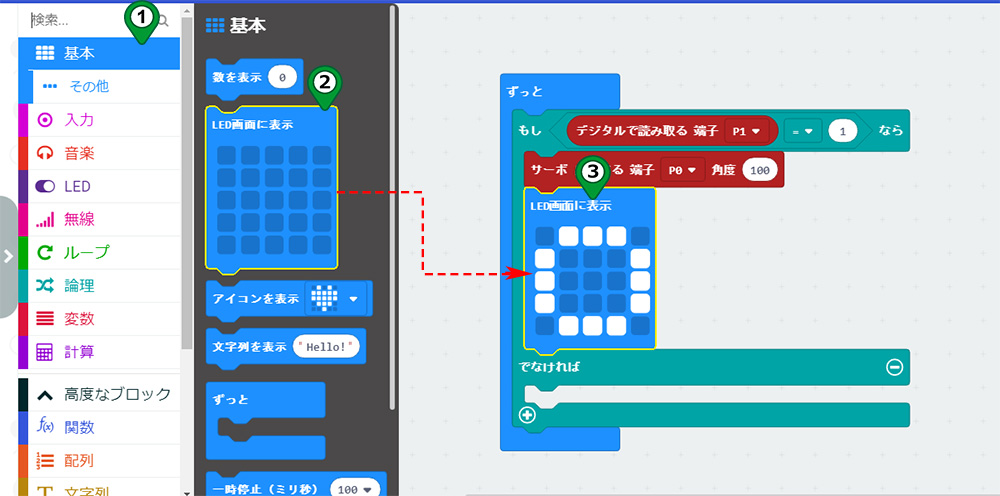
Step 5. もし…なら ブロックの中に led画面に表示 ブロック(カテゴリー基本)を置いてから、図のように、5×5のマトリックス画面に「○」を描いてください。
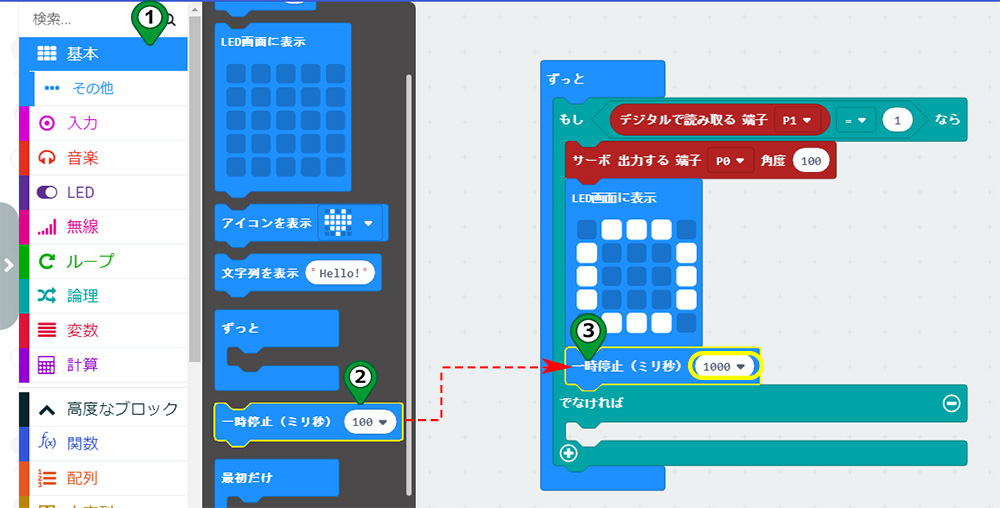
Step 6. もし…なら ブロックの中に、 一時停止(ミリ秒) ブロック(カテゴリー基本)を置いてから、秒数を100から 1000 に変更してください。もしP1=1すなわちP1のボタンモジュールが押されるなら、P0のサーボモータを100°で回って、5×5のLEDマトリックス画面に「○」を表示します。
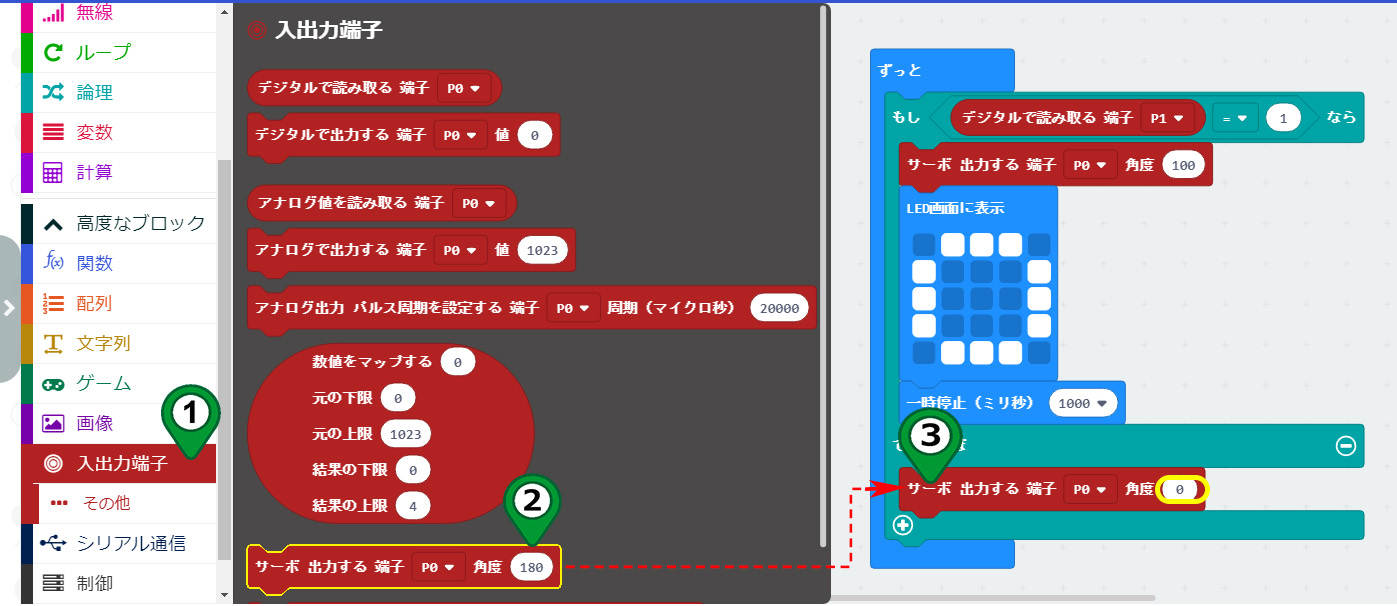
Step 7. でなければ ブロックの下に、 サーボ出力する端子 P0 角度 180 ブロックを置いて、角度を180から0 に変更してください。
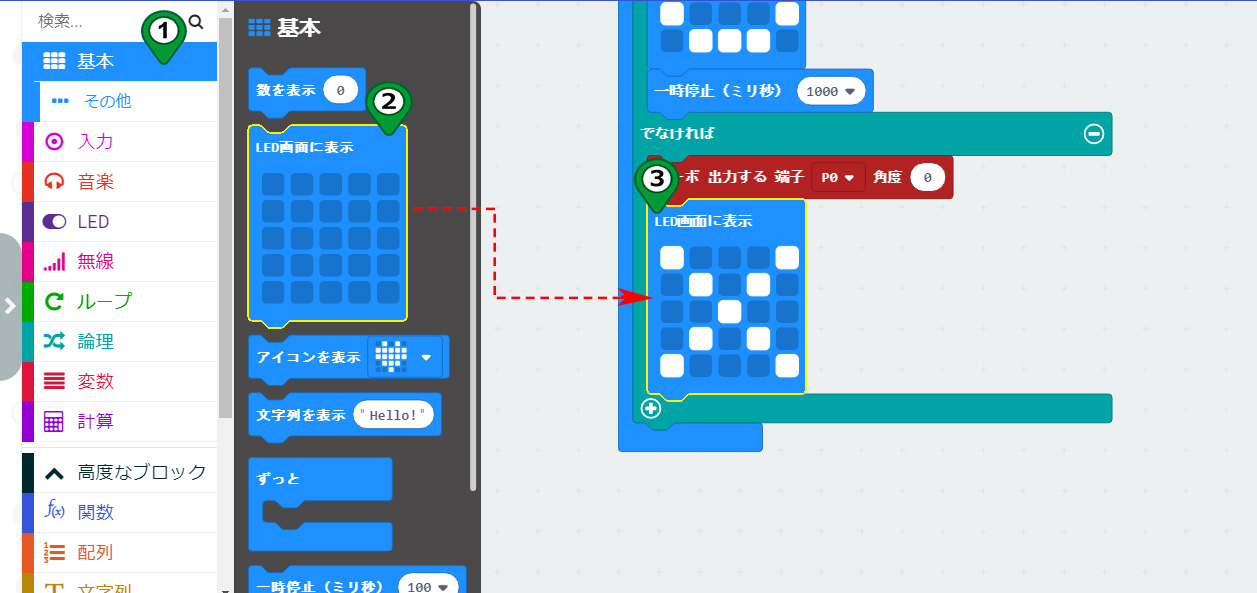
Step 8. でなければ ブロックの中に、 led画面に表示 ブロック(カテゴリー基本) を置いてから、図のように、5×5のマトリックス画面に「×」を描いてください。
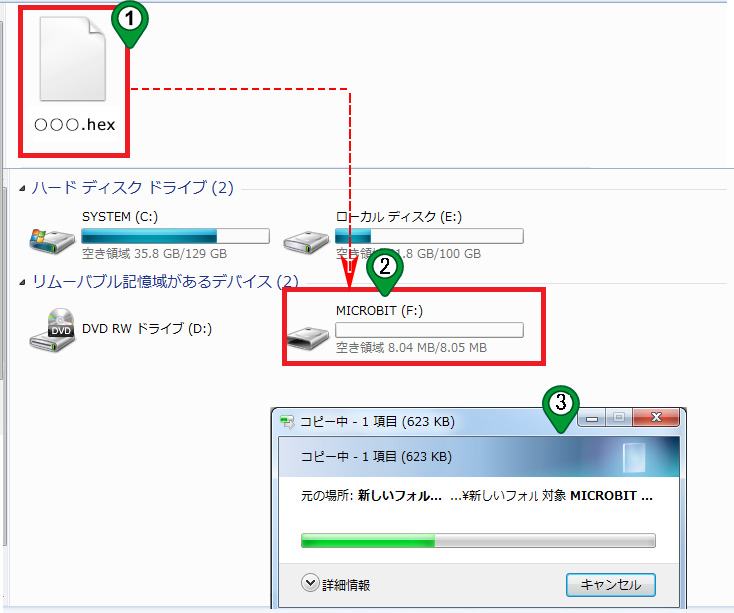
Step 9.プロジェクト完成! 「.hex」ファイルをダウンロードして、 MICROBIT に読み込んでください。
完全版のコードはこちらにもあります、参考してください。