



Mecanum Wheel Robot Car Full Package (with 18650 batteries)
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |
Mecanum Wheel Robot Car Kit Metal Chassis
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
|
|
|
|
|
|
|

Lesson2を開始する前に、まずは
Lesson 1 の組み立てと配線は正しく完成しましたと確認してください。Lesson2では、私達は超音波センサーモジュールを使って、ロボットカーに障害物回避機能を追加します。超音波センサーは障害物を検知したら、センサーから障害物までの距離を測定する原理を使って、閾値を設定ます。センサーの測定値がこの閾値より小さいならば、ブザーは鳴くながら、ロボットカーは障害物を回避します。

OSOYOO ロボットカーシャーシ x 1 (2x右ホイール/2x左ホイール、4×モーター)
OSOYOO MEGA2560 ボード(アルドゥイーノと完全に交換でき) x 1
OSOYOO V1.0 Wifi拡張ボード x 1
OSOYOO Model X モータードライバ x 2
OSOYOO MG90 サーバモーター x 1
OSOYOO 超音波センサーモジュール x1
OSOYOO センサーホルダー
OSOYOO 電池ボックス x 1
18650 電池(3.7V) x 2

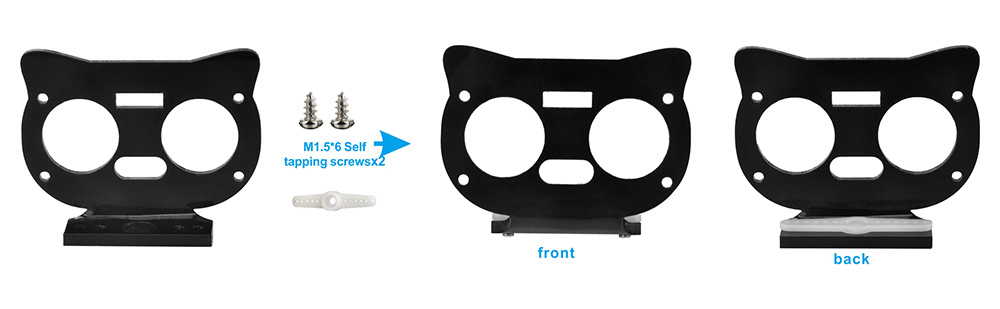
STEP1: ホーン(マイクロサーボパッケージにある)をM1.5*6
タッピンネジでセンサーホルダーに取り付けてください。
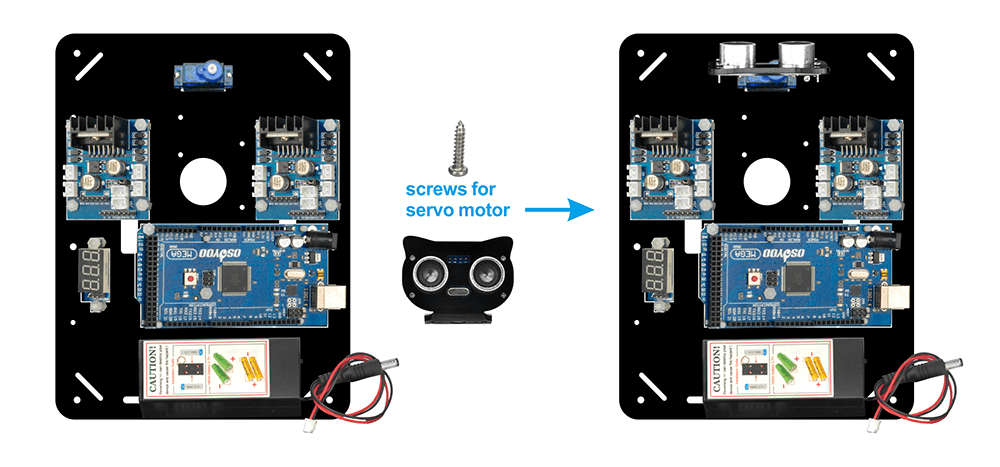
STEP2: 超音波センサーモジュールをM1.4*8ネジとナット(4個)でセンサーホルダーに取り付けてください。

Step 3: Step2で取り付けた超音波センサーをM2*4
ネジでマイクロサーボに取り付けてください。(注意:
取り付ける前に、マイクロサーボにコードをアップロードして、サーボの方向を調整してください。)サーボはlesson 1で、ロボットカーシャーシの前部に M2.2*8のネジで取り付け完了です。

もし Lesson 1,の接続を完了した場合、全ての配線はLesson1のままでよいのです。
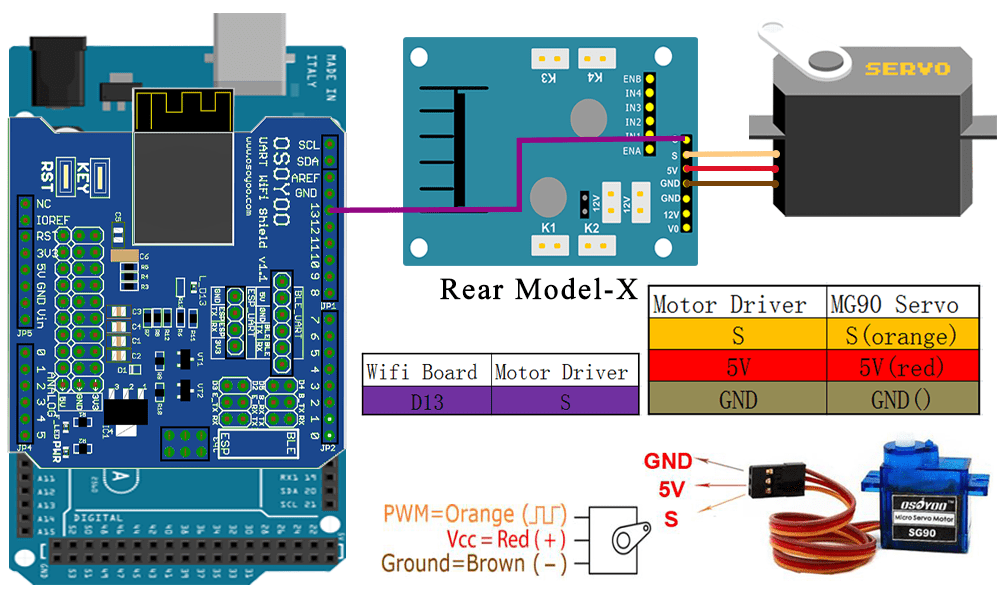
STEP5:マイクロサーボの三つの端子を任意のModel X モータードライバと接続して(黄色ーS端子、赤ー5v端子、ブラウンーG端子)、Model X
の他のS端子をWifi 拡張ボードの D13と接続してください。
STEP6:

Step 1: 最新のアルドゥイーノIDEをインストールしてください。 ( バーショーン1.1.16以降のアルドゥイーノIDE
がインストール済みの場合、直接Step 2 へ)
https://www.arduino.cc/en/Main/Software?setlang=en
をアクセスして、アルドゥイーノIDEがダウンロードできます。
Step 2:
https://osoyoo.com/driver/mecanum_metal_chassis/for_mega2560/metal-2560-lesson2.zip
をアクセスして、ロボットカーを制御できるコー(lmetal-2560-esson2.zip)がダウンロードできます。
Step 3: Step2でダウンロードしたファイルを解凍してから、 mega2560ボードにアップロードしてください。まず、mega2560
ボードとPCをUSB ケーブルで接続して、そして、下図のようにアルドゥイーノIDE -> ファイル -> 開く -> 解凍した「lesson2.ino」を選択します。コードのアップロード完了しました。

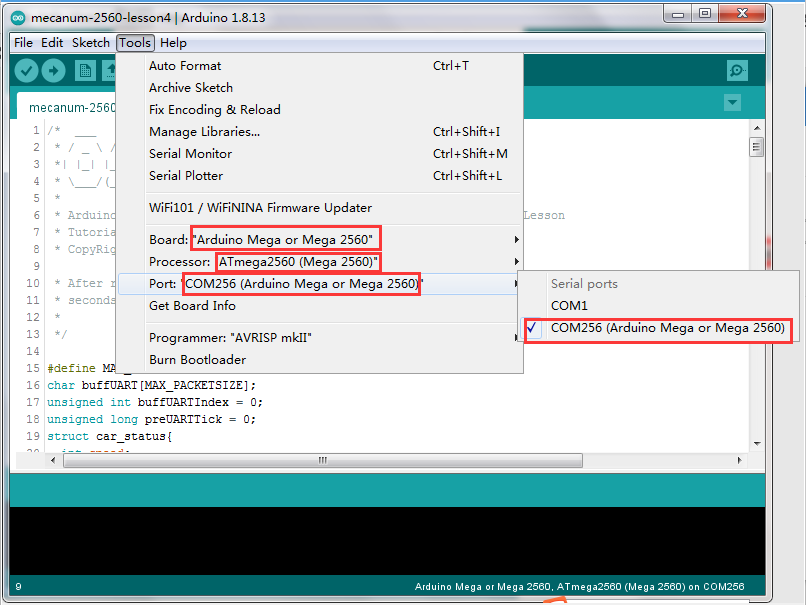
Step 4: ボード/プロセッサを選択してください。
Step 5:超音波センサーの方向の調整方法
電源を入れたら、マイクロサーボは運動した後、最終はある方向に向かって5秒間で停止します。
この5秒で、超音波センサーの双眼を真正面に向かわないと、障害物回避のプログラムが正確に運行できなくなることをご了承してください。
真正面に向かわない場合、電源を切ってから、超音波センサーをマイクロさボーから取り外します。そして、センサーの取り付け方向を調整して、サーボに取り付けます。
もし、調整した後のセンサーも真正面に向かわなければ、もう一度センサーを取り外して、改めて取り付けてください。

電源を入れたら、センサーの双眼が真正面に向かう場合、ロボットカーは5秒間で停止します、もしセンサーが障害物を検知されず、ロボットカーは走行します。走行中に何か障害物を検知されると、ロボットカーは停止して、超音波センサーを右から左へ回転して周囲の障害物を検知します、そして、センサーの検知データとプログラムのアルゴリズムに従って、左折、右折、または後ろに走行することを決めます。
走行中、ロボットカーは衝突してセンサーの位置が変わることがあります、その場合、必ずセンサーの方向を調整してください。












