



Mecanum Wheel Robot Car Full Package (with 18650 batteries)
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |
Mecanum Wheel Robot Car Kit Metal Chassis
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
|
|
|
|
|
|
|

lesson3では、lesson1のロボットカーに追跡センサーを追加します。ソフトウェーアは追跡センサーのデータを読み込んで、スマートロボットカーをブラックラインに沿って走行できるようになります。

OSOYOO メカナムホイールロボットカーシャーシ x 1 (左ホイール×2/右ホイール×2/モーター x 4)
OSOYOO Mega2560 ボード( アルドゥイーノUNO/Mega2560と互換でき) x 1
OSOYOO V1.0 WIFI 拡張ボード x 1
OSOYOO Model X モータードライバ x 2
OSOYOO 追跡センサーモジュール
OSOYOO 電池ボックス x 1
18650 バッテリー(3.7V) x 2

まずはlesson 1 (ロボットカーの組み立て)を正確に完成しましたことを確認してください。
そして、lesson1で作られたロボットカーには追跡センサーを取り付けます。

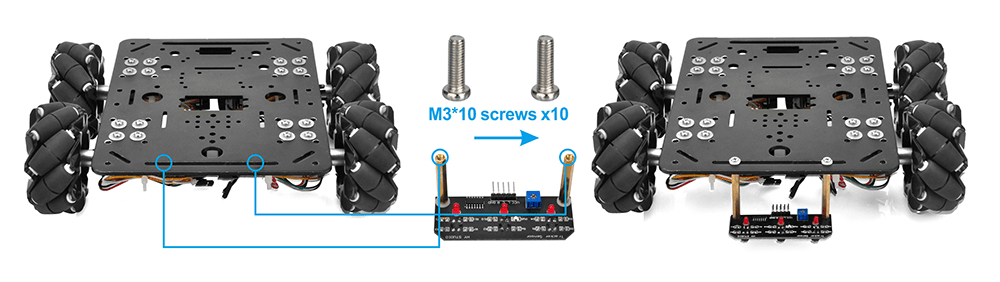

配線も変更不要で、 Lesson 1のままでよろしいです。
追加したばかりの追跡センサーは以下のように接続してください。
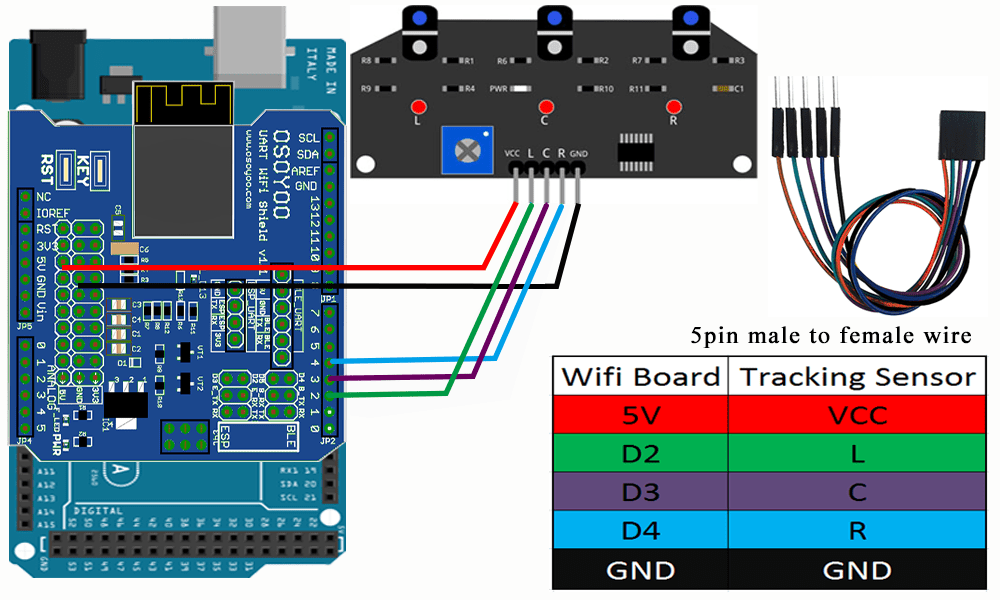
追跡センサーの端子ーVCCをwifi拡張ボードの端子ー 5V と接続;
追跡センサーの端子ーGNDをwifi拡張ボードのGNDと接続;
5pin 20cmのジャンプワイヤー(メス~メス)で追跡センサーの端子ー L, C, R pinsを
wifi拡張ボードのD2、D3、D4と接続してください(lesson1の配線は一切変更しないでください。)。


Step 1: 最新のアルドゥイーノ IDEをインストールしてください (バーショーン1.1.16以降のアルドゥイーノIDEがインストール済みの場合、直接Step2へ)。 https://www.arduino.cc/en/Main/Software?setlang=en
Step 2: https://osoyoo.com/driver/mecanum/mecanum-2560-lesson3.zip 、をアクセスして、アルドゥイーノコードファイル「lesson3.zip」がダウンロードできます。
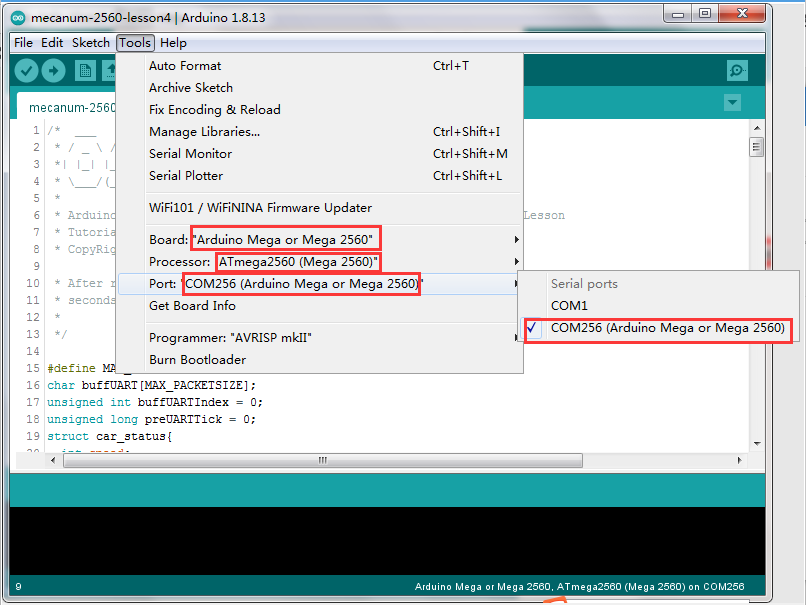
Step 3: 「lesson3.zip」を解凍して、アルドゥイーノIDEに書き込んでください。書き込む手順は下図を参考してください。

Step 4: ボードとプロセッサを選択した後、プログラムをボードに書き込んでください。
Step 5:コードを Mega2560ボードに書き込んだら、追跡センサーの感度を調整します。
补拍图片

白い地面に幅20mm-30mmのブラックトラックを用意してください。トラックの曲がり角はあまり大きくしないようにしてください。そうではないと、ロボットカーはトラックから外れやすくなります。
ロボットカーの電源を入れ、追跡センサーの真ん中をブラックトラックに向けて、ロボットカーを地面に置いてください。
ロボットカーはオートーでトラック沿いに走行します。











