



| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
日本 |
 |
 |
 |
 |
 |
 |
 |

このレッスンでは、このレッスンを続ける前にlesson 1 を 完了する必要があります。超音波モジュールを使用して障害物を「見」、距離を測定します。距離が事前に定義されたしきい値より小さい場合、車は障害物から自動的に向きを変えます。

OSOYOO Mecanum Wheels Robotic Car Chassis x 1(2xleft-wheels / 2xright-wheels and Motor x 4)
OSOYOO Mega2560ボードはArduinoと完全互換x 1
OSOYOO V1.0 Wifiシールドx 1
OSOYOO Model Xモータードライバーx 2
OSOYOO MG90サーボモーターx 1
OSOYOO超音波センサーモジュールx1
OSOYOOマウントホルダー
OSOYOOバッテリーボックスx 1
18650バッテリー(3.7V)x 2

本レッスンを始める前に、lesson 1 (assembling the carを完了させてなければなりません、また次のレッスン3では、車にサーボモーターを追加取り付け致します。
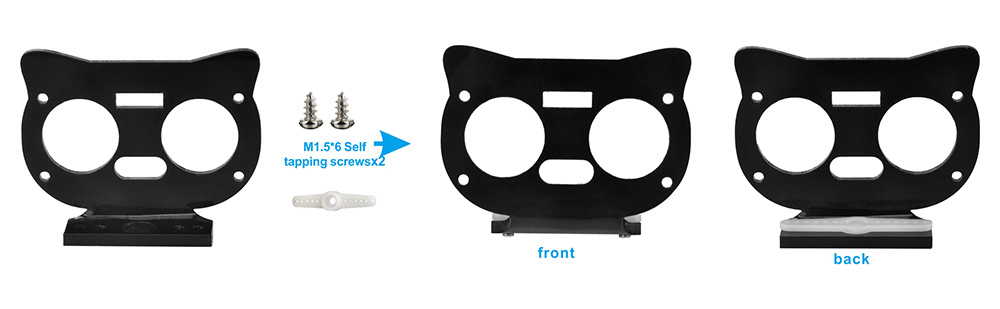
ステップ1: 2個のM1.5 * 6セルフタッピングネジで超音波モジュールのマウントホルダーに(サーボモーターパッケージから)ブラケットを取り付けます。
ステップ2:4本のM1.4 * 8ネジとM1.4ナットでホルダーにマウントする超音波モジュール

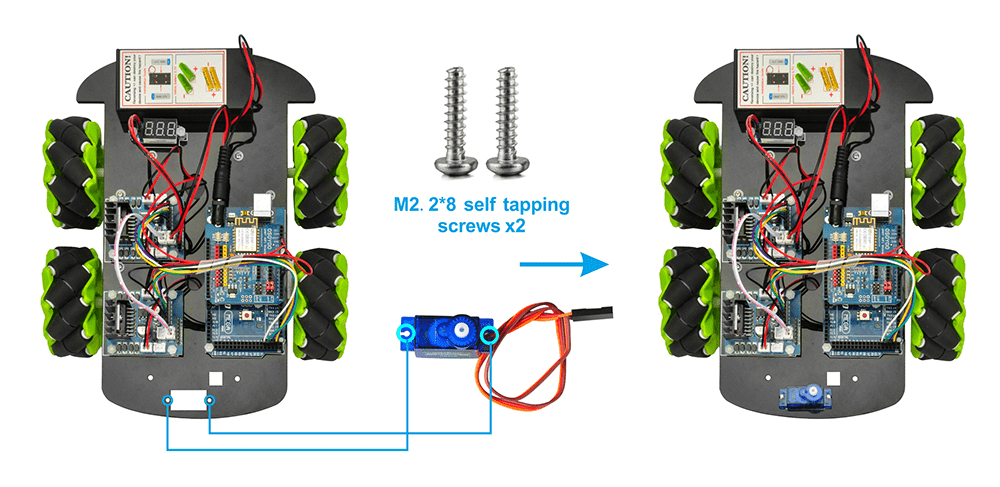
ステップ3:真鍮支柱のネジを取り外し、2本のM2.2 * 8セルフタッピングネジを使用して、上部の車のシャーシの前面にサーボモーターを取り付けます。
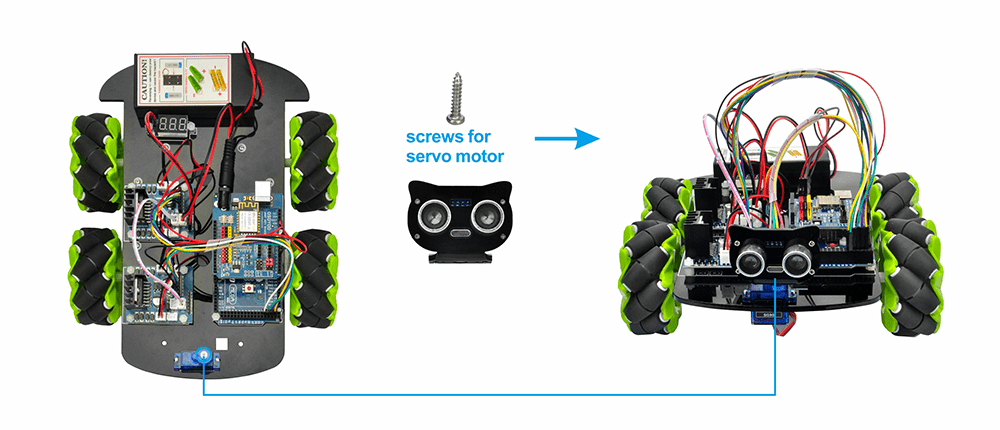
ステップ4: M2 * 4セルフタッピングネジを使用して、サーボモーターに超音波モジュールのマウントホルダーを取り付けます。(注意:このネジを固定する前に、サーボモーターの方向を調整するコードをアップロードしてください)

Lesson 1を終了したばかりの場合は、レッスン1のすべての接続をそのままにしてください。
ステップ5:サーボ3ピンヘッドをモデルXボードのサーボスロットに接続し(黄色からSピン、赤から5v、茶色からGピン)、別のSピンをWifiボードD13に接続します。
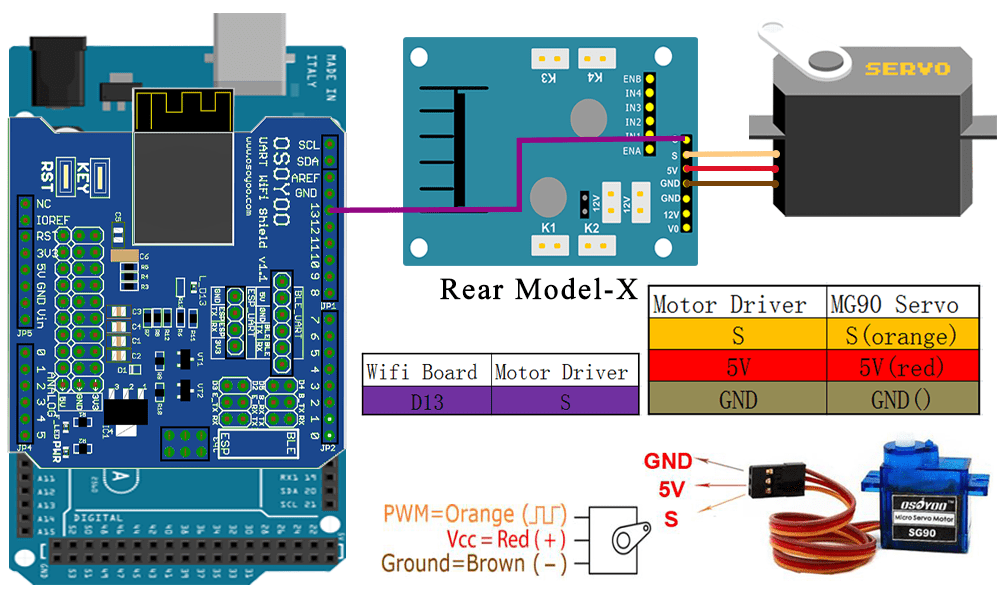
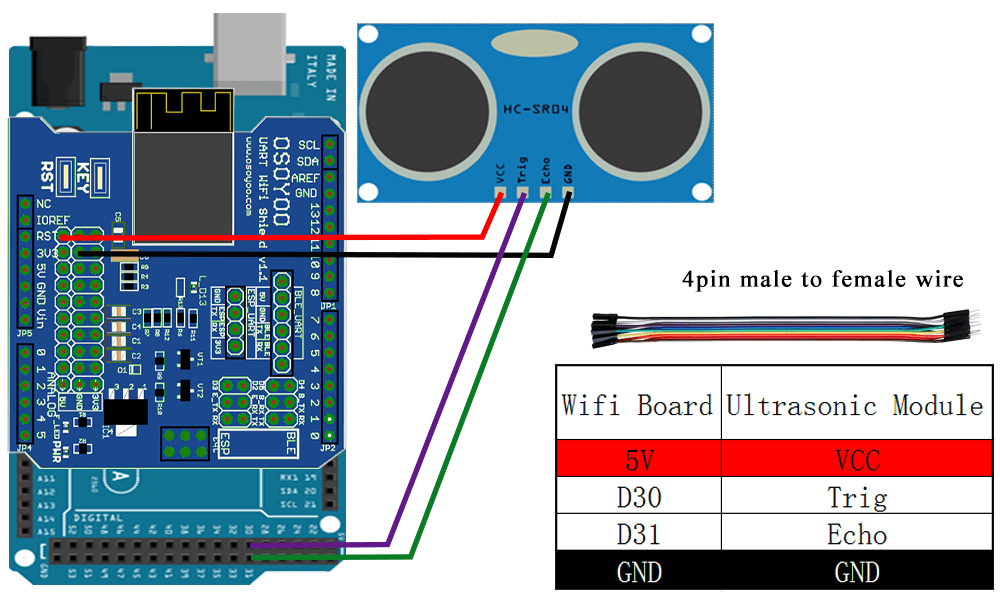
ステップ6:次のグラフのように、超音波センサーモジュールをwifiボードに接続します。

ステップ1:最新のArduino IDEをインストールします(バージョン1.1.16以降のArduino IDEを使用している場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=enからArduino IDEをダウンロードし、ソフトウェアをインストールします。
ステップ2:ダウンロードしhttps://osoyoo.com/driver/mecanum/mecanum-2560-lesson2.zipは、ダウンロードしたzipファイルを解凍しlesson2.zip、あなたはlesson2という名前のフォルダが表示されます。
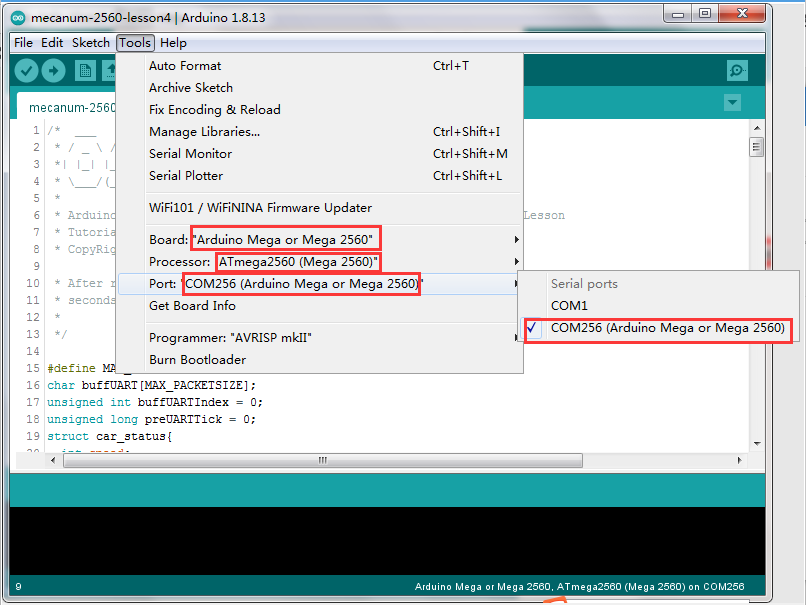
ステップ3: mega2560ボードをUSBケーブルでPCに接続し、Arduino IDEを開く->ファイルをクリックする->開くをクリックする->レッスンフォルダーでコード「lesson2.ino」を選択し、次のようにコードをarduinoにロードします。

ステップ4:プロジェクトに対応するボードとシリアルポートをマウスクリックで選択、スケッチをボードにアップロードします。
ステップ5:超音波センサーサーボの初期方向の調整
バッテリーをオンにした後、サーボはある程度動き、最終的に5秒間停止します。この最初の5秒間、超音波センサー(2つの目)がまっすぐ前を向いていることを確認する必要があります。
まっすぐではない場合は、すぐにバッテリーをオフにし、センサーをサーボから取り外し、次の図のようにセンサーをまっすぐ前方に向けてください。
そうしないと、障害物回避プログラムが適切に機能しません。センサーの方向を調整した後、バッテリーを再度オンにします。方向がまっすぐでない場合は、バッテリーをオフにして、方向を再度調整します。

超音波モジュールが正面の位置に回れば、センサーの位置を調整する必要がなくなります。5秒待ちます。障害物が検出されない場合、車は前進します。障害物が検出されると、車は停止し、超音波モジュールは右から左に回転して周囲の障害物を検出します。
ロボットカーは、障害物センサーのデータと障害物回避アルゴリズムに従って、左折、右折または後進を決定します。車が衝突して超音波センサーの位置が変わる場合がありますが、センサーの方向調整を忘れずに行う必要があります。












