I am confused by your instruction here: Notice: Shut off your battery or Unplug your power adapter when upload sketch code to OSOYOO Basic Board for Arduino.
Are you telling me to make sure the power on and off push button is released in the power off position? If you are telling me to unplug the wire coming from the battery case or to remove the battery from the case, the physical force required to disconnect either of those is going to damage the wire or connectors or the circuit board eventually. If there was a graphic that showed that in a earlier lesson I missed it.
elaine, I am understanding you to mean either unplug the battery wire at connector PWR1, on the Osoyoo circuit board or to remove the battery from the battery case, before connecting the USB cable.
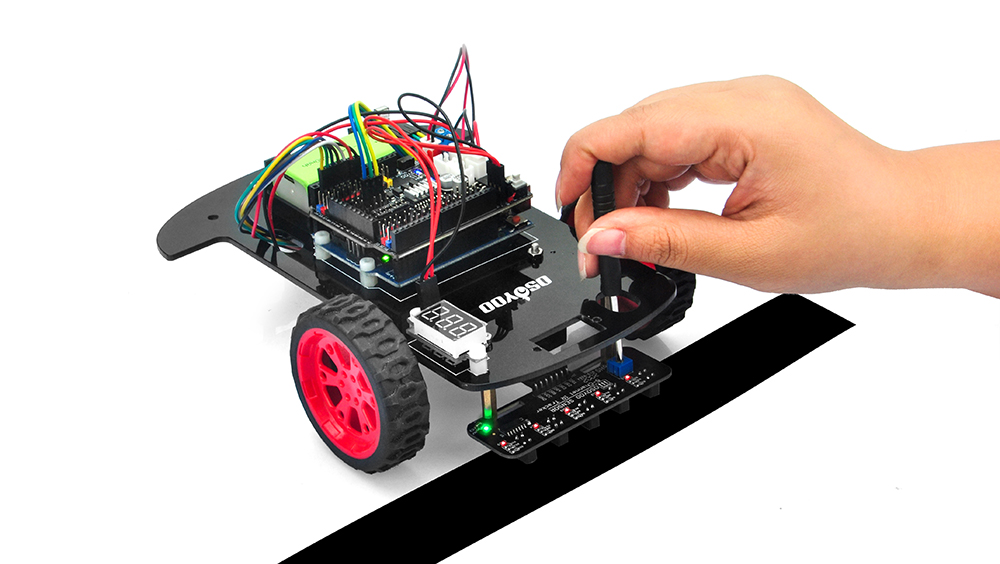
I can’t do the correct movements in Lesson 3. Even after loading, the car does not recognize the black line and keeps spinning. The sensor is responding correctly. How do I run correctly?
I uploaded the code for the line-tracking device, but for some reason it does seem to do what its suppose to. All the led-lights are turned on, but whenever I put on white paper with the black tape, it does not does move or do anything.
Do you mean the tracking module has a defective sensor? if yes, please send us your order number and address to [email protected], our customer service department will mail you a new 5-in-1 tracking sensor.















I am confused by your instruction here: Notice: Shut off your battery or Unplug your power adapter when upload sketch code to OSOYOO Basic Board for Arduino.
Are you telling me to make sure the power on and off push button is released in the power off position? If you are telling me to unplug the wire coming from the battery case or to remove the battery from the case, the physical force required to disconnect either of those is going to damage the wire or connectors or the circuit board eventually. If there was a graphic that showed that in a earlier lesson I missed it.
GJR
To make use safety, please make sure the power(from battery case) off, then connect the board to your PC via USB cable.
elaine, I am understanding you to mean either unplug the battery wire at connector PWR1, on the Osoyoo circuit board or to remove the battery from the battery case, before connecting the USB cable.
Thanks for the help.
GJR
I can’t do the correct movements in Lesson 3. Even after loading, the car does not recognize the black line and keeps spinning. The sensor is responding correctly. How do I run correctly?
Hello. How are you doing?
I uploaded the code for the line-tracking device, but for some reason it does seem to do what its suppose to. All the led-lights are turned on, but whenever I put on white paper with the black tape, it does not does move or do anything.
Hello,
one LED on five doesn’t work, or sometimes this is the only one whick works, i really don’t know why, could you help us ?
Do you mean the tracking module has a defective sensor? if yes, please send us your order number and address to [email protected], our customer service department will mail you a new 5-in-1 tracking sensor.