


I.目的
II.パーツとデバイス
III.ハードウェアの取り付け
IV.ソフトウェアのインストール
VI.遊び方

| Buy from US |
Buy from UK |
Besorgen DE |
Acquistare IT |
Acheter FR |
Comprar ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

このレッスンでは、ライン追跡自動運転プロジェクトを行います。レッスン1で作成したロボットカーに5ポイントトラッキングセンサーモジュールを追加します。このレッスンのソフトウェアは、5ポイントトラッキングセンサーモジュールからデータを読み取り、スマートカーを白地の黒いトラックラインに沿って自動的に移動させます。
ライン追跡プロジェクトを行う前に、Lesson 1を完了する必要があります。

必要なパーツは以下の通りです。
・OSOYOO Mecanumホイールロボットカーシャーシ x1
・OSOYOOホイールとモーター x4 (左ホイールx2/右ホイールx2)
・OSOYOO Mega2560ボード(Arduino UNO/Mega2560と完全互換) x1
・OSOYOO Uart WIFIシールド x1
・OSOYOOモデルYドライバーボード x1
・OSOYOO電圧計 x1
・OSOYOO 5ポイントトラッキングセンサーモジュール x1
・OSOYOOバッテリーボックス x1
・OSOYOO 3ピンオス-オスジャンパーワイヤ x1
・OSOYOO 6ピンメス-オスジャンパーワイヤ x2
・OSOYOO 7ピンオス-オスジャンパーワイヤ x1
・OSOYOO 2ピンXH.25オス-オス x1
・18650バッテリー(3.7V) x2
・バッテリーチャージャー x1

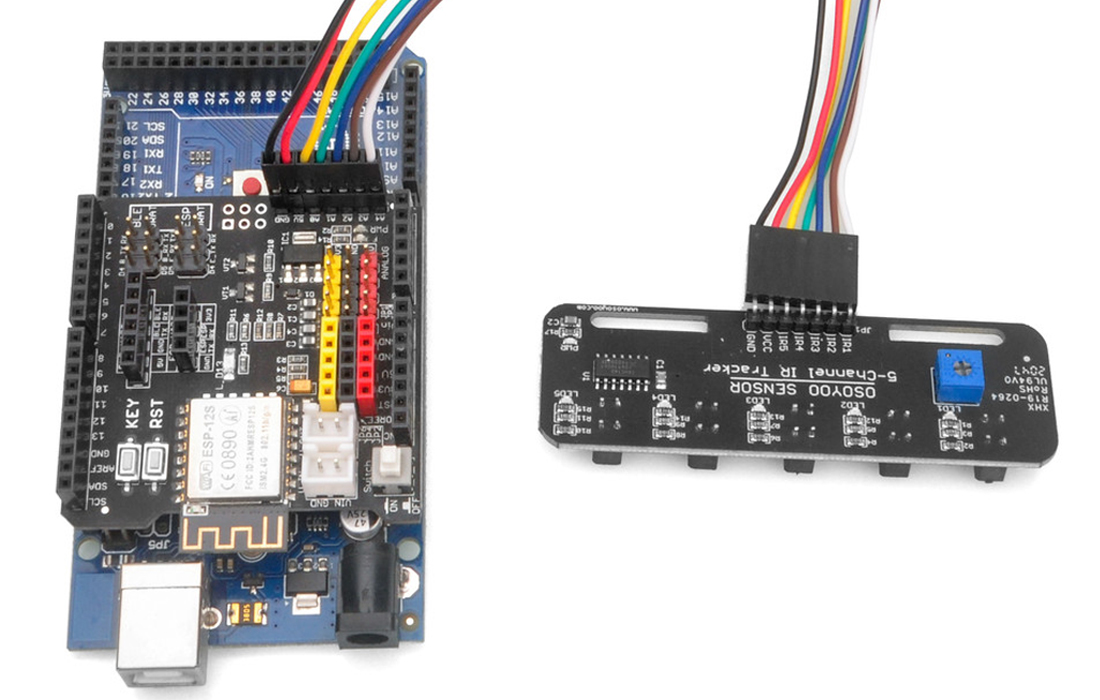
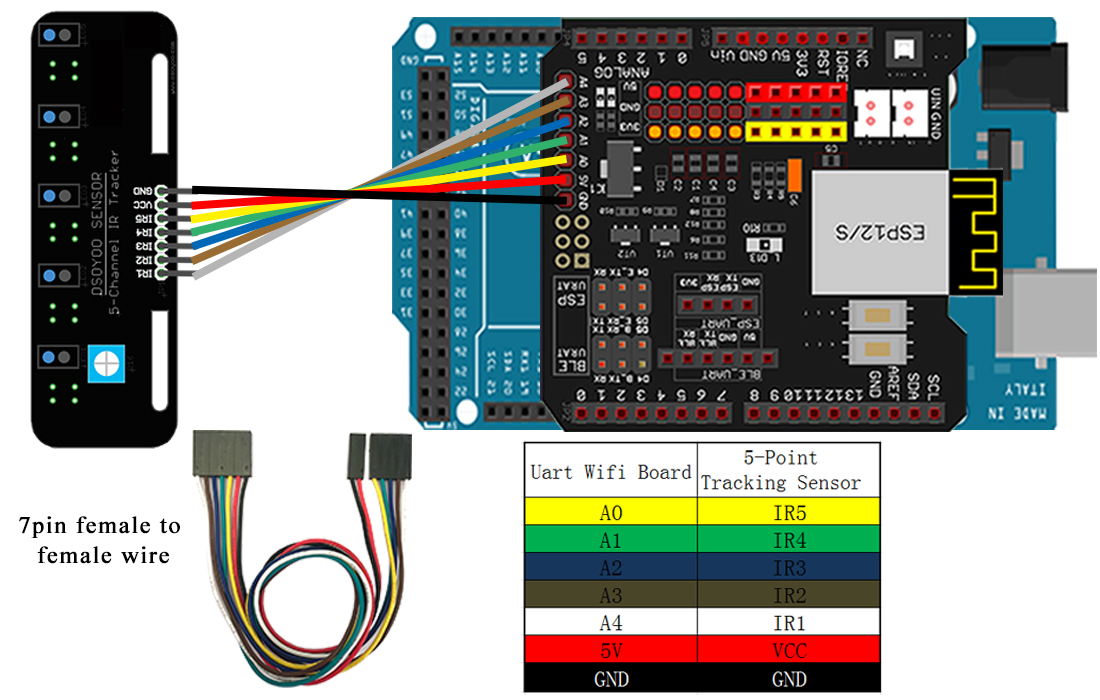
1)レッスン1で使用したワイヤーはそのまま残してください(レッスン1で接続したワイヤーを取り外さないように注意してください)。
2)トラッキングセンサーモジュールのGND-VCCピンをOSOYOO Uart WiFiシールドV1.3のGND-5Vに接続し、IR1、IR2、IR3、IR4、IR5ピンを以下の写真に示すように7ピン25cmオス-オスのケーブルでA4、A3、A2、A2、A1に接続します。

Step 1:最新のArduino IDEをインストールします(Arduino IDEのバージョンが1.1.16以降の場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=en からArduino IDEをダウンロードして、ソフトウェアをインストールします。
Step 2: https://osoyoo.com/driver/mecanum_acrylic_chassis_v2/mc-lesson3.zipをダウンロードし、ダウンロードしたzipファイルmc-lesson3.zipを解凍すると、mc-lesson3.zipというフォルダが表示されます。
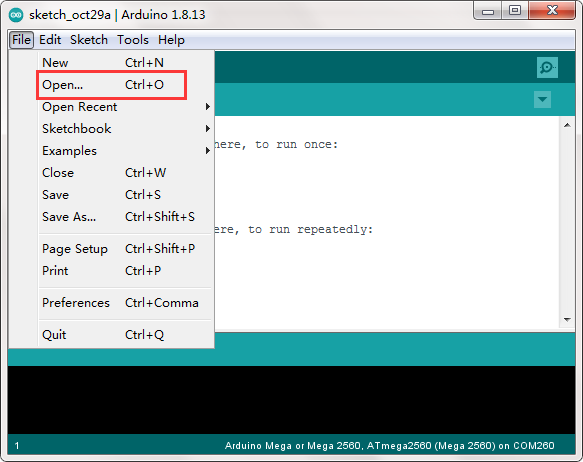
Step 3: USBケーブルを使用してMega2560ボードをPCに接続し、Arduino IDEを開き、ファイルをクリックしてからオープンをクリックし、lesson3フォルダ内の「lesson3.ino」というコードを選択して、Arduinoにコードをロードします。
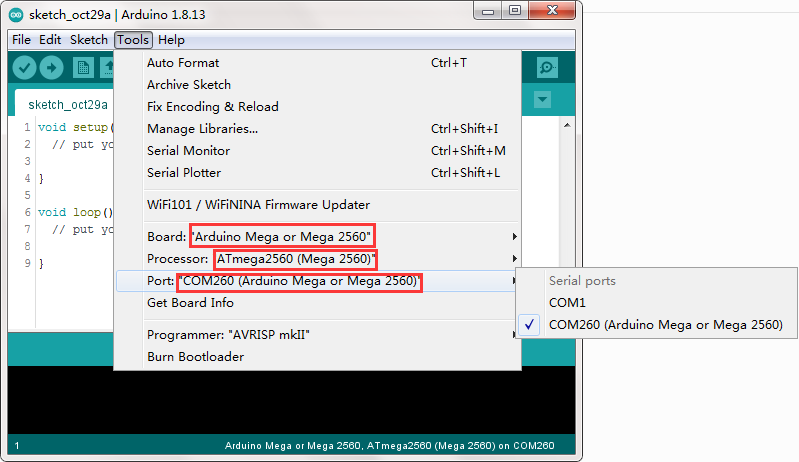
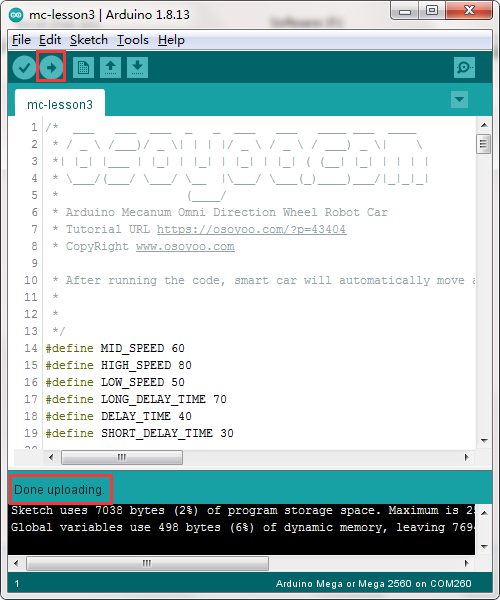
Step 4: プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。

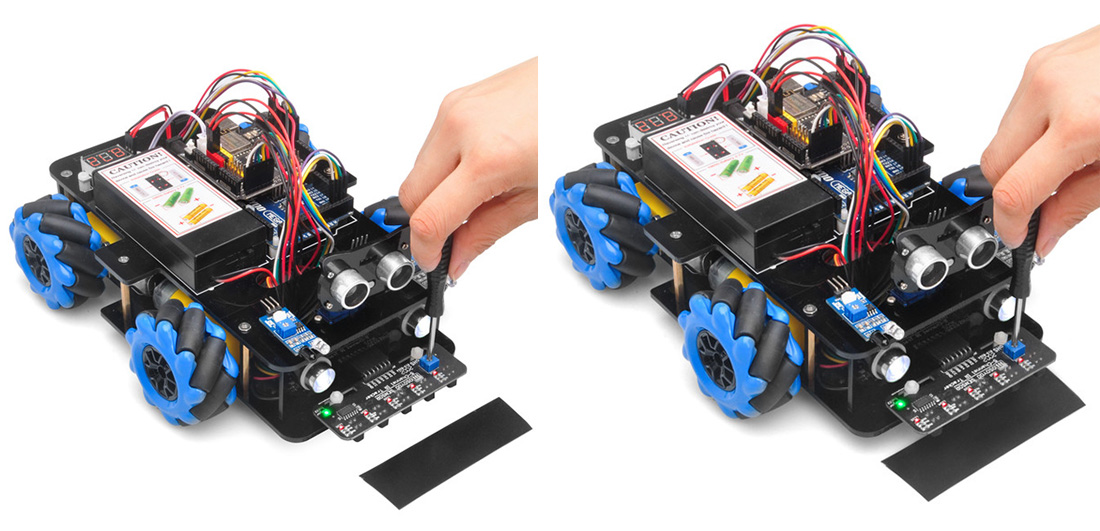
トラッキングセンサーモジュールの感度を調整します
バッテリーボックスをオンにし、車を持ってトラッキングセンサーのポテンショメータをフィリップスドライバーで調整し、最適な感度状態を取得します。つまり、センサーが黒いトラックの上にあるときに信号を示すLEDが点灯し、センサーが白い地面の上にあるときに信号LEDが消灯する状態です。
最終テスト:
白地面に黒いトラック(幅は20mm以上30mm未満)を準備します。トラックの曲がり角はあまり急でないように注意してください。そうしないと、車がトラックから外れてしまいます。
車の電源を入れ、トラッキング センサー モジュールの中央を黒いトラックに向けると、車は黒いトラックに沿って移動します。











