In dieser Lektion werden wir ein Projekt zur automatischen Linienverfolgung durchführen. Wir werden ein 5-Punkt-Tracking-Sensor-Modul zum Roboter-Auto hinzufügen, das in Lektion 1 gebaut wurde. Die Software in dieser Lektion liest Daten vom 5-Punkt-Tracking-Sensor-Modul und führt das Smart Car automatisch entlang der schwarzen Linie auf dem weißen Boden.
Lektion 1 muss abgeschlossen sein, bevor dieses Linienverfolgungsprojekt durchgeführt wird.
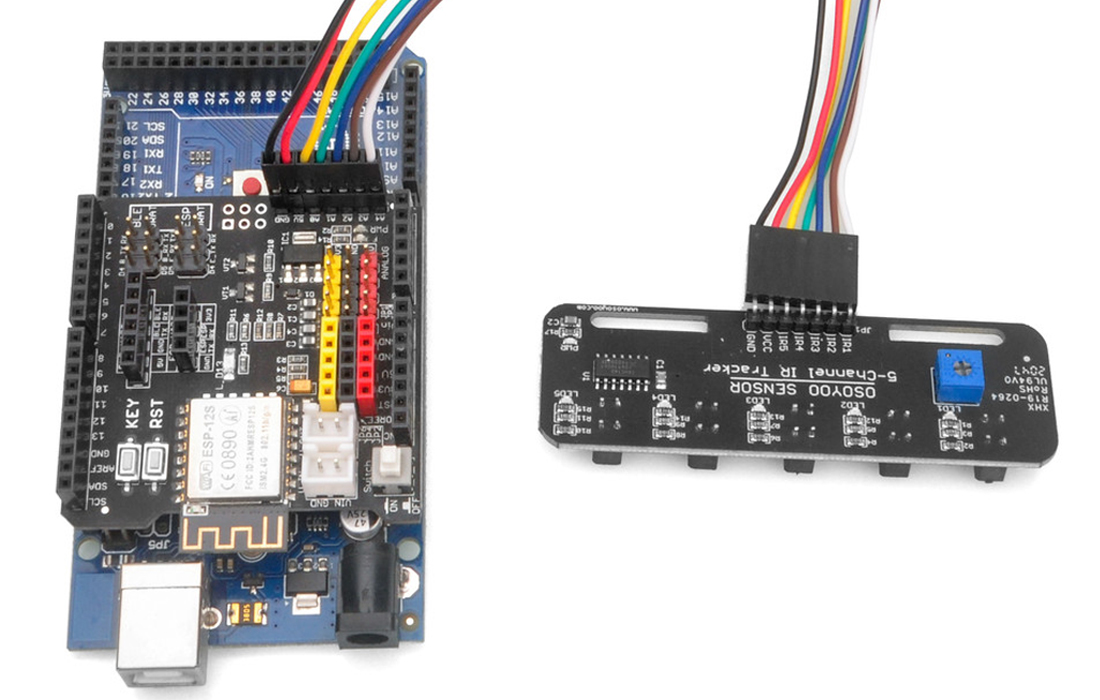
1)Bitte behalten Sie alle Verbindungen aus Lektion 1 unverändert. (Denken Sie daran: Entfernen Sie keine bereits in Lektion 1 installierten Kabel).
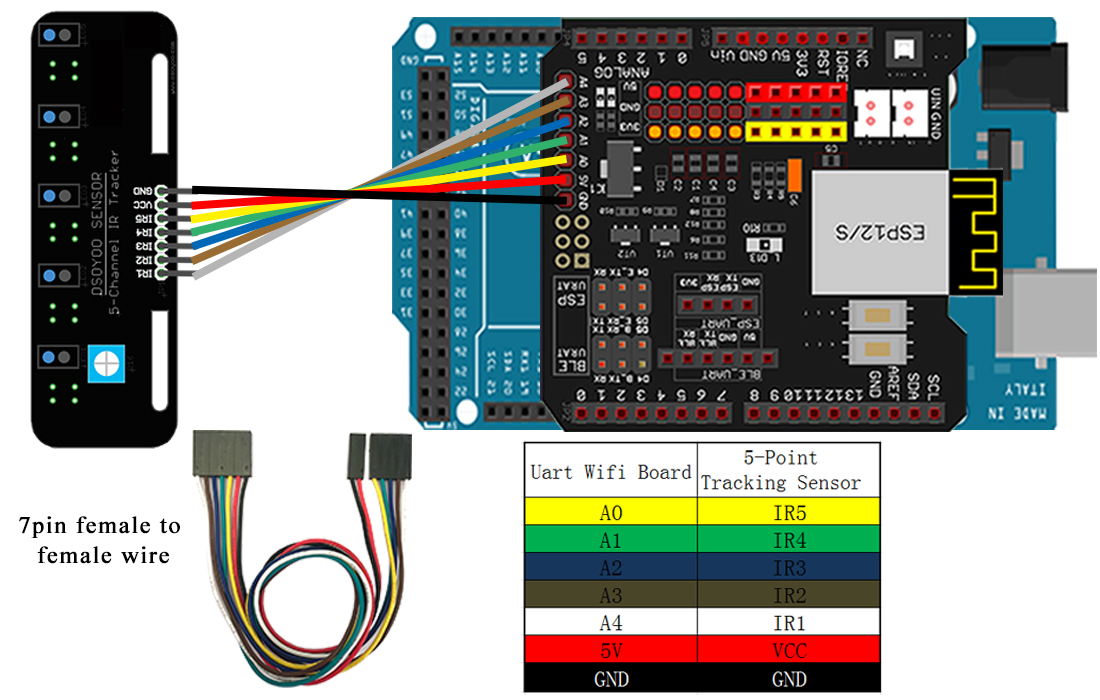
2) Verbinden Sie den GND-VCC-Pin des Tracking-Sensor-Moduls mit GND-5V des OSOYOO Uart Wi-Fi-Shields V1.3. Verbinden Sie die IR1-, IR2-, IR3-, IR4-, IR5-Pins mit A4, A3, A2, A2, A1 mit einem 7-poligen 25-cm-Weiblich-zu-Weiblich-Kabel, wie auf dem folgenden Foto gezeigt.
Schritt 1: Installiere die neueste Arduino IDE (Wenn du bereits Arduino IDE Version 1.1.16 oder neuer hast, überspringe diesen Schritt bitte). Lade die Arduino IDE von https://www.arduino.cc/en/Main/Software?setlang=en, herunter und installiere die Software.
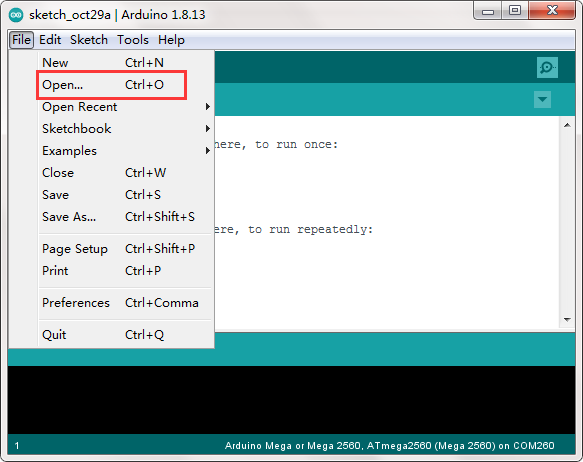
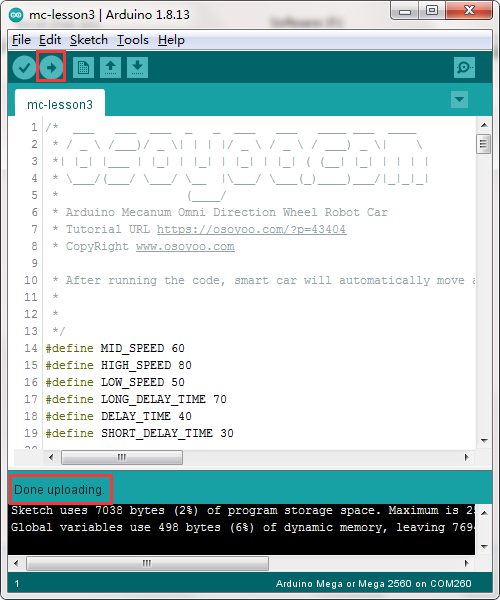
Schritt 3: Verbinde das Mega2560-Board mit dem PC über das USB-Kabel. Öffne die Arduino IDE, klicke auf “Datei” und dann auf “Öffnen”. Wähle den Code “lesson3.ino” im Ordner lesson3 aus und lade den Code in den Arduino.
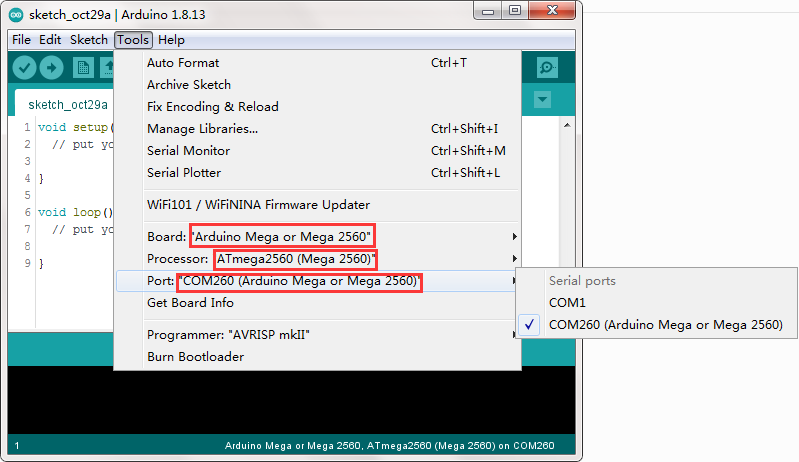
Schritt 4: Wähle das entsprechende Board/Port für dein Projekt aus und lade den Sketch auf das Board hoch.
Stelle die Empfindlichkeit der Tracking-Sensor-Module ein.
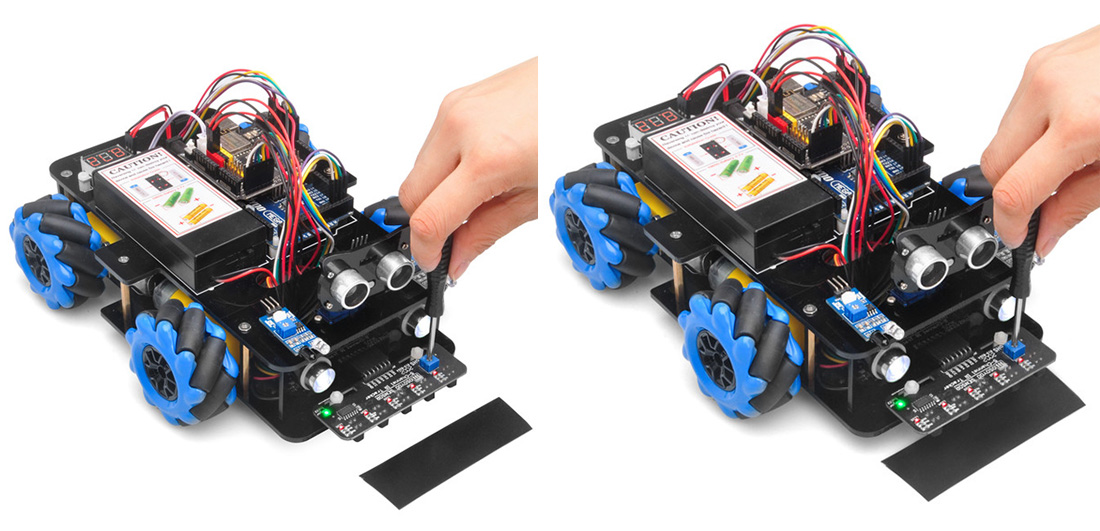
Schalte die Batteriebox ein und halte das Auto fest. Drehe den Potentiometer am Tracking-Sensor mit einem Kreuzschlitzschraubendreher, bis du den besten Empfindlichkeitszustand erreichst: Die Signal-LED leuchtet auf, wenn der Sensor über der schwarzen Spur ist, und die Signal-LED erlischt, wenn der Sensor über dem weißen Boden ist.
Abschlusstest:
Bereite eine schwarze Spur vor (die Breite der schwarzen Spur sollte mehr als 20 mm und weniger als 30 mm betragen) auf weißem Boden. Beachte bitte, dass der Kurvenwinkel der Spur nicht zu scharf sein darf, da das Auto sonst aus der Spur gerät.
Schalte das Auto ein und richte die Mitte des Tracking-Sensor-Moduls über der schwarzen Spur aus. Das Auto wird dann der schwarzen Spur entlang fahren.