


I.目的
II.パーツとデバイス
III.ハードウェアの取り付け
IV.ソフトウェアのインストール
VI.遊び方

| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

このレッスンでは、モバイルアプリを使用してロボットカーを制御し、模擬運転を行います。模擬運転なので、アプリ内の仮想ステアリングホイールやギアを使用して、実際の車両と同じように操作します。

必要な部品は以下の通りです。
・OSOYOO Mecanumホイールロボットカーシャーシ x1
・OSOYOOホイールとモーター x4(左ホイールx2/右ホイールx2)
・OSOYOO Mega2560ボード(Arduino UNO / Mega2560に完全互換性) x1
・OSOYOO Uart WIFIシールド x1
・OSOYOOモデルYドライバーボード x1
・OSOYOO電圧計 x1
・OSOYOO Bluetoothモジュール x1
・OSOYOOバッテリーボックス x1
・OSOYOO 3ピンオス-メスジャンパーワイヤー x1
・OSOYOO 6ピンオス-メスジャンパーワイヤー x2
・OSOYOO 10ピンオス-メスジャンパーワイヤー x1
・OSOYOO 2ピンXH.25メス-メス x1
・18650バッテリー(3.7V)x2
・バッテリーチャージャー x1

Step 1: このレッスンを続ける前に、lesson 1(車の組み立て)を完了する必要があります。
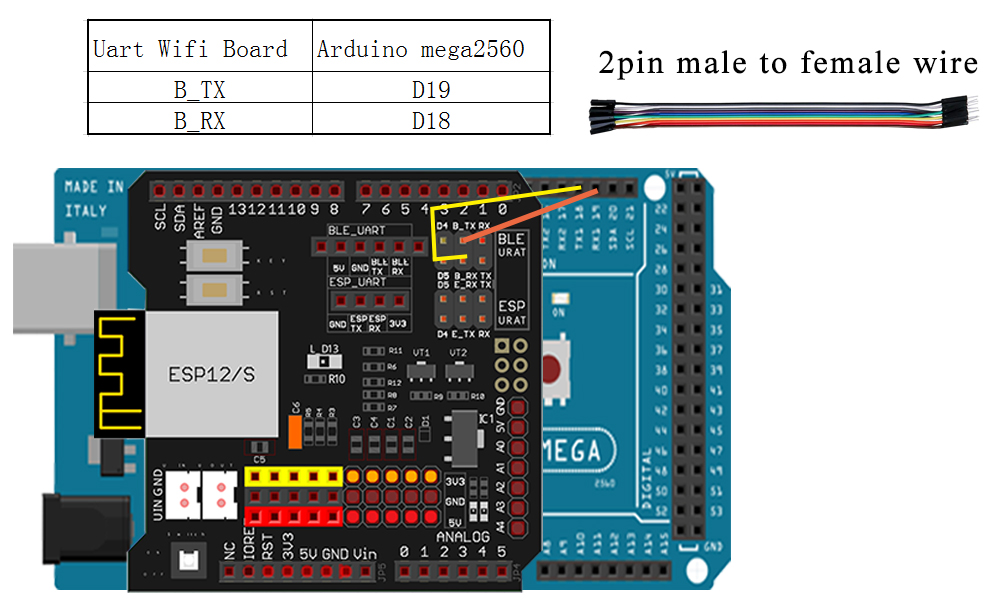
Step 2: ジャンパーワイヤーを使用してBluetooth TX / RXポートをD19、D18に接続します。
(注:10ピンのジャンパーワイヤーバンドルからメス-メスのジャンパーワイヤー2本を分離する必要があります。バンドルからの任意の色を使用できます。残りの8本のワイヤーは、潜在的な故障や損傷用の予備部品として利用できます。)
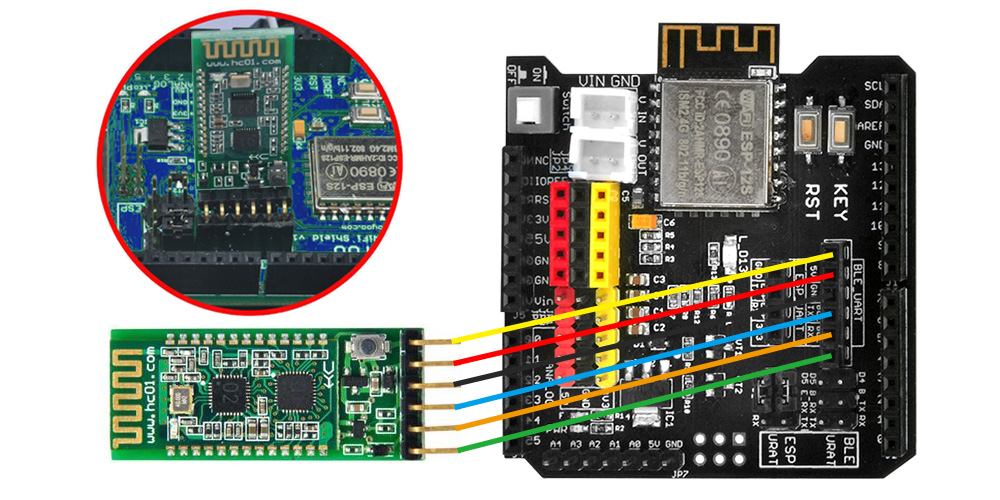
BluetoothモジュールをOSOYOO WIFIボードのBluetooth 6ピンスロットに挿入します。
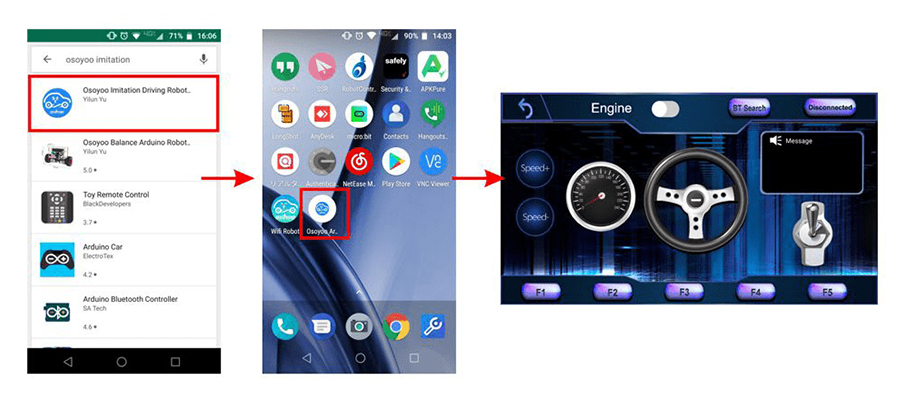
Step 4: モバイルアプリ:
Google PlayまたはApple APPストアにアクセスし、「OSOYOO imitation driving」という名前のアプリを検索して、以下のようにダウンロードしてスマートフォンにインストールします。
- Androidの電話でHC-02 Bluetoothに接続します。 AndroidアプリにBT検索ボタンがあります:このボタンをクリックすると、アプリとペアリングされたBluetoothデバイスのリストが表示されます。 HC-02デバイスを選択して車に接続します。 HC-02が接続されると、Bluetoothのステータスが切断から接続に変わります。Bluetoothが接続されているときだけ、車を制御できます。
- iPhone / iPadでHC-02 Bluetoothに接続する場合は、単純にConnectボタンをクリックするだけで、ポップアップリストにHC-02デバイスが表示されます。そのHC-02デバイスをクリックしてBluetoothモジュールをiPhoneに接続します。その後、Connectボタンの名前がDisconnectに変わります。
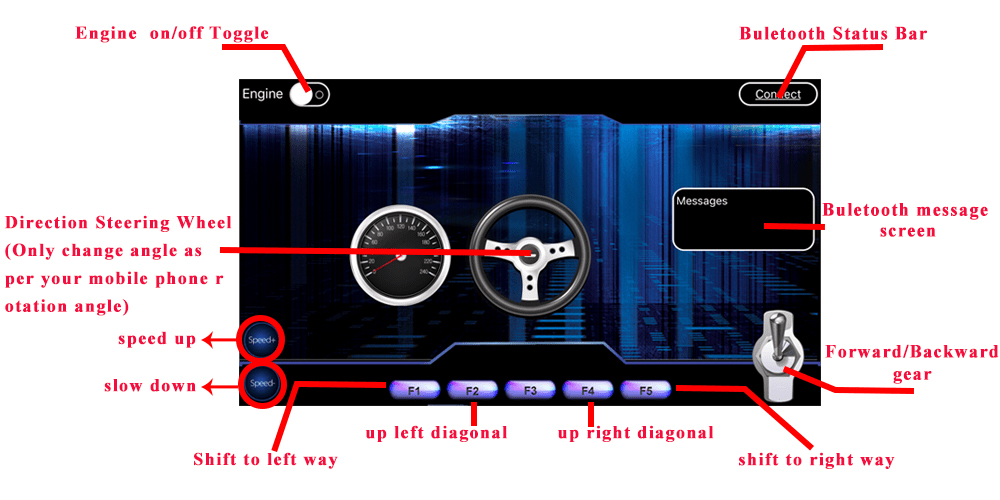
- エンジントグル:エンジントグルがOFF(白)に設定されている場合、車は停止し、アプリ内のすべてのボタンが無効になります。エンジントグルがON(赤)に設定されている場合、車は動き始めます。他のすべての移動制御ボタンが有効になります。
- 前進/後進ギアスイッチ:このギアスイッチは、リアルな車のギアのように車の前進または後進を制御できます。
- F1、F2、F3、F4、F5のカスタマイズボタン:このレッスンでは、停止ボタンであるF3のみを使用します。F3とエンジンOFFボタンの違いは、エンジンOFFボタンをタッチすると、他のすべてのボタンが無効になることです。他のボタンを有効にするには、エンジンボタンを再度切り替える必要があります。一方、F3がクリックされると、車は停止しますが、他のすべてのボタンはまだアクティブです。F1を押すと左に移動し、F2を押すと左上に斜めに移動し、F3を押すと一時停止し、F4を押すと右上に斜めに移動し、F5を押すと右に移動します。
- 方向ステアリングホイール:モバイルフォンの角度を回転させると、ステアリングホイールがモバイルフォンの回転角度に合わせて角度が変わり、車の方向が変わります。たとえば、時計回りにステアリングホイールを回転させると、車は左に移動します。ステアリングと前後のギアは、実際に車を運転しているのと同じように一緒に動作する必要があります。たとえば、車を右側の駐車場に戻したい場合は、ギアをR位置に設定し、ステアを反時計回りに回転させる必要があります。
- Speed +:ロボットカーを加速させます。
- Speed-:ロボットカーを減速させます。

Step 1: 最新のArduino IDEをインストールします(Arduino IDEバージョン1.1.16以降を使用している場合は、このステップをスキップしてください)。 https://www.arduino.cc/en/Main/Software?setlang=en からArduino IDEをダウンロードして、ソフトウェアをインストールします。
Step 2: https://osoyoo.com/driver/mecanum_acrylic_chassis_v2/mc-lesson5.zipをダウンロードし、ダウンロードしたzipファイルmc-lesson5.zipを解凍すると、mc-lesson5.zipというフォルダが表示されます。
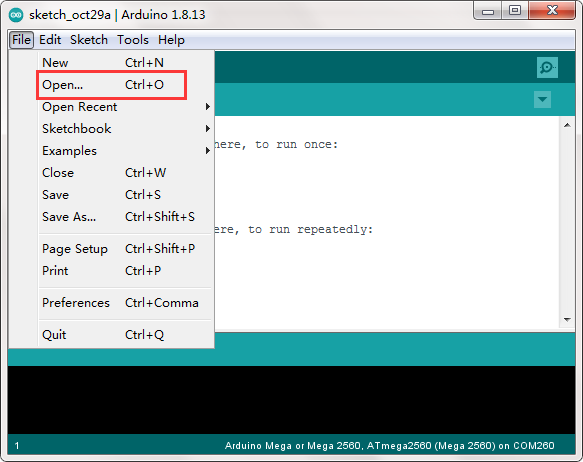
Step 3: USBケーブルを使ってMega2560ボードをPCに接続し、Arduino IDEを開きます。ファイルをクリックし、オープンをクリックして、lesson5フォルダの「lesson5.ino」というコードを選択し、コードをArduinoにロードします。
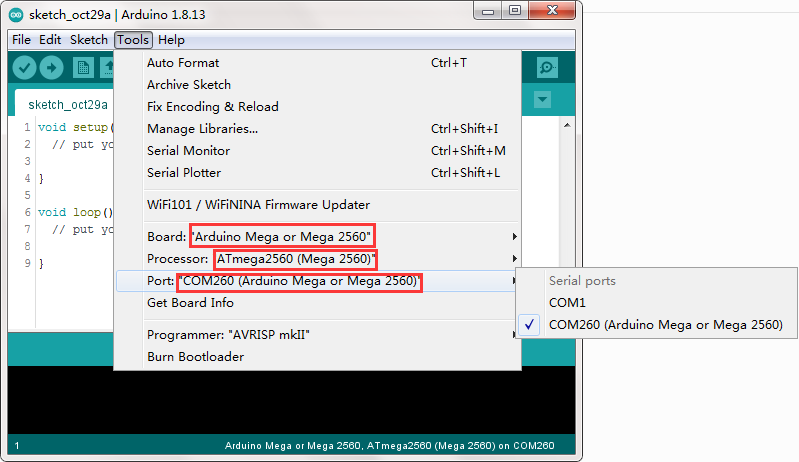
Step 4:プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。
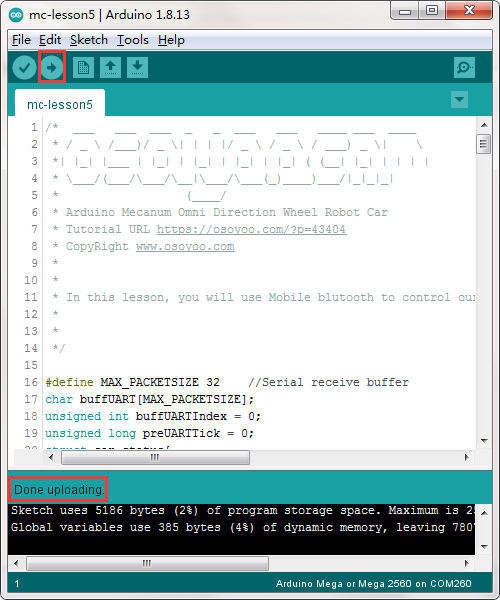

これで、このレッスンのハードウェアとソフトウェアがインストールされました。さあ、車を走らせましょう!
Step 1) ロボットカーを地面に置き、スイッチを入れます。
Step 2) 携帯電話に移動します->設定->Bluetooth設定->Bluetoothデバイスで「HC-02」というBluetoothデバイスを検索し、コード1234でペアリングします。
- Androidデバイスと接続する場合:
Androidデバイスを使用しており、Bluetoothモジュールを携帯電話とペアリングしていない場合は、アプリを開く前にBluetoothモジュールをまずペアリングしてください。携帯電話の設定->Bluetoothで、パスワード1234で呼び出されるBluetoothデバイス「HC02」を見つけ、ペアリングします。Bluetooth HC02デバイスがペアリングされたら、アプリを開きます。 BT検索ボタンをクリックして、アプリをHC02デバイスに接続します。
- iOSデバイスを使用する場合:
iOSデバイスを使用する場合、単純にアプリを開き、接続ボタンをクリックすると、Bluetoothリストが表示され、HC02デバイスを選択できます。
Step 3) OSOYOOイミテーションドライブロボットアプリを開き、BT検索ボタンをクリックして、ペアリングしたBluetoothを検索します
Step 4)エンジントグルをオンにし、スピード+をクリックしてロボットの速度を上げます。 最初はロボットカーが非常に遅いためです。携帯電話の角度を回転させると、車が方向を変えます。
Step 5) ギアボタンをクリックして、前進または後退方向にギアを変更します。
ステップ6)左にシフトするにはF1を、右にシフトするにはF5を、左上斜めに進むにはF2を、右上斜めに進むにはF4を、一時停止するにはF3を押します。

モータースピードチューニングによるパフォーマンスの向上
より良い走行パフォーマンスを得るために、モーターパワー(スピード)値はバッテリーレベルに合わせて適切に調整する必要があります。モーターパワー(スピード)値が高すぎると、車が速すぎて制御が難しくなる可能性があります。モーターパワー(スピード)が低すぎると、車が動かない可能性があります。
モーターパワーの値を調整するには、mecanum-2560-lesson4.inoスケッチファイルの3つの定数行(27、28、29行目)を変更する必要があります。
#define MIN_SPEED 50
#define TURN_SPEED 70
#define SLOW_TURN_SPEED 50
#define BACK_SPEED 60
MIN_SPEEDは、車を起動するのに必要な最小のパワーです。APPエンジントグルが赤に切り替わっても車が動かない場合は、この値を増やす必要があります。エンジンの始動時に車が速すぎる場合は、この値を減らす必要があります。
TURN_SPEEDとSLOW_TURN_SPEEDの値は、車の旋回速度を決定します。車が旋回しすぎる場合は、これらの値を減らす必要があります。旋回が遅すぎる場合や旋回しない場合は、これらの値を増やす必要があります。常に、SLOW_TURN_SPEEDの値をTURN_SPEEDの値よりも20〜30低くするようにしてください。
BACK_SPEEDの値は、逆走速度を決定します。
バッテリーが低くなってくると、これらの3つの定数の値を増やす必要がある場合があります。これらの値に対して10ずつ増減させ、どの値が最良のトラッキングパフォーマンスを発揮するかを比較してください。











