


| OSOYOOから購入 |
Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
Amazon日本~ |
 |
 |
 |
 |
 |
 |
 |
 |

このレッスンでは、Arduino用のIDEというプログラミングツールを使って、WIFI APPでロボットカーを制御します。このレッスンでは、スマホのAPPで車を制御して、前進、後退、右折、左折を行い、フィンガーサーボを開いて、物をキャッチしたり、物を降ろしたりします。


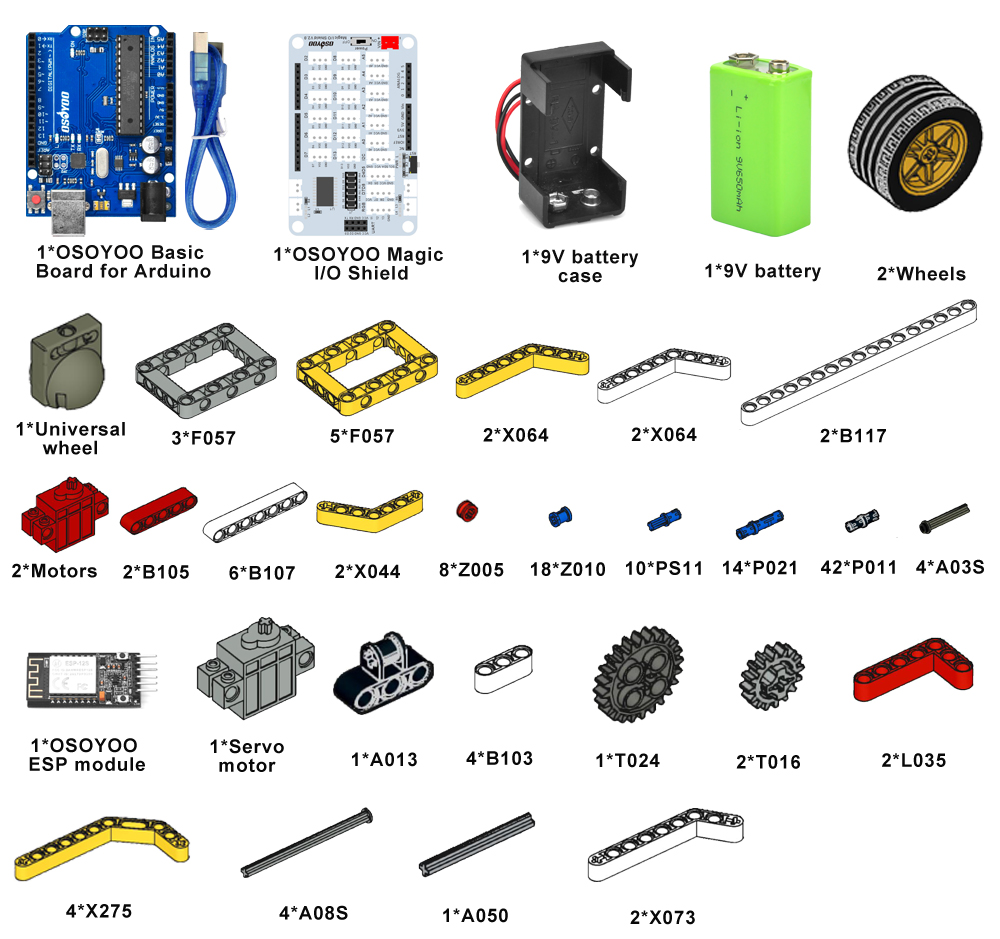
このプロジェクトを完成させるために、以下の部品を準備してください。
注意事項
1.ビルディングブロックの色は、実際の製品に従うものとし、使用には影響しません。
2. すべてのosoyoo製品はarduinoと完全に互換性のあるサードパーティボードです。

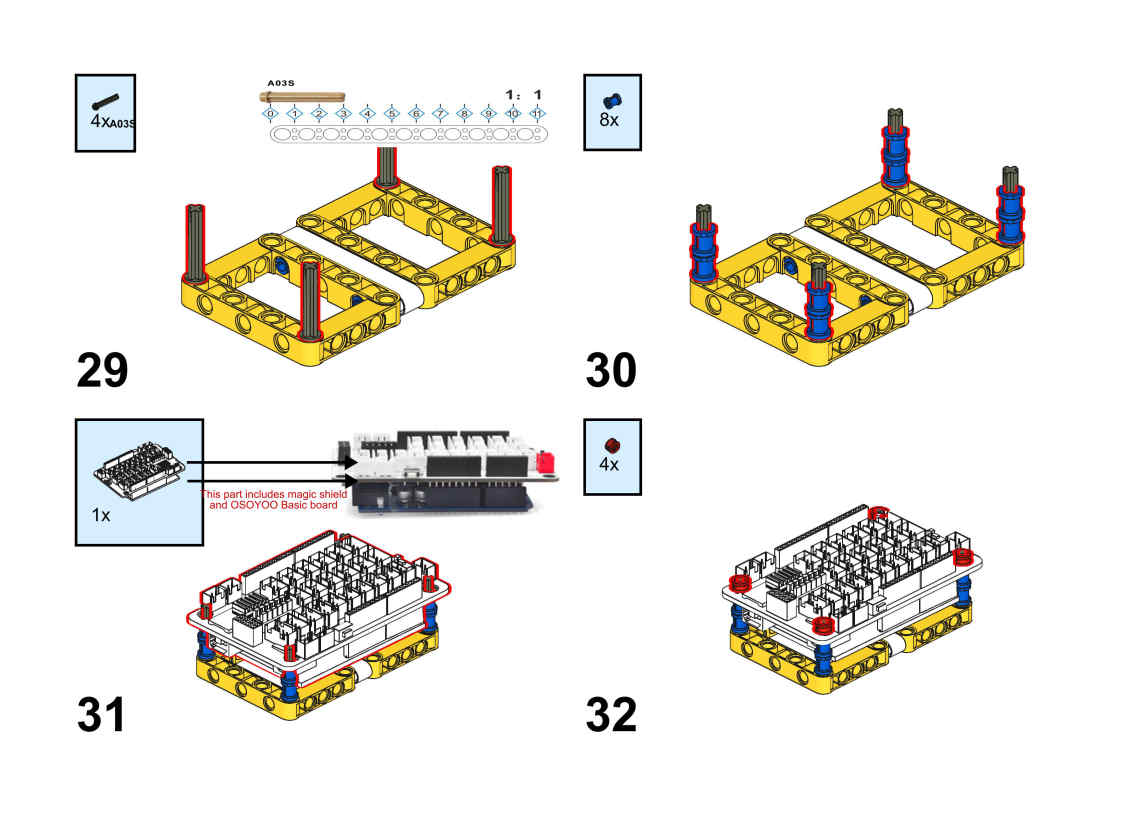
ブロックを使ってロボットを組み立てる前に、OSOYOO Magic I/Oシールドの下にOSOYOO Arduino用ベーシックボードを以下のように取り付けてください(注意:I/Oシールドのピンをベーシックボードのポートに合わせてから、シールドをボードにしっかりと押し付けてください)。

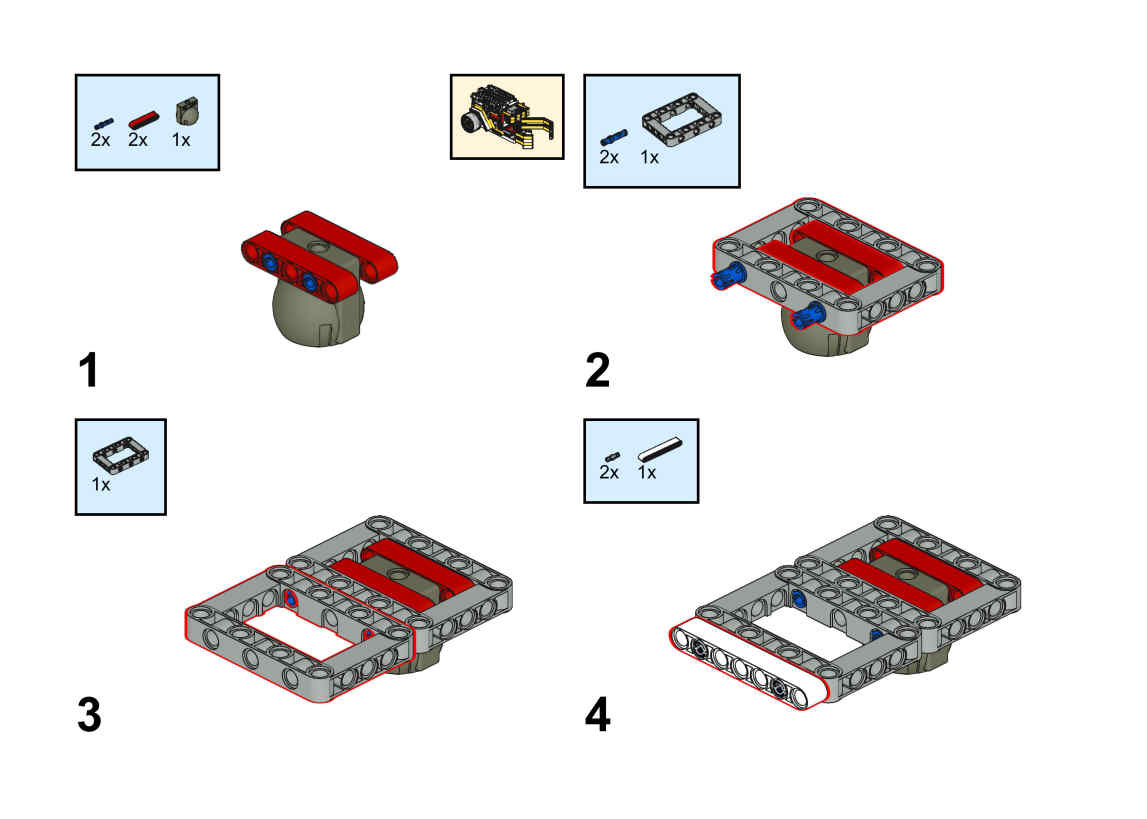
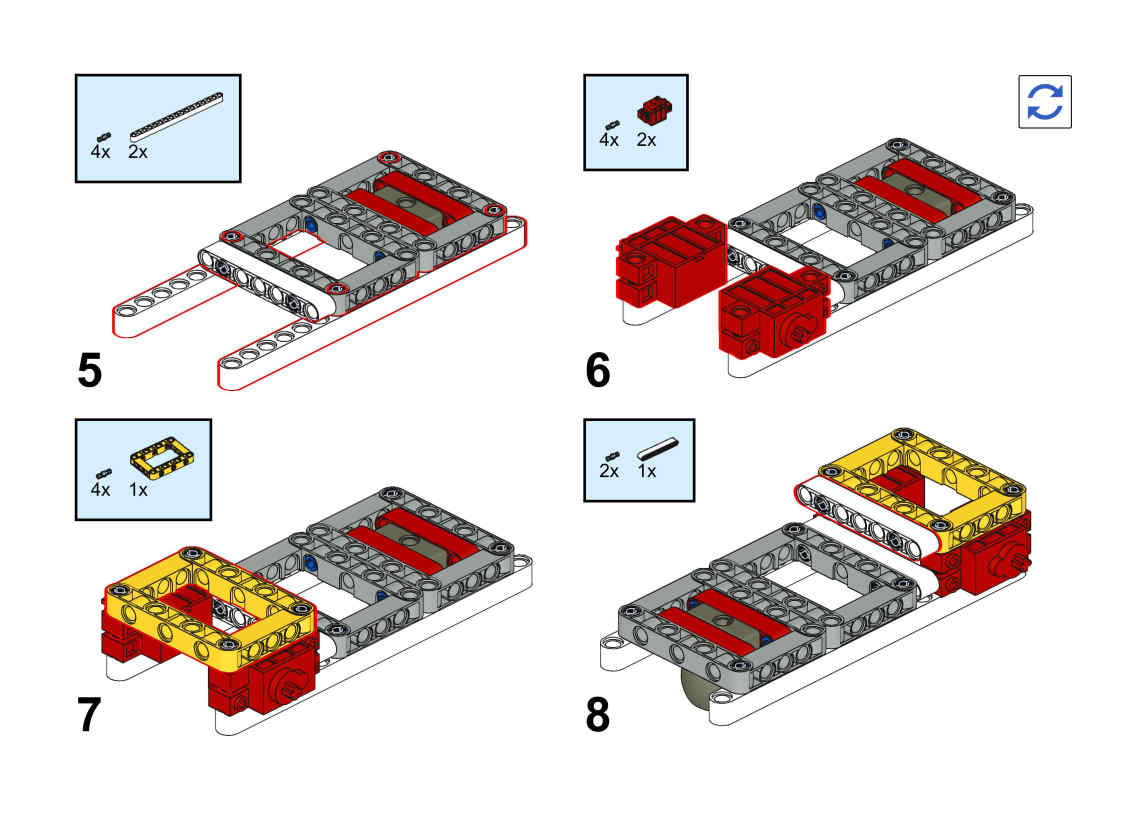
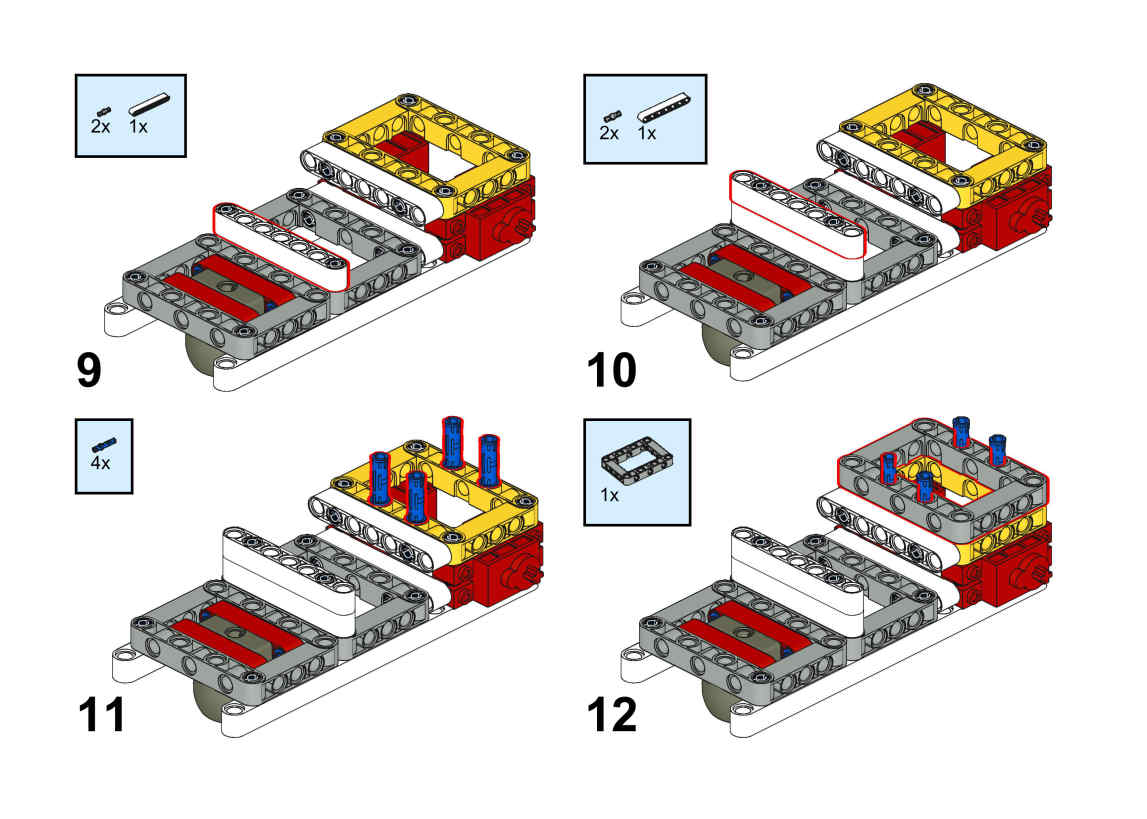
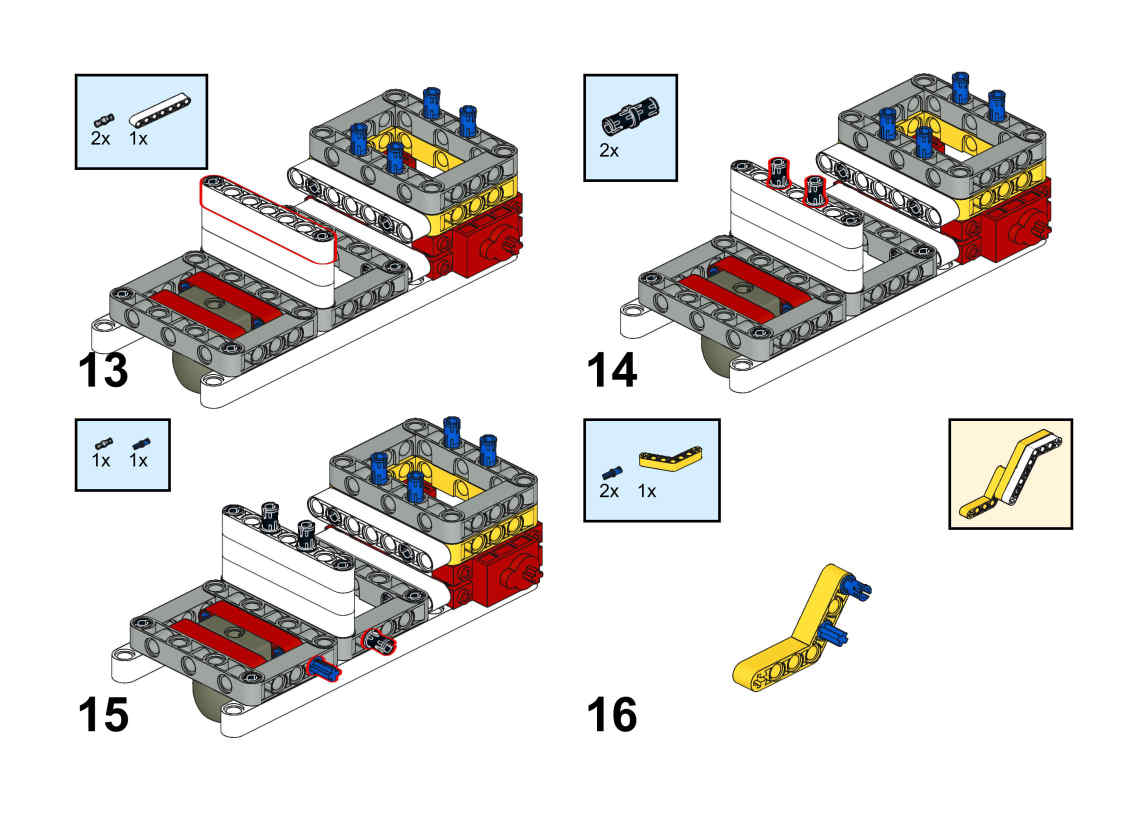
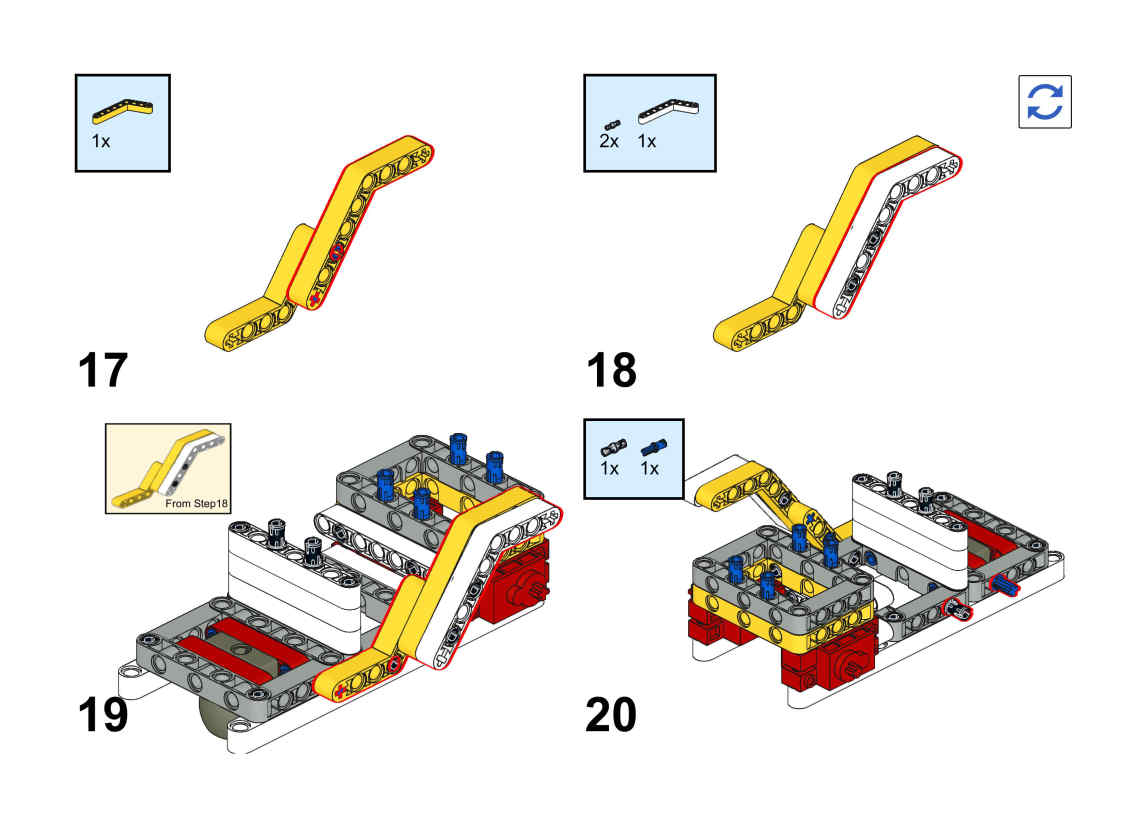
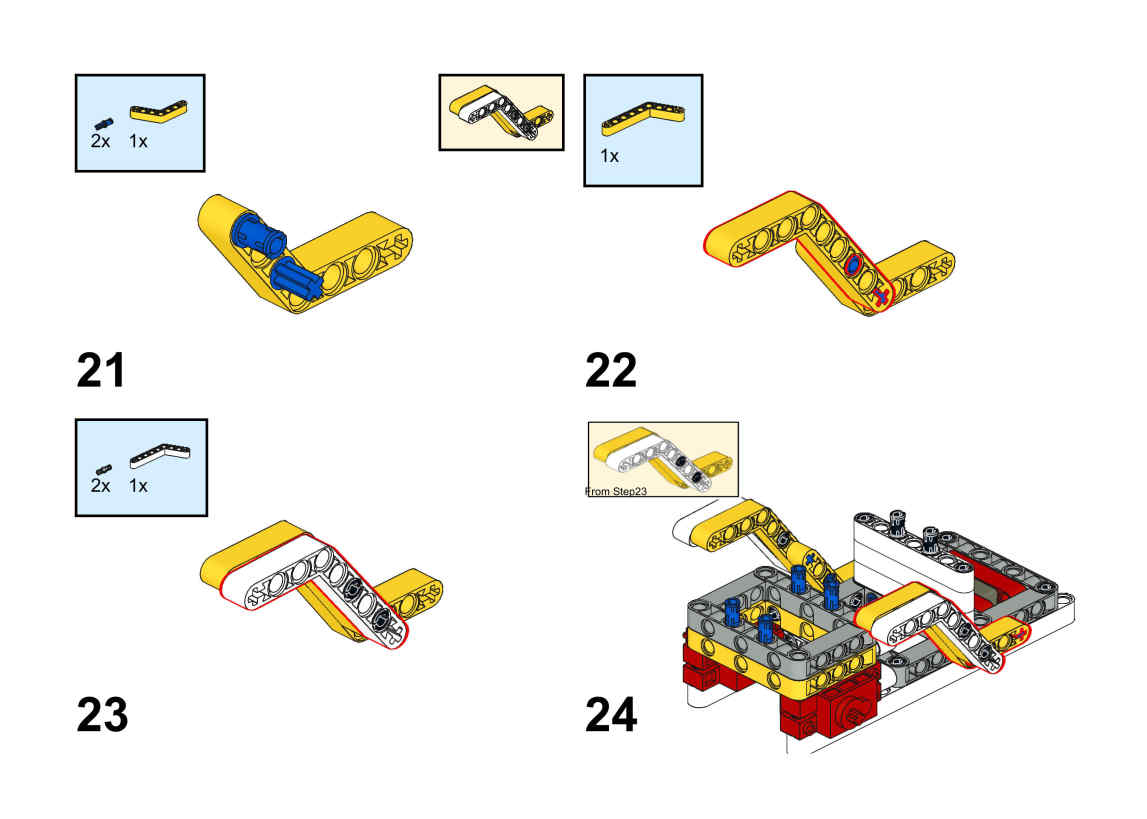
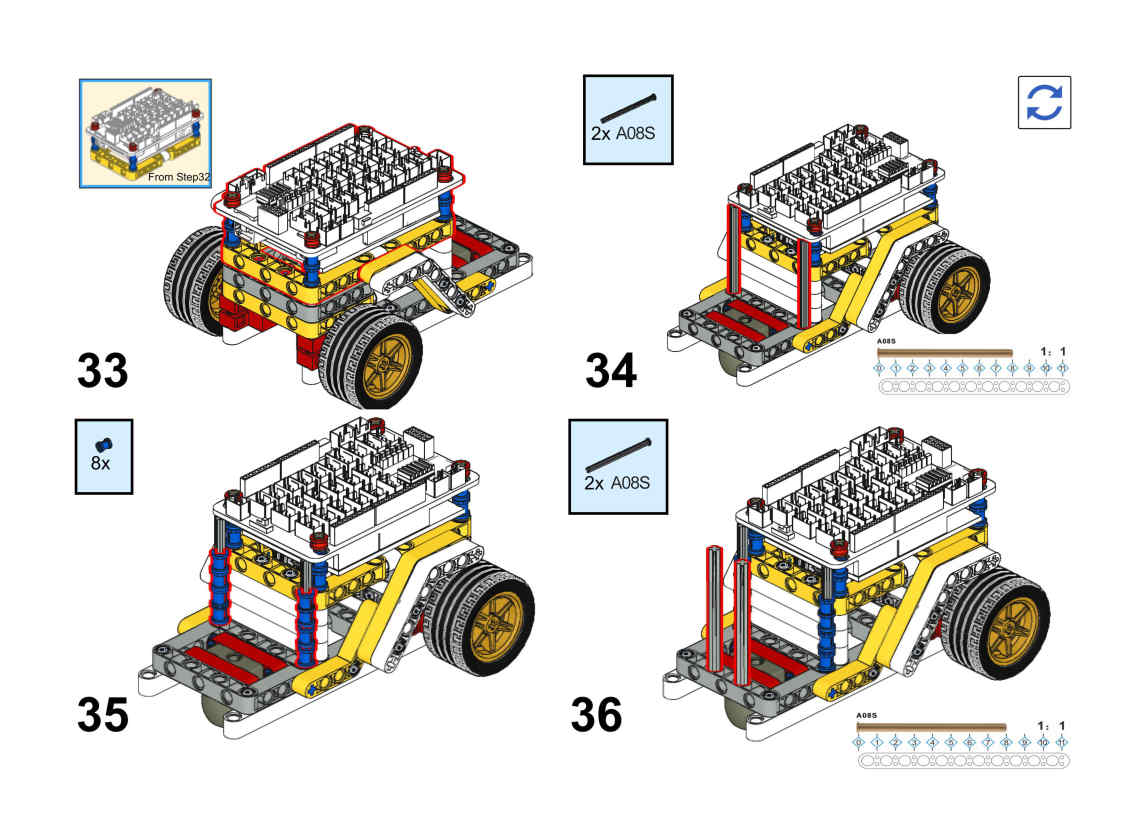
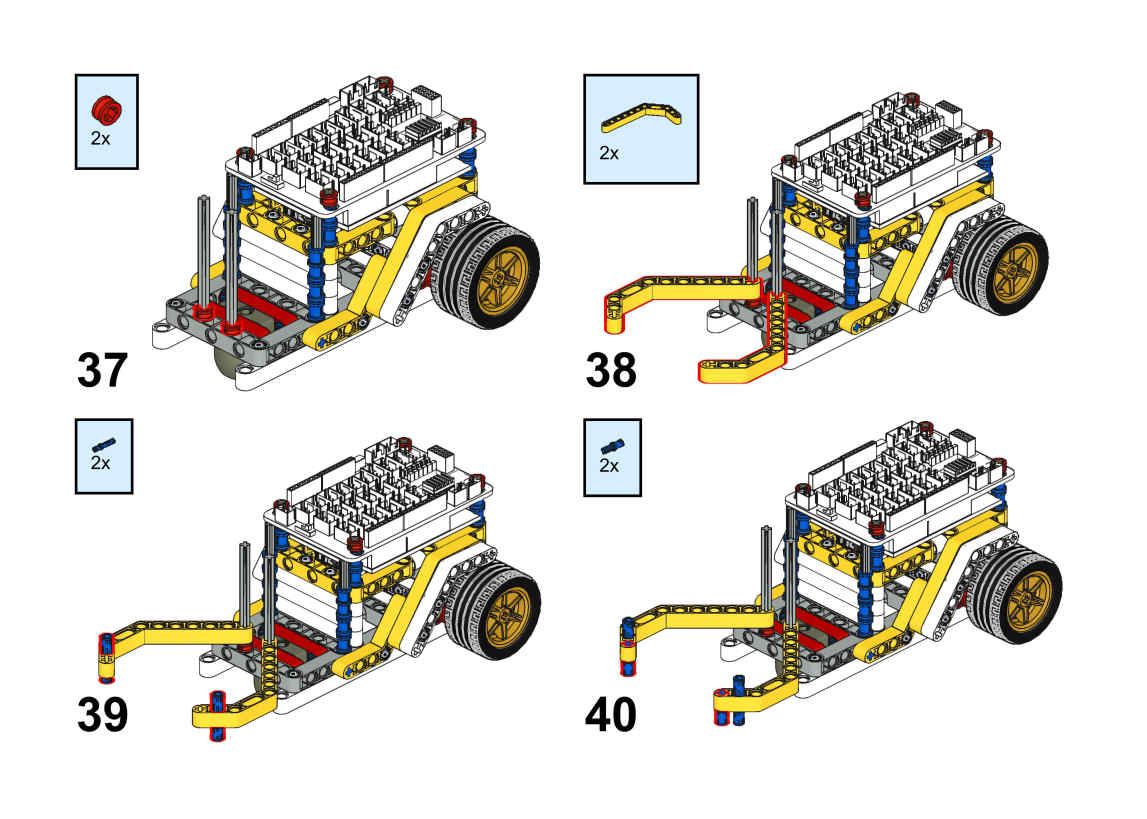
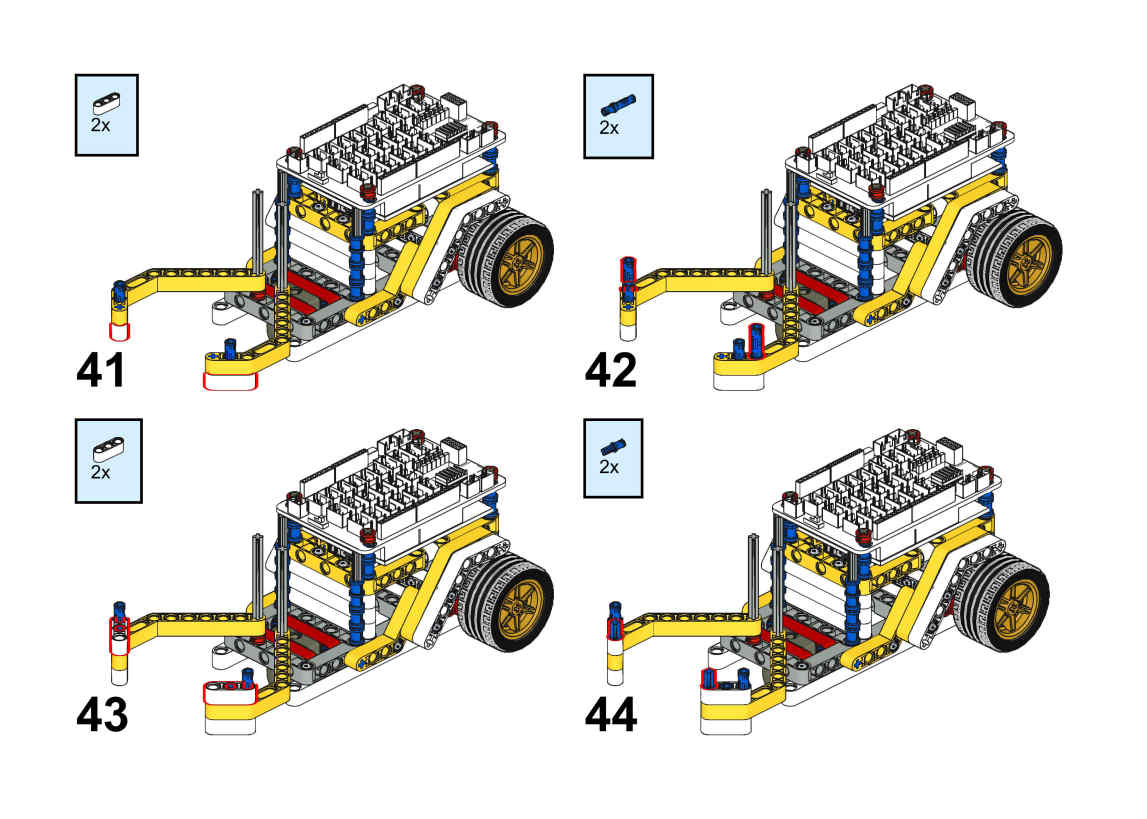
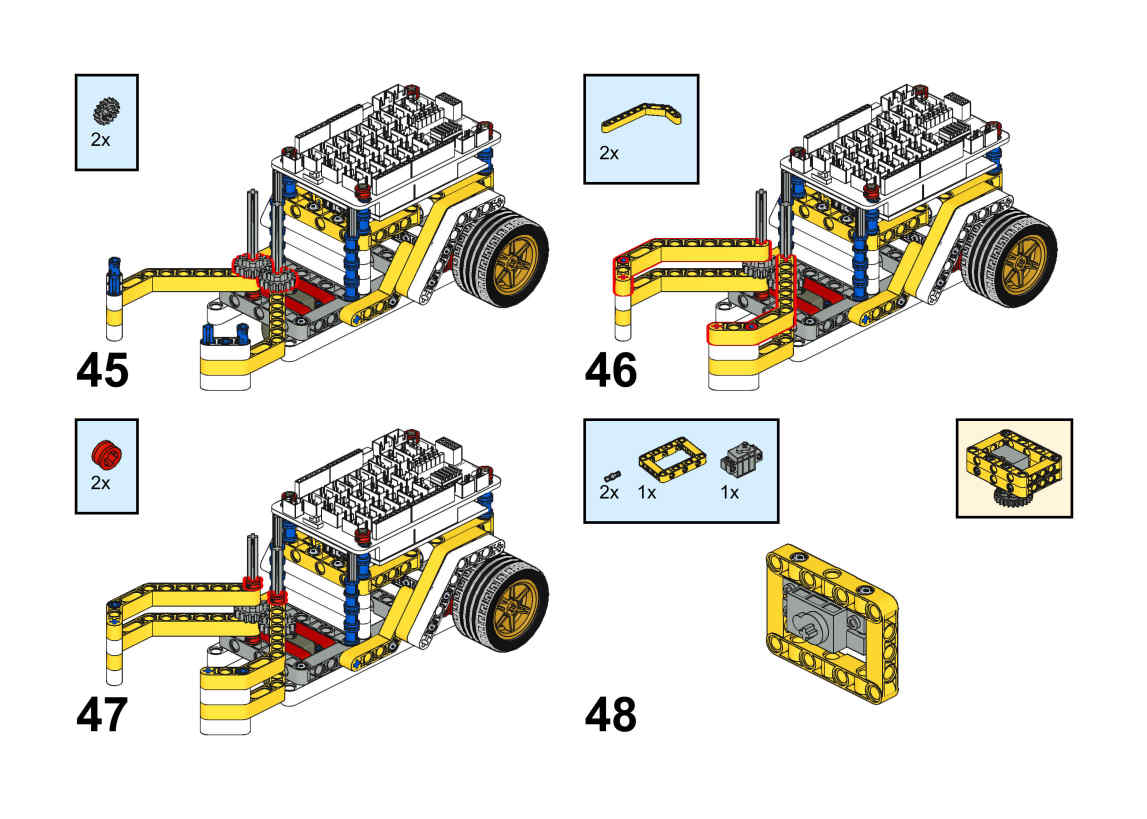
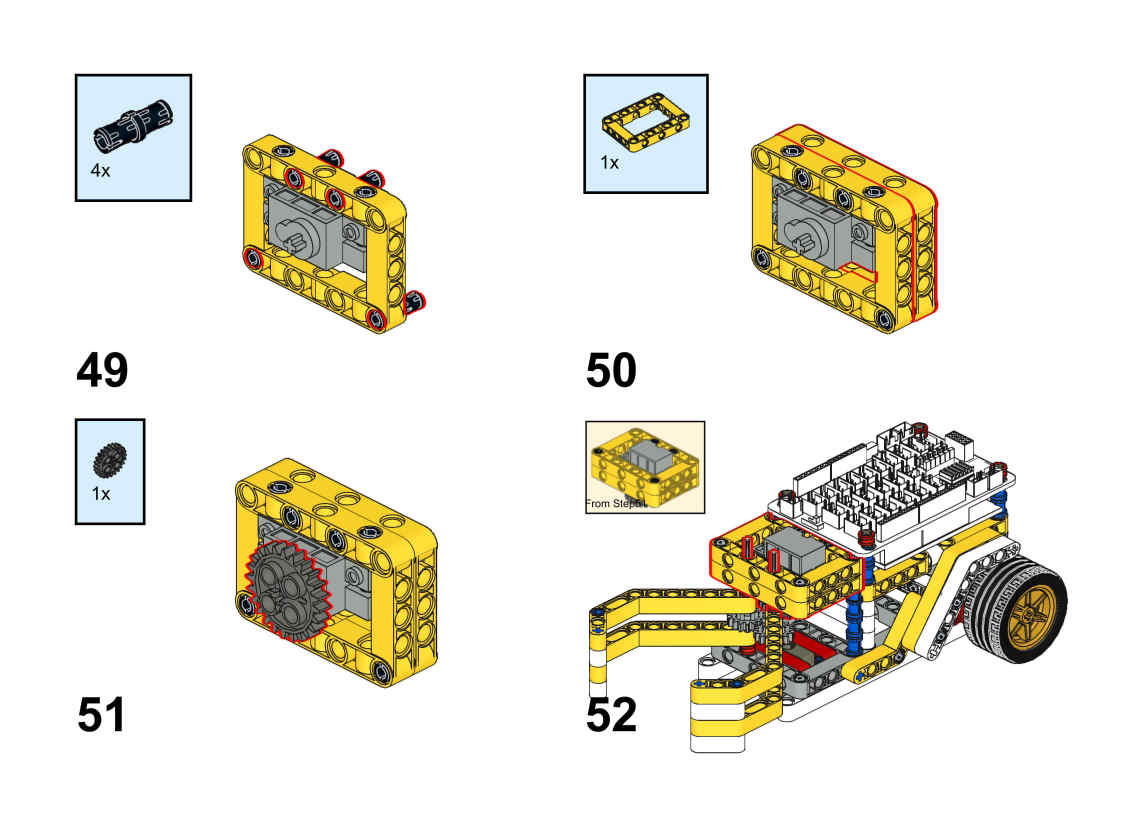
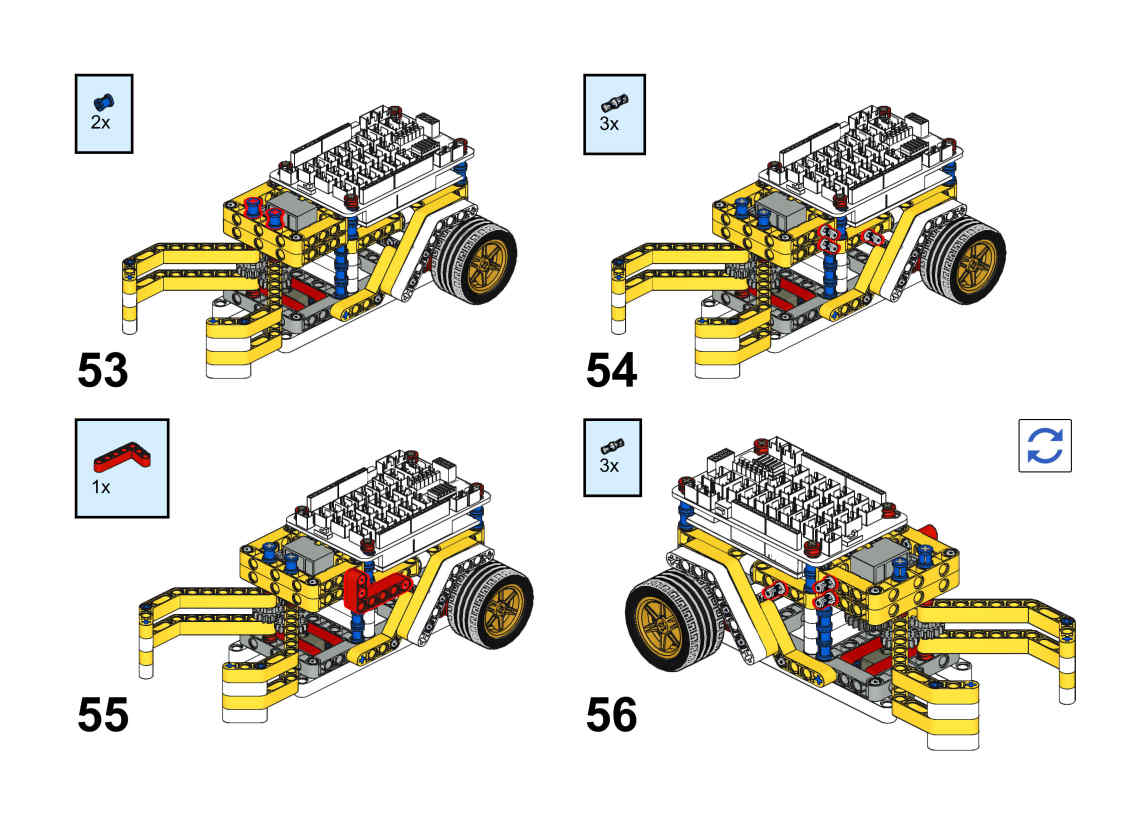
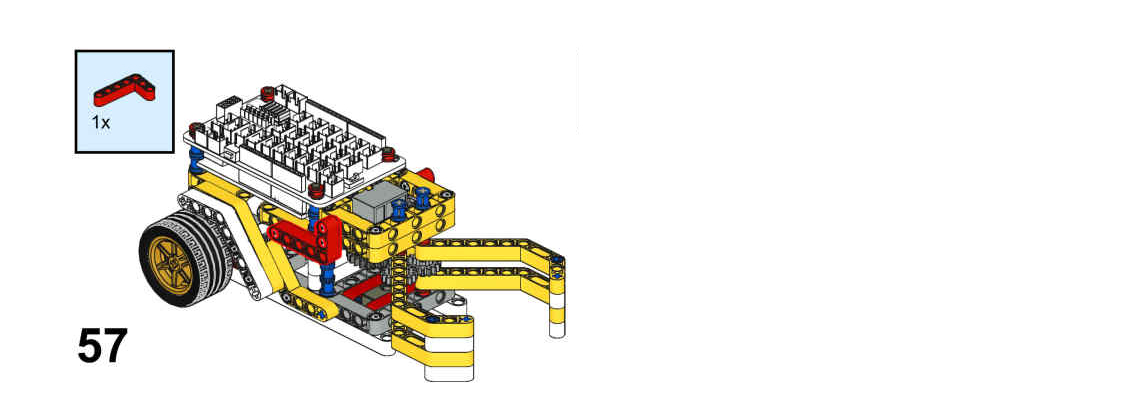
このロボットカーを組み立てるには、組み立て手順に従ってください。明確な組み立て手順のPDFを入手したい場合は、https://osoyoo.com/picture/Building_Robot_Car/lesson6/lesson6.pdf からダウンロードしてください。
注意: レッスン1でロボットカーを組み立てた方 は、このPDFのステップ35まで読み飛ばしてください。
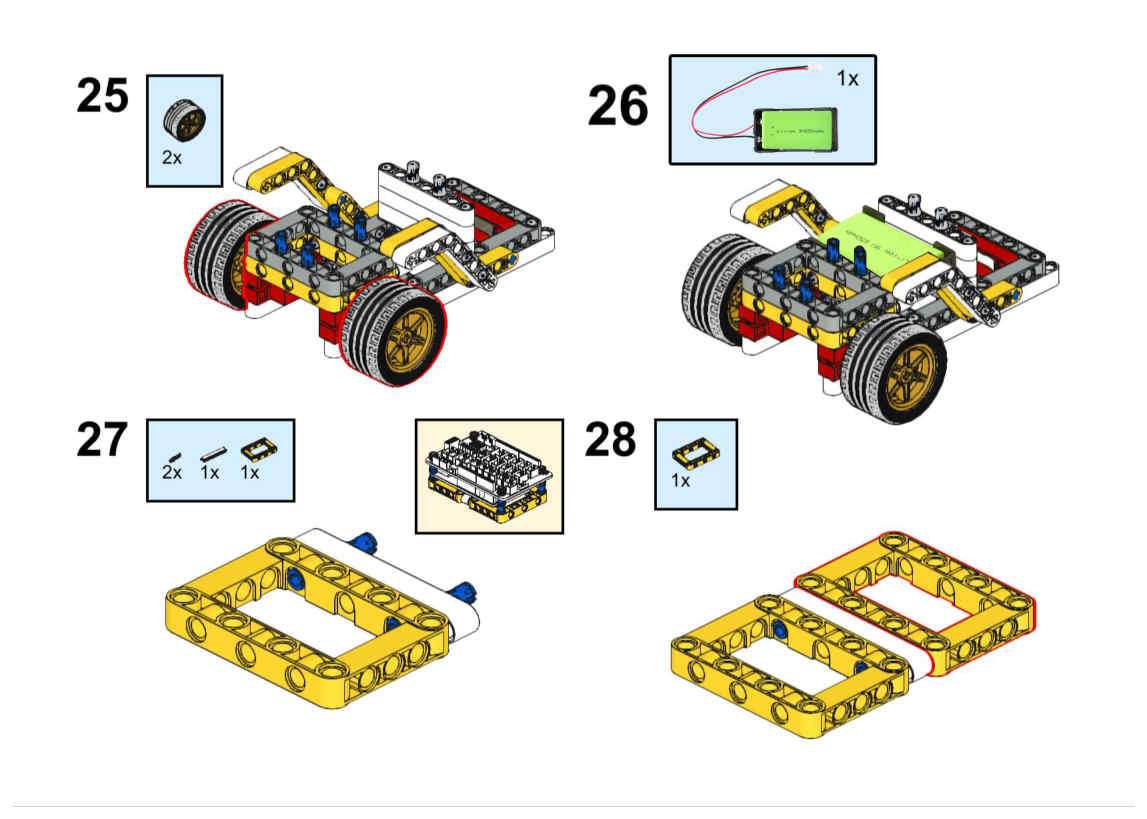

lesson1と同じようにモーターと9V電池ケースを接続してください。
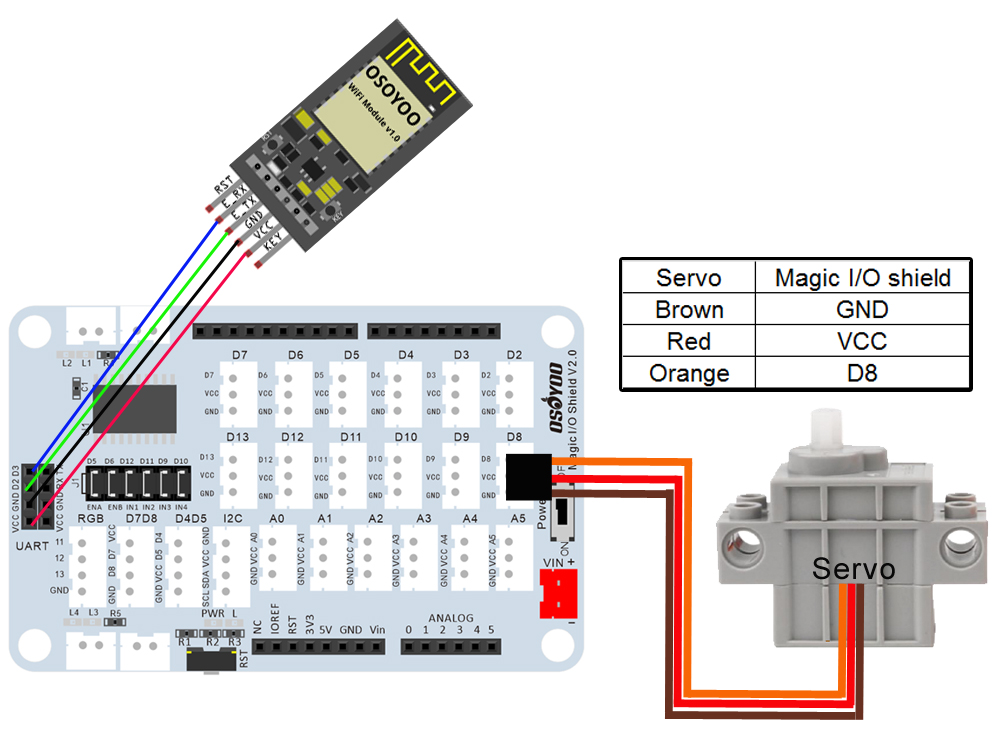
次にOSOYOO WIFIモジュールの真ん中の4ピンをMagic I/OシールドのVCC/GDN/D2/D3スロットに接続し、サーボモーターをD8ポートに接続します(注意:ENA/ENB/IN1/IN2/IN3/IN4には6つのジャンパーキャップがあります)。

注意:このレッスンではArduino IDEをプログラミングツールとして使用します。
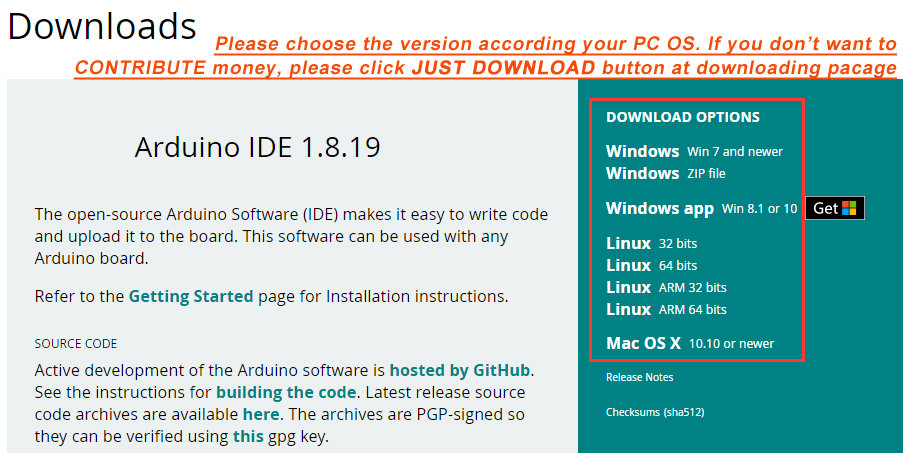
Step 1: Arduino IDEをインストールします。https://www.arduino.cc/en/Main/Software?setlang=en からArduino IDEをダウンロードし、ソフトウェアをインストールします。すでにArduino IDEをインストールしている場合は、このステップは飛ばしてください。
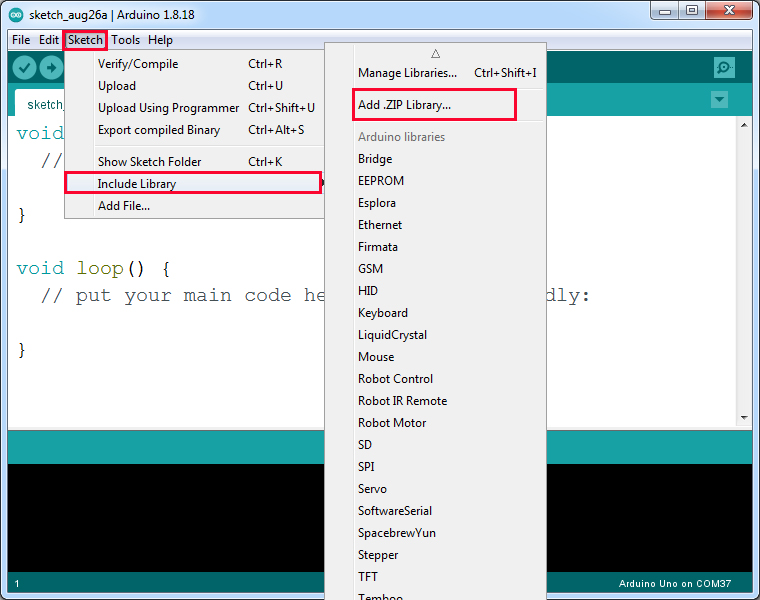
Step 2: WifiEsp-masterライブラリをIDEにインストールします。 https://osoyoo.com/driver/WiFiEsp-master.zipから WifiEsp-master ライブラリをダウンロードし、IDE にインポートします(IDE を開く-> Sketch をクリック-> Include Library をクリック-> Add .Zip Library)。
Step 3: IDEにOsoyooIOTライブラリをインストールする (すでにOsoyooIOTライブラリをインストールしている場合は、このステップは飛ばしてください)
OsoyooIOTライブラリをhttps://osoyoo.com/driver/wifi-iot/OsoyooIOT.zipからダウンロードし、IDEにインポートします(IDEを開く-> Sketch->ライブラリをインクルード-> .Zipライブラリを追加)。
Step 4: https://osoyoo.com/picture/Building_Robot_Car/lesson6/robot-arm-car.zipからサンプルコードをダウンロードし、ダウンロードしたzipファイルrobot-arm-car.zipを解凍します。
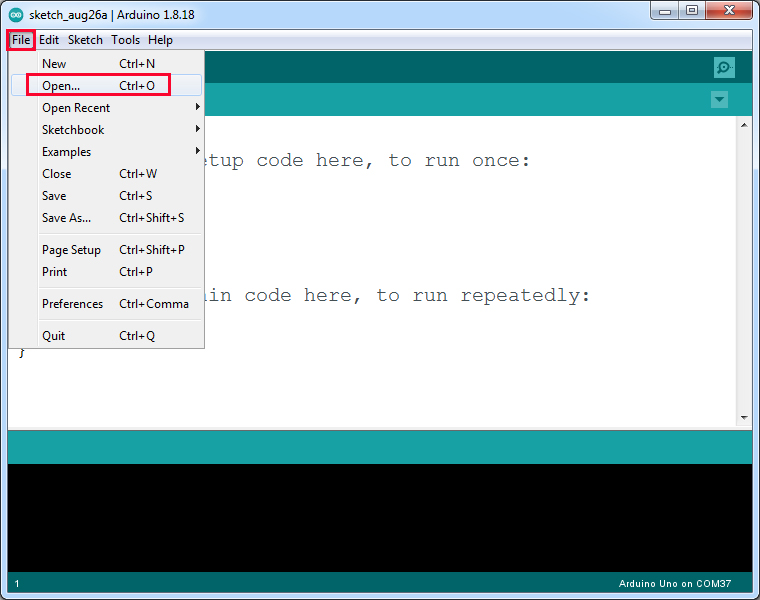
Step 5: OSOYOO basic board for ArduinoをUSBケーブルでPCに接続し、Arduino IDEを開く->ファイルをクリック->開くをクリック->robot-arm-carフォルダ内のコード “robot-arm-car.ino “を選択し、コードをarduinoにロードする。(注意: ロボットをパソコンやノートパソコンにUSBケーブルで接続するときは、電源を切ってください。)
Step 6: コード35行目と36行目をルーターwifiのSSID名とパスワードに変更する必要があります:
char ssid[] = “***”; // replace *** with your router wifi SSID (name)
char pass[] = “***”; // replace *** with your router wifi SSID (password)
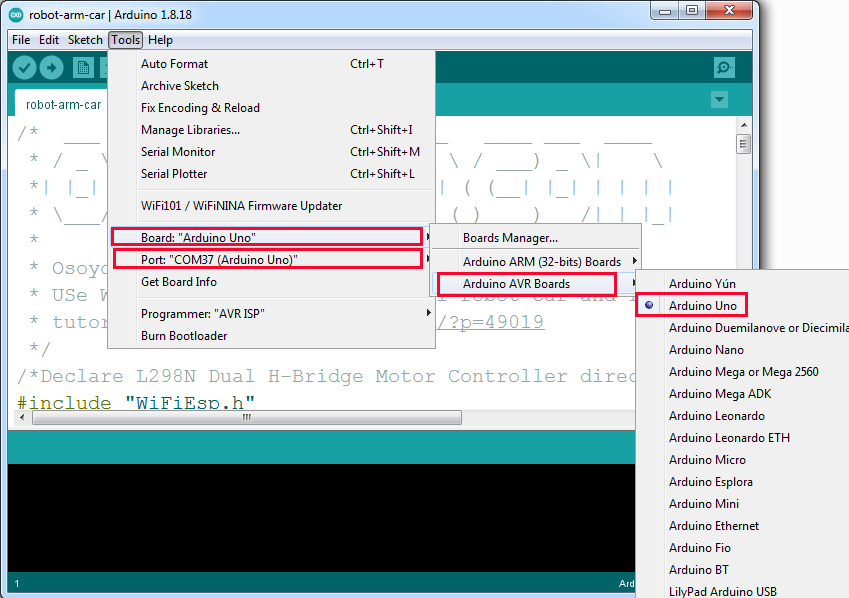
Step 7: プロジェクトに対応するボードとポートを選択し、スケッチをボードにアップロードします。
Step 8: IDEの右上にあるシリアルモニターウィンドウをクリックすると、次のような結果が表示されます。
(注:PCとロボットは同じLANネットワークに接続されています:)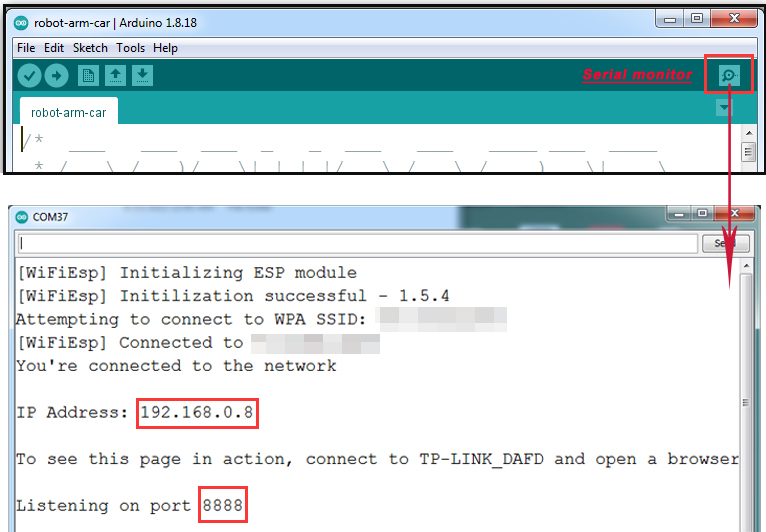
TIPS:
もし車の速度が遅かったり速かったりする場合は、コードを開いて31行目から33行目の値を以下のように変更してください:
#define FAST_SPEED 50
#define MID_SPEED 50
#define SPEED 50
)
アプリのインストールと設定
Step 1) OSOYOO Iot udp APPをアップルストア(iPhone/iPad)またはグーグルプレイストア(アンドロイドデバイス)から検索してダウンロードする。(ご注意:Google Playでこのアプリを見つけられない場合、以下のリンクから直接にアプリをダウンロードできます:https://osoyoo.com/driver/udp-app.apk )
Step 2): OSOYOO Iot udp APPを携帯電話にインストールし、携帯電話がArduino用ロボットカーと同じLANネットワークに接続されていることを確認します。
Step 3): APPでIPアドレスを設定する
1)アプリを開き、右上の設定ボタンをクリックします。
2)デフォルトIP 192.168.1.255をシリアルモニタウィンドウで取得したIPアドレス(私たちのロボットは192.168.0.8です)に置き換えます。
3)デフォルトのポート番号8888を変更しないでください。
4)Saveボタンをクリックして変更を保存します。
5)戻る矢印をクリックしてAPPフロントUIに戻る
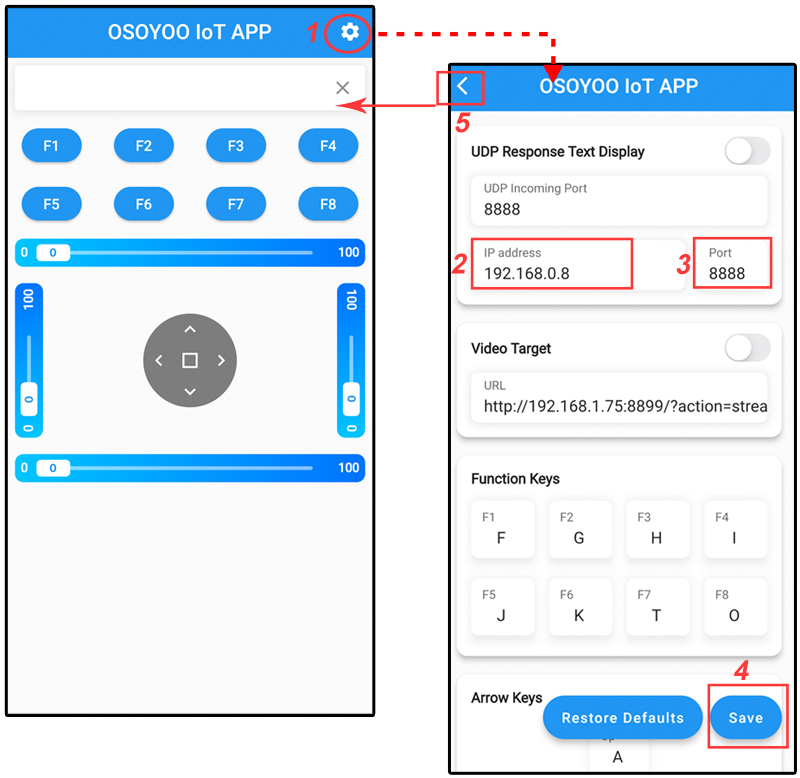
矢印キーで車の動きをコントロールできます。APPボタン操作
| ▲ |
前進 |
| ▼ |
後方に移動 |
| ◄ |
左折 |
| ► |
右折 |
| [] |
停止 |
| F1 |
指を開く |
| F2 |
指を閉じる |


































































