


I.目的
II.部品と装置
III.ハードウェアのインストール
IV.回路接続
V.ソフトウェアのインストール
VI.遊び方

メカナムホイールロボットカー完全セット
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |
上記のロボットカーはArduinoで制御しています。 ラズベリーパイボードがあれば、実はロボットカーもラズベリーパイで制御できます。 次のリンクにアクセスして、raspberry pi を使用した基本的な動きを学習できます。
リンク – https://osoyoo.com/?p=31428

このレッスンでは、モバイルを使用してロボットカーを制御し、運転を模倣します。 これは模擬運転であるため、APP で仮想ハンドルとギアを使用して、実際の車の対応物を模倣します。
 OSOYOO Mecanum Wheels ロボットカーシャーシ x 1 (左輪×2/右輪×2、モーター×4)
OSOYOO Mecanum Wheels ロボットカーシャーシ x 1 (左輪×2/右輪×2、モーター×4)
OSOYOO Arduinoと完全互換の Mega2560ボード x 1
OSOYOO WiFiシールド×1
OSOYOO モデル Y モータードライバー x 1
OSOYOO HC02 ブルートゥース モジュール
OSOYOO MG90サーボモーター×1
OSOYOO 超音波センサーモジュール x1
OSOYOO 超音波マウントホルダー
OSOYOO バッテリーボックス×1
OSOYOO 3pin メス – メス ジャンパー線 x1
OSOYOO 6pin オス-メス ジャンパー線 x2
OSOYOO 2 ピン XH.25 メス – メス x1
OSOYOO 10 ピン ジャンパー線 オス – メス x118650 電池 (3.7V) x 2

このレッスンに進む前に、レッスン 1 (車の組み立て) を完了しておく必要があります。何も変更する必要はありません。ハードウェアの配線接続はそのままにしておいてください。

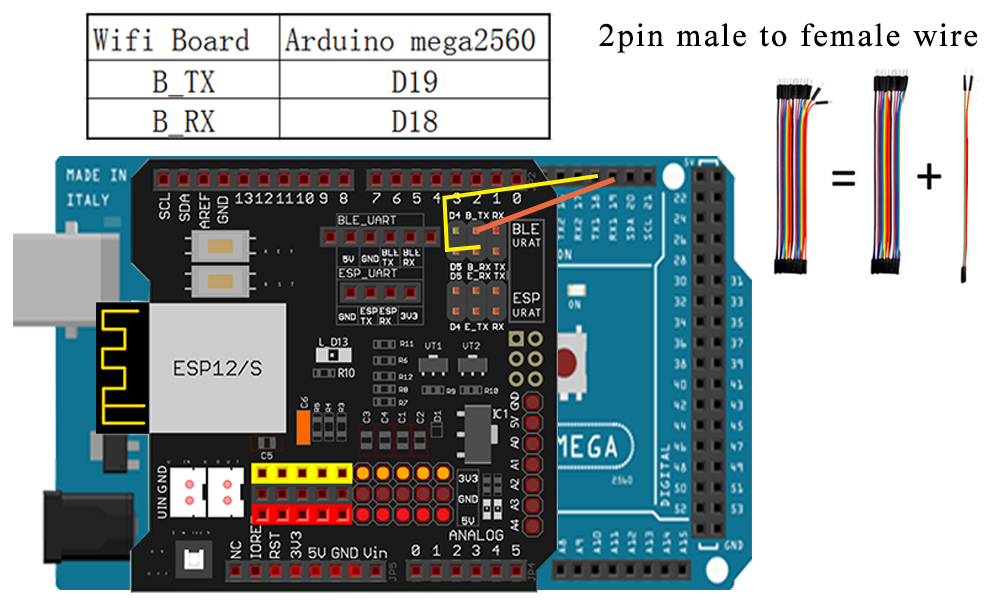
ステップ1: B_TX と B_RX を D19 と D18 に接続します。
注: 10 個のジャンパー ワイヤー バンドルから 2 個のオス – メス ジャンパー ワイヤーを分割する必要があります。 バンドルのどの色でも問題ありません。 残りの 8 本のワイヤは、潜在的な断線または損傷したワイヤのスペアパーツとして使用されます。
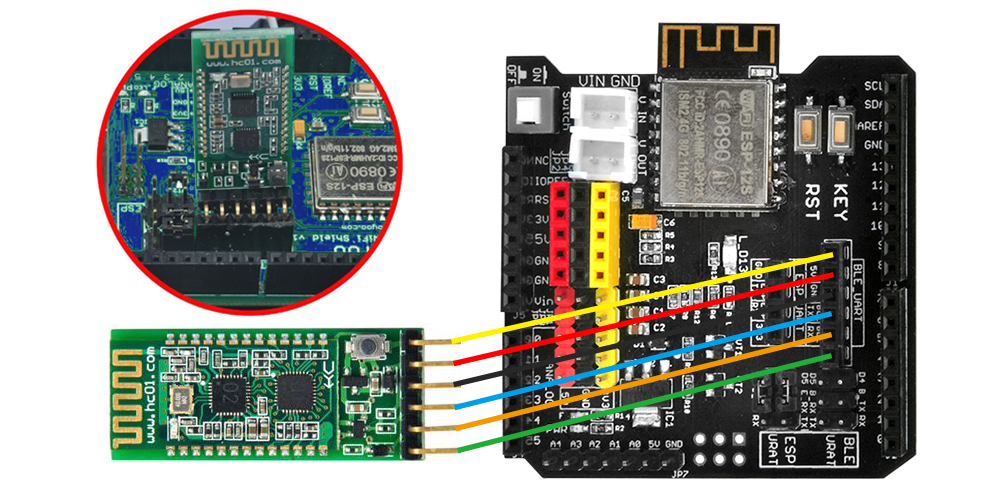
ステップ 2: ブルートゥース モジュールは、OSOYOO WiFi ボードのブルートゥース 6 ピン スロットに挿入する必要があります。

ステップ1:最新のArduino IDEをインストールします(Arduino IDEバージョン1.1.16以降を既に持っている場合は、このステップをスキップしてください)。Arduino IDEはかhttps://www.arduino.cc/en/Main/Software?setlang=en らダウンロードしてください。
ステップ2:https://osoyoo.com/driver/mecanum_metal_chassis_m2/m2-lesson4.zip をダウンロードし、ダウンロードしたzipファイルを解凍すると、m2-lesson4というフォルダが表示されます。
ステップ 3: Mega2560 ボードを PC に USB ケーブルで接続し、Arduino IDE を開きます -> ファイルをクリックします -> [開く] をクリックします -> m2-lesson4 フォルダ内のコード「m2-lesson4.ino」を選択し、コードを arduino にロードします。

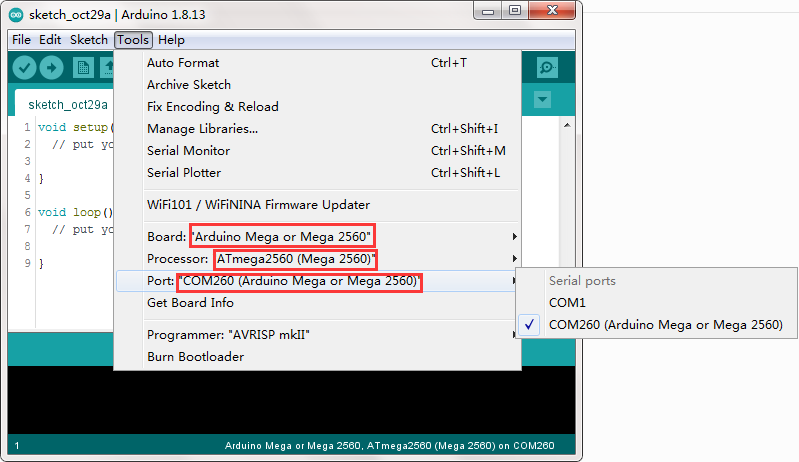
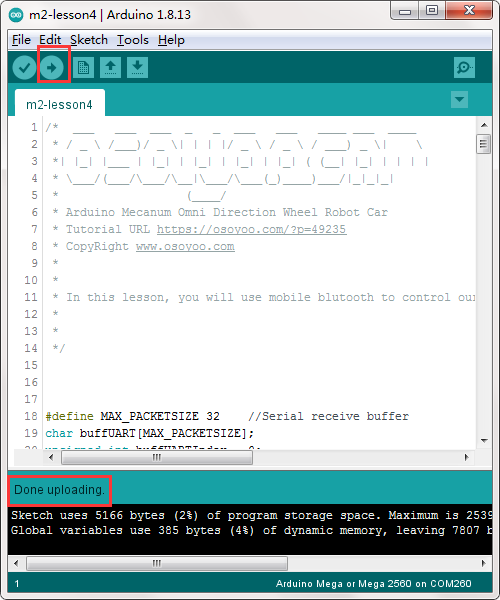
ステップ4:プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードしてください。
モバイル アプリ: Google Play または Apple APP ストアに移動し、アプリ名「OSOYOO 模倣運転」を検索し、次のようにアプリをダウンロードして、スマートフォンにインストールします。
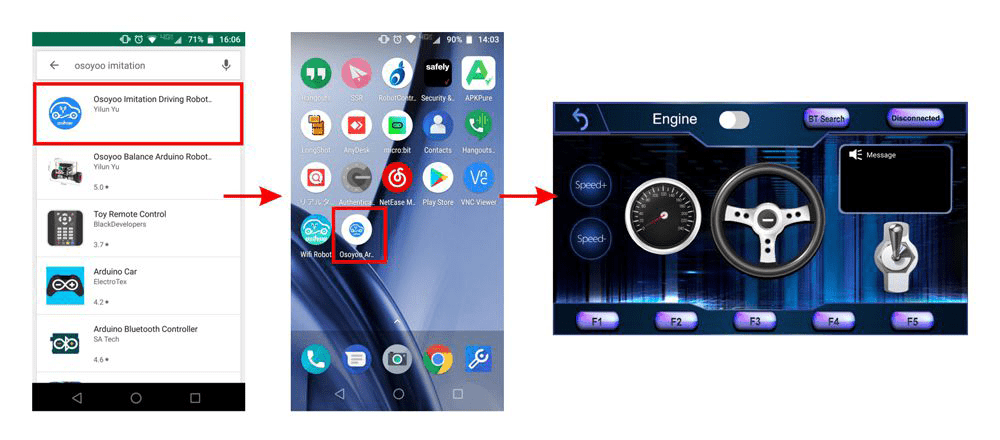
- AndroidスマートフォンでHC-02 Bluetoothを接続してください。Androidアプリには「BT検索」ボタンがあります。このボタンをクリックすると、アプリにペアリングされたBluetoothデバイスリストが表示されます。車を接続するために、HC-02デバイスを選択してください。HC-02が接続されると、Bluetoothのステータスが「切断」から「接続済み」に変わります。Bluetoothが接続されている場合にのみ、車を操作できます。
- iPhone/iPadでHC-02 Bluetoothを接続するには、単純に「接続」ボタンをクリックするだけで、ポップアップリストにHC-02デバイスが表示されます。そのHC-02デバイスをクリックして、BluetoothモジュールをiPhoneに接続してください。そうすると、「接続」ボタンの名前が「切断」に変わります。
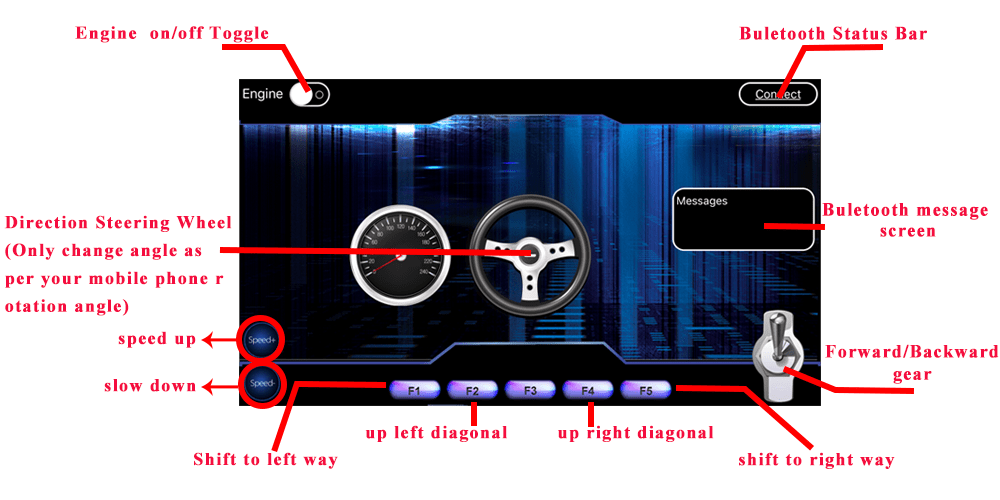
ディスプレイのインタフェース

ロボットの電源をオンにし、アプリを開きます。
(1) アプリをHC-02 Bluetoothモジュールに接続します。
- Androidデバイスと接続する:
Androidデバイスを使用していて、Bluetoothモジュールを携帯電話にペアリングしていない場合は、アプリを開く前にBluetoothモジュールをまずペアリングしてください。携帯電話の設定-> Bluetoothで、パスワード1234でHC02というBluetoothデバイスを検索し、ペアリングしてください。BluetoothのHC02デバイスがペアリングされたら、アプリを開きます。BT Searchボタンをクリックして、アプリをHC02デバイスに接続してください。
- iOSデバイスと接続する:
If you use iOS device, simply open the APP, click Connect button, you will see a Bluetooth list, select the HC02 device .
2)エンジンスイッチをクリックして、車を始動/停止します。
3) Speed +/- ボタンをクリックして速度を加速または減速します。
4) 携帯電話を回転させて方向を変えます (携帯電話を回転させている間、ハンドルが回転します)。
5) 歯車ボタンをクリックして、歯車を前方または後方に変更します。
6) F1 を押して左方向にシフトし、F5 を押して右方向にシフトし、F3 を左斜め上に、F4 を右斜め上に押します。
 より良いパフォーマンスのためのモータースピードチューニング
より良いパフォーマンスのためのモータースピードチューニング
より良い走行性能結果を得るには、バッテリーレベルに応じてモーター出力 (速度) 値を適切に調整する必要があります。 モーター出力(速度)の値が高すぎると、車が速すぎて暴走しやすくなります。 モーターの出力(速度)が低すぎると、車が動かなくなることさえあります。
モーター出力値を調整するには、m2-lesson4 スケッチ ファイルの 3 つの定数行 24、25、26、27、28 を変更する必要があります。
#define MAX_SPEED 150
#define MIN_SPEED 70
#define TURN_SPEED 120
#define SLOW_TURN_SPEED 80
#define BACK_SPEED 90
MIN_SPEED は、車を始動するために必要な最小電力です。 APP エンジンのトグルが赤に切り替えられても車が動かない場合は、この値を増やす必要があります。エンジン始動時に車が速すぎる場合は、この値を減らす必要があります。
TURN_SPEED 、 SLOW_TURN_SPEED 値は、車の回転速度を決定します。 車の回転が速すぎる場合は、これらの 2 つの値を減らす必要があります。回転が遅すぎるか、または曲がらない場合は、これらの 2 つの値を増やします。 SLOW_TURN_SPEED は必ず TURN_SPEED の値より 20 ~ 40 程度低くしてください。
BACK_SPEED 値は、後進速度を決定します。
バッテリーの残量が少なくなった後、これら 3 つの定数の値を増やす必要がある場合があります。 これらの値のたびに 10 を徐々に増減して、どの値が最高のトラッキング パフォーマンスを持っているかを比較できます。












The app is not available for my android version 13.
Thanks