I.目的
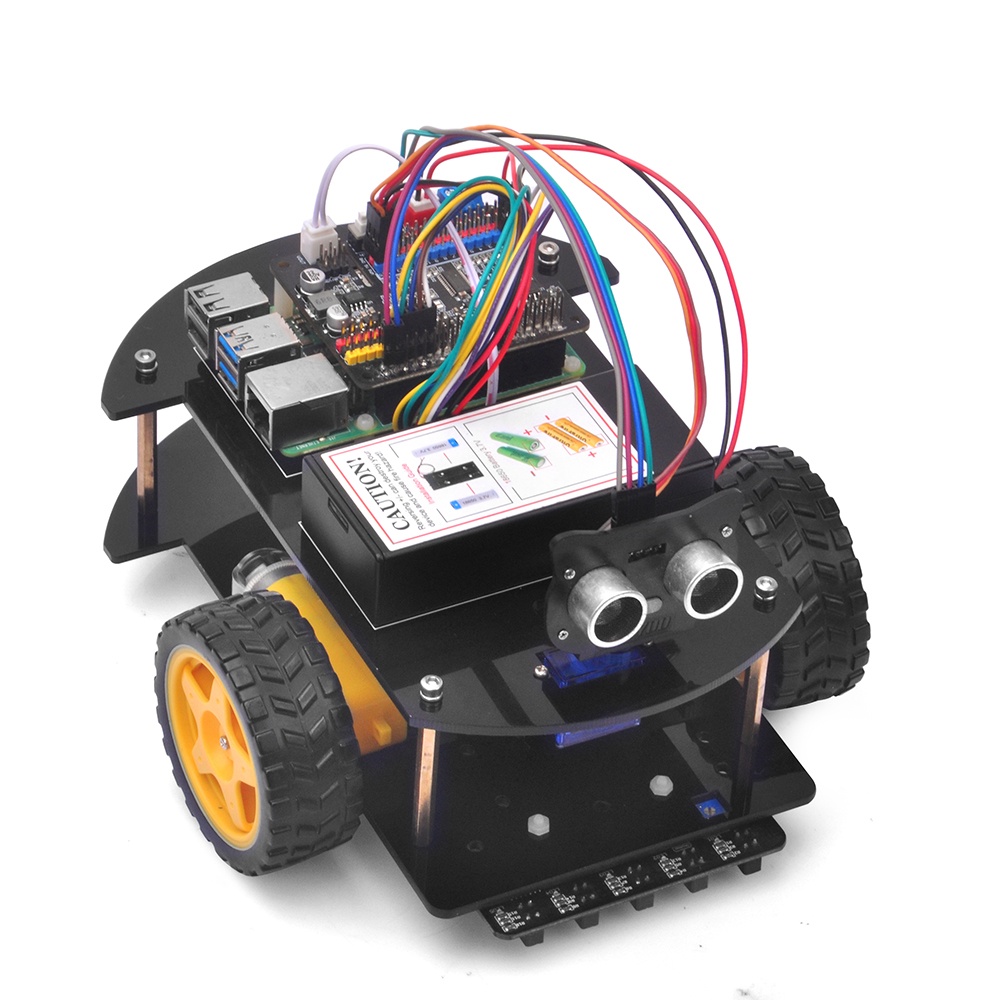
II.部品と装置
III.ハードウェアのインストール
IV.ソフトウェアのインストール

| 米国から購入 |
イギリスから購入 |
ドイツから購入 |
イタリアから購入 |
フランスから購入 |
スペインから購入 |
日本から購入 |
 |
 |
 |
 |
 |
 |
 |

インターネットを介してラズベリーパイロボットカーを制御する方法はたくさんあります。このプロジェクトでは、ラズベリーパイにWebサーバーをインストールするという一般的な方法を紹介します。つまり、PiボードをWebサイトに変え、ブラウジングまたは携帯電話APPを使用してラズベリーパイとデータを交換できます。


ステップ1: レッスン 2 に従ってスマート カーの基本フレームワークをインストールします。レッスン3を修了している場合は、そのままにしておくことができます

ステップ1)rpi.gpioとadafruit-pca9685ライブラリがインストールされていることを確認し、レッスン2でI1Cを有効にして、ロボットカーの電源を入れます。
ステップ2)次のコマンドを入力して、インストールシェルスクリプトファイルをダウンロードします。
wget http://osoyoo.com/driver/picar/pi-webserver4.sh
ステップ3)次のコマンドを入力します。
bash pi-webserver4.sh
上記のコマンドを実行すると、python Flaskライブラリがインストールされ、[pi-webserver]というディレクトリと、[pi-webserver]の下に[static]と[templates]という2つのサブディレクトリが自動的に作成されます:
pi-webserverディレクトリにはPythonコードファイルが格納され、静的ディレクトリにはCSSファイルが格納され、テンプレートフォルダにはHTMLファイルが格納されます。HTML、CSSファイルが何であるかわからない場合は、問題ではありません。
ステップ4)次のコマンドを入力してコードを実行します。
sudo python ~/pi-webserver/pi-webserver.py
ステップ5)あなたのpythonフラスコウェブサーバーが起動します。Raspberry Piと同じWi-FiネットワークであるPCまたは携帯電話で、ブラウザを開いてhttp://your_raspberry_pi_ip_address:5000にアクセスし(私の場合は http://192.168.0.107:5000)、ブラウザに5つの追跡センサーのステータスが表示されます。
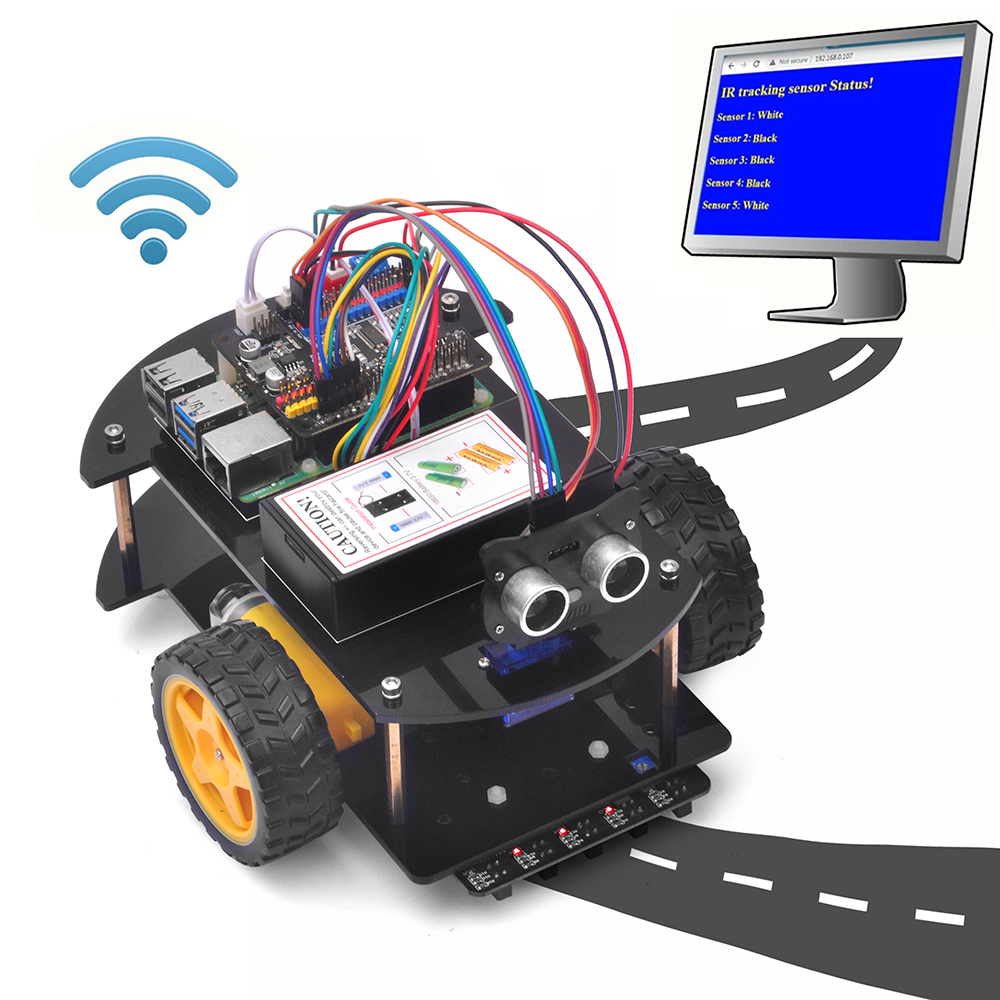
センサーの状態は5秒ごとに更新されるため、他のセンサーの下に黒い線を入れると、上記のWebページのセンサー値が5秒後に変わります。














