VIDEO
I.目的 II.部品と装置 III.ハードウェアのインストール IV.ソフトウェアのインストール
米国から購入
イギリスから購入
ドイツから購入
イタリアから購入
フランスから購入
スペインから購入
日本から購入
このレッスンでは、モバイルアプリを使用してUDPプロトコルを介してロボットカーを制御する方法を説明します。Raspberry Piは、APPからUDPパケットを取得するためにPythonプログラムを実行します。
Pythonを使用してモバイルアプリからリモートデータ(UDPパケット)を取得する方法を学習します。
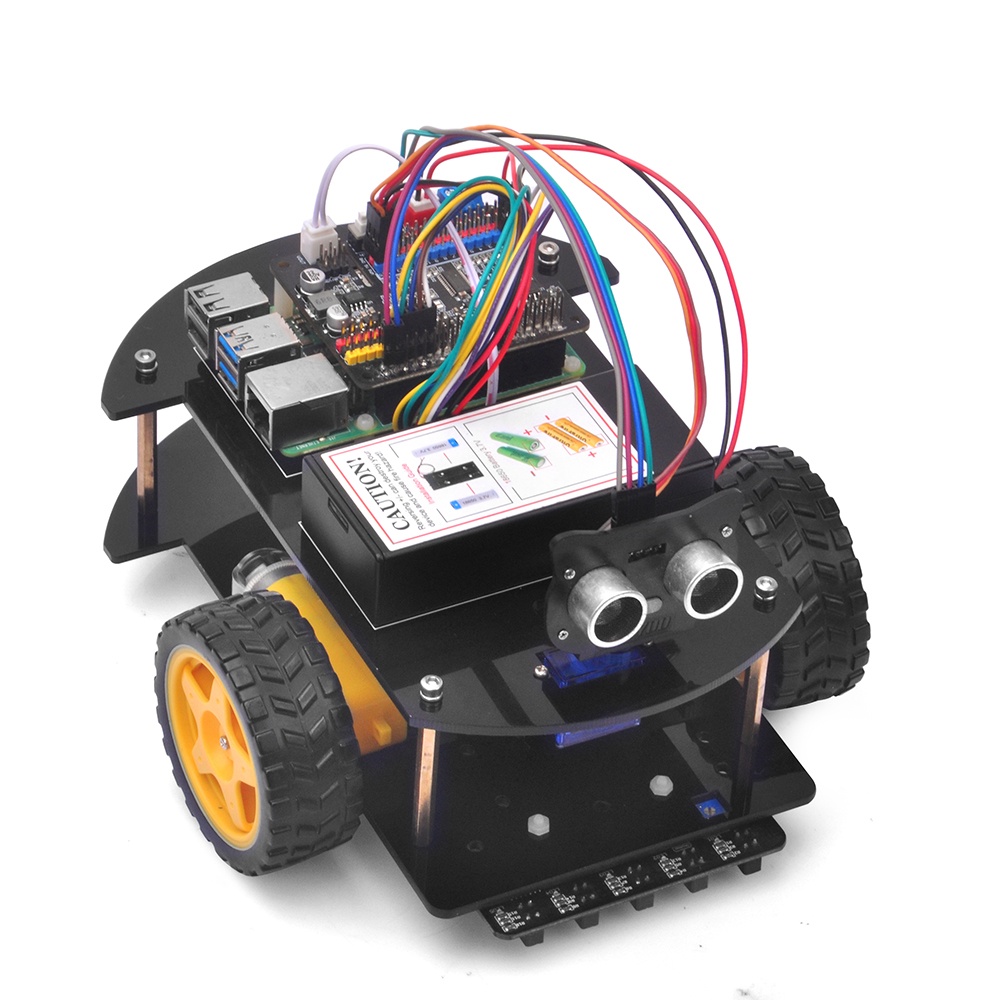
ステップ1: レッスン 3 に従ってスマート カーの基本フレームワークをインストールします。トラッキング センサー モジュールを取り付けない場合は、レッスン 2 のインストールを完了してください。
ステップ1) rpi.gpio と adafruit-pca9685 ライブラリがインストールされていることを確認し、レッスン 1 で I2C を有効にします。
ステップ2) ロボットカーの電源を入れ、次のコマンドを入力してサンプルコードをダウンロードします。
wget http://osoyoo.com/driver/picar/picar-udp-control4.py
ステップ3) 次のコマンドを入力してサンプルコードを実行します。
python picar-udp-control4.py
上記のPythonが実行された後、あなたの車はあなたの携帯電話からのコマンドを待っています。
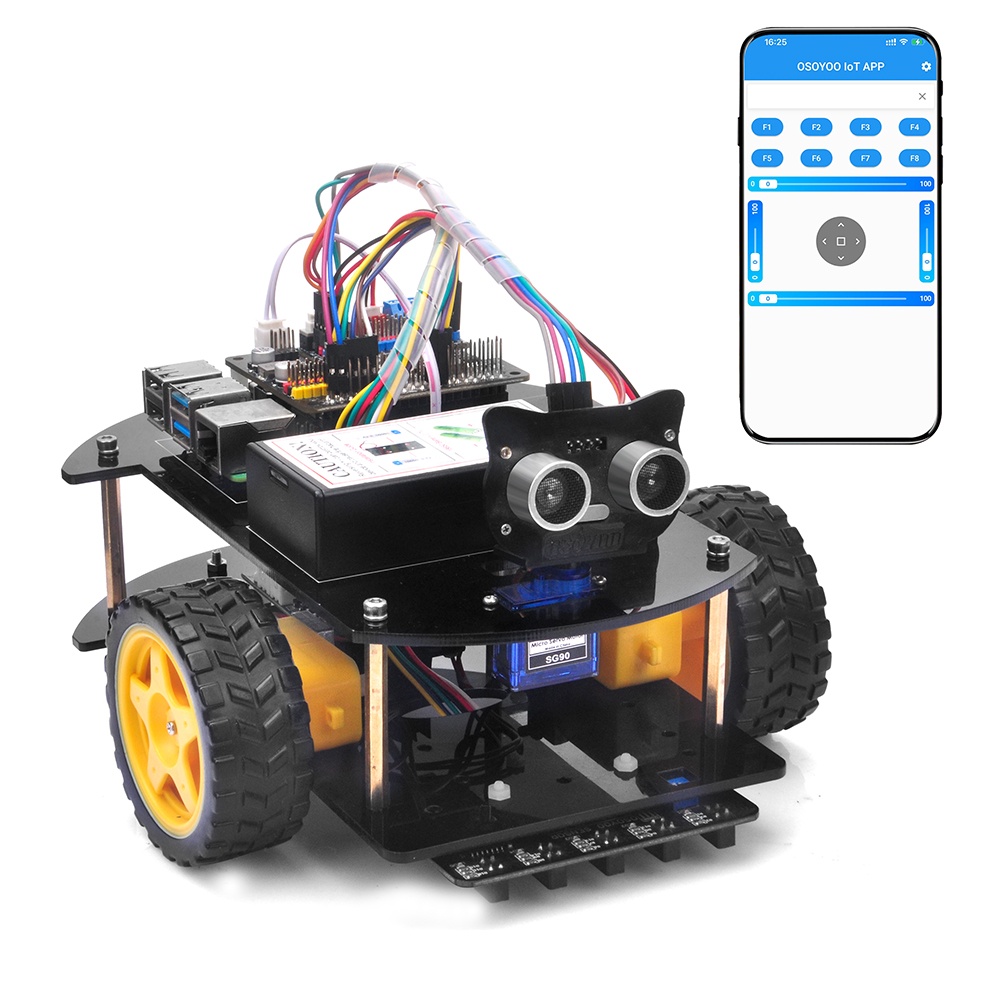
ステップ4) ダウンロード OSOYOO Wi-Fi UDP ロボットカーコントロールアプリ グーグルプレイやアップルストアでは、キーワードを検索してください “OSOYOO IoT UDP ロボットアプリ”, あなたは次のように赤いアイコンAPPを見つけるでしょう(ご注意:Google Playでこのアプリを見つけられない場合、以下のリンクから直接にアプリをダウンロードできます:https://osoyoo.com/driver/udp-app.apk
ステップ5) Raspberry Piと同じルーターのWi-Fi SSIDにスマホを接続します。アプリを開き、「設定アイコン(1)」をクリックして設定画面に入り、「Raspberry Pi IP address」と「Port」を「8888」に入力し、「Save」をクリックします:
ステップ6)
次に、車を地面に置き、< > ^ v方向キーをクリックして車を動かすことができます。使用する ||一時停止キーを使用して、車の動きを停止します。
障害物キー(F8)をクリックすると、車はレッスン3 と同様に障害物回避自動運転を行います
トラッキングキー(F7)をクリックすると、車はレッスン2 と同様にリンクトラッキング自動運転を実行します
注:F1~F6は、今後のさらなる開発機能です。
IoT UDPアプリとスケッチコードに関するFAQ:
Q1) ロボットカーの速度を調整する方法は?A: ロボットカーの速度性能を変更する場合は、ファイルの19〜21行目の次のパラメータの値を変更 picar-udp-control.py。
high_speed = 4000 # Max pulse length out of 4096
mid_speed = 2000 # Max pulse length out of 4096
low_speed = 1000 # Max pulse length out of 4096
Q 2) OSOYOO IoT UDP Robot APPのボタンを押すとどうなりますか?A: APPのボタンを押すと、APPはUDPプロトコルを介してターゲットデバイスのラズベリーパイに<>文字のメッセージを送信します
ボタン
UDP メッセージ
F1 キー
/
F2 キー
/
F3 キー
/
F4 キー
/
F5 キー
/
F6 キー
/
▲
前進
▼
戻る
►
右
◄
左
正方形
止める
F7 キー
トラッキング
F8 キー
障害
Q3) ラズベリーパイのpythonプログラムはどのようにUDPコマンドを処理しますか?cur_status に与える間 、290行目から318行目はcur_status を処理します。
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()
たとえば、APP ▲ キーを押すと、cur_status 値が A になり、ticker() 関数が forward(mid_speed,mid_speed) 関数を呼び出して車を前進させます。