ユーザーマニュアルは次の場所からダウンロードできます。
注:ARDUINO用のすべてのOSOYOO製品は、ARDUINOと完全に互換性のあるサードパーティボードです。
認定オンライン小売業者
| アメリカから購入 |
英国から購入 |
DEから購入 |
IT部門から購入 |
フランスから購入 |
ESから購入 |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |
目的
このレッスンでは、モバイルを使用してロボットカーを制御し、模倣運転を行います。模擬運転であるため、APPで仮想ステアリングホイールとギアを使用して、実際の車の対応するものを模倣します。
このレッスンを続行する前に、レッスン 2 の基本動作を完了しておく必要があります。
車のフレームを完成させない場合は、レッスン1を確認してください

部品・装置
ハードウェアのインストール
ステップ1:レッスン2に従ってスマートカーの基本フレームワークをインストールします。レッスン 1 で既にインストールを完了している場合は、そのままにしておきます。
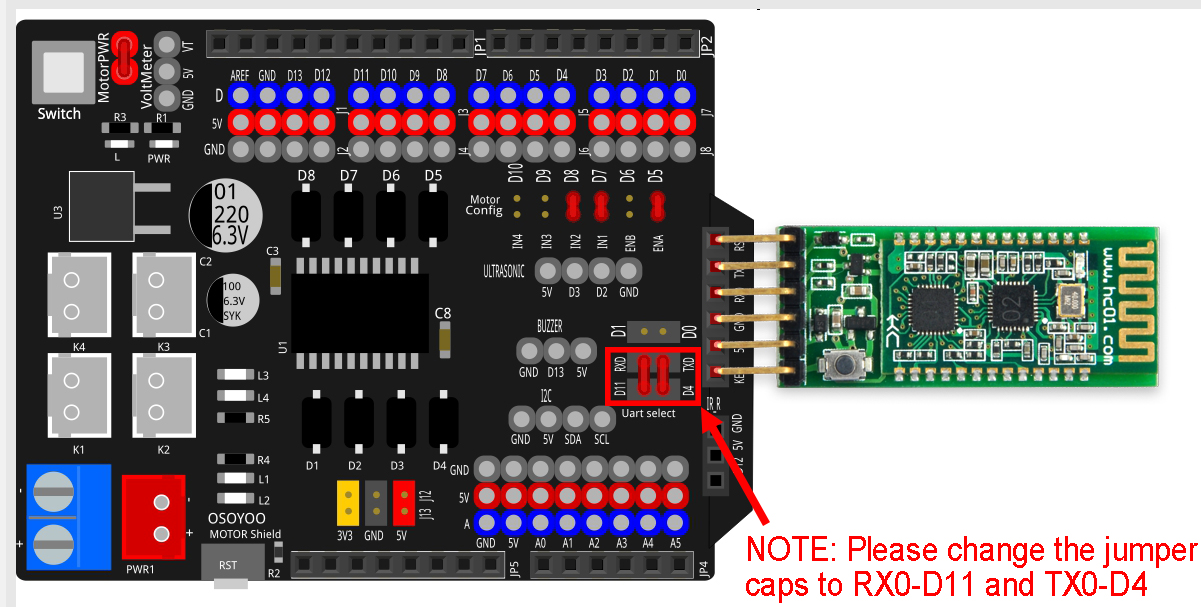
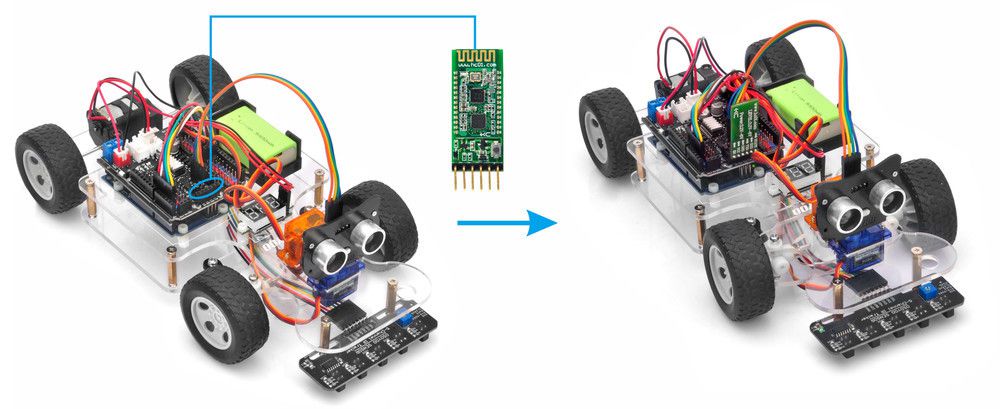
ステップ2:次のグラフのようにBluetoothモジュールをOSOYOOモーターシールド Bluetoothスロットに挿入します(注意:レッスン1で取り付けた既存のワイヤは取り外さないでください)。
ソフトウェアのインストール:
ステップ1:https://osoyoo.com/driver/sg90car/PWMServo.zip からPWMServoライブラリをダウンロードし、Arduino IDEにインポートしてください。レッスン 2 を完了している場合は、この手順をスキップしてください。
ステップ2:レッスン6のサンプルコードをダウンロードします。ダウンロードしたファイルを解凍すると、sg90car-lesson6Bというフォルダが表示されます。
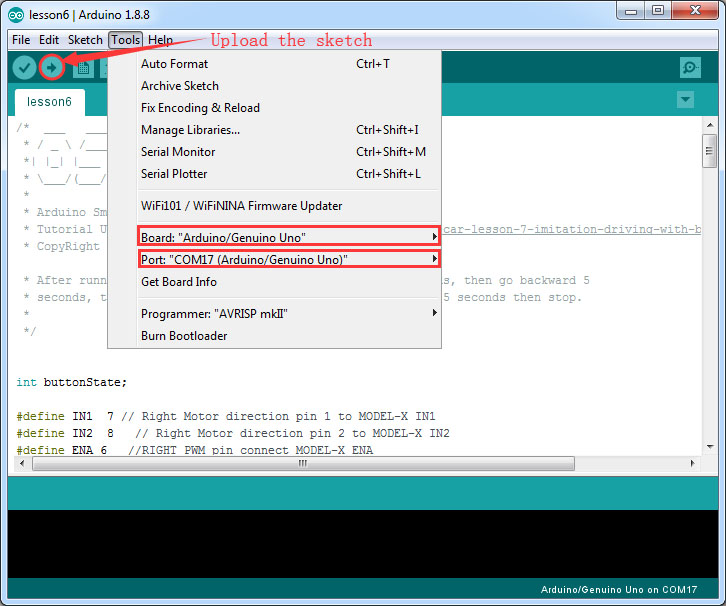
ステップ3:USBケーブルでArduino用OSOYOOベーシックボードをPCに接続し、ArduinoIDEを開き→ファイルをクリックして→開く→sg90car-lesson6Bフォルダ内のコード「sg90car-lesson6B.ino」を選択し、コードをOSOYOOベーシックボードfor Arduinoにロードします。(注意:スケッチコードをArduino用OSOYOOベーシックボードにアップロードするときは、Bluetoothモジュールを取り外し、バッテリーをシャットオフするか、電源アダプターを抜いてください。
ステップ4:90 行目のデフォルト値 19 をレッスン 1 の FRONT 値として変更してください。手順1のオプション5を使用してホイールの方向を合わせる場合は、この手順をスキップしてください。
#define FRONT 90 //degree when steering facing straight forward
ステップ5: プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。
ステップ6:APPを携帯電話にインストールします。
1)次のようにAndroidデバイスにAPPをインストールします
グーグルプレイストアでアプリ名「OSOYOO模倣運転」を検索し、以下のようにAPPをダウンロードしてスマートフォンにインストールします
あなたがアプリを見つけるためにグーグルプレイを使用することができない場合は、次のリンクからAPPをダウンロードしてください:https://osoyoo.com/test/mockdrive.apk。
2)次のようにアップルIOSデバイスにAPPをインストールします
Apple APPストアでAPP名「OSOYOO模倣運転」を検索し、以下のようにAPPをダウンロードしてスマートフォンにインストールします
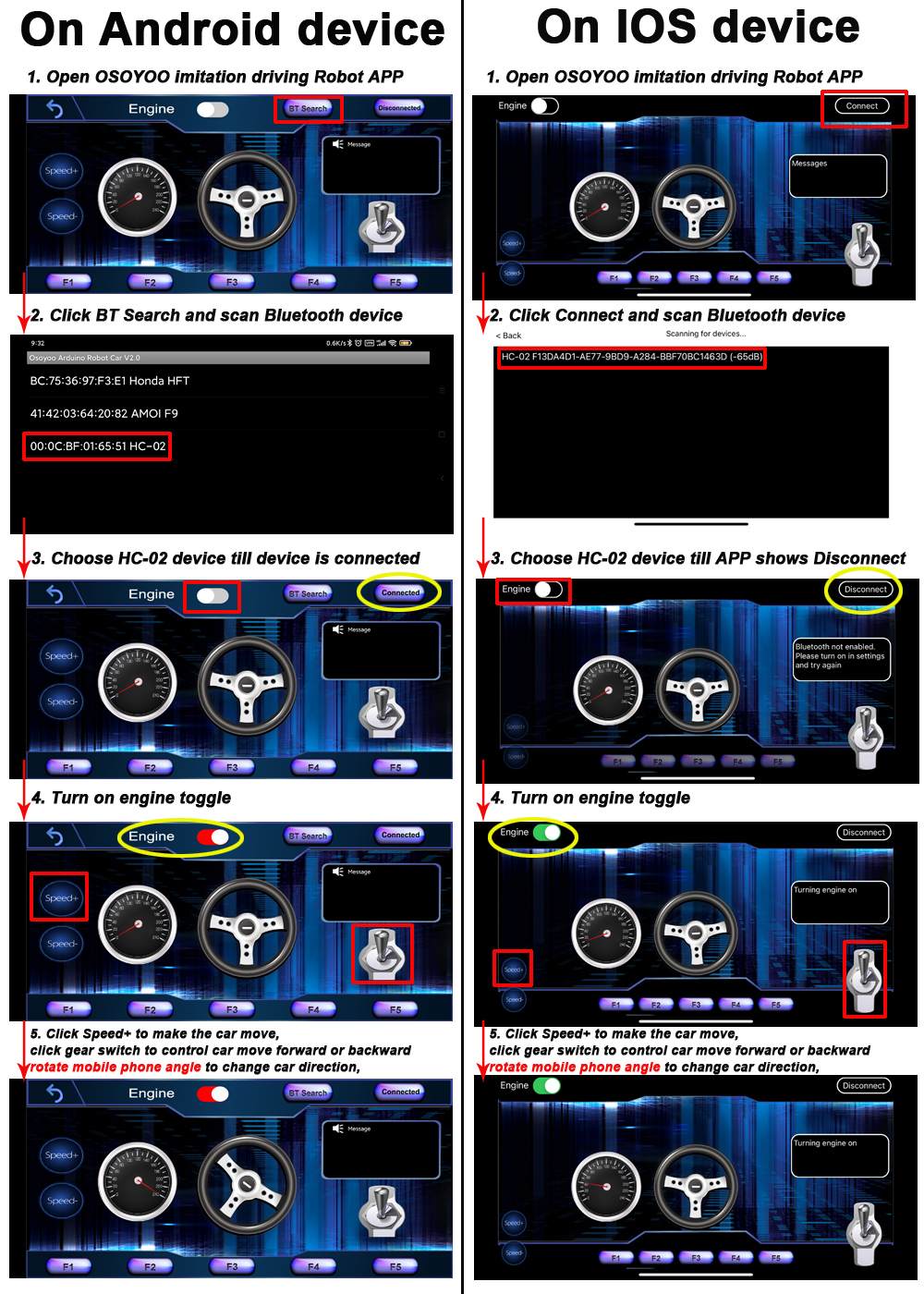
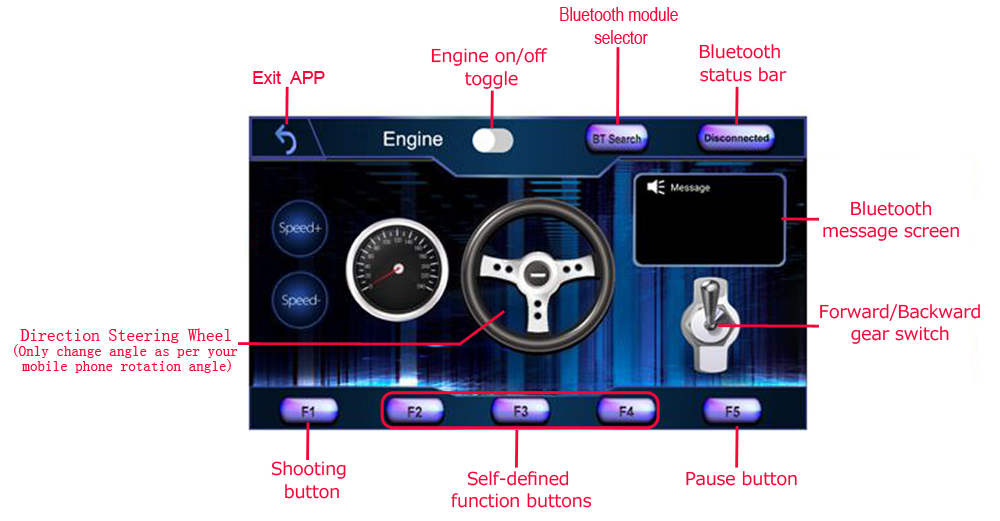
アプリUIの説明(UIはアンドロイドとIOSで異なります)
-
- アンドロイド携帯でHC-02 Bluetoothを接続します。 Android APPにはBT検索ボタンがあります:このボタンをクリックすると、APPとペアリングされたBluetoothデバイスリストが表示されます。 HC-02デバイスを選択して車を接続します。HC-02 が接続されると、Bluetoothステータスが [切断済み] から [接続済み] に変わります。Bluetoothが接続されている場合にのみ、車を制御できます。
- iPhone / iPadでHC-02 Bluetoothを接続し、[接続]ボタンをクリックするだけで、HC-02デバイスがポップアップリストに表示されます。HC-02デバイスがBluetoothモジュールをiPhoneに接続することをクリックします。次に、「接続」ボタンの名前が「切断」に変わります。
- エンジントグル:エンジントグルがオフ(白)に設定されている場合、車は停止し、APPのすべてのボタンが無効になります。エンジントグルをON(赤)に設定すると、車が動き始めます。他のすべての移動制御ボタンがアクティブになります。
- 前進/後退ギアスイッチ:このギアスイッチは、実際の車のギアのように車が前進または後退しているのを制御できます。
- F1、F2、F3、F4、F5のカスタマイズされたボタン。このレッスンでは、車の動きを一時停止するF5のみを使用します。F5ボタンとエンジンオフボタンの違いは、エンジンオフボタンに触れると、他のすべてのボタンが無効になることです。他のボタンを有効にするには、エンジンボタンをもう一度切り替える必要があります。一方、F5をクリックすると車は停止しますが、他のすべてのボタンは引き続きアクティブです。ボタンに触れなくても、携帯電話の角度の位置を変更するだけで(ハンドルを動かすように)、車は再び動きます。
- 方向ステアリングホイール:携帯電話の角度を回転させると、携帯電話の回転角度に応じてステアリングホイールの角度が変わります。これにより、車の方向が変わります。たとえば、ハンドルが時計回りに回転すると、車は左に移動します。ステアリングとフォワード/バックワードギアは、実際の車を運転しているのと同じように連携する必要があることを忘れないでください。たとえば、車を右側の梱包ロットに戻す場合は、ギアをR位置に設定し、ステアリングをカウント時計回りに回転させる必要があります。
-
- スピード+:ロボットカーをスピードアップさせる
- 速度-:ロボットカーを減速させる
APPをHC-02 Bluetoothモジュールに接続します
- Androidデバイスと接続する:
Androidデバイスを使用していて、Bluetoothモジュールを携帯電話とペアリングしていない場合は、APPを開く前に、まずBluetoothモジュールをペアリングしてください。携帯電話の設定→Bluetoothで、HC02というBluetoothデバイスを見つけ、パスワード1234とペアリングします。HC02デバイスがペアリングBluetoothたら、APPを開きます。 BT検索ボタンをクリックして、APPをHC02デバイスに接続します。
- iOSデバイスと接続する:
iOSデバイスを使用している場合は、APPを開いて[接続]ボタンをクリックすると、Bluetoothリストが表示され、HC02デバイスを選択します。
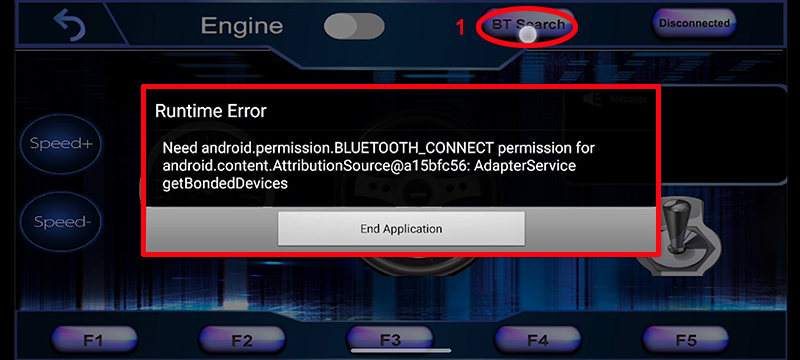
ご注意: もし、Android デバイス(最新AndroidOS)で「BT search」ボタンをクリックして以下のエラーポップが表示された場合は、次の手順に従ってください:
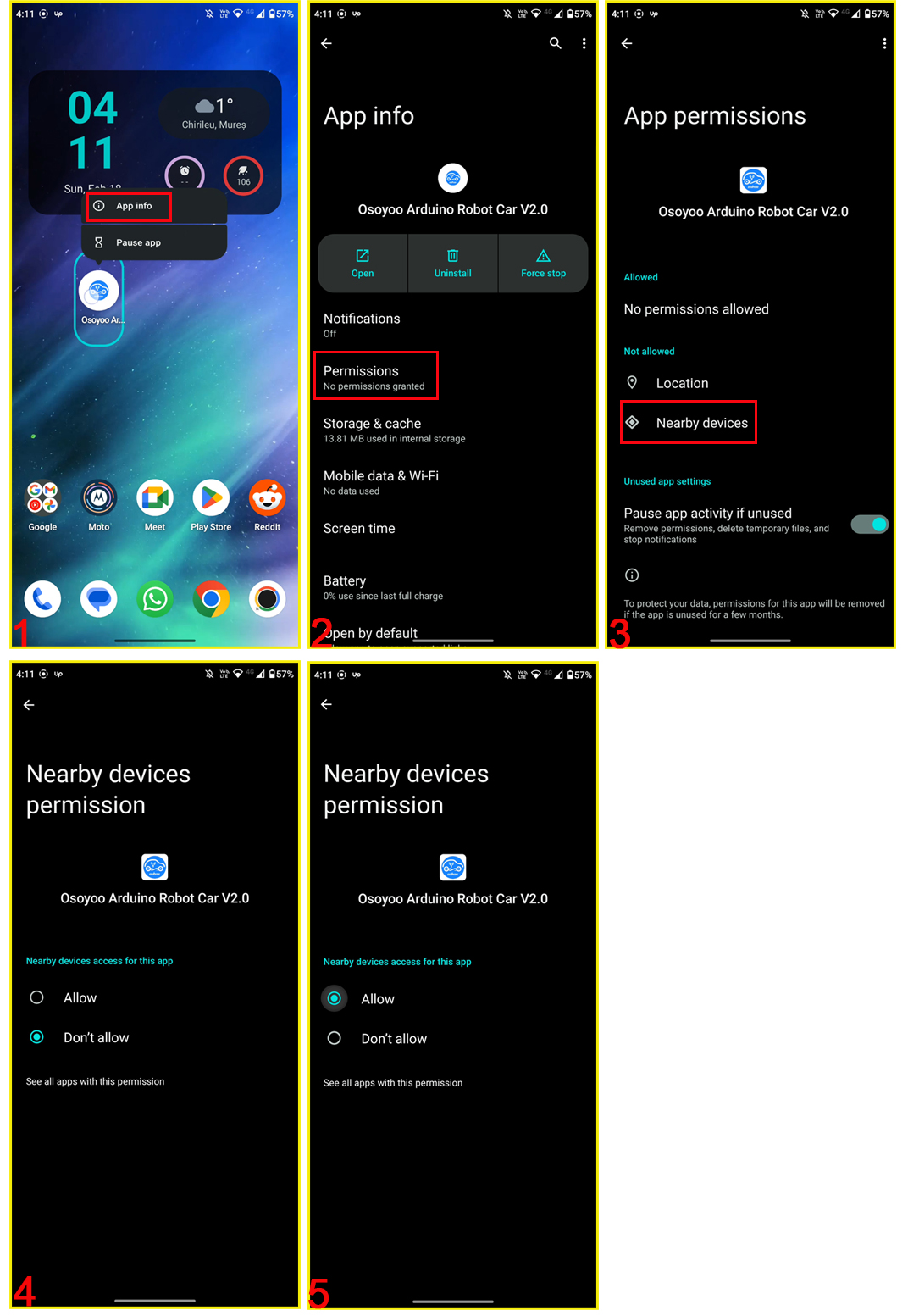
1. OSOYOO imitationアプリのアイコンを長押しして、「APP info」を選択します。
2.「Permissions」を選択します。
3.「Nearby device」を選択し、「Allow」に変更します(設定の詳細については、次のビデオをご覧ください: https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson7/APP.mp4 )
ステップ1)ロボットカーを地面に置き、バッテリースイッチをオンにします。
ステップ2)携帯電話→設定→Bluetooth設定に移動し、HC-02と呼ばれるBluetoothデバイスを検索し、コード1234とペアリングします
ステップ3)OSOYOO模倣運転ロボットアプリを開き、[BT検索]ボタンをクリックして、ペアリングしたBluetoothを見つけます
ステップ4)エンジントグルをオンにし、Speed+をクリックして、ロボットカーが最初は非常に遅いため、ロボットをスピードアップさせます。携帯電話の角度を回転させると、車の方向が変わります。
あなたの運転を楽しんでください!