概述
通过前面课程的学习,我们知道raspberry Pi可以做很多事情,能处理各种数字传感器,但是美中不足的是Raspberry Pi不能直接处理模拟信号,因为Pi没有ADC(analog to digital converters ),这样会限制输出模拟信号的传感器无法在Pi上使用,那如何解决这个问题呢?本课我们将一起探索如何用Pi读取模拟信号。
所需物料
1 * Raspberry Pi
1 * Breadboard
1 * MCP3008
Several jumper wires
工作原理
其实要解决上面的问题并不难,只需要在Pi上扩展一个模数转换器(ADC)就可以了,模数转化器有很多类型。在本课中我们使用Micochip公司的MCP3008,如果你对输出通道数量没有要求,MCP3004也是可以的。MCP3008一个10位8通道的ADC,MCP3004是10位4通道ADC,除了通道数量不一样,其他特性都相同,都是SPI(Serial Peripheral Interface Bus)接口,关于SPI总线更多信息请看这里,工作电压为2.7-5.5 VDC,关于MCP3004/8更多特性请参考芯片数据手册:https://osoyoo.com/driver/MCP3008_datasheet.pdf
MCP3008
MCP3008可以将模拟信号转换成数字信号,这样Pi就能够间接处理模拟信号了,在本课中,用pi的3.3V和GND分别作为MCP3008的模拟通道1和通道2的输入,MCP3008将这个模拟输入信号转换成数字量,Pi通过SPI读取这个数字量,通过计算将其实际电压值输出
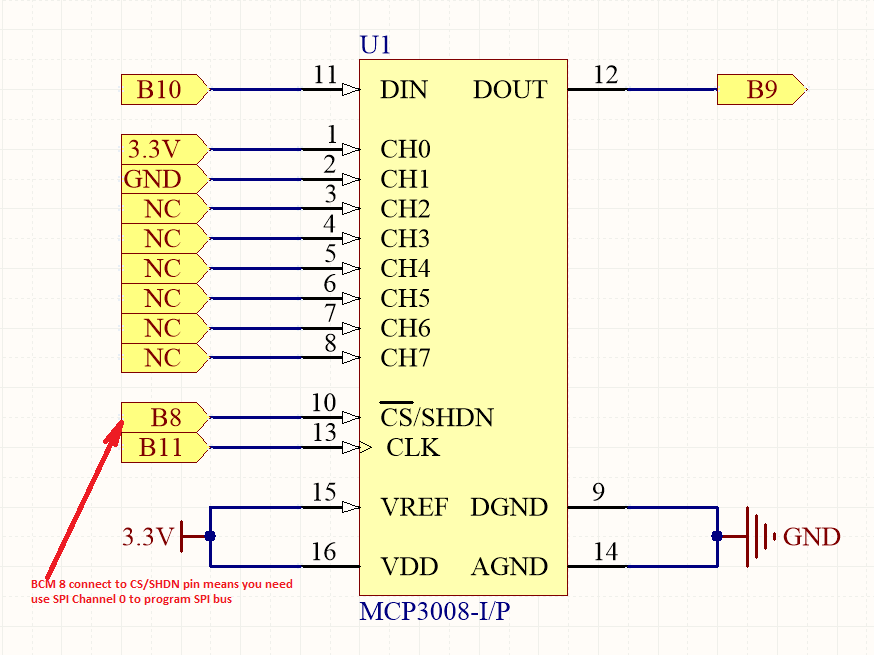
MCP3008是SPI接口,所以将其与Raspberry Pi的硬件SPI相应GPIO口连接在一起。图中的NC(Not Connected)表示悬空,啥也不接。
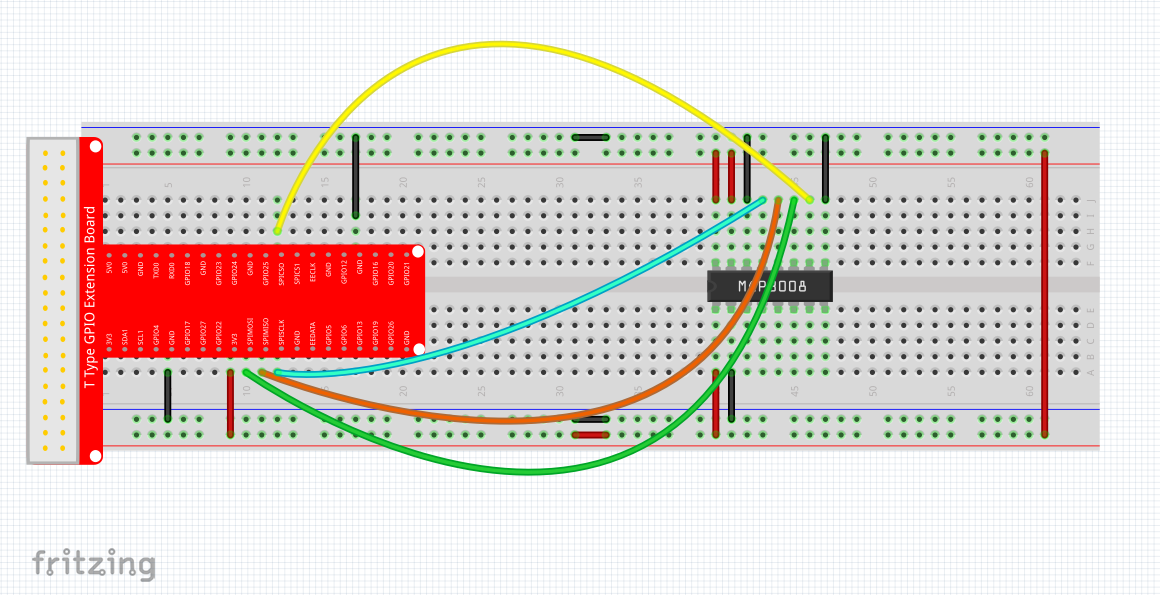
实物连线图
软件
对于C语言用户,请看下面
1 ) MCP3008需要SPI时序来驱动,我们用的是Raspberry Pi的硬件SPI,但是对于有些Raspbian镜像在内核中默认没有加载有些模块,如SPI、IIC等,所以在进行编程之前需要检查你的Raspbian是否已经加载了SPI,如果没有需要手动加载,具体方法前看看面。
用编辑器打开‘/etc/modprobe.d/raspi-blacklist.conf’
sudo nano ‘/etc/modprobe.d/raspi-blacklist.conf’
如果打开什么东西也没有,说明你的Raspbian已经加载了相关模块,请跳过此步;如果看到这样的内容
#blacklist spi-bcm2708
#blacklist i2c-bcm2708
说明你的Raspbian没有加载SPI、IIC设备,你需要将这两句话前面的#去掉
打开SPI接口
sudo nano /boot/config.txt
打开config.txt文件后,找到dtparam=spi=on(或者dtparam=spi=off),将其改成图示样子

按键盘上的Ctrl +X根据提示输入Y保存退出,让后在命令行输入reboot是修改生效。
2) 在/home/pi目录下新建一个.c源文件,名字随意(你开心就好)
cd ~
sudo nano readmcp300x.c
2) 编码
向新建的文件中输入一下代码
#include <unistd.h>
#include <stdint.h>
#include <string.h>
#include <errno.h>
#include <wiringPi.h>
#include <stdio.h>
#include <stdlib.h>
#include <wiringPiSPI.h>
#define TRUE (1==1)
#define FALSE (!TRUE)
#define CHAN_CONFIG_SINGLE 8
#define CHAN_CONFIG_DIFF 0
static int myFd ;
char *usage = "Usage: mcp3008 all|analogChannel[1-8] [-l] [-ce1] [-d]";
// -l = load SPI driver, default: do not load
// -ce1 = spi analogChannel 1, default: 0
// -d = differential analogChannel input, default: single ended
void loadSpiDriver()
{
if (system("gpio load spi") == -1)
{
fprintf (stderr, "Can't load the SPI driver: %s\n", strerror (errno)) ;
exit (EXIT_FAILURE) ;
}
}
void spiSetup (int spiChannel)
{
if ((myFd = wiringPiSPISetup (spiChannel, 10000)) < 0)
{
fprintf (stderr, "Can't open the SPI bus: %s\n", strerror (errno)) ;
exit (EXIT_FAILURE) ;
}
}
int myAnalogRead(int spiChannel,int channelConfig,int analogChannel)
{
if(analogChannel<0 || analogChannel>7)
return -1;
unsigned char buffer[3] = {1}; // start bit
buffer[1] = (channelConfig+analogChannel) << 4;
wiringPiSPIDataRW(spiChannel, buffer, 3);
return ( (buffer[1] & 3 ) << 8 ) + buffer[2]; // get last 10 bits
}
void print_info()
{
printf("\n");
printf("|*****************************************|\n");
printf("| Read MCP3008(3004) ADC value |\n");
printf("| ------------------------------ |\n");
printf("| | ADC | | Pi | |\n");
printf("| |-----|-----------|-----| |\n");
printf("| | CS | connect to| CE0 | |\n");
printf("| | Din | connect to| MOSI| |\n");
printf("| | Dout| connect to| MISO| |\n");
printf("| | CLK | connect to| SCLK| |\n");
printf("| | CH0 | connect to| 3.3V| |\n");
printf("| | CH1 | connect to| GND | |\n");
printf("| OSOYOO|\n");
printf("|*****************************************|\n");
printf("\n");
}
int main (int argc, char *argv [])
{
int loadSpi=FALSE;
int analogChannel=0;
int spiChannel=0;
int channelConfig=CHAN_CONFIG_SINGLE;
if (argc < 2)
{
fprintf (stderr, "%s\n", usage) ;
return 1 ;
}
if((strcasecmp (argv [1], "all") == 0) )
argv[1] = "0";
if ( (sscanf (argv[1], "%i", &analogChannel)!=1) || analogChannel < 0 || analogChannel > 8 )
{
printf ("%s\n", usage) ;
return 1 ;
}
int i;
for(i=2; i<argc; i++)
{
if (strcasecmp (argv [i], "-l") == 0 || strcasecmp (argv [i], "-load") == 0)
loadSpi=TRUE;
else if (strcasecmp (argv [i], "-ce1") == 0)
spiChannel=1;
else if (strcasecmp (argv [i], "-d") == 0 || strcasecmp (argv [i], "-diff") == 0)
channelConfig=CHAN_CONFIG_DIFF;
}
//
if(loadSpi==TRUE)
loadSpiDriver();
wiringPiSetup () ;
spiSetup(spiChannel);
print_info();
//
if(analogChannel>0)
{
printf("MCP3008(CE%d,%s): analogChannel %d = %d\n",spiChannel,(channelConfig==CHAN_CONFIG_SINGLE)
?"single-ended":"differential",analogChannel,myAnalogRead(spiChannel,channelConfig,analogChannel-1));
}
else
{
for(i=0; i<8; i++)
{
printf("MCP3008(CE%d,%s): analogChannel %d = %d\n",spiChannel,(channelConfig==CHAN_CONFIG_SINGLE)
?"single-ended":"differential",i+1,myAnalogRead(spiChannel,channelConfig,i));
}
}
close (myFd) ;
return 0;
}
按键盘上的Ctrl +X根据提示输入Y保存退出。
完整的程序源码,可以在命令行运行一下命令获取
sudo wget http://osoyoo.com/driver/pi3_start_learning_kit_lesson_10/readmcp3008.c
在程序开头先包含了程序运行需要的头文件,其中有两个是驱动MCP3008必须的头文件,一个是wiringPi,一个是wiringPiSPI。对于前者在之前的课程中都有用到,就不在赘述;后者是针对树莓派板载SPI开发的一个函数库,利用这个库可以更加容易使用Raspberry Pi板载SPI功能,关于wiringPiSPI更多信息请看这里
SPI Library
#define CHAN_CONFIG_SINGLE 8
#define CHAN_CONFIG_DIFF 0
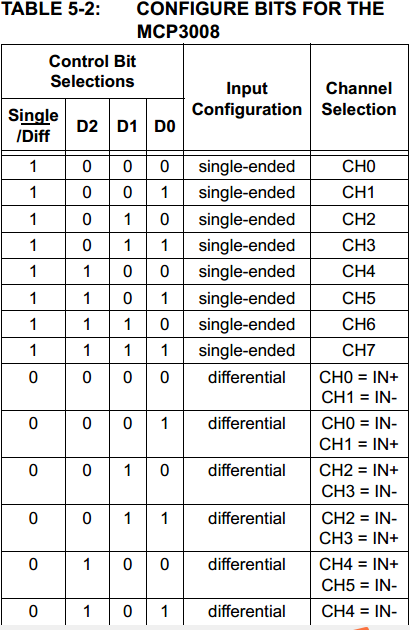
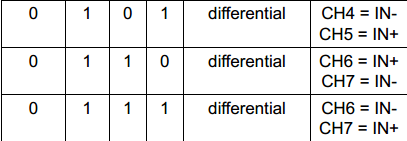
因为MCP3008支持单端信号输入和(single-ended mode)和差分输入(differential input mode),本课中我采用单端输入模式,CHAN_CONFIG_SINGLE变量表示相应输入端(CHx)配置为单端输出模式(8表示通道0为单端输入模式),CHAN_CONFIG_DIFF表示相应输入端(CHx)配置为差分输入模式(0意思是说通道0为差分输入模式),依据数据手册可以计算每个通道在不同输入模式下的值
static int myFd ;
定义了一个文件描述符( file-descriptor),用于接收wiringPiSPISetup函数的返回值
char *usage = "Usage: mcp3008 all|analogChannel[1-8] [-l] [-ce1] [-d]";
// -l = load SPI driver, default: do not load
// -ce1 = spi analogChannel 1, default: 0
// -d = differential analogChannel input, default: single ended
usage指针里面存放了这个程序的用法,如果在运行程序时候输入参数出错,屏幕会打印出usage变量,提示用户正确输入
void spiSetup (int spiChannel)
{
if ((myFd = wiringPiSPISetup (spiChannel, 10000)) < 0)
{
fprintf (stderr, "Can't open the SPI bus: %s\n", strerror (errno)) ;
exit (EXIT_FAILURE) ;
}
}
这是一个自定义函数,在这个函数里面调用了wiringPiSPI库里面的wiringPiSPISetup函数,初始化spiChannel号SPI,并SPI通信速率设置成了10KHz,其中spiChannel表示Raspberry Pi第几个SPI,Raspberry Pi一共有2个硬件SPI,它们共用SCLK、MOSI、MISO三条线,通过CE0和CE1区分SPI0和SPI1,在本课中我们将MCP3008的片选脚(Chip Select/Shutdown Input)接到Pi的CE0上,即我们使用的是Pi的SPI0.如果wiringPiSPISetup返回值小于0,说明SPI初始化出错,并在屏幕上打印出错信息。
int myAnalogRead(int spiChannel,int channelConfig,int analogChannel)
{
if(analogChannel<0 || analogChannel>7)
return -1;
unsigned char buffer[3] = {1}; // start bit
buffer[1] = (channelConfig+analogChannel) << 4;
wiringPiSPIDataRW(spiChannel, buffer, 3);
return ( (buffer[1] & 3 ) << 8 ) + buffer[2]; // get last 10 bits
}
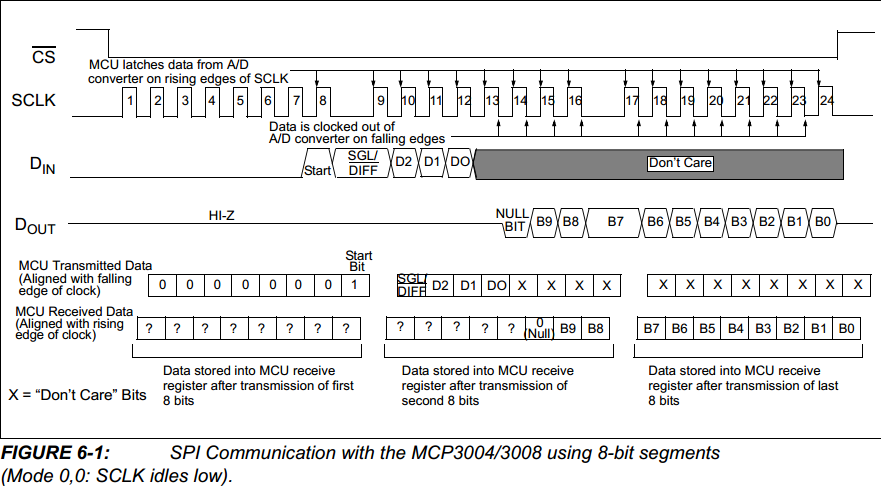
这个函数用于读取MCP3008数据,因为MCP3008只有8个输入端,如果参数analogChannel不在0-7范围内,返回-1;结合MCP3008数据手册知道第一个子节和第二个子节的高6位是无效的,有效数据为是第二个子节的低2位和第三个子节,一共10位。
3) 编译
gcc -Wall -o readmcp3008 readmcp3008 .c -iwiringPi
4) 执行程序
a)在运行程序之前请用gpio readall的命令检查MOSI、MISO、SCLK(B10、B9、B11)这几个口是否工作于ALT0模式(alternative functions),如果这几个口处于ALT0模式,则可以跳到b;如若不是请用下面的shell命令将他们变成ALT0模式
gpio -g mode 9 alt0
gpio -g mode 10 alt0
gpio -g mode 11 alt0
如果你想查看8个通道的值,运行下面的命令:
./readmcp3008 all
如果你只想查看指定通道的值,例如通道1,运行下面的命令
./readmcp3008 1
5) 最终结果
正确输入参数,运行上面的程序,屏幕上会打印出MCP3008主要引脚与Pi的连接关系,也会打印出你想查看的通道的结果。因为我们将CH1接到3.3V,CH2接到0V,所以转换后,输出通道1的值是1024,输出通道2是0
对于Python用户
1) 在/home/pi下新建一个.py脚本文件,文件名随意(你爱咋咋地)
cd ~
sudo nano readmcp3008.py
2) 编码
import time
import os
import RPi.GPIO as GPIO
# change these as desired - they're the pins connected from the
# SPI port on the ADC to the Cobbler
SPICLK = 11
SPIMISO = 9
SPIMOSI = 10
SPICS = 8
#DEBUG = 1
#setup function for some setup---custom function
def setup():
GPIO.setwarnings(False)
#set the gpio modes to BCM numbering
GPIO.setmode(GPIO.BCM)
# set up the SPI interface pins
GPIO.setup(SPIMOSI, GPIO.OUT)
GPIO.setup(SPIMISO, GPIO.IN)
GPIO.setup(SPICLK, GPIO.OUT)
GPIO.setup(SPICS, GPIO.OUT)
#print message at the begining ---custom function
def print_message():
print ('|**********************************|')
print ('| Read MCP3008(3004) ADC value |')
print ('| ----------------------------- |')
print ('| | ADC | | Pi | |')
print ('| |-----|-----------|-----| |')
print ('| | CS | connect to| CE0 | |')
print ('| | Din | connect to| MOSI| |')
print ('| | Dout| connect to| MISO| |')
print ('| | CLK | connect to| SCLK| |')
print ('| | CH0 | connect to| 3.3V| |')
print ('| | CH1 | connect to| GND | |')
print ('| ----------------------------- |')
print ('| OSOYOO|')
print ('|**********************************|\n')
print ('Program is running...')
print ('Please press Ctrl+C to end the program...')
print ('please input 0 to 7...')
# read SPI data from MCP3008 chip, 8 possible adc's (0 thru 7)
def readadc(adcnum, clockpin, mosipin, misopin, cspin):
if ((adcnum > 7) or (adcnum < 0)):
return -1
GPIO.output(cspin, True)
GPIO.output(clockpin, False) # start clock low
GPIO.output(cspin, False) # bring CS low
commandout = adcnum
commandout |= 0x18 # start bit + single-ended bit
commandout <<= 3 # we only need to send 5 bits here
for i in range(5):
if (commandout & 0x80):
GPIO.output(mosipin, True)
else:
GPIO.output(mosipin, False)
commandout <<= 1
GPIO.output(clockpin, True)
GPIO.output(clockpin, False)
adcout = 0
# read in one empty bit, one null bit and 10 ADC bits
for i in range(12):
GPIO.output(clockpin, True)
GPIO.output(clockpin, False)
adcout <<= 1
if (GPIO.input(misopin)):
adcout |= 0x1
GPIO.output(cspin, True)
adcout >>= 1 # first bit is 'null' so drop it
return adcout
#main function
def main():
#print info
print_message()
analogChannel = int(input())
if (analogChannel < 0) or (analogChannel > 7):
print ('input error analogChannel number!')
print ('please input 0 to 7...')
else:
adc = readadc(analogChannel, SPICLK, SPIMOSI, SPIMISO, SPICS)
print ('analogChannel %d = %d'%(analogChannel,adc))
#define a destroy function for clean up everything after the script finished
def destroy():
#release resource
GPIO.cleanup()
#
# if run this script directly ,do:
if __name__ == '__main__':
setup()
try:
main()
#when 'Ctrl+C' is pressed,child program destroy() will be executed.
except KeyboardInterrupt:
destroy()
按键盘上的Ctrl +X根据提示输入Y保存退出。
完整的程序源码,可以在命令行运行一下命令获取
sudo wget http://osoyoo.com/driver/pi3_start_learning_kit_lesson_10/readmcp3008.py
3) 运行程序
sudo python ./readmcp3008.py
然后输入你想读取的输出通道,例如0,就在SHH终端输入0再回车,就能打印出输出通道0的数据。
4) 最终结果
在SSH终端输入sudo python ./readmcp3008.py后屏幕会打印出MCP3008与Pi的连接信息以及输入参数范围(0-7),如果输入的参数不在正确范围,程序会输入错误提示;如果输入的参数在0-7范围内,那就打印出对应端口的数据。









