第一部分:硬件安装
坦克智能小车底盘组成图

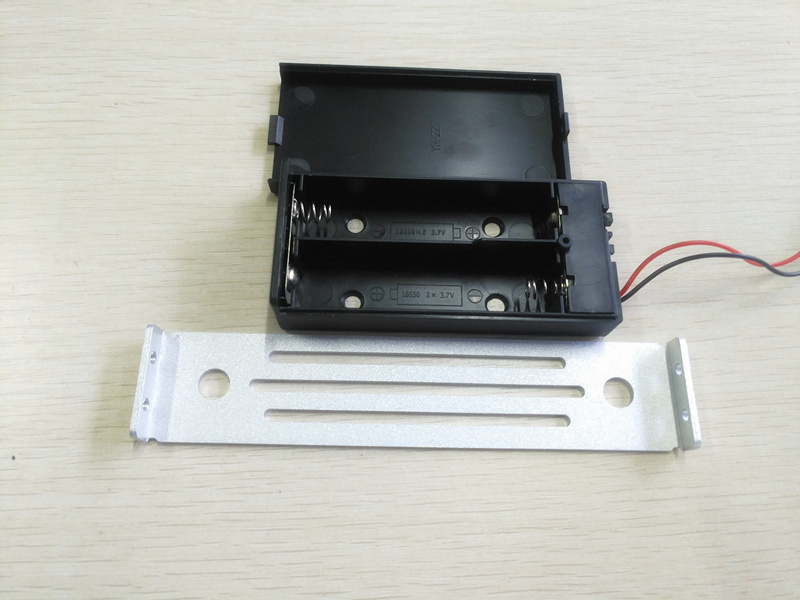
1.安装电池盒
所需器件
电池盒 x1
一号车板 x1
M3*6十字螺丝 x2
M3螺帽 x2
将电池盒滑盖打开,用M3*6十字螺丝把电池盒固定在一号车板活动卡槽里面

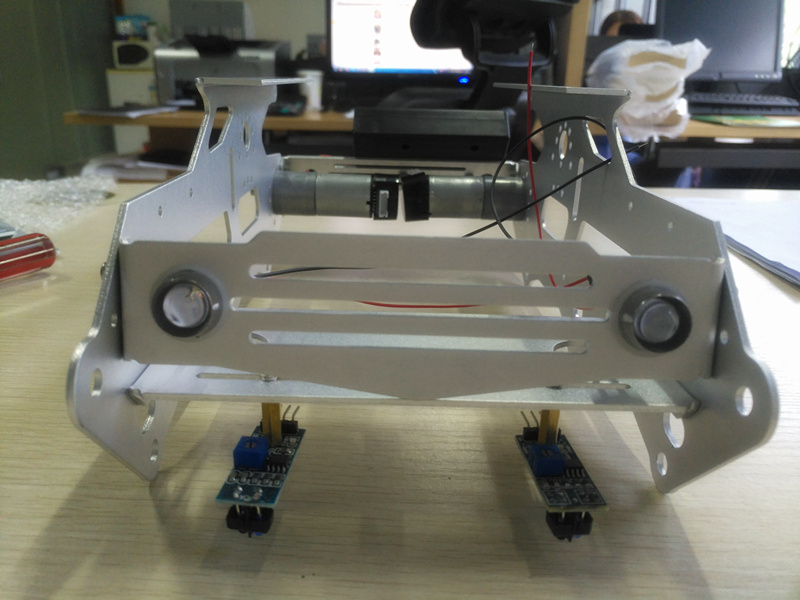
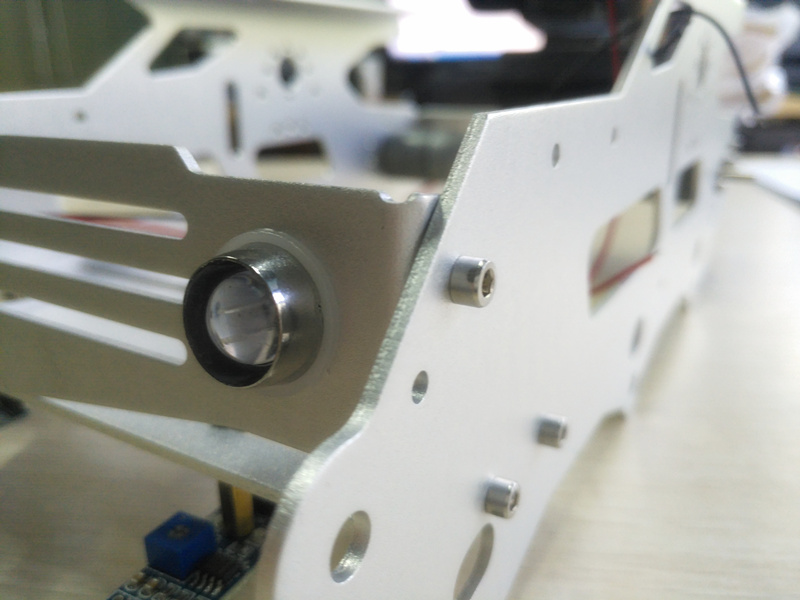
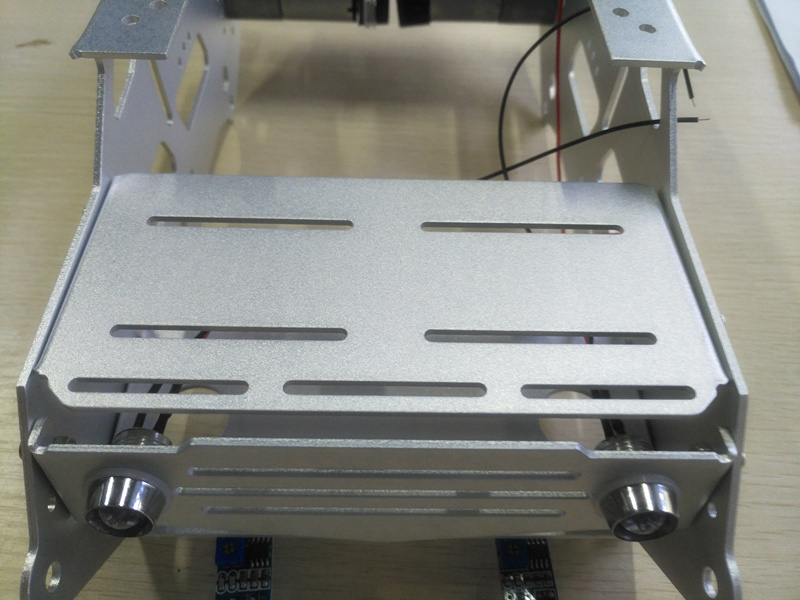
2.安装LED
将2个LED灯珠卡在二号车板圆孔中,应螺帽锁紧
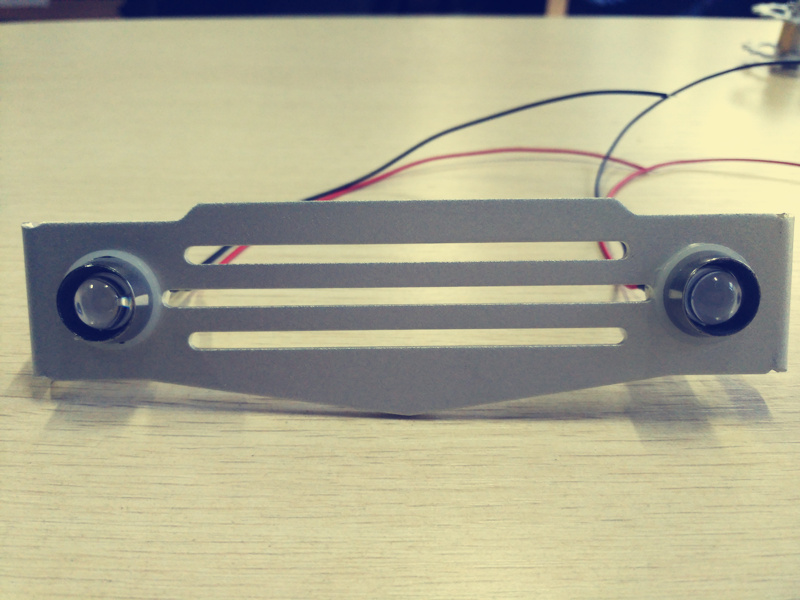
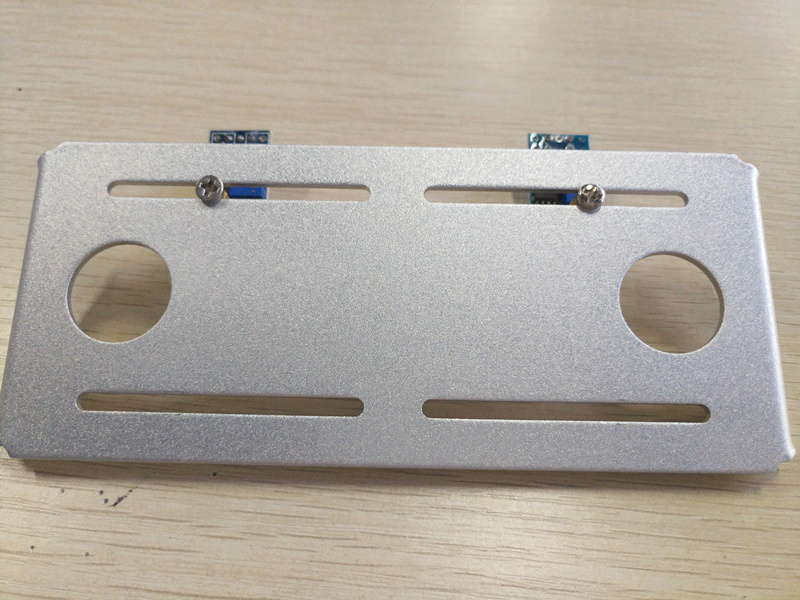
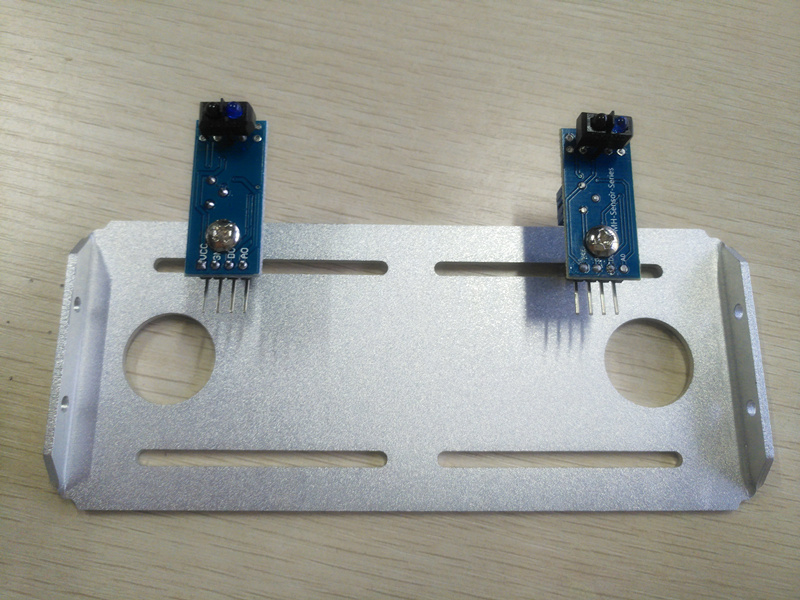
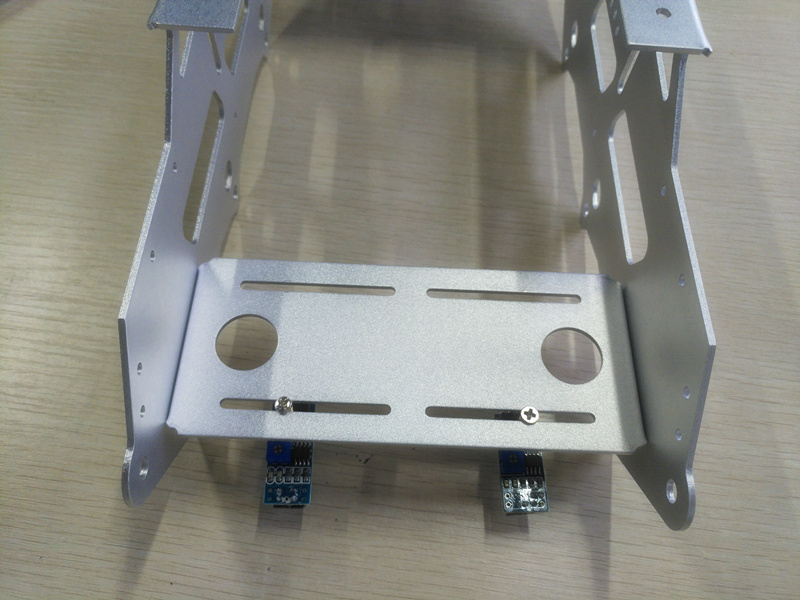
3.安装循迹模块
所需器件
M3*12双通铜柱 x2
M3*6十字螺丝 x4
循迹传感器模块 x2
铜柱一端用M3*6螺丝固定在4号面板活动卡,另一端将循迹传感器也用M386螺丝固定在铜柱上
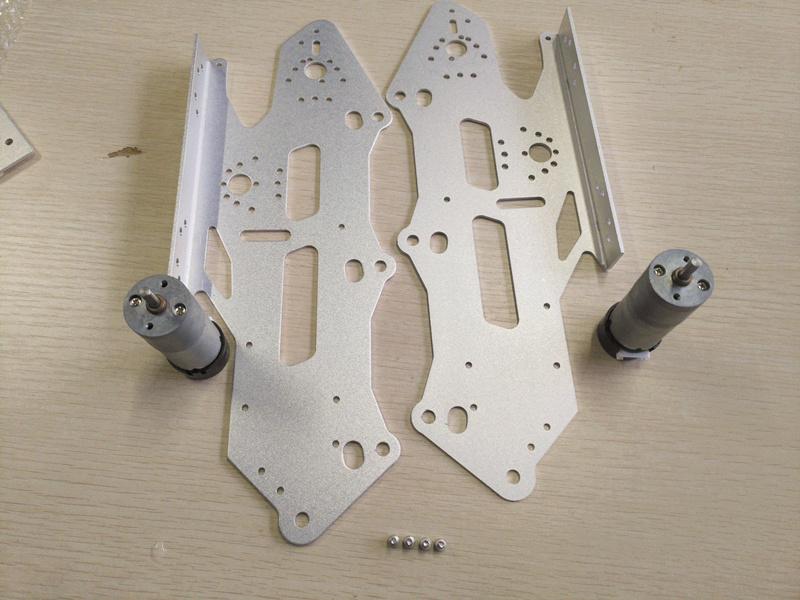
4.安装电机
所需器件
左右侧板 x2
电机 x2
M3*6螺丝 x4
将电机用M3*6内六角螺丝固定在左右侧板上
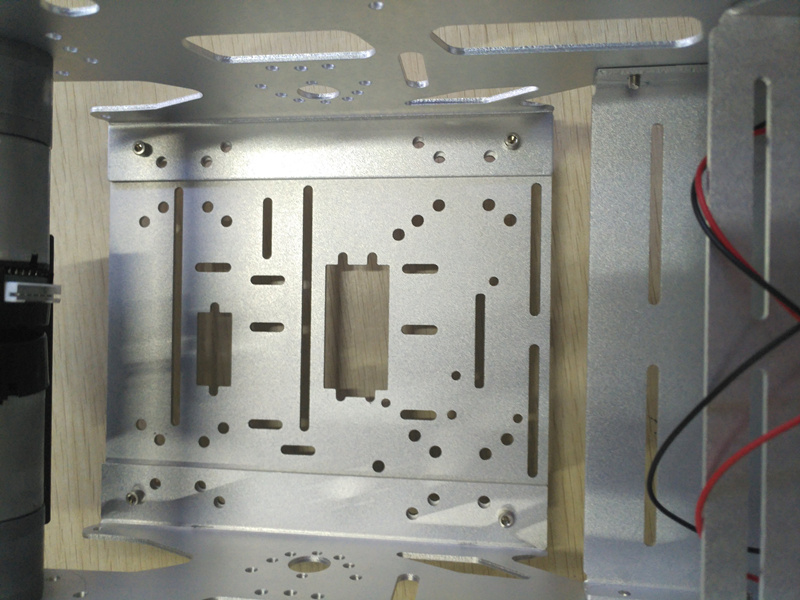
5.安装车架
用4颗M3*8内六角螺丝将一号车板和左右侧边偏接起来
用4颗M3*8内六角螺丝将四号车板和左右侧边偏接起来
用2颗M3*8内六角螺丝将二号车板和左右侧边偏接起来
注意:为了使led灯能够向前照射,二号车板与左右侧边之间只需要固定一颗螺丝即可。
用4颗M3*8内六角螺丝将三号车板和左右侧边偏接起来
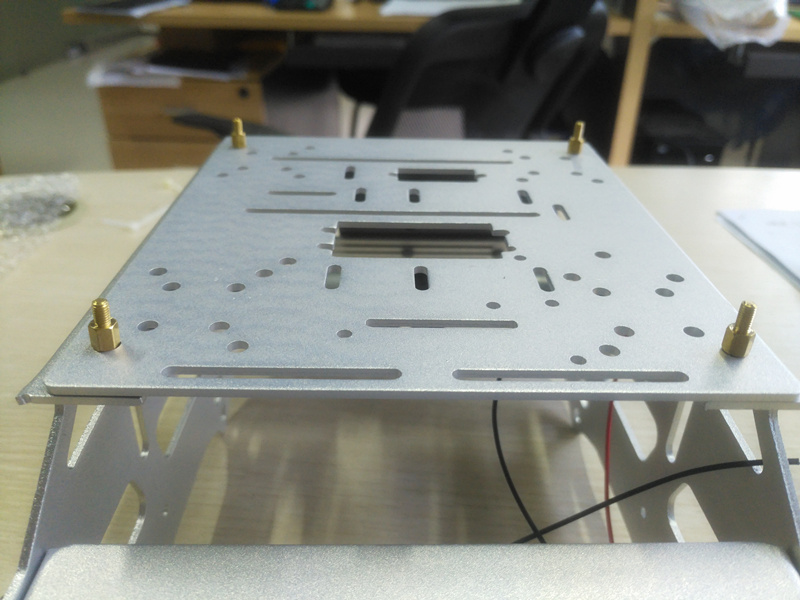
用4颗M3*6+6铜柱以及4颗M3*8内六角螺丝将五号车板固定在侧板上
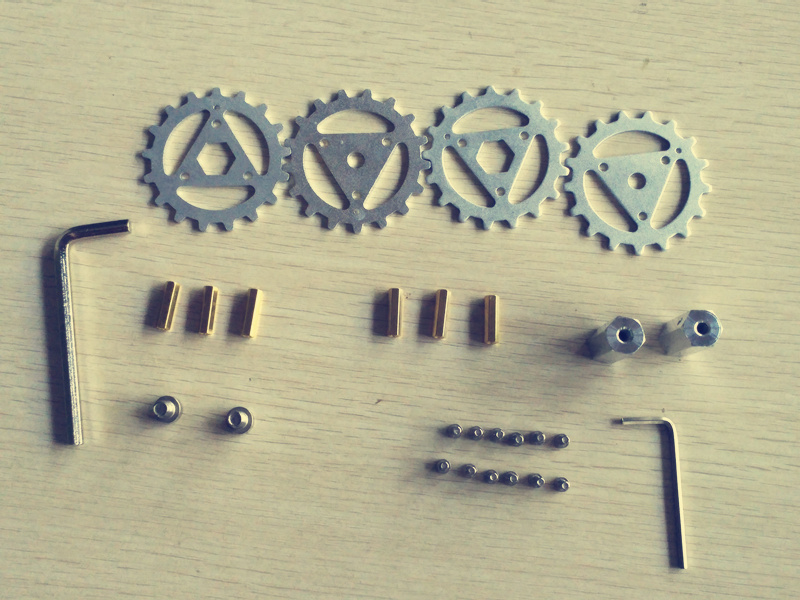
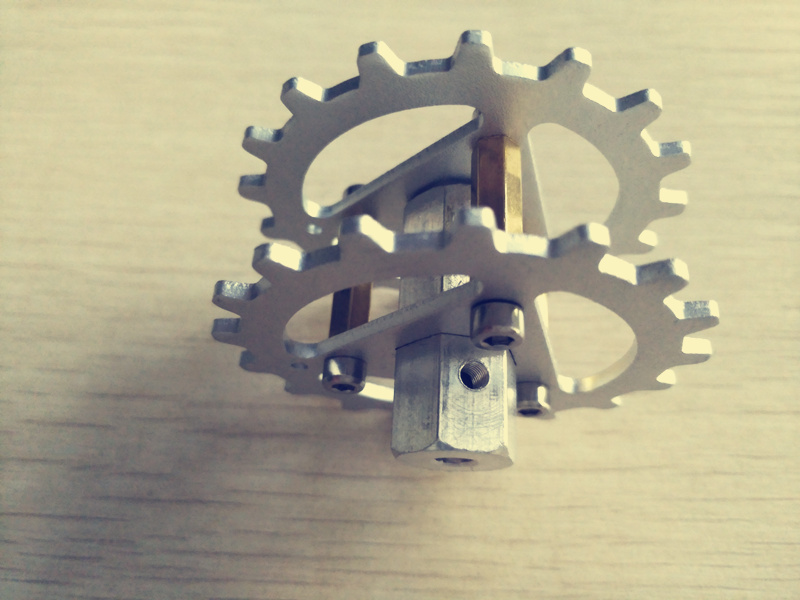
6.驱动轮安装
驱动轮所用器件
轮片 x4
M3*17双通铜柱 x6
M3*8 螺丝 x12
M6*10 x2
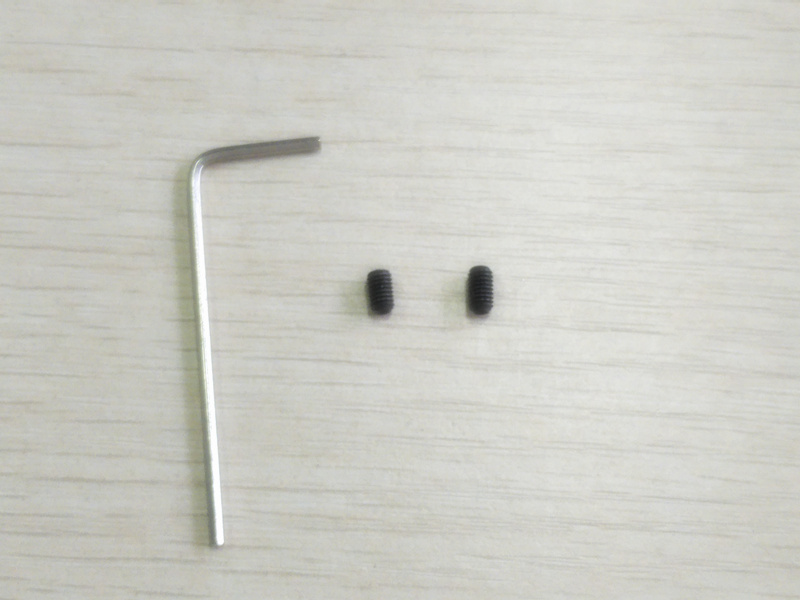
M3内六角扳手
M6内六角扳手
将铜柱与轮片用M3*8螺丝固定
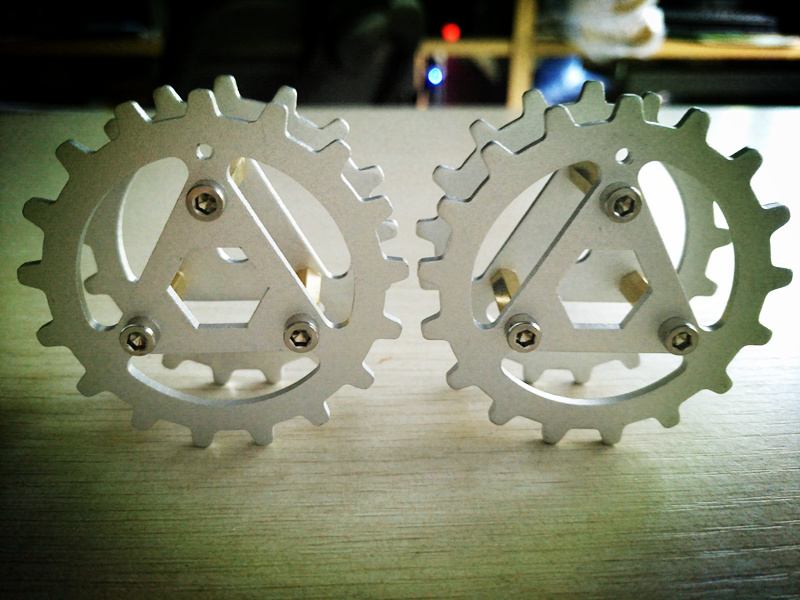
注意:亮轮片孔位必须对其
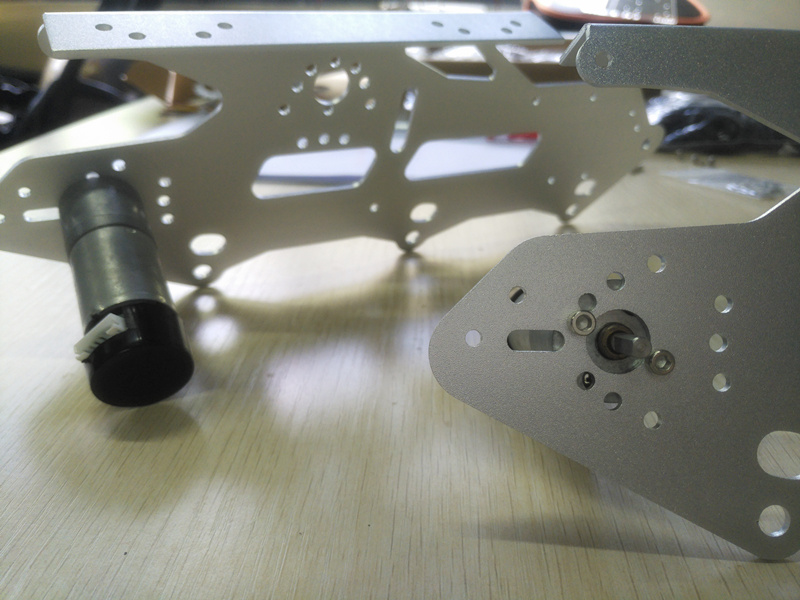
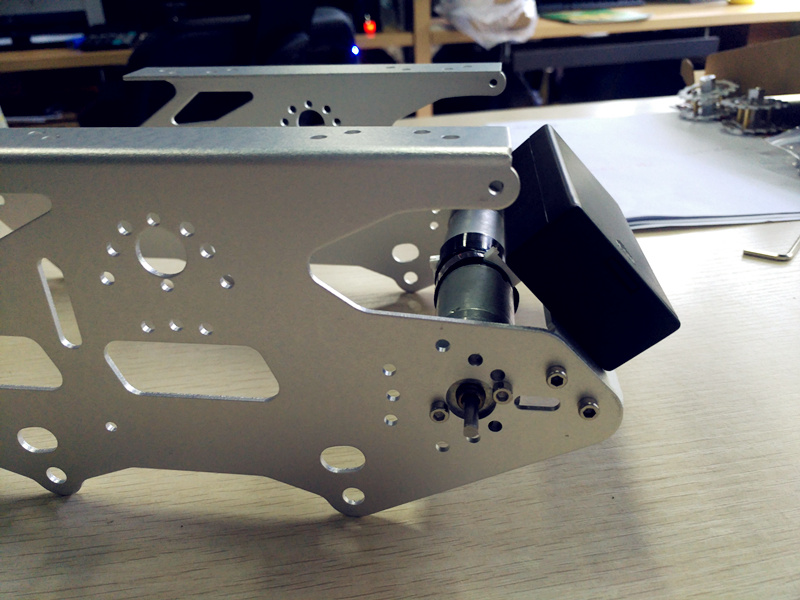
将联轴器插入驱动轮中,使联轴器上有螺丝孔一端靠近正六边形一侧,另一侧用M6*10螺丝固定

将驱动轮联轴器套在电机轴上,注意联轴器上的小螺丝孔对准电机轴凹槽,用黑色小螺丝将联轴器和电机轴固定
7.安装承重轮
将轴承卡在塑料轮子中,用M6长螺丝穿过螺丝孔中,另一端固定在侧板用M6螺帽固定在侧板上,用M6内六角扳手和M6扳手将螺丝拧紧。


8.安装履带
履带长度可以随意偏接,本款坦克小车约需要70节履带即可,安装履带时候需要注意驱动轮和承重轮对其。(这里最好加一个拆装履带的动态图)
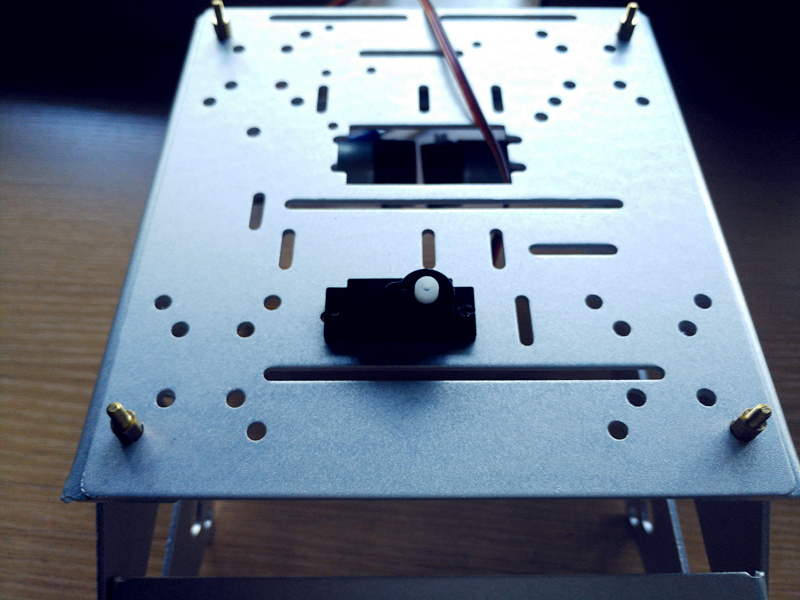
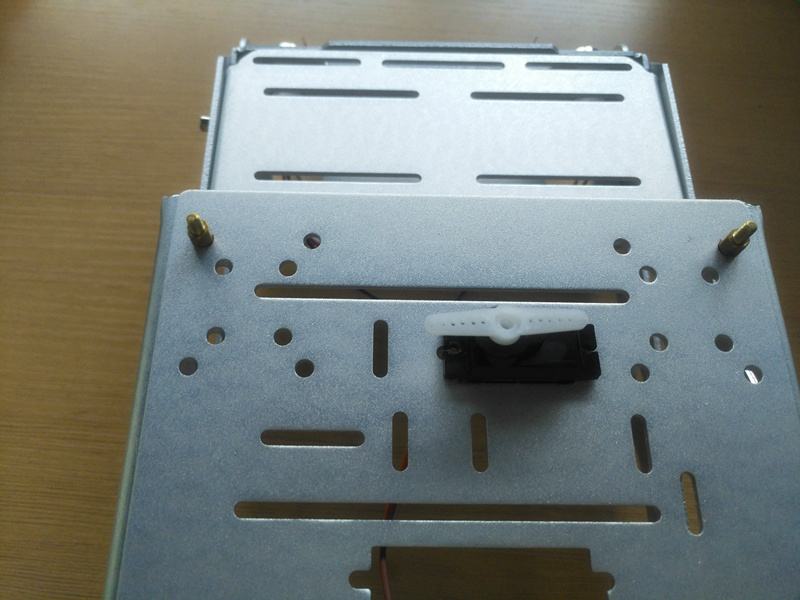
9.安装舵机
用两颗M2.5*8十字螺丝和螺帽将舵机固定在金属面板上。
10.安装亚克力
我们将所有控制电路板和一些传感器安装在亚克力面板上,一来避免了直接安装在金属底盘上大致电路板短路问题,二来解决了金属面板螺丝孔位与电路板螺丝孔位不兼容问题,亚克力面板还能兼容更多主板类型,亚克力面板兼容arduino UNO、Mega 2560、raspberry Pi三块常用开源主板螺丝孔位。用M3*10螺丝和螺帽将arduino uno,L298N,电压表,蜂鸣器亚克力面板上上,用M2.5*8螺丝和螺帽将红外接收器按照图示样子安装在亚克力上。

注意:最好用PS做一张图,标明那些孔位是UNO的,那些是2560的,那些是树莓派的。
第二部分:接线
1.电机
把左右电机带接线端子的红黑线穿过金属面板中间打孔,其余的带母头杜邦线端子的4pin用尼龙扎带绑在电机上。将左边电机红黑线接到L298N的K1或K2接口;右边电机接到K3或K4接口。(要画图!)
2.ESP8266 UNO扩展板
将ESP8266 UNO扩展板插到arduino uno板上,ESP8266 uno扩展板引出了UNO的所有GPIO口,可以作为UNO的扩展板使用,同时,扩展板与UNO之间可以通过UART通讯,可以间接地使UNO拥有上网功能,即ESP8266 扩展板又是一个串口转wifi模块。

3.L298N
L298N是电机驱动板,能接4路直流电机,板上引出了5V输出口和12V输出口
| L298N |
ESP8266 UNO SHIELD |
| IN1 |
D8 |
| IN2 |
D9 |
| IN3 |
D10 |
| IN4 |
D12 |
| ENA |
D5 |
| ENB |
D6 |
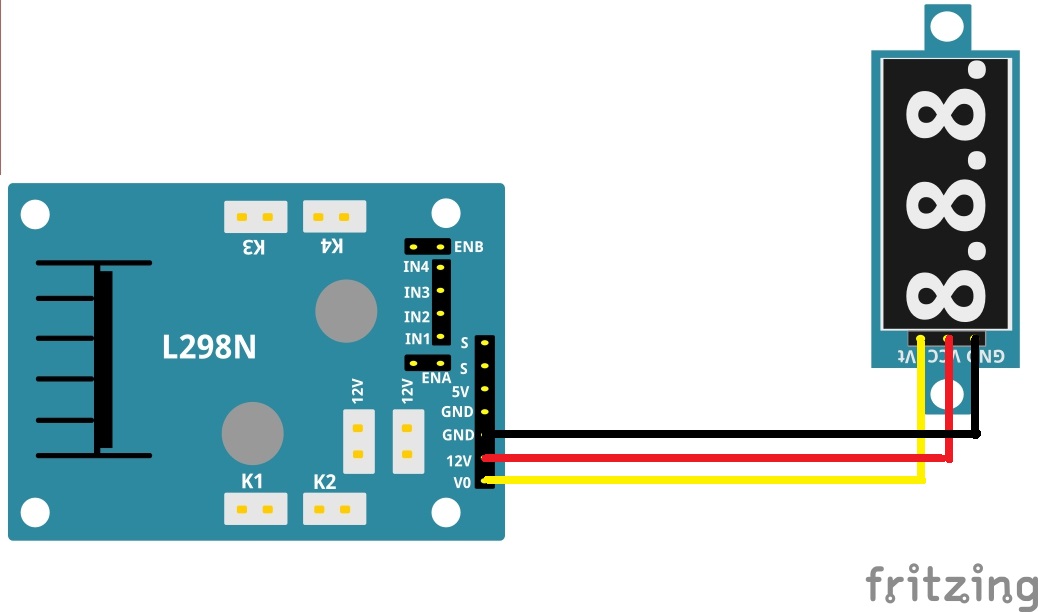
4.电压表
| L298N |
电压表 |
| GND |
GND |
| VCC |
12V |
| Vd |
V0 |
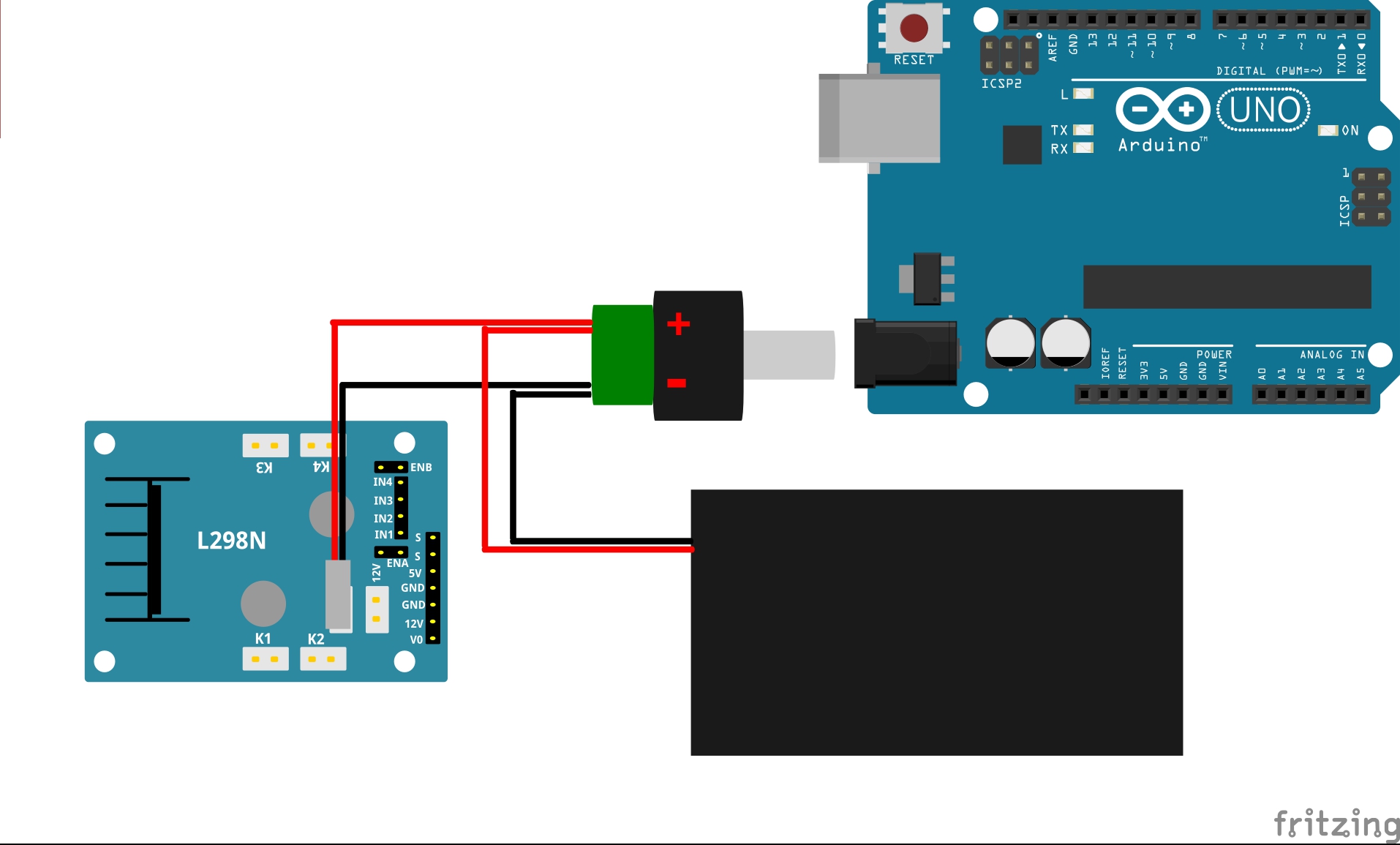
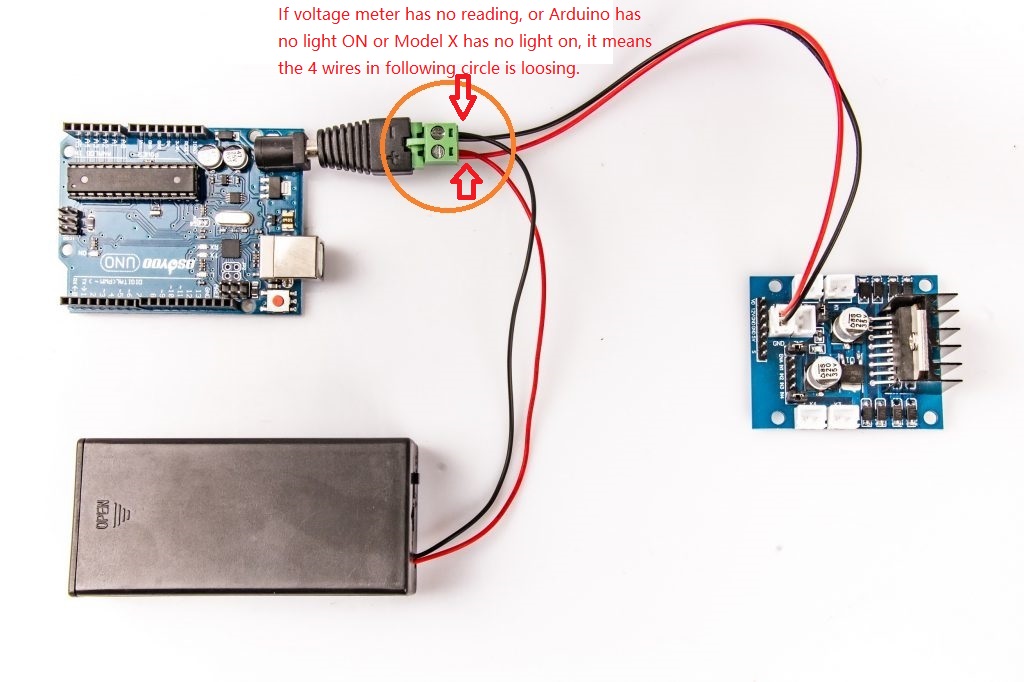
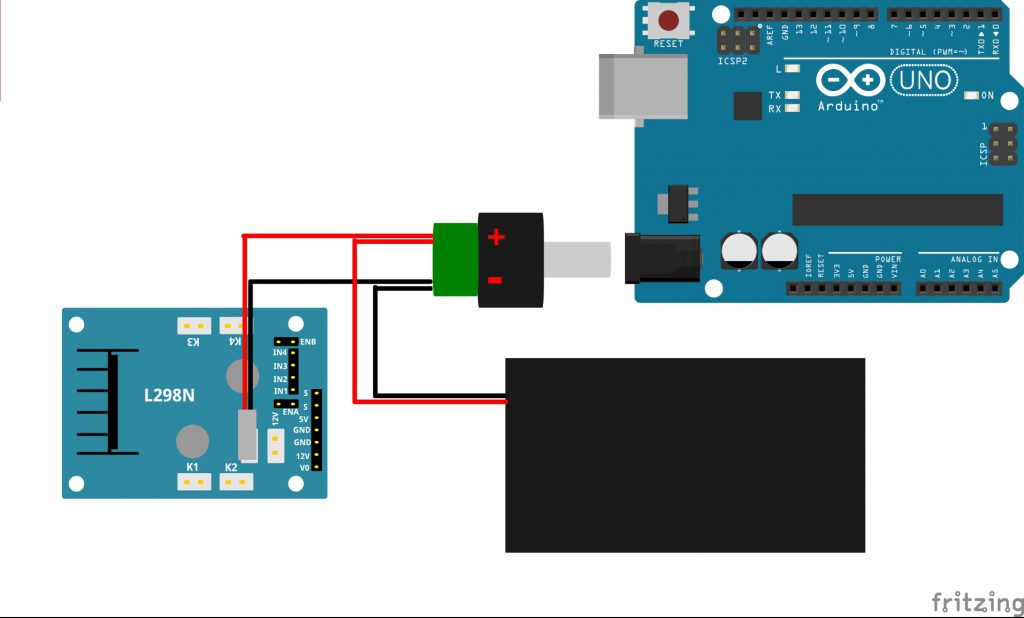
5.电源
坦克小车通过2节18650电池供电,将18650电池放到电池盒中(注意方向),将电池盒,uno,L298N按照图示接线。
6.循迹
| ESP8266 UNO SHIELD |
左循迹 |
| 5V |
VCC |
| GND |
GND |
| A0 |
DO |
| ESP8266 UNO SHIELD |
右循迹 |
| 5V |
VCC |
| GND |
GND |
| A1 |
DO |
7.蜂鸣器
| ESP8266 UNO SHIELD |
蜂鸣器 |
| 5V |
VCC |
| GND |
GND |
| D7 |
IO |
8.红外接收器
| ESP8266 UNO SHIELD |
红外接收器 |
| 5V |
VCC |
| GND |
GND |
| D13 |
S |
9.LED
10.舵机
舵机有三条线,分别为VCC、GND、S,电机再转动瞬间会把电压拉的比较低,为了不影响arduino uno正常工作,将舵机电源L298N上的5V输出供电,同时将控制信号引到L298N上
| 舵机 |
L298N |
ESP8266 UNO SHIELD |
| GND |
GND |
|
| VCC |
5V |
|
| S |
S |
D11 |
ESP8266 UNO扩展板与uno之间通过UART连接通讯,将ESP8266 UNO扩展板上2位拨码开关拨到”12″位置,使ESP8266 UNO扩展板与uno断开连接,向arduino uno中烧录一个程序使舵机转到90度位置。
11.超声波
取出舵机配套的一字叶片,按照图示样子套在舵机旋转轴上
然后将L型超声波支架用M2自攻螺丝固定在叶片上。超声波模块有4pin,分别是VCC、Trig、Echo、GND,按照下表接线
| ESP8266 UNO SHIELD |
超声波模块 |
| 5V |
VCC |
| GND |
GND |
| A2 |
Trig |
| A3 |
Echo |
12.测试
下载https://osoyoo.com/driver/tank_robot_lesson1.zip,解压文件并烧录到arduino中,在进行测试之前,先调节一下循迹传感器的灵敏度。在白色地板上贴一条10mm左右的黑色电工胶,把坦克小车上的2个循迹传感器放在黑色电工胶上,用十字螺丝刀调节可调电位器,使循迹模块信号指示灯刚好熄灭,再将循迹传感器离开黑色区域,使信号指示灯刚好亮起,这表示循迹传感器灵敏度调节好了。
用usb线将坦克小车和pc连接起来,打开电池盒开关打开arduino IDE的Serial Monitor将波特率设置为9600,Serial Monitor会向终端打印出如下信息:
welcome to use osoyoo tank robot car…
send :test line follow sensor
send :turn on LED
send :turn off LED
send : test servo
send : test HC-SR04
send : test buzzer
send : test robot go ahead
send : test robot go back
send : test robot stop
—————————————————>>
串口发送”line follow”会测试循迹传感器,终端将会打印出是2个循迹传感器是否在黑线上;
串口发送”led on”会打开LED;
串口发送”led off”会关闭LED;
串口发送”servo”会使servo旋转,舵机会从0度转到180度,再从180度转到0度,最后回到90度;
串口发送”hc-sr04″会获取到超声波与障碍物之间的距离;
串口发送”buzzer”会使蜂鸣器响一下;
串口发送”go”会使坦克小车前进;
串口发送”back”会使坦克小车后退;
串口发送”stop”会使坦克小车停止;
用遥控器对着红外接收器按遥控器上按键,终端会打印出每个按键的红外编码。
至于详细原理在后面的课程中会详细讲解。