Introduction:
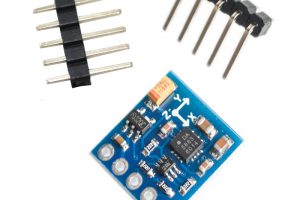
3-Axis Compass module, I2C based QMC5883 digital compass. This ASIC is equipped with high resolution magneto-resistive sensors and a 16-bit ADC. It provides compass heading accuracy up to 1° to 2°. Signal conditioning like amplification, automatic degaussing strap drivers and offset cancellation are inbuilt. User can connect any 3.3V to 5V DC power supply.
Features:
- I2C interface
- Compatible with 3.3V-5.0V voltage level
- Max 200Hz output rate
- High heading accuracy
Usage:
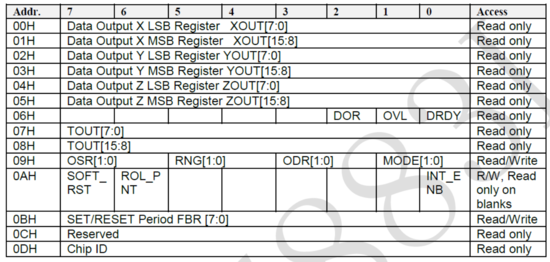
Below is a register map that might help you understand what you can get from this module. There are totally 14 registers provided by QMC5883L. Two Control Registers decide the working mode of the device, they come with address “09H” and “0AH”. Most of the remaining registers are read only data output registers, status register and identification registers.
In this example we will make the module output the heading angle between South and this module.
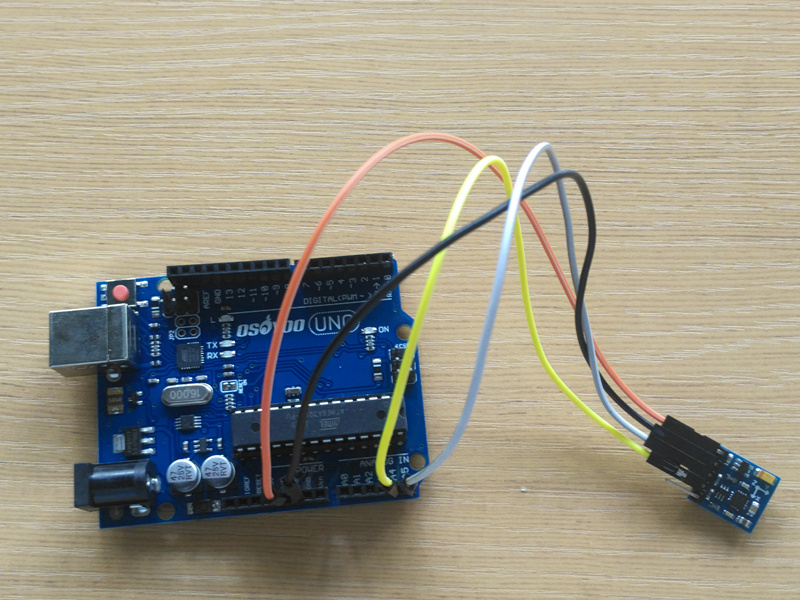
- Connect the QMC5883L Electronic Compass to Arduino via the I2C port. Make sure the QMC5883L module is horizontal。
- Download the library file: QMC5883L Compass library .Unzip it into the libraries file of Arduino IDE by the path: ..\arduino-1.x.x\libraries.
- Open the demo by the path:File -> Example ->DFRobot_QMC5883\QMC5883_compass
- Upload the Code.
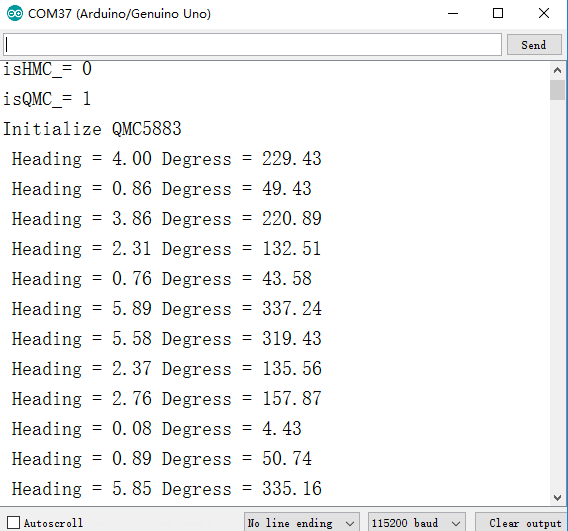
- Check the output result by opening the serial monitor.
Resources:









{kind=link}
Hi
I tried this and i get
isHMC_= 0
isQMC_= 0
Could not find a valid QMC5883 sensor, check wiring!
Forgot to mention
I2C Scanner reports 0x0C as address.
Is this right?