Authorized Online Retailers
>
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
 |
 |
 |
 |
 |
 |

Objective
In this lesson, we will install the most important framework in the smart car and make car to do some simple movements as per our python sample code. If you have passed the test movement of this lesson, that means Arduino, voltage meter,motor drive module(Model-PI), motors, batteries,chassis and wire connections between these parts are all functioning well.
As your experiments in future lessons are all based on frame work of Lesson One, it is very important to test the installation and sample code in this Lesson properly.
Hardware Installation
Video intutorial for Hardware Installation
STEP1. Install raspberry pi board,model pi driver board and 16 Channel 12-bit PWM compatible module as follows.

STEP2:Install the Voltage Meter,Webcam and 5 tracking sensors as follows.

STEP3:Connect the electronic parts as follows:
(1)Connect right and left motors to K1 and K3 sockets in model pi driver board.

(2)Connect voltage meter and battery box to model pi driver board as follows.

(3)Connect 16 Channel 12-bit PWM compatible module to model pi driver board as follows.

(4)Connect right and left LED ligth to 16 Channel 12-bit PWM compatible module as follows.

(5)Connect raspberry pi board to 16 Channel 12-bit PWM compatible module as follows.

(6)Connect 5 tracking sensors to 16 Channel 12-bit PWM compatible module as follows.
II.Software Installation
Software Preparation:
Imager utility: Win32DiskImager utility
OS: Raspbian (Use OS Raspbian 2018-04-18 in the subsequent tutorials)
Format Tool: SDFormatter (Optional)
SSH Tool: PuTTY (for Windows users)
Step 1:Before connect to Raspberry Pi, you need to install Raspbian Operation System(OS) onto SD card.
You can select the latest version of RASPBIAN system on the official website: https://downloads.raspberrypi.org/raspbian/images/. Write the image via Win32DiskImager utility into your microSD/TF card(minimum 16G), then plug the card into the slot on your Raspberry Pi.

Step 2: Connect Wifi
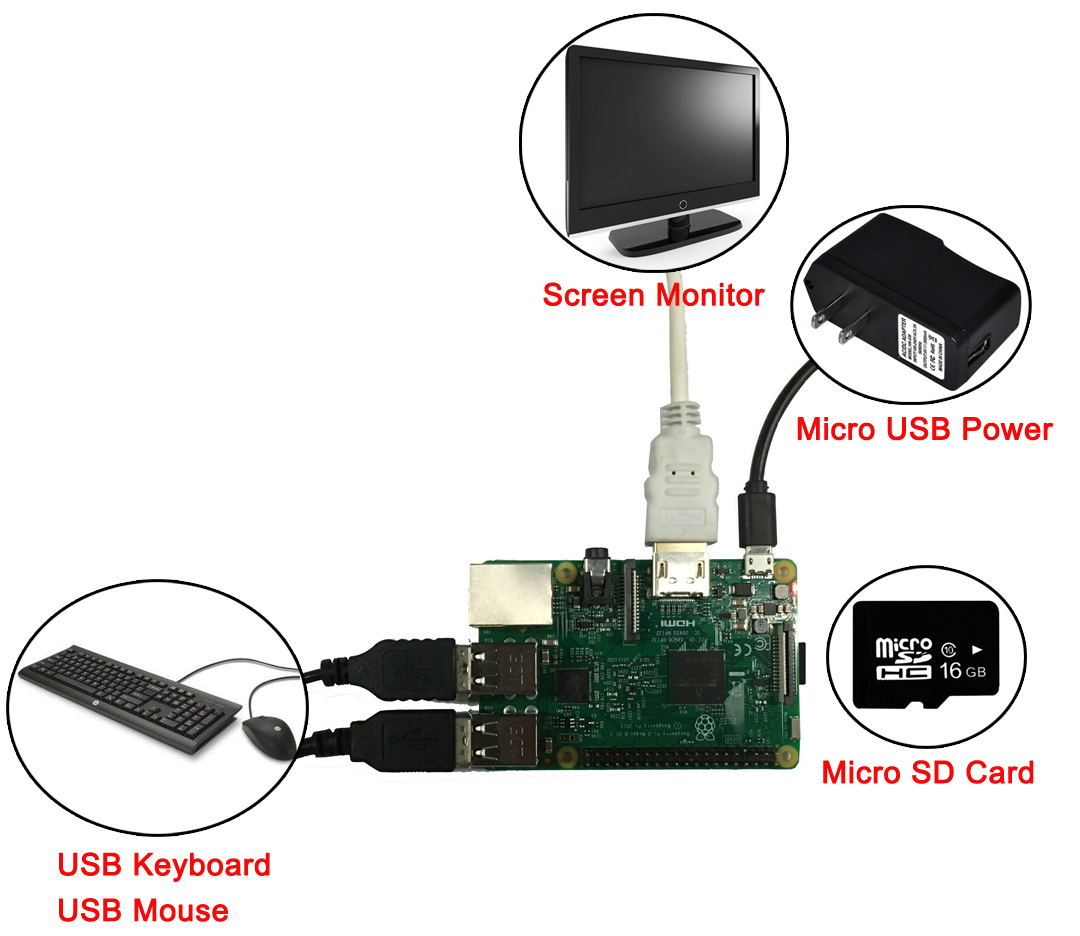
Firstly, Connect Raspberry Pi to your HDMI monitor or TV. Put a keyboard and mouse into Raspberry Pi USB ports. Insert SD card into the slot on your Raspberry Pi.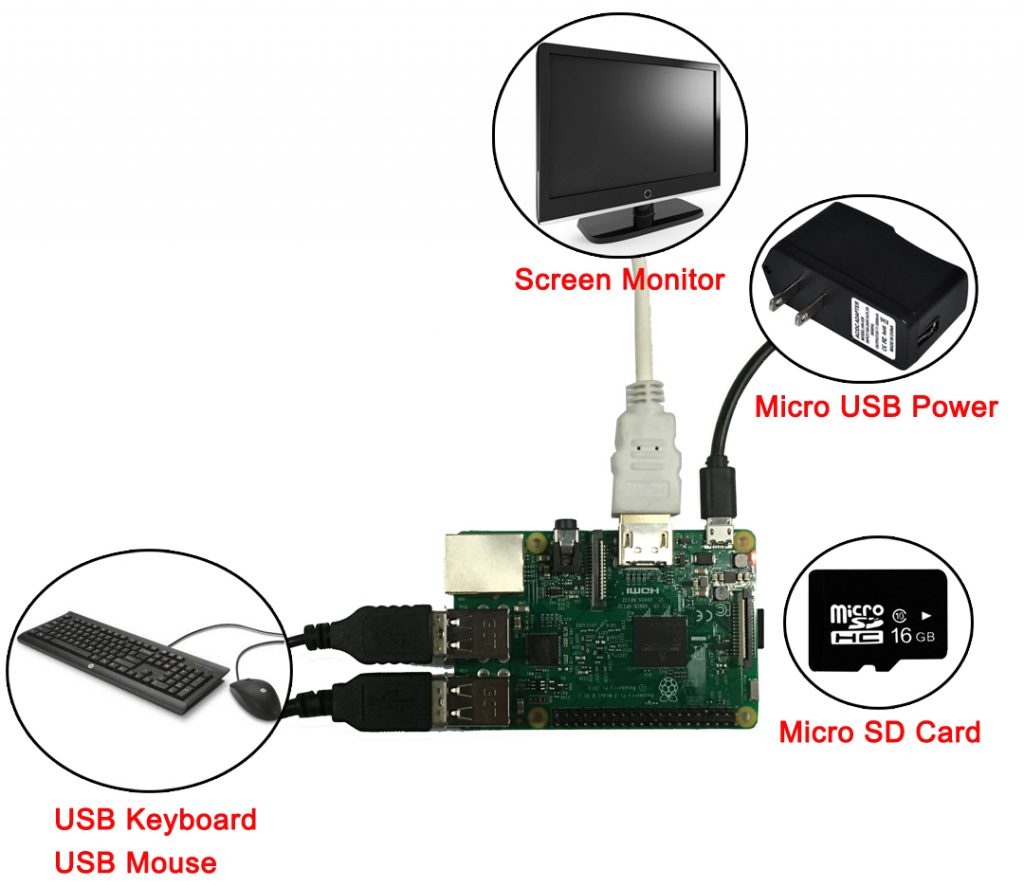 Click on the wireless icon top right on desktop, should give a list of access points, select your wifi ssid and connect it. Once your Pi is connect to Wifi, you can hover your mouse to the wifi icon to see the your IP address.
Click on the wireless icon top right on desktop, should give a list of access points, select your wifi ssid and connect it. Once your Pi is connect to Wifi, you can hover your mouse to the wifi icon to see the your IP address.
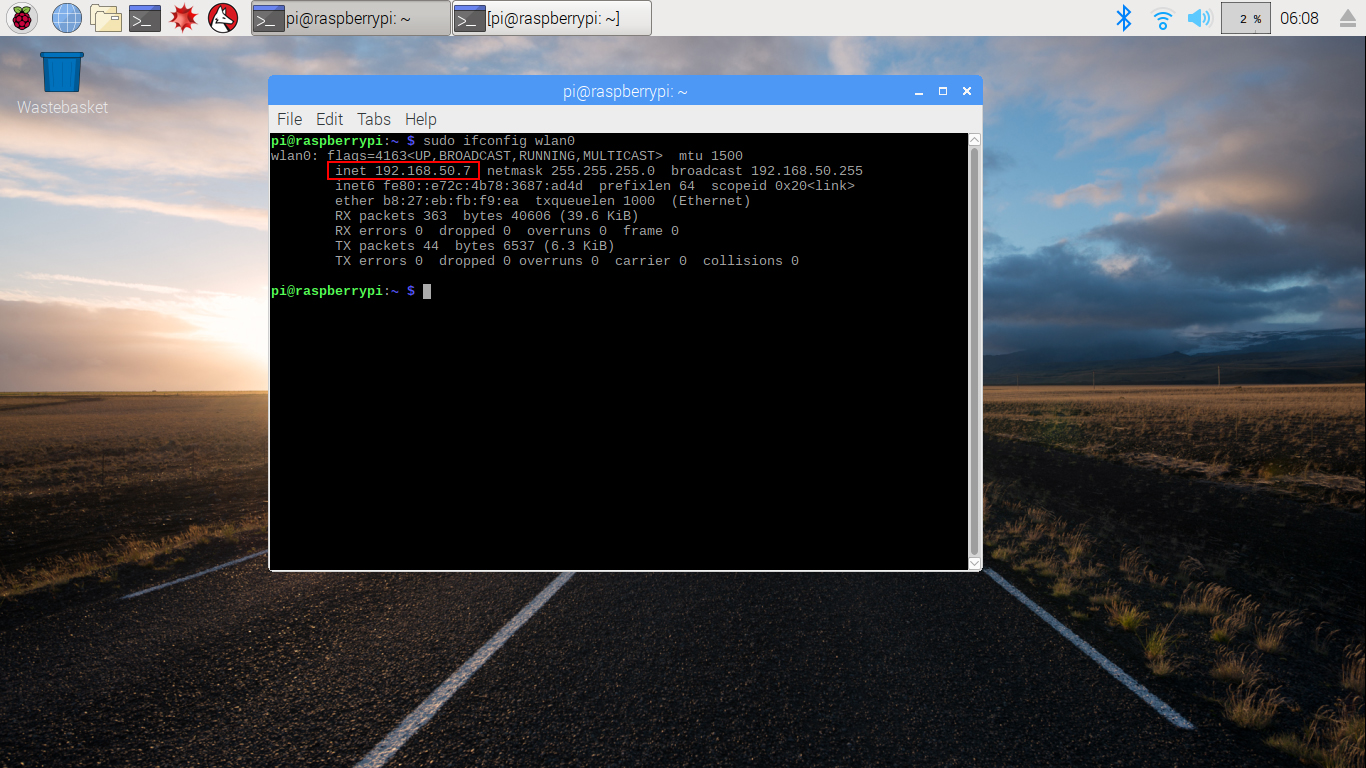
Or your can type sudo ifconfig wlan0 command in terminal. Your local ip address will show in wlan0 block(right side of the word inet addr:). It will look like 192.168……
Please remember above IP address, it will be used in our next steps.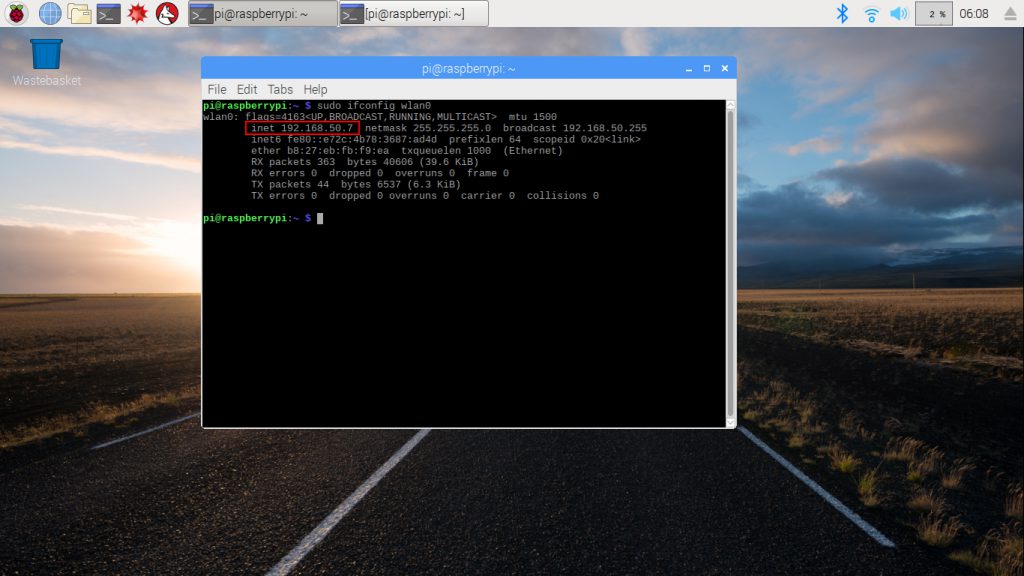
Step 3: Open SSH connection
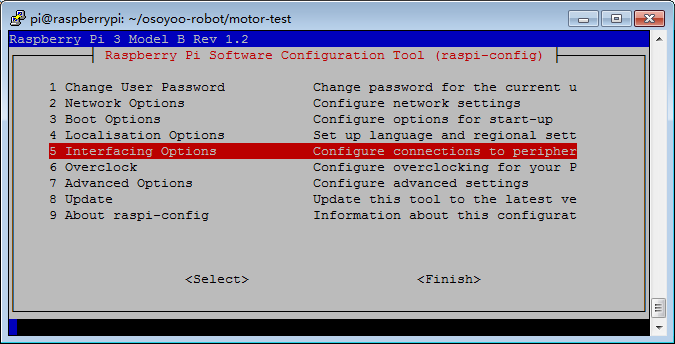
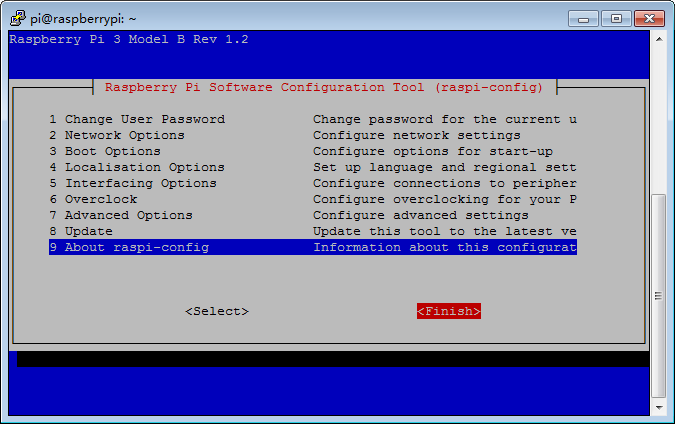
SSH enable user to type shell command remotely from internet so that we can control the car through wifi.In order to enable SSH function, we need type following command from terminal:
sudo raspi-config
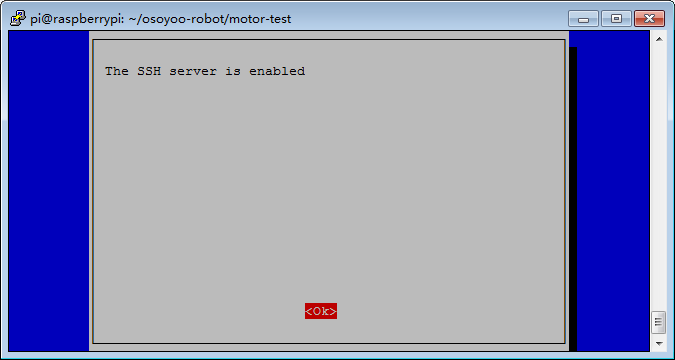
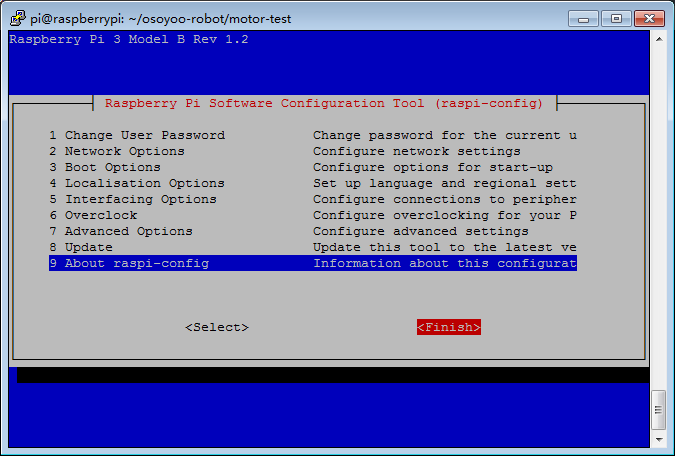
Then select Interfacing Options->SSH->Yes->Ok->Finish


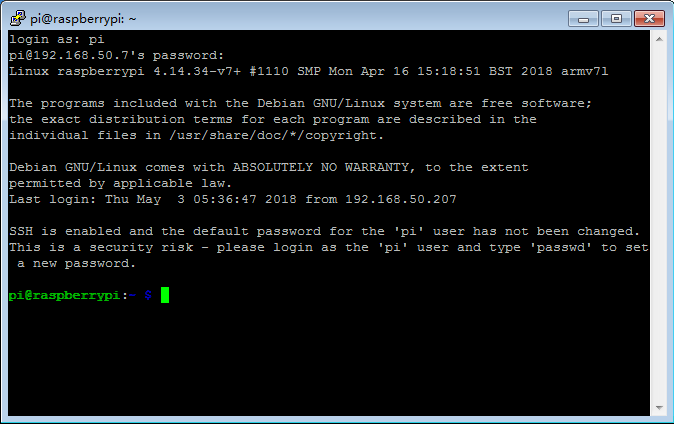
Step 4:Use SSH to connect Raspberry Pi terminal remotely
In order to make the car moving freely, we need disconnect Raspberry Pi from monitor, keyboard/mouse and use SSH to send command to Raspberry Pi terminal remotely.
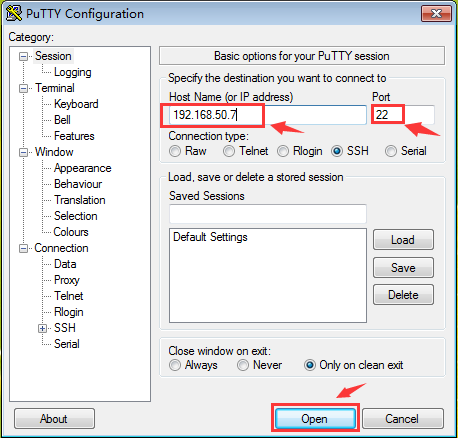
If you are using Windows to send ssh command. you need download a free software called PuTTy to connect the Raspberry Pi local IP(you got from STEP 1).
If you are using MacBook or other linux computer, please type:
ssh your_raspberry_pi_local_ip_address
*your_raspberry_pi_local_ip_address means the wifi IP address you got from STEP 1
such as :ssh [email protected]
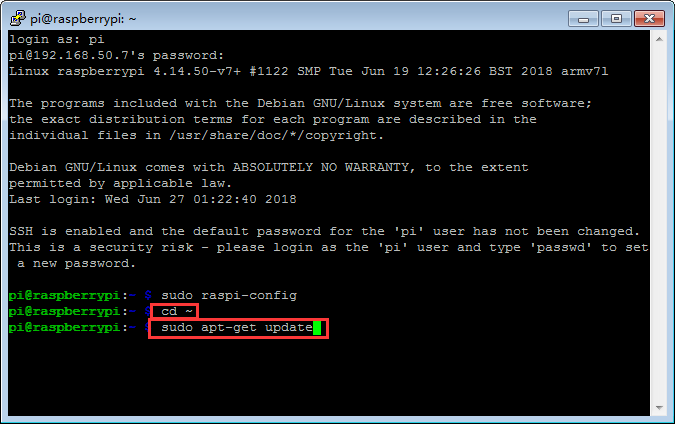
When connecting ssh, you need use default user name pi and default password raspberry to login to Raspberry Pi.
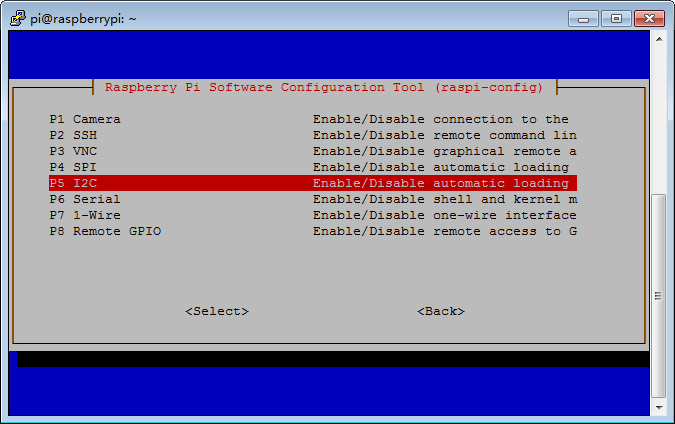
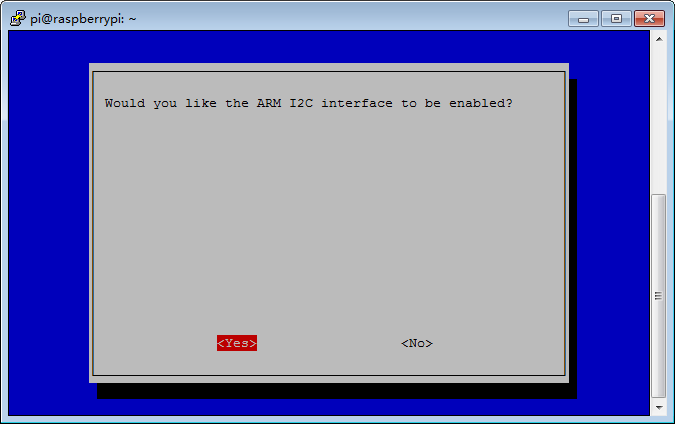
Step 5: Open I2C function
I2C is a protocol which will be used to exchange data with I2C device. In our project, I2C device is PCA9685 module.In order to use I2C function, we need type following command from terminal:
sudo raspi-config
Then select Interfacing Options->I2C->Yes->Ok->Finish


Step 6: Install GPIO Library
- (1)Update Rasbian Repository by typing following terminal command
cd ~
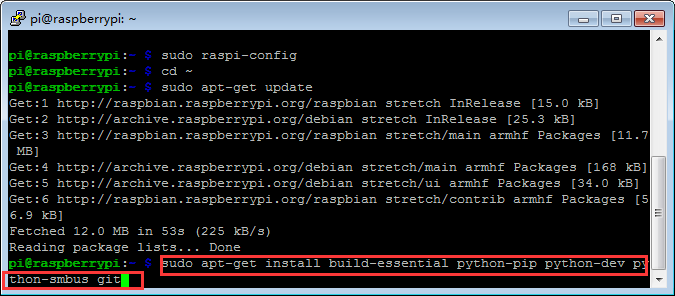
sudo apt-get update
- (2)Install python-pip , python-sumbus and github
sudo apt-get install build-essential python-pip python-dev python-smbus git
- (3)Install GPIO Library by typing following terminal command
git clone https://github.com/adafruit/Adafruit_Python_GPIO.git
cd Adafruit_Python_GPIO
sudo python setup.py install

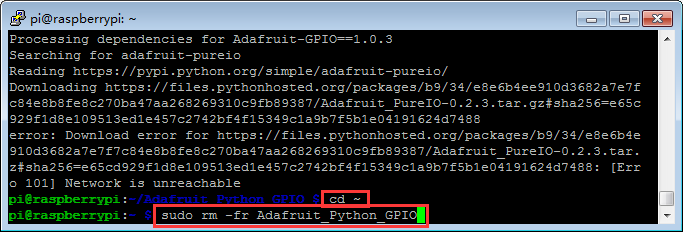
- (4)Typing following terminal command to remove installation files and save disk space
cd ~
sudo rm -fr Adafruit_Python_GPIO
Testing Previous Installation
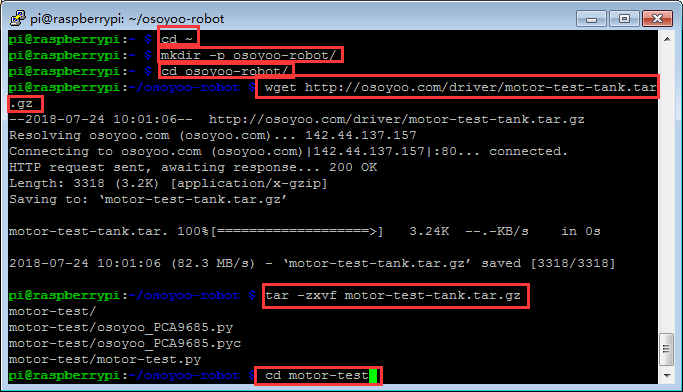
- (5)Download testing python code by typing following commands:
cd ~
mkdir osoyoo-robot/
cd osoyoo-robot/
wget http://osoyoo.com/driver/motor-test-tank.tar.gz
tar -zxvf motor-test-tank.tar.gz
cd motor-test
Testing
Step 7: Run Testing Python code
cd ~/osoyoo-robot/motor-test
python motor-test.py
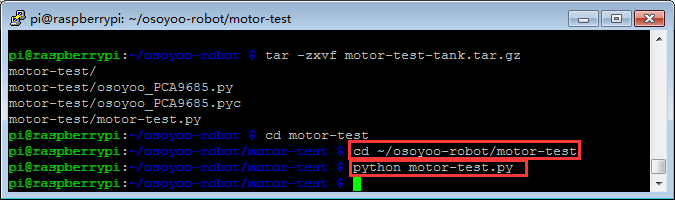
After running above python sample code, your car should move forward for 2 seconds, then move backward for 2 seconds , then turn left for 2 seconds and finally turn right for 2 seconds.
If your car does not move as per above scenario, the installation should have some problem. You need double check the wire connection and software installation as per our previous steps.