



Robot Tank Car Chassis
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
 |
 |
 |
 |
 |
 |
Robot Tank Car Electronic Parts Kit
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
|
|
|
|
|
|

In this lesson, we will install 2pcs IR Obstacle Avoidance modules on robot car and program the car to follow object movements. The principle of this experiment is based on IR detection object. The car receives the signal from the IR Obstacle Avoidance module, and then the program will drive the car to take actions.
You must complete lesson 1 (assembling the car) before you continue on with this lesson.

TR300 tank car chassis x1 +Acrylic board chassis x1
OSOYOO UNO R3 board fully compatible with Arduino x1
OSOYOO V1.3 WIFI shield x1
OSOYOO Model X motor driver x1
OSOYOO Battery box x 1
OSOYOO Voltage meter x1
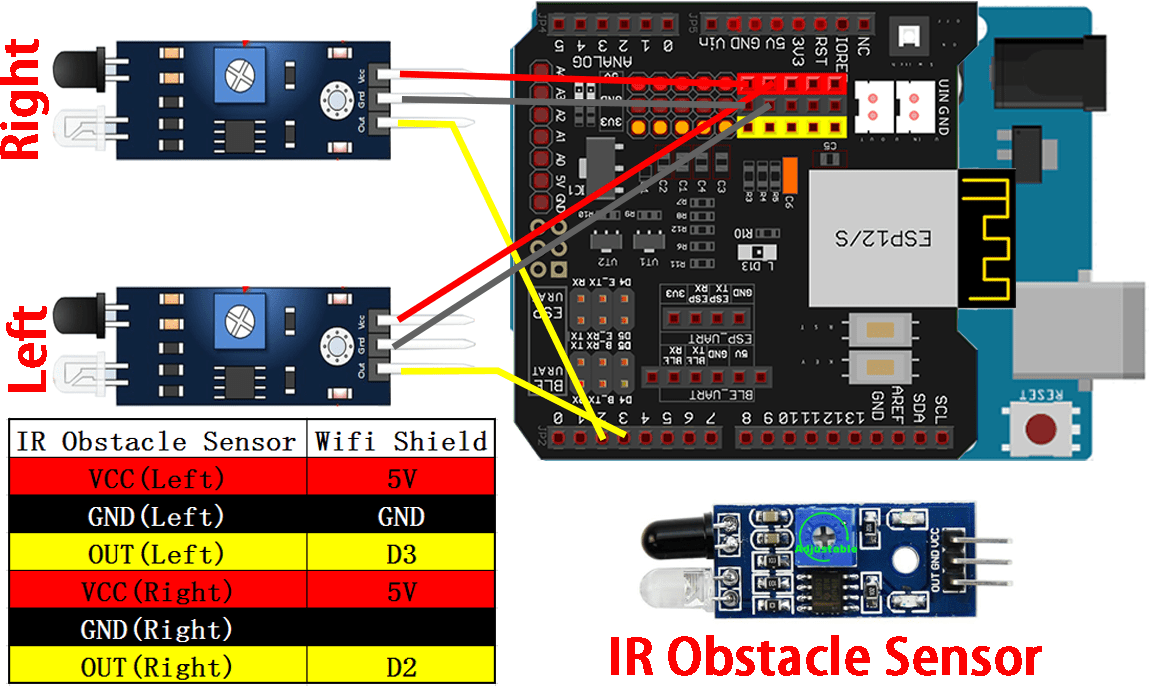
OSOYOO IR obstacle avoidance module x1
18650 batteries(3.7V) x 2
some screws and jumper wires

Step 1: Install the smart car basic frame work as per Tank car Lesson 1 . If you have already completed installation in Lesson 1 , just keep it as is.
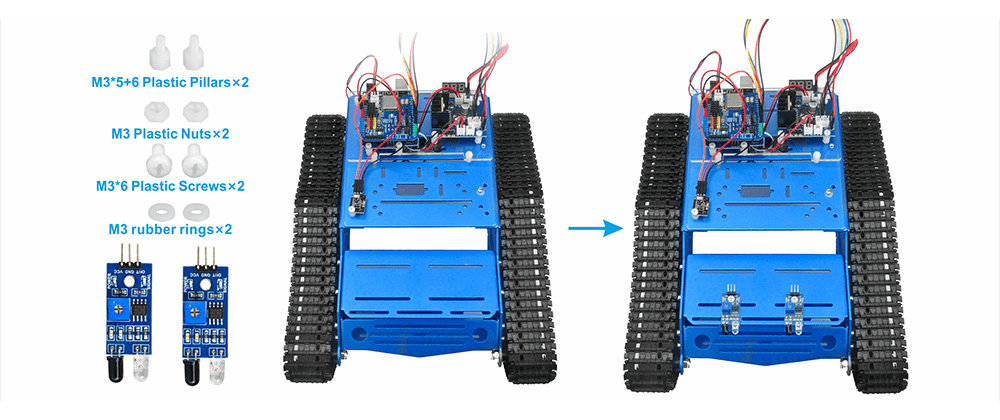
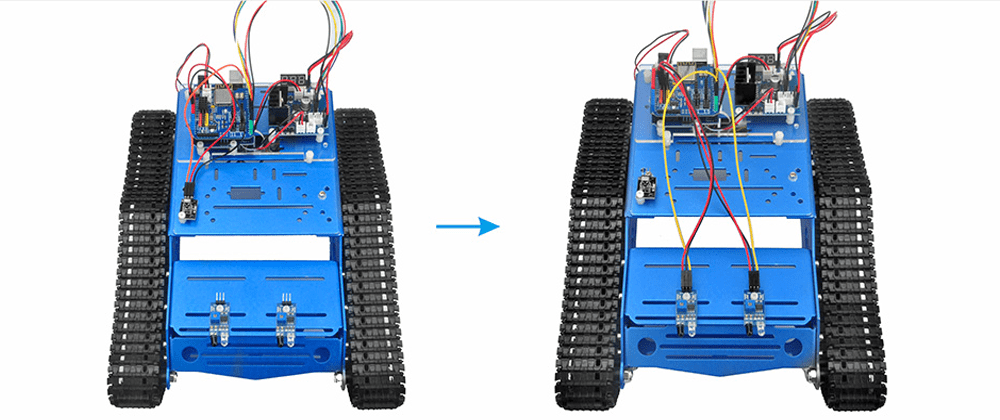
Step 2: Add 2pcs IR Obstacle Avoidance modules onto the car. Install the IR Obstacle Avoidance modules with 2pcs M3*5+6 plastic pillars, M3 plastic nuts,M3*6 plastic and M3 rubber rings at the front of chassis.’

Step 1: Install latest Arduino IDE (If you have Arduino IDE version after 1.1.16, please skip this step)Download Arduino IDe from https://www.arduino.cc/en/Main/Software?setlang=en , then install the software.
Step2 :Download Lesson One sample code from https://osoyoo.com/driver/TR300_tank/arduino_tank_carV2.0/tankcarV2.0-lesson3.zip , unzip the download zip file , you will see a folder called tankcarV2.0-lesson3.ino.
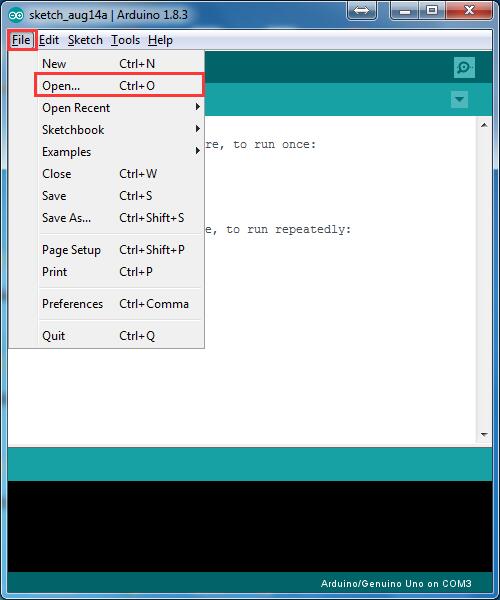
Step 3: Connect Arduino UNO to PC with USB cable, Open Arduino IDE -> click file -> click Open -> choose code tankcarV2.0-lesson3.ino” in folder, load the code into arduino.(Notice: Shut off your battery or Unplug your power adapter when upload sketch code to Arduino.)
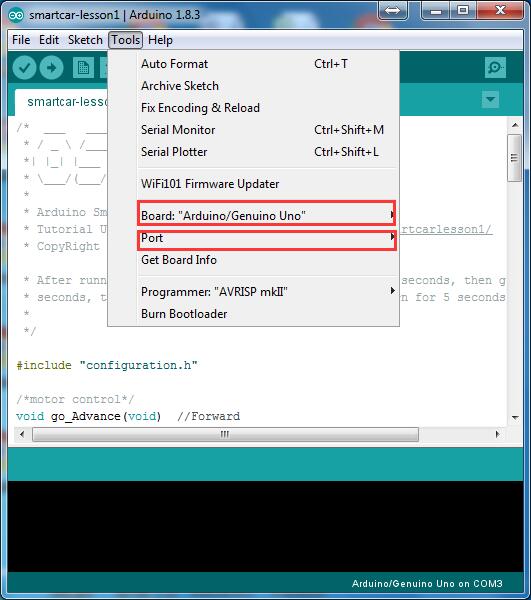
Step 4: Choose corresponding board/port for your project, upload the sketch to the board.
Step 5: Turn on the car, put object about 10cm ahead of each IR Obstacle Avoidance modules and adjust potentiometer on IR Obstacle Avoidance modules to detect object or your hand.
Note: When these module detect objects, the power indicator and signal indictor are on. when you move object over detection distance, the power indicator is on. If the signal indictor is always on even though the object is over detection distance, you also need to adjust the potentiometer

Turn on the car, move object or your hand ahead of car, and then the car will move accordingly: looks like you pull it. It goes forward when both IR Obstacle Avoidance modules detect object or your hand; it turns right when the right IR Obstacle Avoidance modules detect object; it turns left when the left IR Obstacle Avoidance modules detect object.
when object or your hand is over 10cm ahead, it will stop.
Note:
1) As IR Obstacle Avoidance modules are installed at the back of the car, all movement directions are contrary to other courses.
2) The car can only move forward, turn right and turn left, but cannot move backward.








