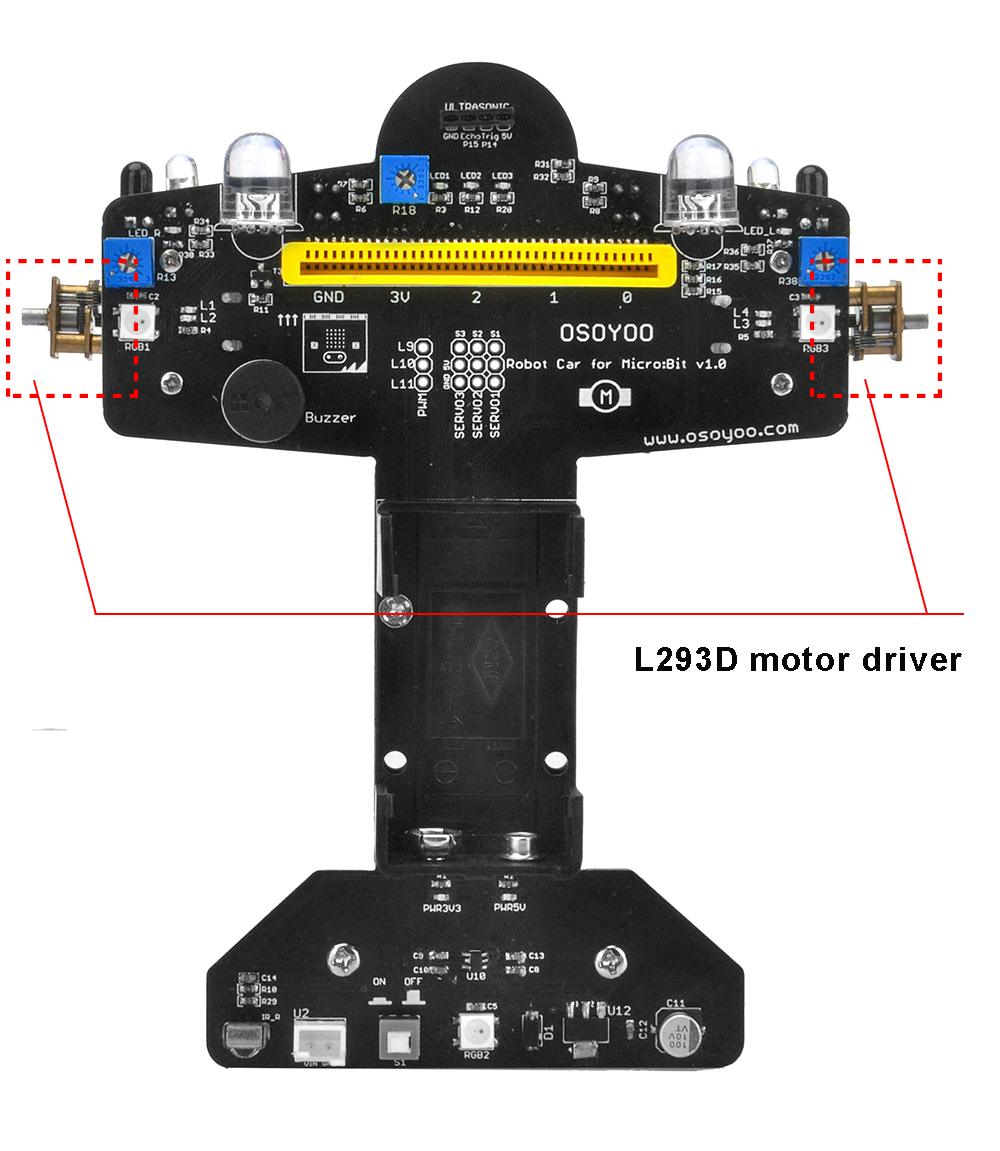
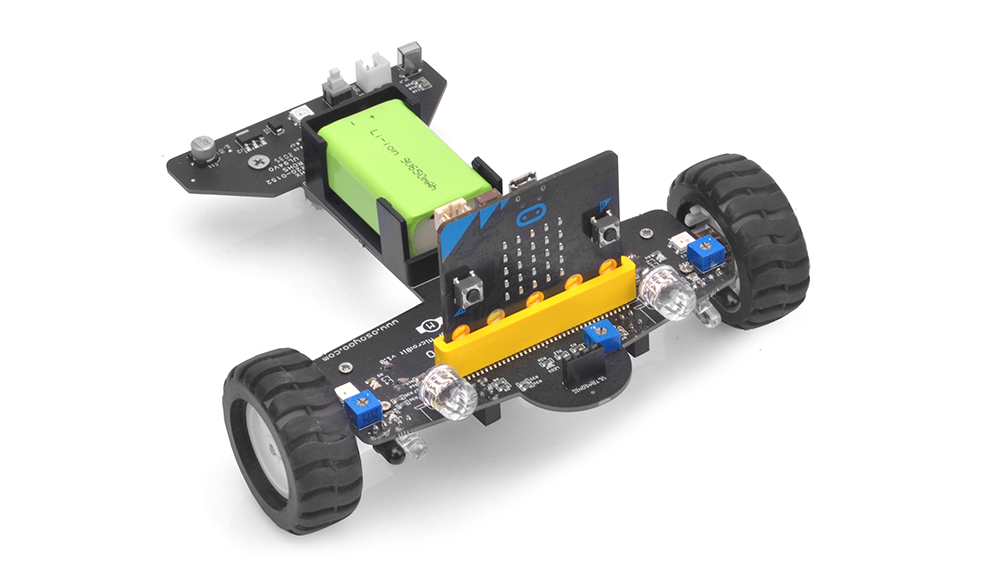
OSOYOO Robot Car for Micro Bit has a built-in L293D motor driver chip. When using, you just need to insert the micro:bit main board into the card slot, and send the test code to micro:bit main board. Insert well the 9V battery into the battery box to control the two motors rotate, thus control the micro:bit robot car move.
In this lesson, we will show how to assemble a simple robot car and use Makecode to program its movement.
● 1 x USB cable
● 1 x micro:bit board
● 1 x 9V battery
● 1 x OSOYOO Robot for Micro bit
A DC Motor is a type of electric motor that converts DC electrical power to mechanical power i.e. a DC supply is converted to rotation or movement. DC motors are one of the commonly used motors in different applications like electronic toys, power tools, portable fans, etc.
DC Motors are further classified in to different types like series, shunt and compound and each type is used in different areas of applications. Some DC motors are also used in Robotic and Industrial applications for their easy control and precision.
The DC motor (Direct Current motor) is the most common type of motor. DC motors normally have just two leads, one positive and one negative. If you connect these two leads directly to a battery, the motor will rotate. If you switch the leads, the motor will rotate in the opposite direction.
Block
Analyse
Examples
Startup items;
When dragged into this block, the program will be displayed after booting
CarCtrl items;
When dragged into this block, the program will be forward after booting.You can choose to go forward, backward, turn left, turn right by yourself.
Cycle block;
When dragged into the block, the program will always display in a loop
Matrix display; set a different matrix shape by yourself
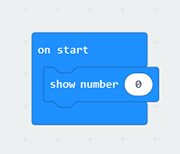
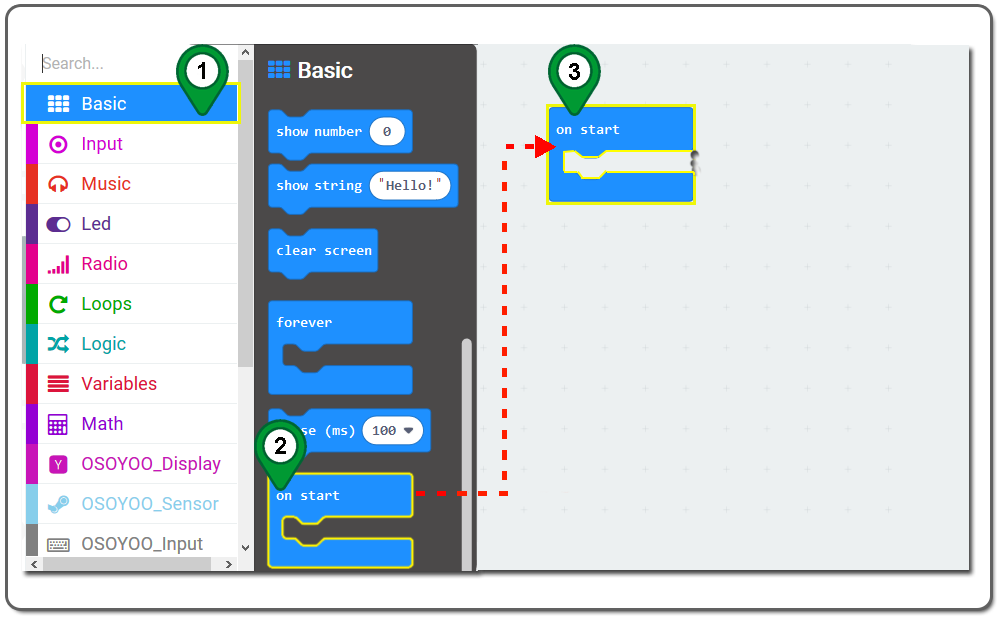
Step 1.In the Toolbox, click on the Basic category and then click the on start block , and then Drag as following figure:
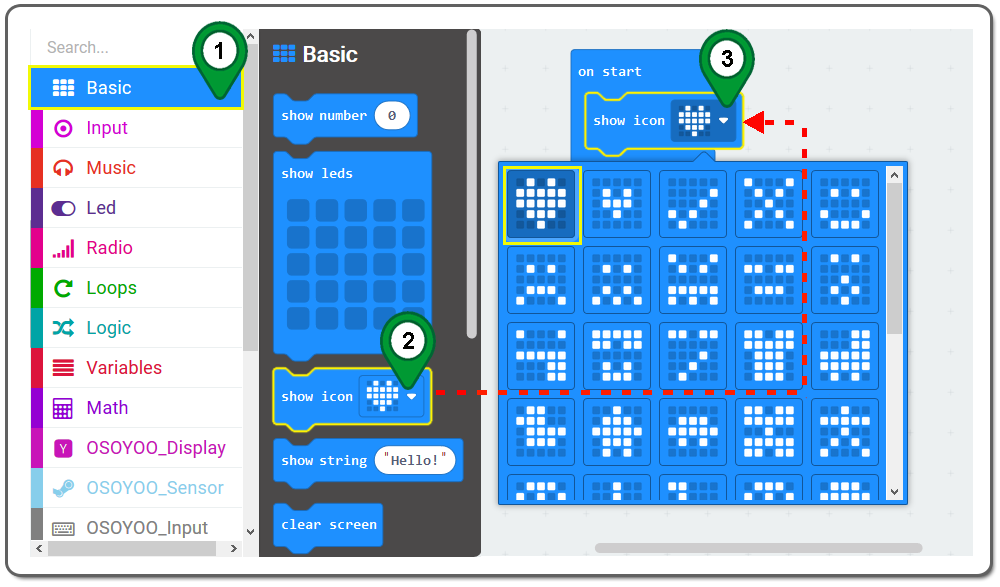
Step 2. Click on the Basic category again. Then drag the show icon block and drop it inside the on start block ,and choose the icon from the drop-down menu as following figure.
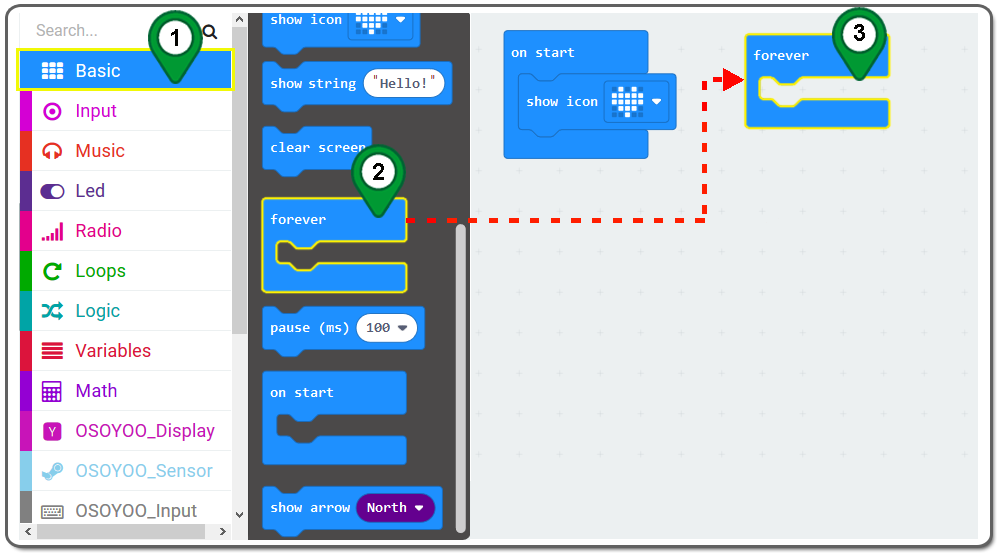
Step 3. Click on the Basic category and then click the forever block, and then Drag as following figure:
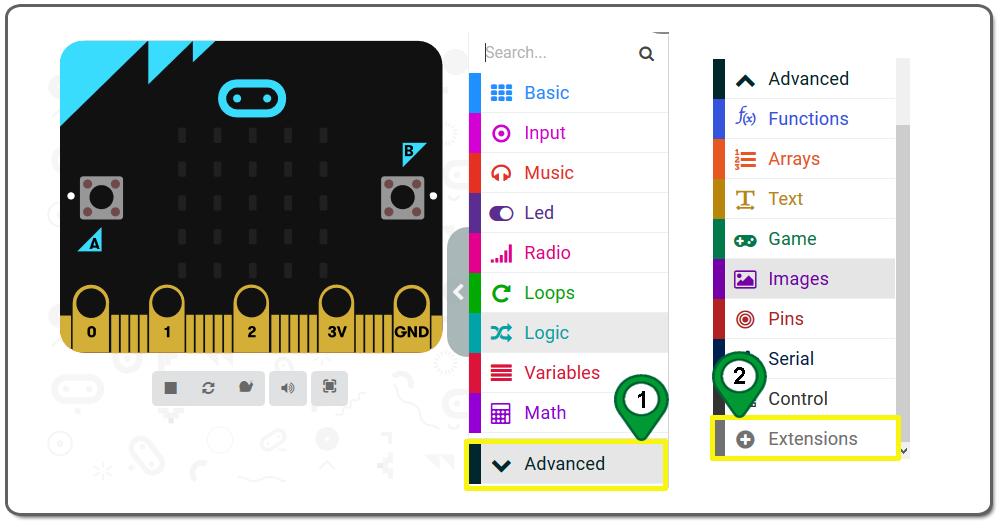
Step 4.In the Editor controls, click on the Advanced button and then Extensions as following figure.
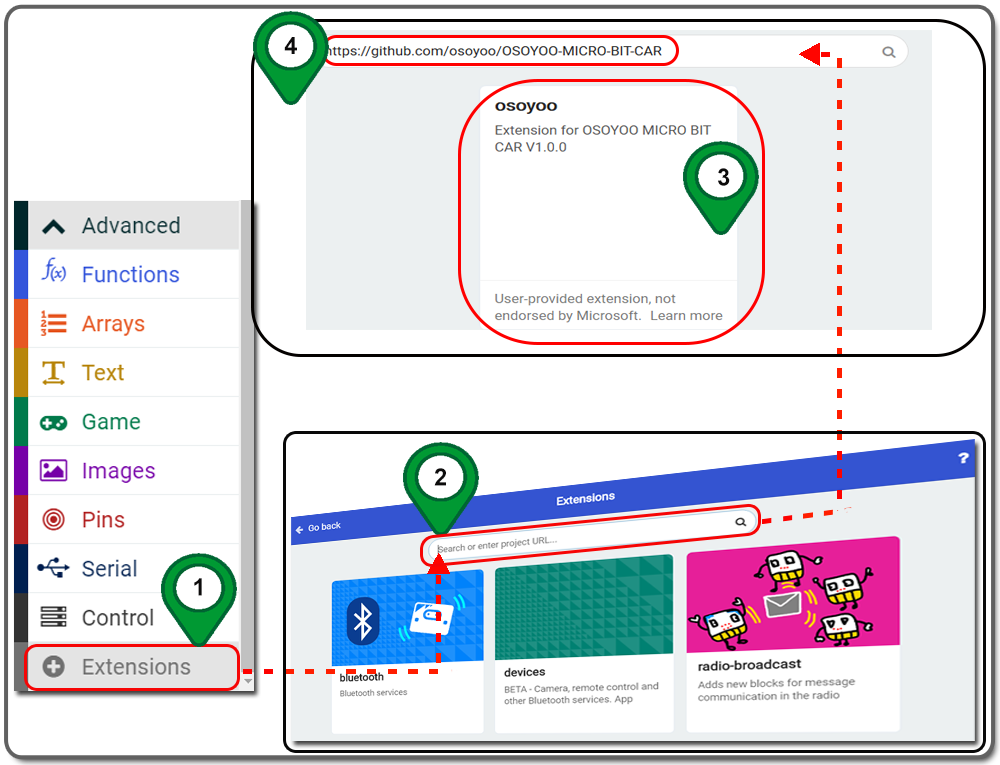
Step 5. In the Extensions page , enter project URL “https://github.com/osoyoo/OSOYOO-MICRO-BIT-CAR ” in the Search textbox and click on the Search button. The page will show you all the matching extensions based on your search string. Now, click on OSOYOO to add it into your project .
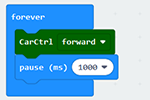
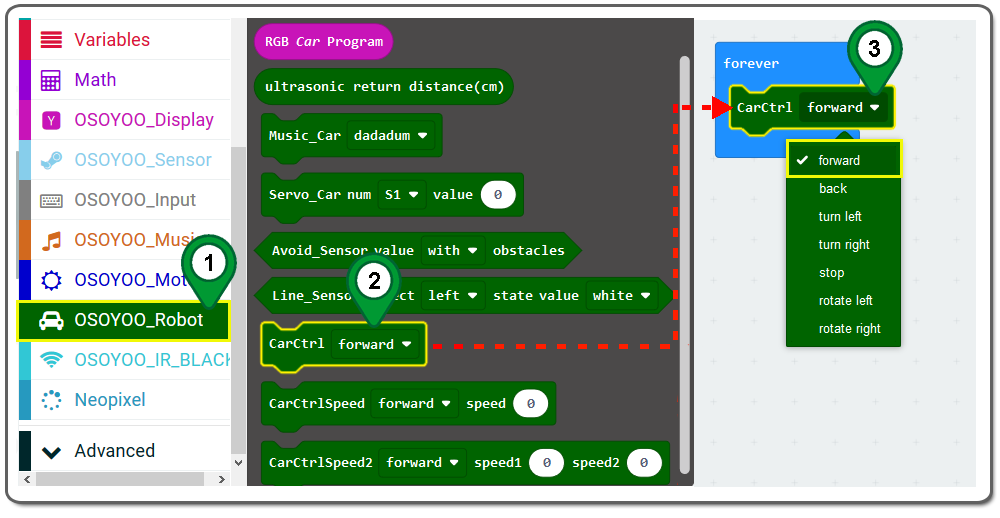
Step 6.Click on the OSOYOO_Robot category. Drag carCtrl block and place it inside the forever block,set forward from drop-down menu.
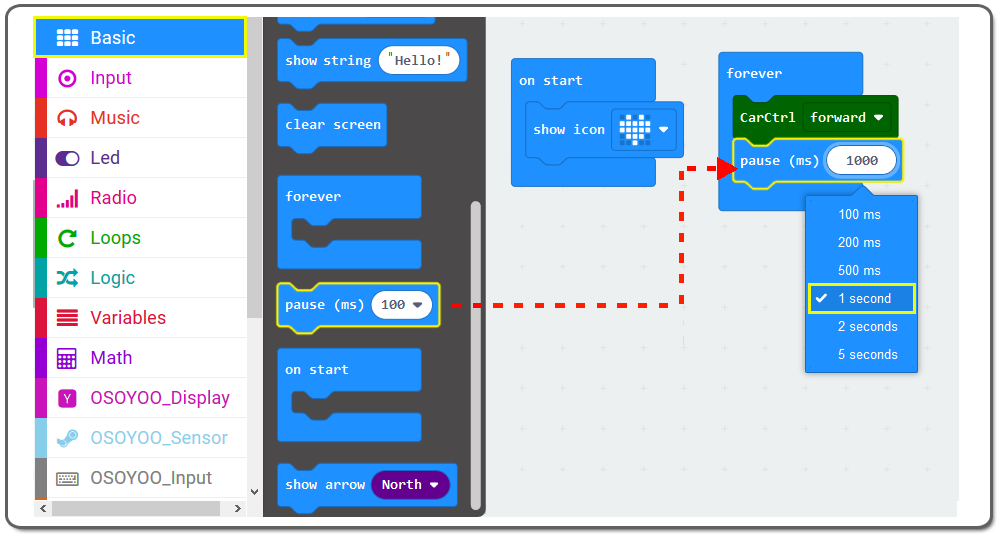
Step 7.Click on the Basic category again. Then drag the pause(ms) block and place it below CarCtrl block (inside the forever block) , and choose 1 second from the drop-down menu .
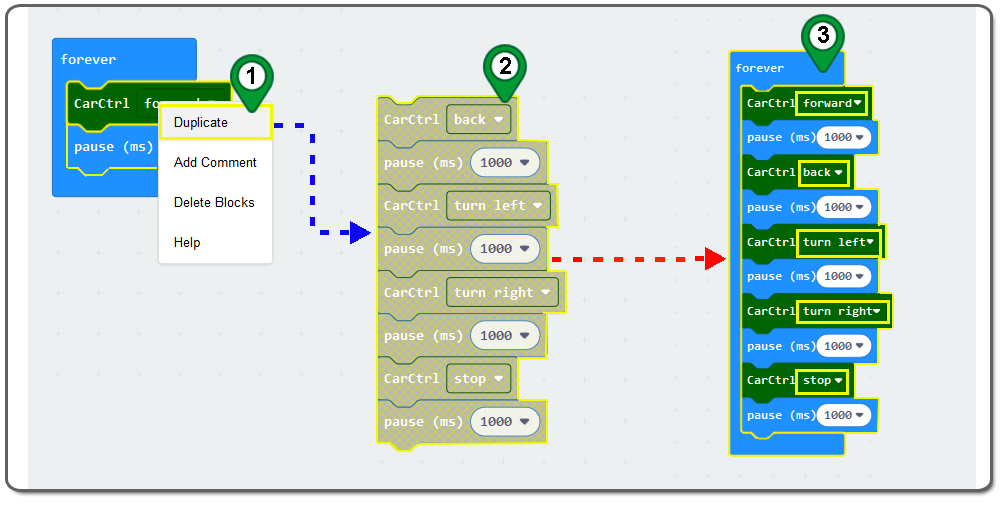
Step 8.Duplicate CarCtrl block and pause(ms)1000 block four times, drag and place them below the first PAUSE 1000 block .Change the CarCtrl block value as following figure:
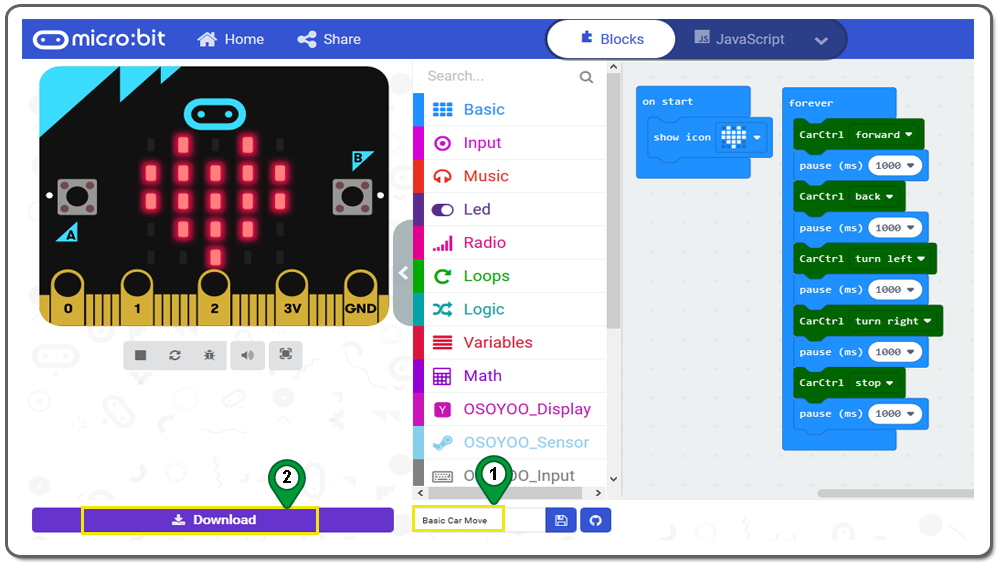
Step 9. Rename this project and download the hex file as following figure:
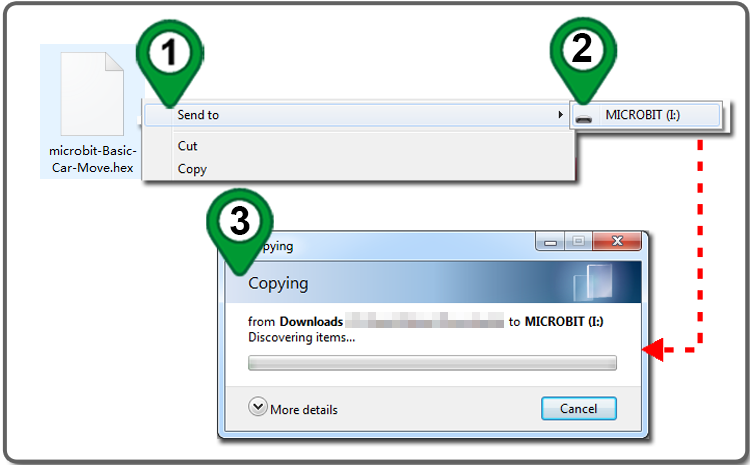
Step 10. Save it to your MICROBIT disk Driver as following figure.
If we want to adjust the time or speed of robot movement in the laboratory, we can make it by selecting the corresponding expansion modules and changing the parameters on these modules.
Step A)Connect the micro:bit with the computer through USB cable, and the computer will pop up a U disk and send the download file(.hex)to your micro:bit.
Step B)Insert the micro:bit main board into the robot, and connect a 9v battery into the battery box.
Step C)Turn the POWER switch ON. The micro:bit car will go forward for 1 second, backward for 1 second, turn left for 1 second and turn right for 1 second, stop for 1 second, repeatedly.