Schritt 1: Vor Beginn dieser Lektion musst Du Lektion 1 und Lektion 2 abgeschlossen haben.
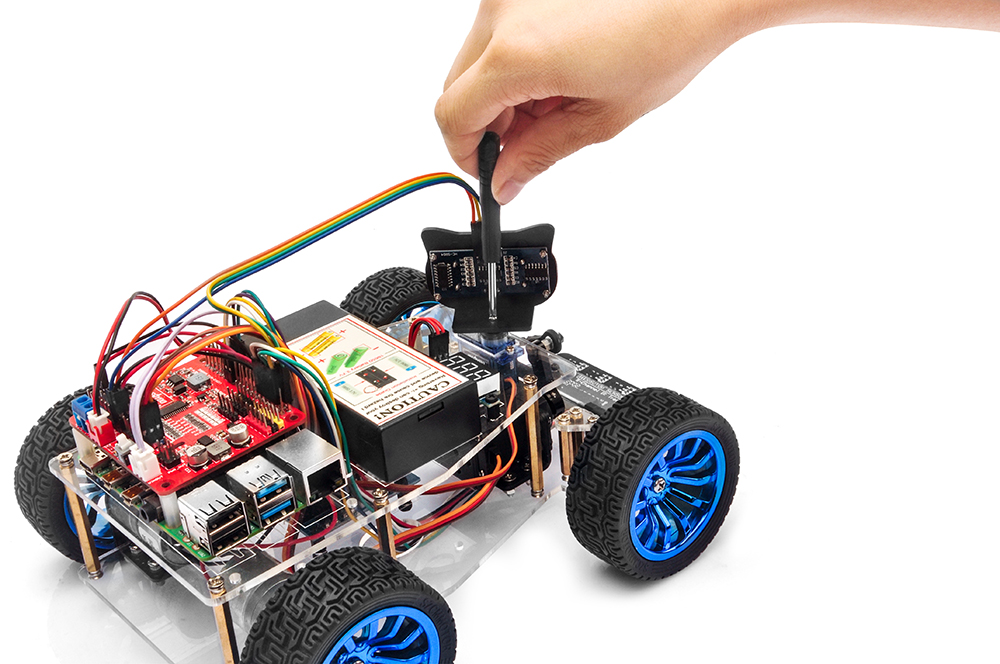
Schritt 2: Installiere den Servo-Motor vorne am oberen Chassis mit 2 selbstschneidenden Schrauben M2.2*8.
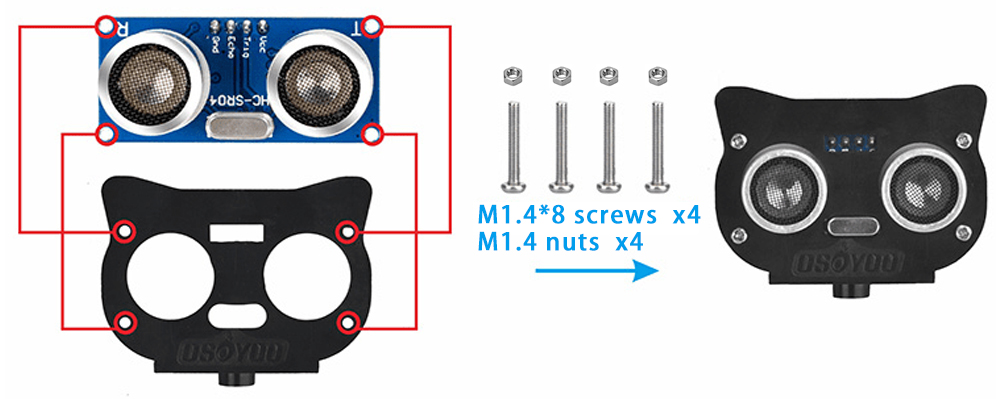
Schritt 3: Schraube den Ultraschall-Sensor mit 4 Schrauben M1.4*8 und M1.4 Muttern in den Sensor-Halter.
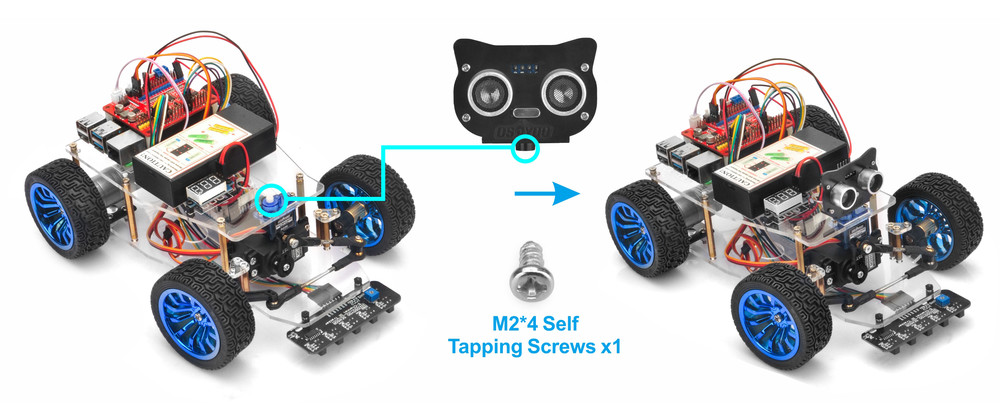
Schritt 4: Setze den Sensor-Halter auf den Micro Servo-Motor und schraube ihn mit einer M2*4 selbstschneidenden Schraube fest.
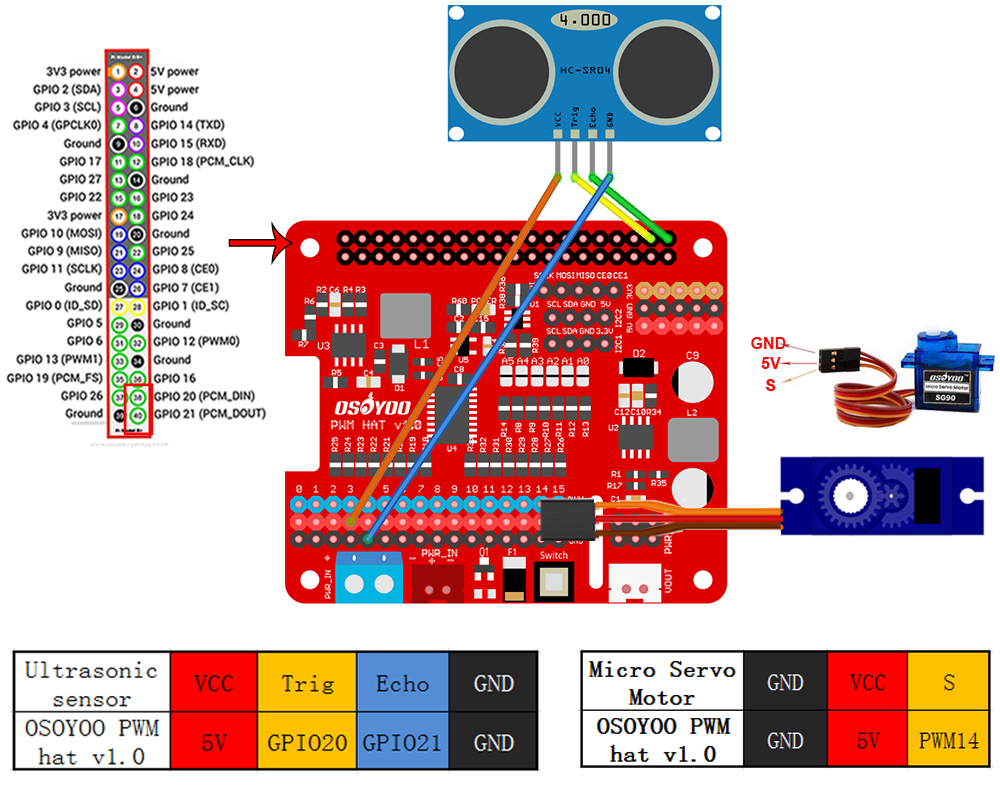
Verbinde den SG90 Servo Motor mit dem PWM 14 Anschluss des OSOYOO PWM HAT Boards; dann verbinde GND und VCC des Ultraschall-Sensors mit GND und 5V des OSOYOO PWM HAT Boards, und TRIG und ECHO des Ultraschall-Sensors mit GPIO20 und GPIO21 des Raspberry Pi (zur Erinnerung: entferne keine Drähte, die bereits in Lektion 1 installiert wurden.):
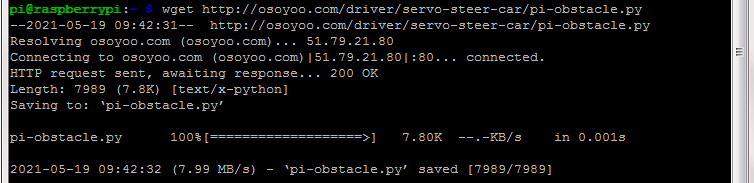
Gebe zum Laden des Python Codes folgendes Kommando in Dein Raspberry Pi Terminal ein:
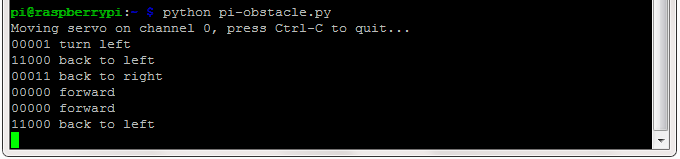
Schalte die Batterie Deines Autos ein und starte das Programm:
python pi-obstacle.py
Der Servo beginnt den Ultraschall-Sensor zu drehen und stoppt für ca. 3 Sekunden in der Geradeaus-Richtung. Wenn Dein Sensor jetzt nicht geradeaus zeigt, schalte die Batterie aus oder drücke Ctrl-C um das Programm zu stoppen. Dann nehme den Sensor vom Servo ab und setze ihn jetzt nach geradeaus gerichtet wieder auf den Servo. Schraube den Sensor mit der Schraube wieder auf dem Servo fest. Gib jetzt das gleiche Kommando python pi-obstacle.py noch einmal ein und starte das Programm erneut.
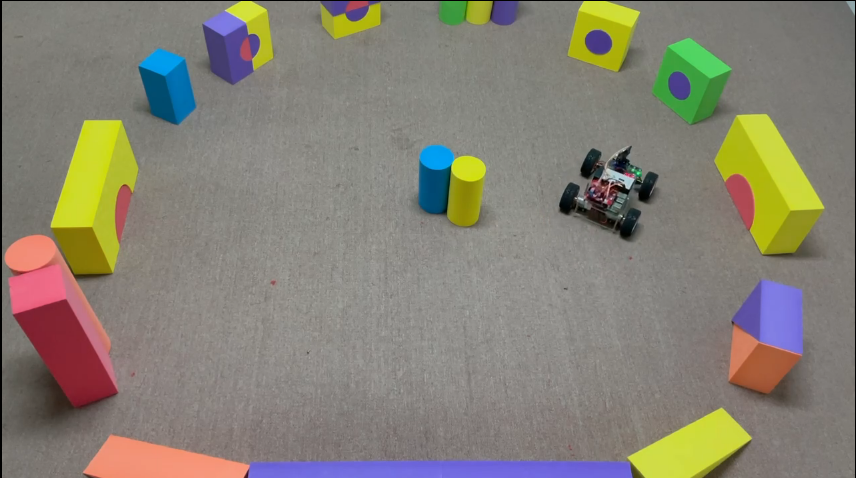
Jetzt fährt das Auto automatisch und weicht Hindernissen selbstständig aus.