In dieser Lektion lernst Du, das Roboterauto mit einer Smartphone-APP über das UDP Protokoll zu steuern. Ein Python-Programm auf dem Raspberry Pi kommuniziert dabei über UDP mit der APP.
Bitte sieh Dir neben dem Tutorial-Text auf jeden Fall auch da Erklär-Video an – viele kleine Tipps und Tricks kannst Du Dir dort einfach abschauen.
Zur Erinnerung : Entferne keine der in Lektionen 1 bis 4 installierten elektrischen Verbindungen.
Osoyoo WIFI Robot APP
Suche “Osoyoo WIFI UDP Robot APP” im
Google Play Store oder im Apple Store
(Wenn Sie diese APP nicht in Google Play finden können,
können Sie die APP direkt über den folgenden Link herunterladen: https://osoyoo.com/driver/udp-app.apk)
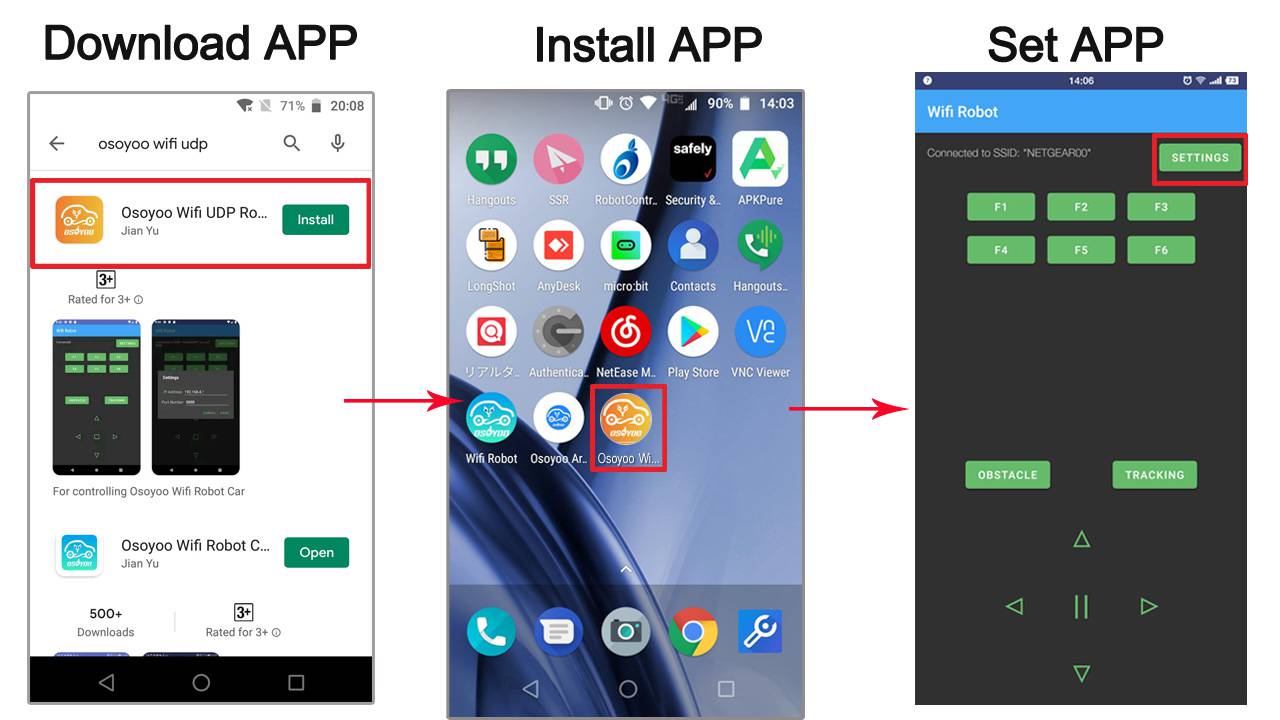
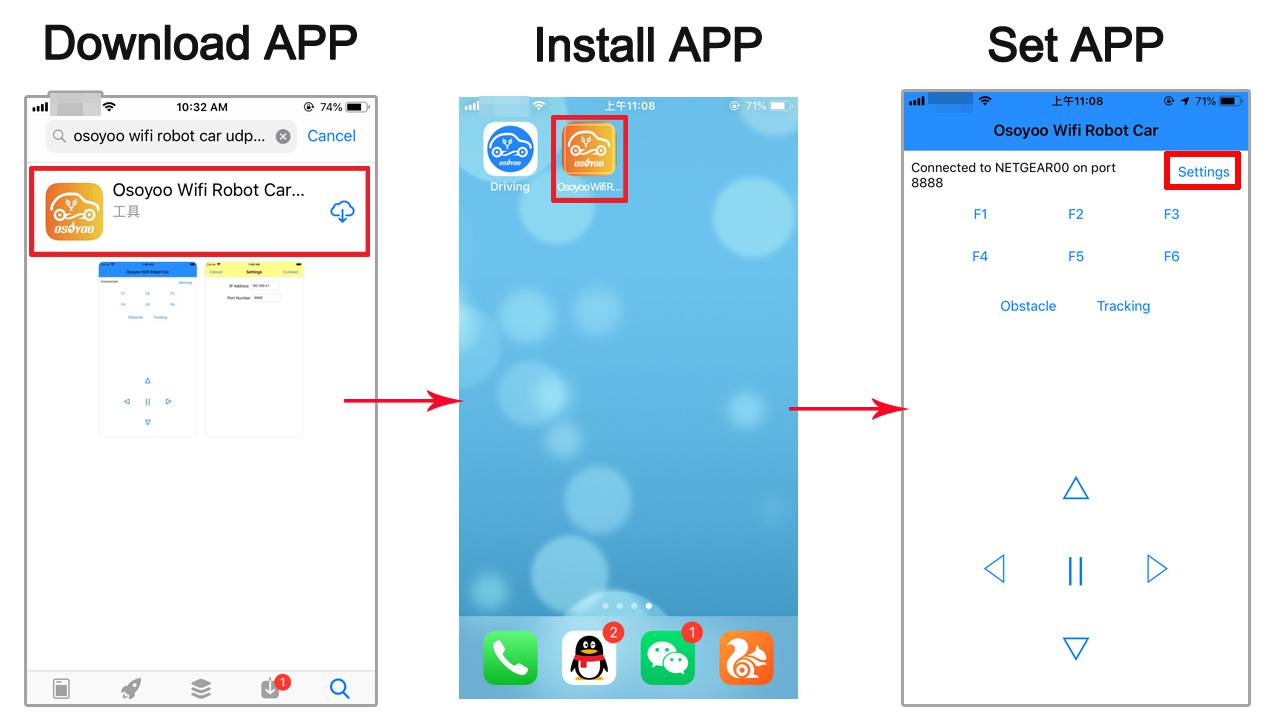
Schritt 1) Lade die OSOYOO WIFI UDP APP zur Steuerung des Roboterautos.
Suche im Google Play Store oder im Apple Store nach den Schlüsselworten “OSOYOO WIFI UDP Robot Car”, wähle die APP mit dem orangen Symbol und installiere sie wie auf folgenden Bildern gezeigt (Hinweis: Wenn Sie diese APP nicht in Google Play finden können, können Sie die APP direkt über den folgenden Link herunterladen: https://osoyoo.com/driver/udp-app.apk):
Schritt 2) Vergewissere Dich, dass Du die Bibliotheken rpi.gpio und adafruit-pca9685 in Lektion 1 installiert hast.
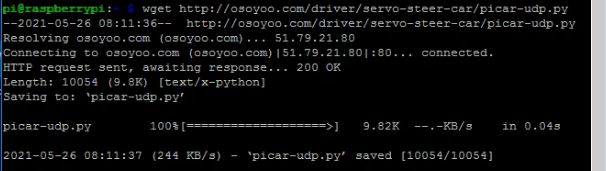
Schritt 3) Gebe zum Laden des Beispielcodes folgendes Kommando in Dein Raspberry Pi Terminal ein:
Schritt 4) Starte den Beispiel-Code mit Eingabe folgenden Kommandos:
python picar-udp.py
oder falls Du Python3 benutzen willst, mit:
python3 picar-udp.py
Nachdem das Python-Programm läuft wartet Dein Auto auf Befehle von der Smartphone APP.
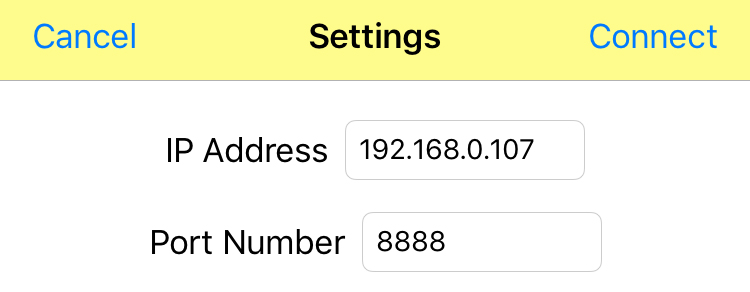
Schritt 5) Verbinde Dein Smartphone mit der gleichen Router WIFI SSID die auch Dein Raspberry Pi benutzt. Öffne die APP, klick “Settings”, gib die Raspberry Pi IP Adresse und den Port als 8888 ein:
Jetzt kannst Du über die < > ^ v Richtungstasten die Autofahrt steuern. Nutze die || Pausetaste um das Auto zu stoppen.
Wenn Du die “Obstacle” Taste drückst, weicht das Auto wie in Lektion 4 automatisch vor Hindernissen aus.
wenn Du die “Tracking” Tast drückst, wechselt das Auto in den Linienverfolgungsmode wie in Lektion 3
Hinweis: F1~F6 sind für künftige Funktionen vorgesehen.
FAQ über die WIFI UDP APP und den Python Code:
Q 1) Wie kann die Fahrzeuggeschwindigkeit geändert werden ? A: Zur Geschwindigkeitsänderung verstelle folgende Parameter in Zeile 19-21 des picar-udp-control.py Files:
high_speed = 3500 # Max pulse length out of 4096
mid_speed = 1900 # Max pulse length out of 4096
low_speed = 1700 # Max pulse length out of 4096
Q 2) Was passiert, wenn eine Taste in der OSOYOO WiFi UDP Robot Car APP gedrückt wird? A: Wenn Du eine Taste in der APP drückst, dann sendet die APP eine Ein-Buchstaben Botschaft über das UDP Protokoll zum Raspberry Pi Empfänger.
Taste
UDP Botschaft
F1
F
F2
G
F3
H
F4
I
F5
J
F6
K
▲
A
▼
B
►
R
◄
L
Quadrat
E
obstacle
O
tracking
T
Q 3) Wie verarbeitet das Python-Programm im Raspberry Pi das UDP Kommando?
In der while Schleife in den Zeilen 319 bis 347 werden die UDP Daten von der APP empfangen und an die Variable cur_status übergeben, die ticker Funktion in den Zeilen 292 – 307 verarbeitet dann den cur_status :
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()
Zum Beispiel, wenn die APP ▲ Taste gedrückt wird, dann bekommt cur_status den Wert A, und die ticker() Funktion ruft die Funktion forward(mid_speed,mid_speed) auf, um das Fahrzeug vorwärts fahren zu lassen.