In questa lezione, ti mostreremo come utilizzare un’app mobile per controllare l’auto robot tramite il protocollo UDP. Il Raspberry Pi eseguirà un programma Python per ricevere pacchetti UDP dall’app.
Ricorda: Mantieni tutti i fili già collegati nelle Lezioni dalla 1 alla 4.
Osoyoo WIFI Robot APP
cerca “Osoyoo WIFI UDP Robot APP” in
Google Play or Apple Store
(Nota: se non riuscite a trovare questa APP in Google Play,
potete scaricare direttamente l’APP dal seguente link: https://osoyoo.com/driver/udp-app.apk)
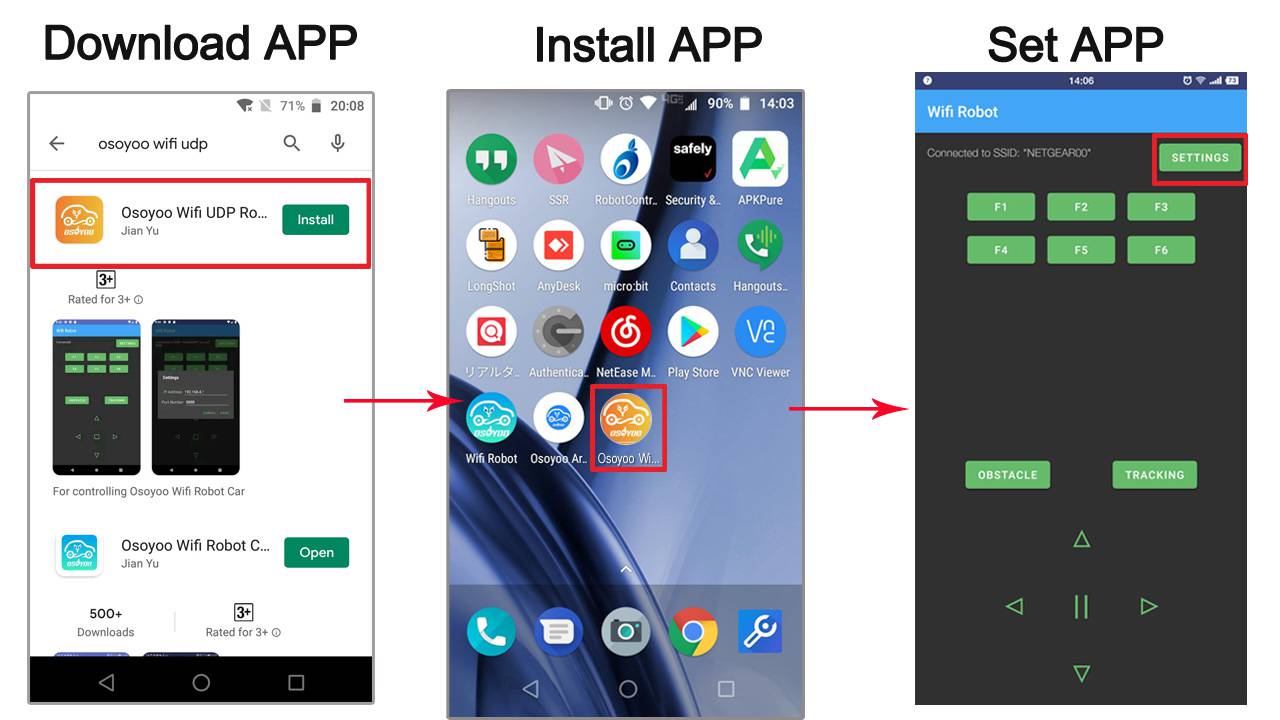
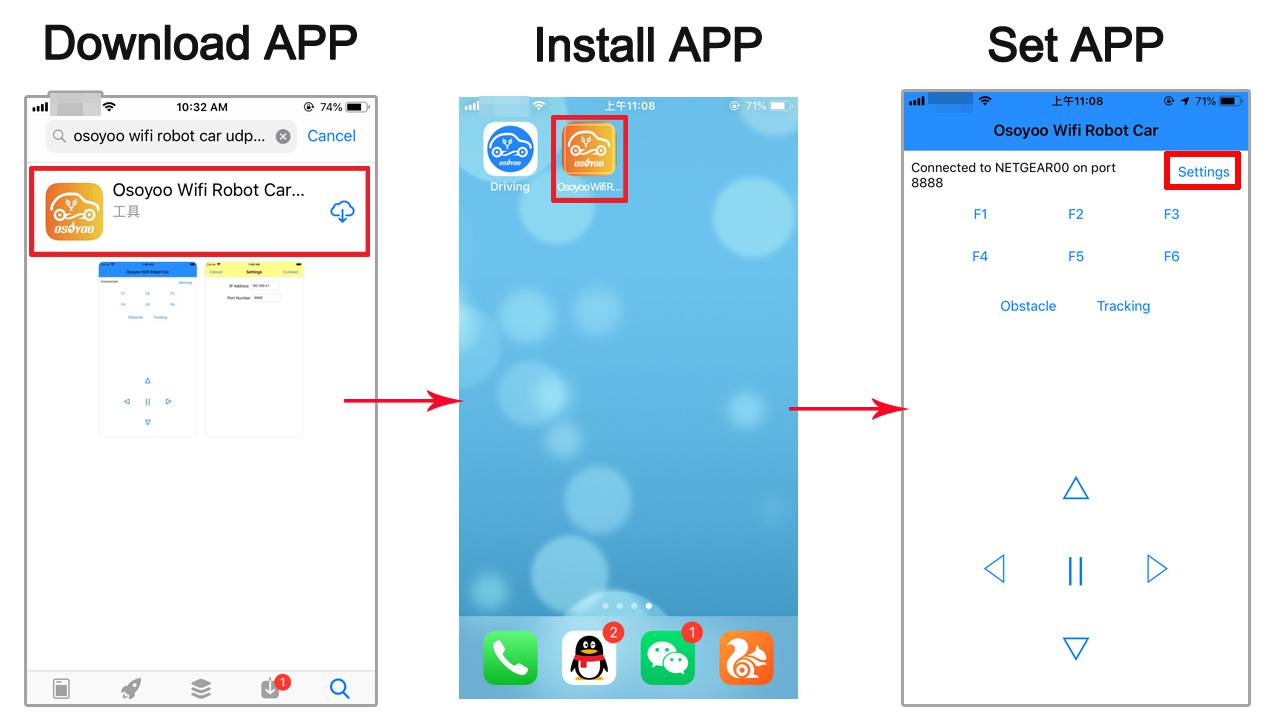
Passo (1) Scarica l’app di controllo OSOYOO WIFI UDP Robot Car
Su Google Play o sull’App Store, cerca le parole chiave “OSOYOO WIFI UDP Robot Car”. Troverai un’icona arancione dell’app come segue( Nota: se non riuscite a trovare questa APP in Google Play, potete scaricare direttamente l’APP dal seguente link: https://osoyoo.com/driver/udp-app.apk):
Passo (2) Assicurati di aver installato le librerie rpi.gpio e adafruit-pca9685 nella Lezione 1.
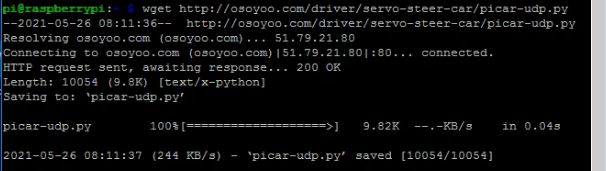
Passo (3) Digita il seguente comando per scaricare il codice di esempio:
Passo (4) Digita il seguente comando per eseguire il codice di esempio:
python picar-udp.py
or if you want to use Python3, typing:
python3 picar-udp.py
Una volta che il codice Python sopra è in esecuzione, la tua auto aspetterà i comandi dal tuo cellulare.
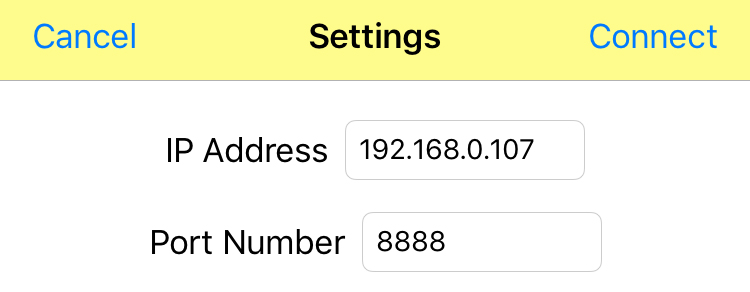
Passo (5) Collega il tuo telefono alla stessa rete Wi-Fi del tuo Raspberry Pi. Apri l’app, fai clic su “Impostazioni”, inserisci l’indirizzo IP del tuo Raspberry Pi e la porta 8888 nelle impostazioni:
Ora puoi fare clic sui tasti di direzione < > ^ v per far muovere l’auto. Utilizza il tasto || per fermare il movimento dell’auto.
Se fai clic sul tasto “Ostacoli”, l’auto eseguirà l’evitamento automatico degli ostacoli, simile alla Lezione 4
If you click Tracking key, the car will do link tracking auto driving similar to Lezione 3
Nota: F1~F6 sono funzioni di sviluppo future.
Domande frequenti sull’app WIFI UDP e sul codice di esempio:
D 1) Come posso regolare la velocità dell’auto robot?
R: Se desideri cambiare le prestazioni di velocità dell’auto robot, modifica i valori dei parametri seguenti nelle righe 19-21 del file picar-udp-control.py:
high_speed = 3500 # Max pulse length out of 4096
mid_speed = 1900 # Max pulse length out of 4096
low_speed = 1700 # Max pulse length out of 4096
D 2) Cosa succede quando premi i pulsanti nell’app OSOYOO WiFi UDP Robot Car?
R: Quando premi un pulsante dell’app, l’app invia un messaggio di una singola lettera tramite il protocollo UDP al dispositivo di destinazione Raspberry Pi
Pulsante
messaggio UDP
F1
F
F2
G
F3
H
F4
I
F5
J
F6
K
▲
A
▼
B
►
R
◄
L
piazza
E
ostacolo
O
monitoraggio
T
D 3) Come gestisce il programma Python del Raspberry Pi il comando UDP?
Il ciclo while dalle righe 319 a 347 riceve dati UDP dall’app e li assegna alla variabile cur_status. La funzione ticker nelle righe 292-307 gestisce la variabile cur_status nel seguente modo:
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()
Ad esempio, quando viene premuto il tasto ▲ nell’app, il valore di cur_status diventa A e la funzione ticker() chiama la funzione forward(mid_speed, mid_speed) per far muovere l’auto in avanti.