En esta lección, te enseñaremos cómo utilizar una aplicación móvil para controlar un coche robot a través del protocolo UDP. El Raspberry Pi ejecutará un programa en Python para recibir paquetes UDP desde la aplicación.
Recuerda: Mantén todos los cables instalados en las Lecciones 1 a 4.
APLICACIÓN Robot Wifi Osoyoo
buscar “Osoyoo WIFI UDP Robot APP” en
Google Play o tienda de Apple
(Si no encuentras esta APP en Google Play,
puedes descargar directamente la APP desde el siguiente enlace: https://osoyoo.com/driver/udp-app.apk)
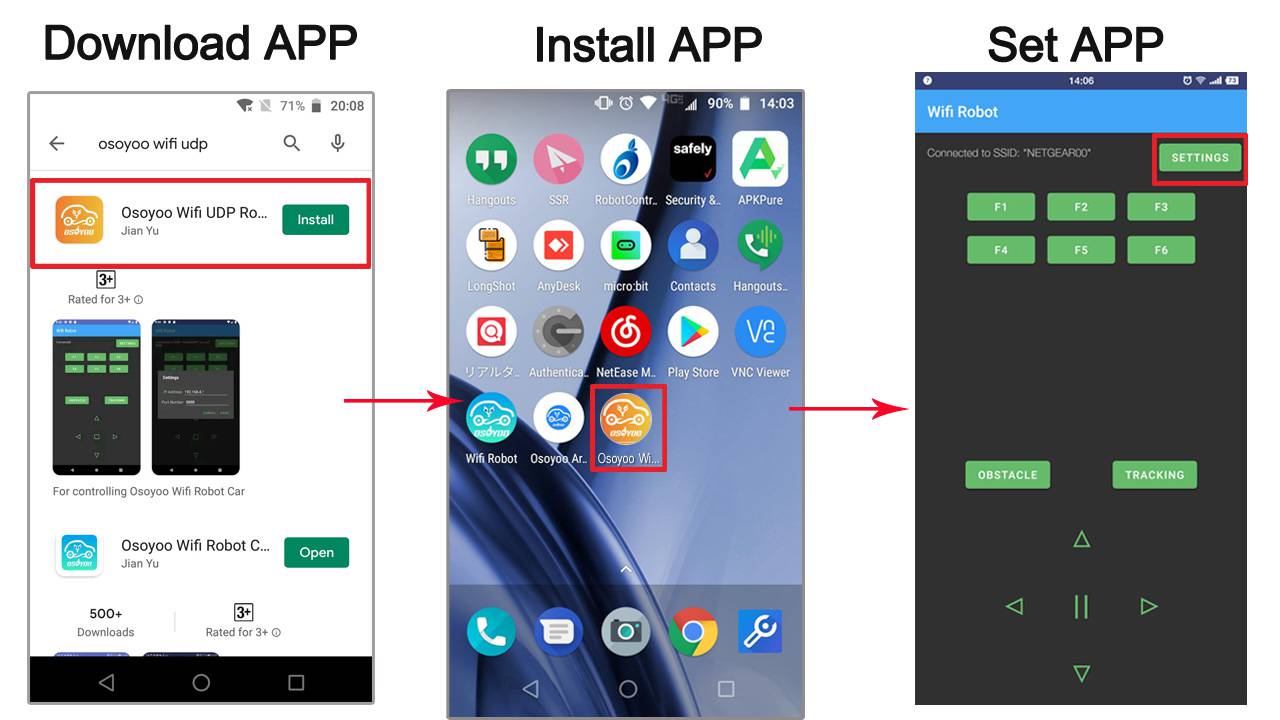
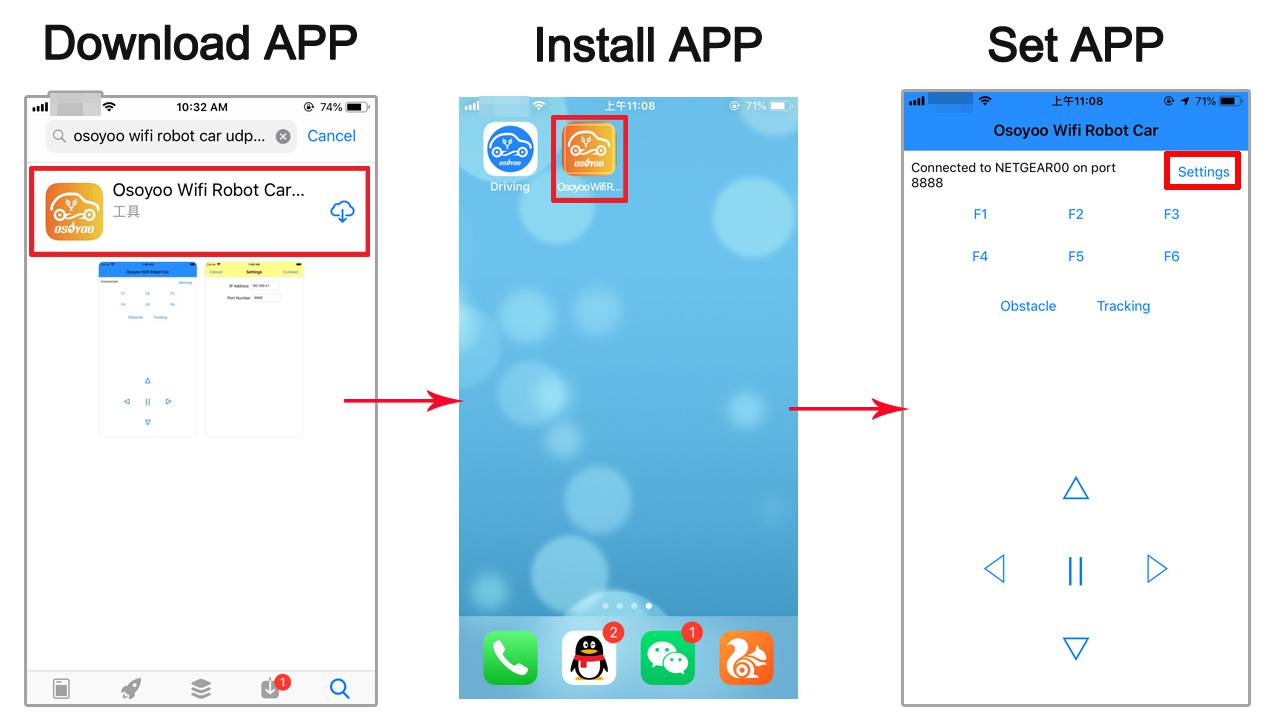
Paso 1) Descarga la aplicación OSOYOO WIFI UDP Robot Car Control
En Google Play o en la App Store, busca las palabras clave “OSOYOO WIFI UDP Robot Car”. Encontrarás una aplicación con un icono naranja como el siguiente (Nota: Si no encuentras esta APP en Google Play, puedes descargar directamente la APP desde el siguiente enlace: https://osoyoo.com/driver/udp-app.apk):
Paso 2) Asegúrate de haber instalado las bibliotecas rpi.gpio y adafruit-pca9685 en la Lección 1.
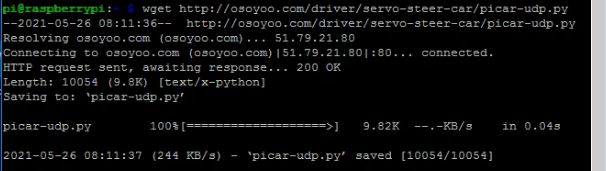
Paso 3) Escribe el siguiente comando para descargar el código de ejemplo:
Paso 4) Escribe el siguiente comando para ejecutar el código de ejemplo:
python picar-udp.py
o si deseas utilizar Python3, escribe:
python3 picar-udp.py
Una vez que el código Python anterior esté en ejecución, tu coche estará esperando comandos desde tu teléfono móvil.
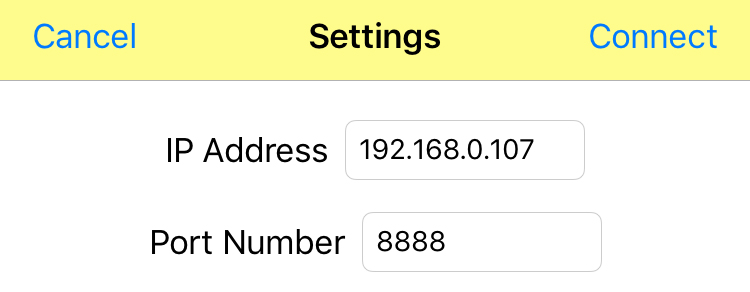
Paso 5) Conecta tu teléfono al mismo router Wi-Fi que utiliza tu Raspberry Pi. Abre la aplicación, haz clic en “Configuración”, ingresa la dirección IP de tu Raspberry Pi y el puerto 8888 en la configuración:
Ahora puedes hacer clic en las teclas de dirección < > ^ v para mover el coche. Usa la tecla || para detener el movimiento del coche.
Si haces clic en la tecla “Obstáculo”, el coche evitará automáticamente los obstáculos, similar a la Lección 4
Si haces clic en la tecla “Seguimiento”, el coche seguirá automáticamente una línea, similar a la Lección 3
Nota: F1~F6 son funciones de desarrollo futuro.
Preguntas frecuentes sobre la aplicación UDP WIFI y el código de ejemplo:
P 1) ¿Cómo ajustar la velocidad del coche robot?
R: Si deseas cambiar el rendimiento de velocidad del coche robot, cambia los valores de los siguientes parámetros en las líneas 19-21 del archivo picar-udp-control.py :
high_speed = 3500 # Longitud máxima de pulso de 4096
mid_speed = 1900 # Longitud máxima de pulso de 4096
low_speed = 1700 # Longitud máxima de pulso de 4096
P 2) ¿Qué ocurre cuando presionas los botones en la aplicación OSOYOO WiFi UDP Robot Car?
R: Cuando presionas un botón en la aplicación, esta envía un mensaje de una sola letra a través del protocolo UDP al dispositivo objetivo Raspberry Pi.
Botón
mensaje UDP
F1
F
F2
G
F3
H
F4
I
F5
J
F6
K
▲
A
▼
B
►
R
◄
L
cuadrado
E
obstáculo
O
seguimiento
T
P 3) ¿Cómo maneja el programa Python del Raspberry Pi el comando UDP?
El bucle while de las líneas 319 a 347 recibe datos UDP desde la aplicación y los asigna a la variable cur_status. La función ticker en las líneas 292 a 307 maneja la variable cur_status de la siguiente manera :
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()
Por ejemplo, cuando se presiona el botón ▲ en la aplicación, el valor de cur_status es A, luego la función ticker() llama a la función forward(mid_speed, mid_speed) para hacer avanzar el coche.