In this project, we will connect the Robot Car to Wi-Fi and Use an APP to control the car through Wi-Fi. This is a typical Internet of Things (IoT) Application. Lesson 1, Lesson 2, Lesson 3 must be completed before doing this lesson.
In diesem Projekt werden wir das Roboter-Auto mit WLAN verbinden und eine App verwenden, um das Auto über WLAN zu steuern. Dies ist eine typische Anwendung des Internets der Dinge (IoT). Lektion 1, Lektion 2, Lektion 3 müssen vor dieser Lektion abgeschlossen sein
Wenn Sie gerade alle Lektionen 1-3 und Lektion 5 (Bluetooth-Imitations-Treiber) abgeschlossen haben, lassen Sie bitte alle Verbindungen der Lektionen so, wie sie sind. Trennen Sie dann Bluetooth vom Wi-Fi Shield.
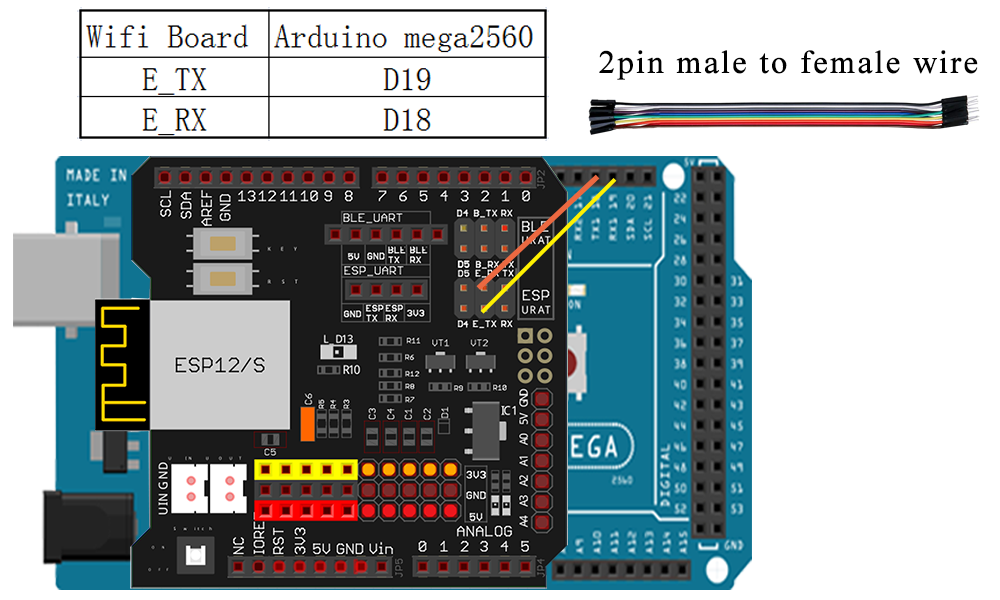
Schritt 1: Entfernen Sie die Verbindung von B_TX zu D18 und B_RX zu D19.
Schritt 2: Verbinden Sie E_RX mit D18 (TX1) und E_TX mit D19 (RX1).
Nur die Anschlüsse mit “B_” müssen abgesteckt werden. Die Reihenfolge der TX- und RX-Pins ist im Vergleich zur Bluetooth-Verbindung umgekehrt..
Schritt 1: Installieren Sie die neueste Arduino-IDE (Wenn Sie bereits eine Arduino-IDE-Version nach 1.1.16 haben, überspringen Sie diesen Schritt bitte). Laden Sie die Arduino-IDE von https://www.arduino.cc/en/Main/Software?setlang=en,herunter und installieren Sie die Software..
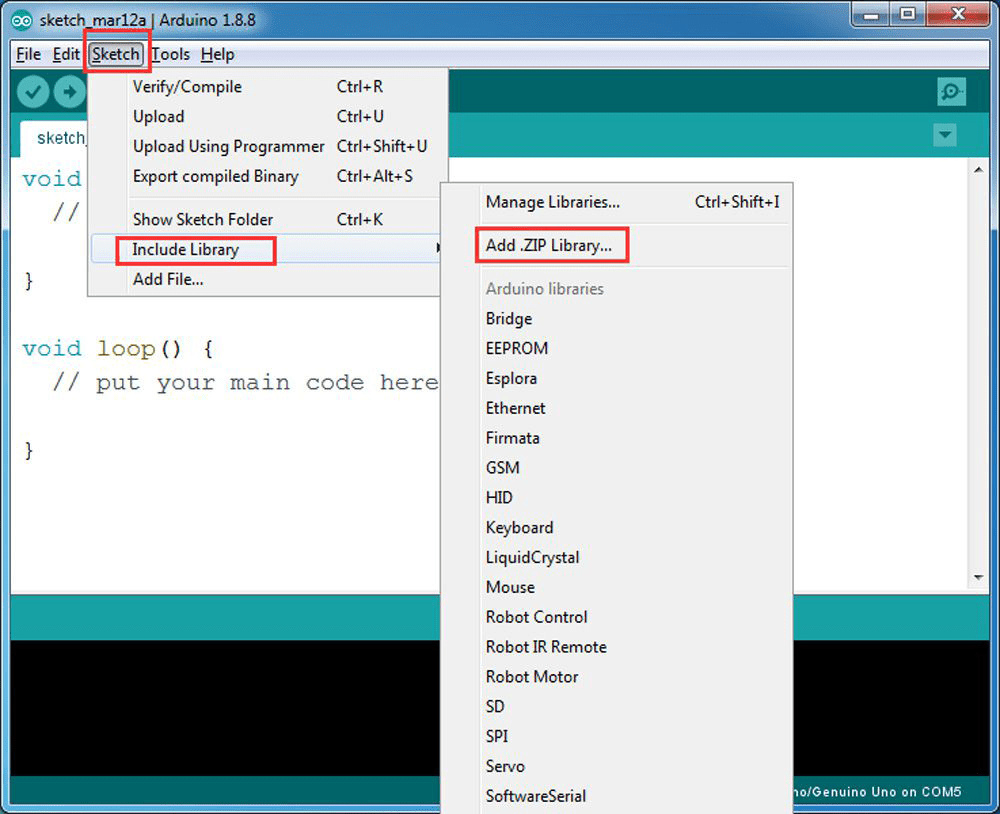
Schritt 2: Laden Sie bitte die Bibliotheks-Zip-Datei von WiFiEsp-master.zip. herunter. Öffnen Sie die Arduino-IDE → klicken Sie auf “Sketch”, → auf “Bibliothek einbinden” → wählen Sie “ZIP-Bibliothek hinzufügen”. Laden Sie anschließend die oben genannte Zip-Datei in Arduino.
Schritt 4: APP-Installation – Suchen Sie im Google Play Store oder im Apple Store nach “OSOYOO Wi-Fi UDP Robot Car Controller” und installieren Sie diese APP.
Schritt 5: Installation des Arduino-Sketch-Codes:
Entpacken Sie die heruntergeladene Datei und öffnen Sie den Ordner “mc-lesson6”. Dort finden Sie zwei Unterordner: “mc-lesson6A” und “mc-lesson6B”.
Diese beiden Ordner enthalten Programme für zwei WLAN-Modi: AP-Modus und STA-Modus. Die Arduino-Sketches für diese beiden Modi sind unterschiedlich. Lassen Sie uns diese beiden Modi nacheinander erklären.
Wenn Sie im AP-Modus arbeiten, wird unser Roboter-Auto selbst zu einem WLAN-Hotspot. Unser Handy kann sich als Wi-Fi-Client mit dem Roboter-Auto verbinden. Die IP-Adresse des Roboters ist fest auf 192.168.4.1 eingestellt. In diesem Fall sind sowohl das Roboter-Auto als auch Ihr Handy nicht mit dem WAN verbunden.
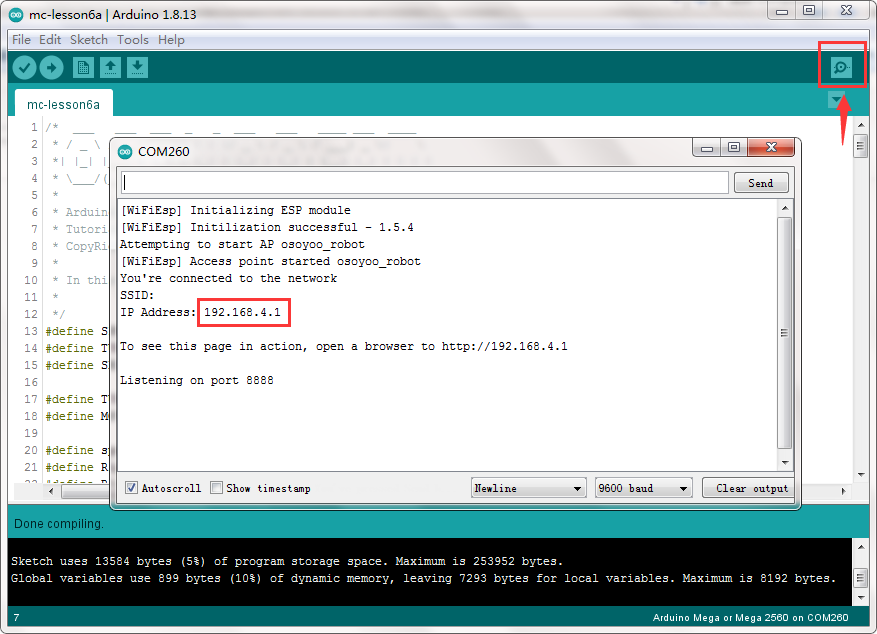
(1) Entpacken Sie die Datei mc-lesson6.zip. Sie sehen einen Ordner namens mc-lesson6A. Laden Sie den Code auf den Arduino hoch.
(2)Öffnen Sie Ihren Arduino Serial Monitor und Sie werden ein ähnliches Ergebnis wie im AP-Modus sehen. Ein neues Wi-Fi-SSID “osoyoo_robot” mit der IP-Adresse 192.168.4.1 wird im Fenster angezeigt. Dies bedeutet, dass Ihr Roboterauto einen Wi-Fi-Hotspot namens “osoyoo_robot” hat und seine IP-Adresse 192.168.4.1 ist.
(3)Jetzt wird Ihr Roboterauto zu einem Wi-Fi-Hotspot und stellt die IP-Adresse in Ihrem App-Einstellungsbereich auf “192.168.4.1” ein.
(4) Verbinden Sie Ihr Mobiltelefon mit dem Wi-Fi-Hotspot “osoyoo_robot”, und Sie können das Mobiltelefon verwenden, um das Roboter-Auto zu steuern..
(5)Sie können die Richtungstasten ◄ ► ▲ ▼ klicken, um das Auto zu bewegen. Verwenden Sie die Taste “||” zum Anhalten der Fahrzeugbewegung.
Klicken Sie auf “Hindernis”, um nach links zu lenken. Klicken Sie auf “Tracking”, um nach rechts zu lenken.
Klicken Sie auf F1, um sich diagonal nach oben links zu bewegen. Klicken Sie auf F3, um sich diagonal nach oben rechts zu bewegen.
Klicken Sie auf F4, um sich diagonal nach unten links zu bewegen. Klicken Sie auf F6, um sich diagonal nach unten rechts zu bewegen.
Im STA-Modus fungiert das Roboter-Auto nicht als Wi-Fi-Hotspot. Stattdessen wird es zu einem Internetknotenpunkt in Ihrem lokalen Netzwerk. Sie müssen dem Arduino-Sketch mitteilen, was der SSID und das Passwort Ihres lokalen Routers sind. Dann kommuniziert der Arduino mit dem Router und erhält seine eigene LAN-IP-Adresse vom DHCP-Server. Sie können eine mobile App verwenden, um auf die IP-Adresse des Roboter-Autos zuzugreifen und seine Bewegung zu steuern.
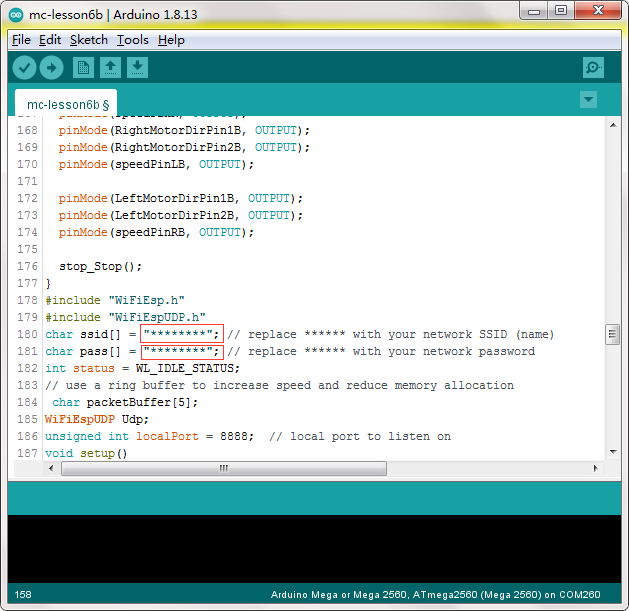
(1)Entpacken Sie die Datei mc-lesson6, und Sie werden einen Ordner mit dem Namen mc-lesson6b sehen. Laden Sie dann den Code mc-lesson6b.ino in Arduino.
(2) Sie müssen den Code in Zeile 180 und Zeile 181 ändern :
char ssid[] = “YOUR_ROUTER_SSID”; //Ersetzen Sie dies durch den SSID Ihres Router-WLANs
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // Ersetzen Sie dies durch Ihr WLAN-Passwort.
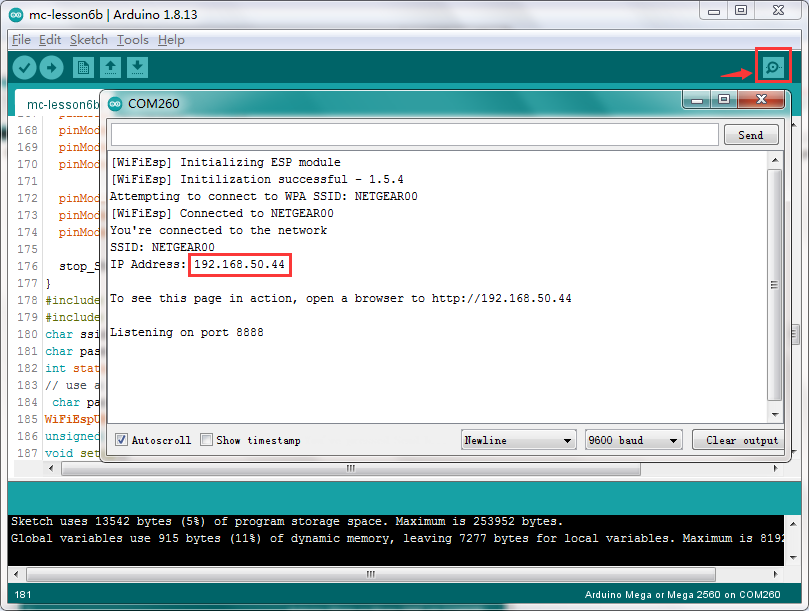
(3) Laden Sie den Sketch auf den Arduino hoch. Klicken Sie abschließend auf das Serial Monitor-Fenster in der oberen rechten Ecke der Arduino IDE. Sie werden folgendes Ergebnis sehen:
(4)In diesem Modus sehen Sie eine IP-Adresse, die unsere LAN-IP-Adresse ist, die von meinem Router zugewiesen wurde. Bitte notieren Sie sich diese IP-Adresse 192.168.50.44 und klicken Sie auf “Einstellungen”, um die IP-Adresse des Roboters festzulegen. Tragen Sie diese IP-Adresse 192.168.50.44 in den Abschnitt “APP-Einstellungen” ein (die Standardportnummer 8888 in der App muss nicht geändert werden).
(5)Jetzt ist Ihr Roboter-Auto mit Ihrem LAN verbunden. Sie können Ihr Mobiltelefon im selben LAN verwenden, um das Roboter-Auto zu steuern. Wenn sich Ihre App im WAN befindet, müssen Sie zum Steuerungspanel Ihres Routers gehen, Port 80 an die LAN-IP-Adresse des Roboter-Autos weiterleiten und dann können Sie das Router-IP verwenden, um das Auto zu steuern. Diese Funktion macht unser Roboter-Auto zu einem echten “Internet der Dinge”-Gerät.
(6)Sie können die Richtungstasten ◄ ► ▲ ▼ klicken, um das Auto zu bewegen. Verwenden Sie die Taste “||” zum Anhalten der Fahrzeugbewegung.
Klicken Sie auf “Hindernis”, um nach links zu lenken. Klicken Sie auf “Tracking”, um nach rechts zu lenken.
Klicken Sie auf F1, um sich diagonal nach oben links zu bewegen. Klicken Sie auf F3, um sich diagonal nach oben rechts zu bewegen.
Klicken Sie auf F4, um sich diagonal nach unten links zu bewegen. Klicken Sie auf F6, um sich diagonal nach unten rechts zu bewegen.
FAQ zum WIFI-UDP-APP und zum Sketch-Code:
Q1)Wie kann man die Geschwindigkeit des Roboter-Autos anpassen?
A: Wenn Sie die Geschwindigkeitsleistung des Roboter-Autos ändern möchten, ändern Sie bitte die folgenden Parameter in den Zeilen 11 bis 13:
Der Wert von SPEED bestimmt die Vorwärtsgeschwindigkeit
Der Wert von TURN_SPEED bestimmt die Drehgeschwindigkeit
Der Wert von SHIFT_SPEED bestimmt die Parallelverschiebungsgeschwindigkeit
Q 2)What happened when you press buttons in OSOYOO WiFi UDP Robot Car APP ?
A: Wenn Sie eine Taste in der APP drücken, sendet die APP über das UDP-Protokoll eine einzelne Buchstabenmeldung an das Zielgerät (in diesem Beispiel unser Arduino WIFI Shield)
Q3)Wie verarbeitet Arduino den UDP-Befehl?
Die Zeilen 230 bis 245 in der Datei mecanum-2560-lesson5A.ino enthalten den Code, der auf den Befehl des Mobiltelefons reagiert. Zum Beispiel, wenn ▲ gedrückt wird, wird gemäß der Tabelle in F1 der Buchstabe “A” vom Mobiltelefon an Arduino gesendet. Die Anweisung case ‘A’ in Zeile 233 … wird das Auto vorwärts fahren lassen.
char c=packetBuffer[0];
switch (c) //serial control instructions
{
case ‘A’:go_advance(SPEED);;break;
case ‘L’:left_turn(TURN_SPEED);break;
case ‘R’:right_turn(TURN_SPEED);break;
case ‘B’:go_back(SPEED);break;
case ‘E’:stop_Stop();break;
case ‘F’:left_shift(0,150,0,150);break; //left ahead
case ‘H’:right_shift(180,0,150,0);break; //right ahead
case ‘I’:left_shift(150,0,150,0); break;//left back
case ‘K’:right_shift(0,130,0,130); break;//right back
case ‘O’:left_shift(200,150,150,200); break;//left shift
case ‘T’:right_shift(200,200,200,200); break;//left shift
default:break;
}