Mecanum Wheel Robot Car Komplettpaket (mit 18650 Batterien)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
Der Encoder wird normalerweise für den PID-Algorithmus verwendet. Im Moment benötigt unser Mecanum-Auto keine PID-Funktion, daher schreiben wir kein Encoder-Programm für dieses Auto.
Viele Benutzer haben einen OSOYOO DC-Getriebemotor für Panzerroboter, Mecanum-Radroboter und Balance-Autos mit eingebautem Encoder gekauft. Einige von ihnen interessieren sich dafür, wie man Encoder programmiert. Wir stellen ein einfaches Programm zur Verfügung, das den Benutzer anleitet, das OSOYOO Basic Board für Arduino zu verwenden, um zu lesen, wie viele Impulse Encoder bei jeder Umdrehung an Arduino senden.
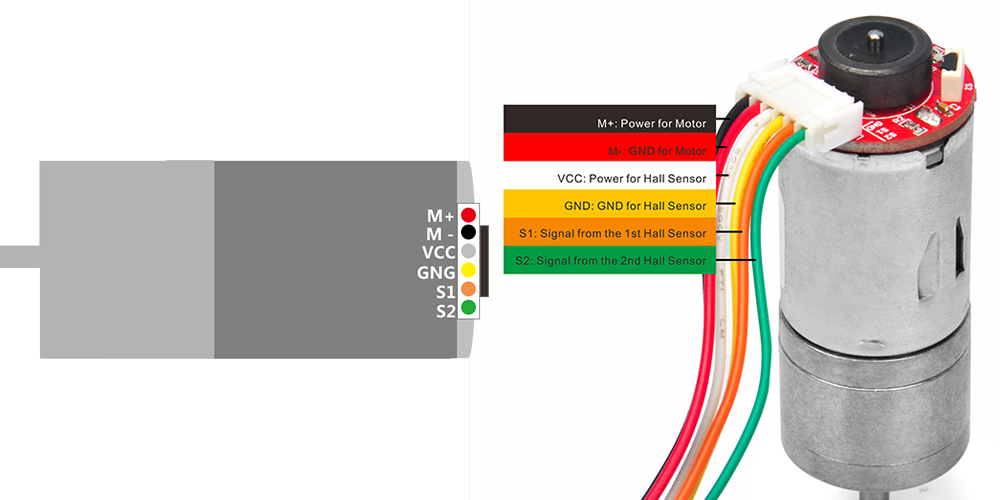
Jetzt kommen die neuesten Versionen der Motoren ohne Schutzkappen, wie das beigefügte Bild zeigt. Die Motorschutzkappe lässt sich leicht abziehen, daher entfernen wir diese Kappe..
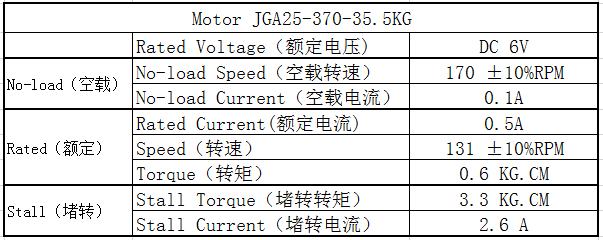
Datenblatt:JGA25-370-35.5KG
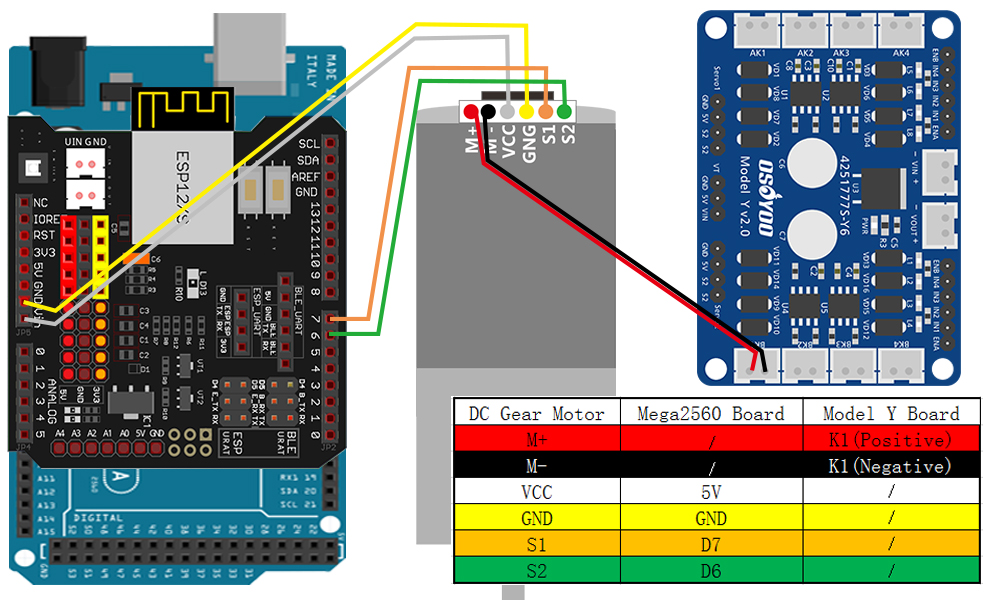
Verbindung:
Schrittmotor
OSOYOO Basisboard für Arduino
weiße Linie(V- Power))
VCC
Gelbe Linie(G-GND
GND
Orange (S1)
D7
Grün (S2)
D6
Einige Module haben möglicherweise die V Power/G-GND-Leitung vertauscht. Wenn der folgende Code nicht funktioniert, schalten Sie bitte die gelbe Leitung auf 5 V und die weiße Leitung auf Arduino GND
Nachdem Sie den Code in die Arduino IDE geladen haben, öffnen Sie den seriellen Monitor in der oberen rechten Ecke..
Montieren Sie nun ein Rad auf den DC-Getriebemotor und machen Sie es von Hand drehbar. Drehen Sie dann das Rad um 360 Grad und halten Sie an. Sie werden sehen, dass der Bildschirm des seriellen Monitors angezeigt wird:
Die letzte Zeile zeigt Position 151 . Das heißt, wenn Sie den Motor um 360 Grad drehen, hat der Hallsensor 151 Impulse erzeugt. Mein Motor hat also etwa 150 Impulse pro Umdrehung.
Do you have the sensors required for this lesson available for purchase?
I realize they are extra and do not come with the kit that I purchased.
Thank you,
Clay












Do you have the sensors required for this lesson available for purchase?
I realize they are extra and do not come with the kit that I purchased.
Thank you,
Clay
hi, Clay,
You can buy the IR obstacle sensor in https://osoyoo.store/products/ir-obstacle-avoidance-module-for-arduino-v2-0-robot-carmodel-2016000400?variant=31648429015151