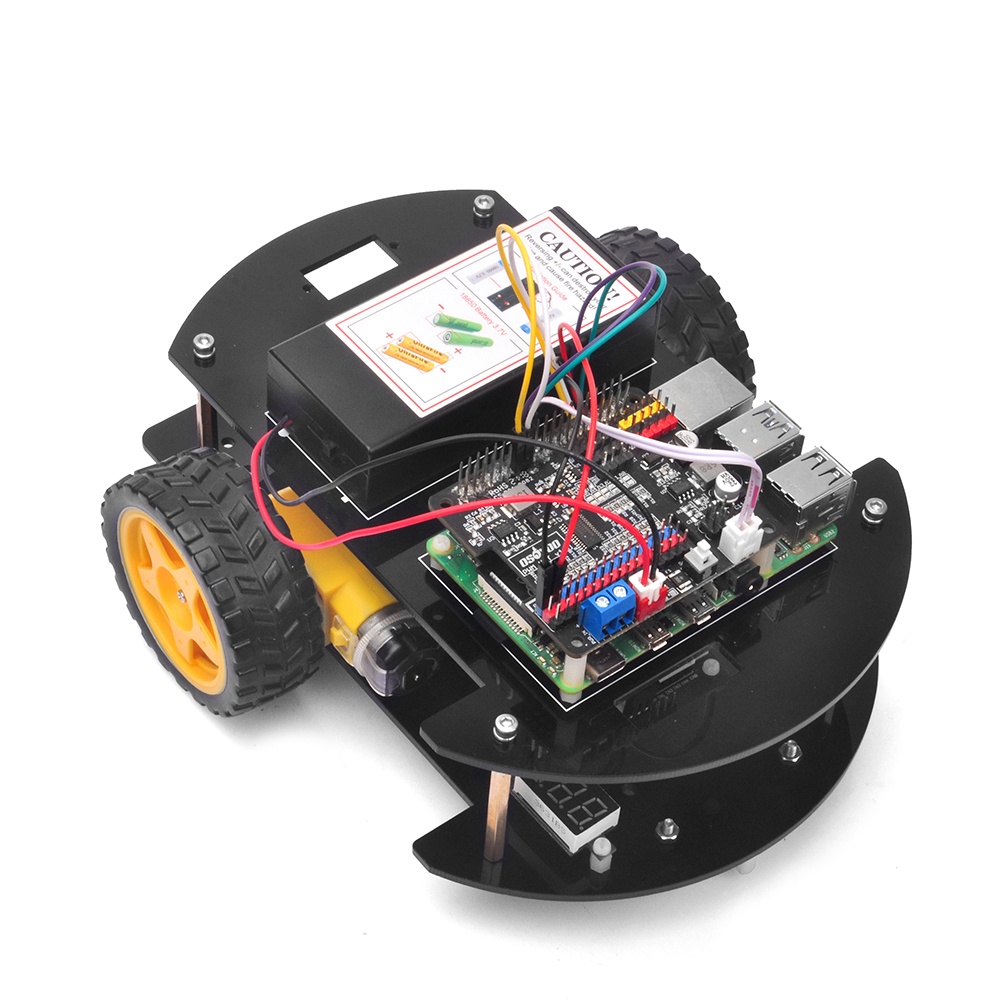
Willkommen zur ersten Lektion von OSOYOO Robot Car für Raspberry Pi!
In dieser Lektion stellen wir Ihnen zunächst vor, wie Sie das Framework des OSOYOO-Roboterautos für Raspberry Pi installieren, dann erklären wir Ihnen einfach, wie Sie Raspberry Pi OS für den Raspberry Pi installieren und wie Sie die Konsole verwenden, um Raspberry Pi zu steuern. Wir werden OSOYOO Robot Car für Raspberry Pi verwenden, um einige einfache Bewegungen auszuführen.
Wenn Sie die Testbewegung dieser Lektion bestanden haben, bedeutet dies, dass Raspberry Pi, Motoren, Batterie, Modell-X-Platine, OSOYOO PWM HAT und Kabelverbindungen zwischen diesen Teilen alle gut funktionieren und Sie mit anderen Beispiellektionen fortfahren können
Alle Lektionen basieren auf dem Rahmen dieser Lektion. Bitte befolgen Sie diese Lektion sorgfältig.
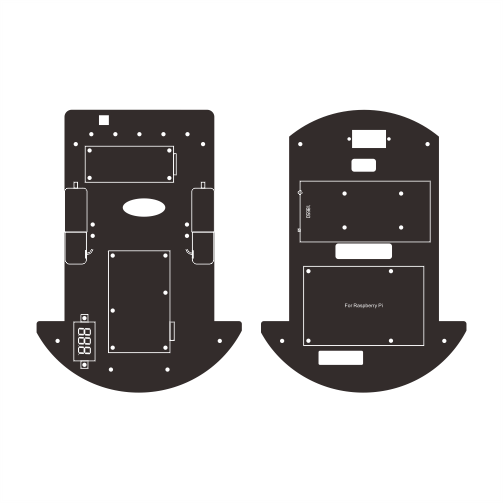
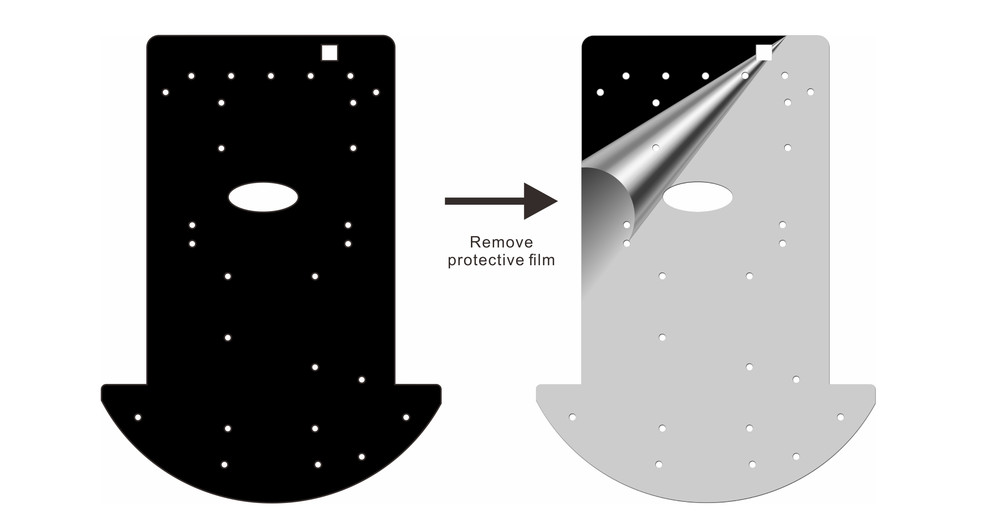
1) Entfernen Sie die Schutzfolie am oberen und unteren Fahrzeugchassis (jedes Fahrzeugchassis hat eine Schutzfolie).
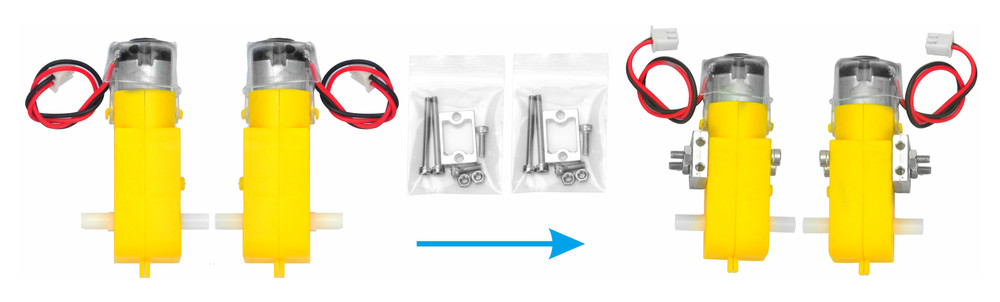
2) Installieren Sie 2 Motoren mit Motorhaltern aus Metall wie folgt.
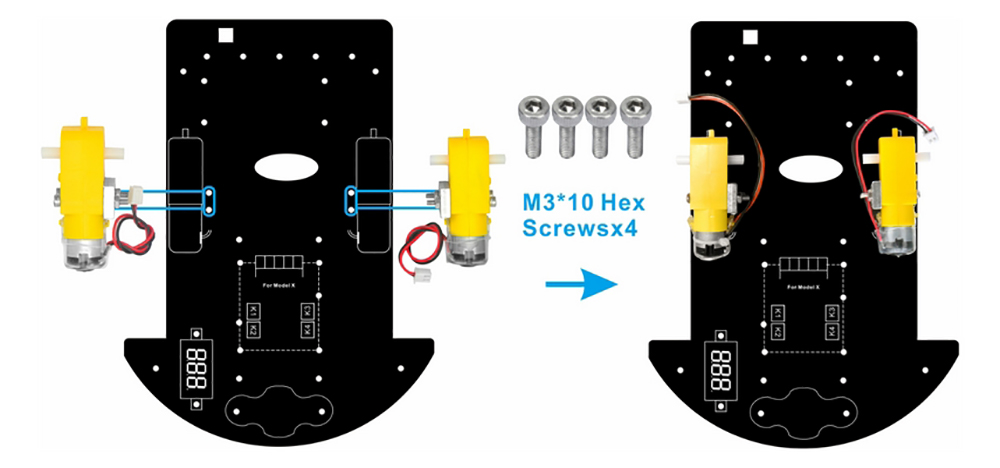
3) 2 Motoren mit der Schraube M3*10 am unteren Fahrgestell montieren. (Schrauben im Motorhalterpaket aus Metall. Bitte fügen Sie M3-Unterlegscheiben zwischen Schrauben und Gehäuse hinzu, wenn sich die Schrauben leicht lösen lassen.)
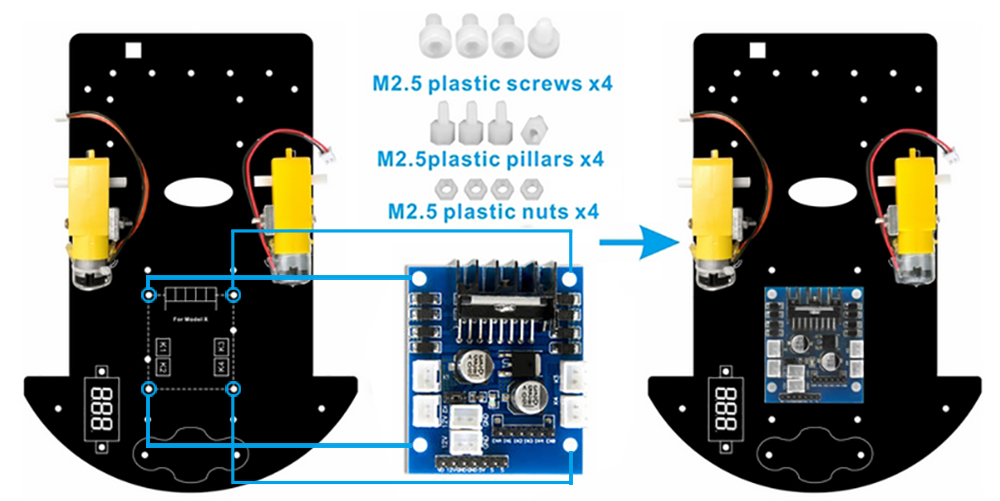
4) Installieren Sie das OSOYOO MODEL X Motortreibermodul mit 4 Stück M2,5-Kunststoffschrauben, Kunststoffsäulen und Kunststoffmuttern am unteren Fahrgestell des Autos. (Bitte stellen Sie sicher, dass Sie das OSOYOO MODEL X Motortreibermodul in der richtigen Richtung installieren.)
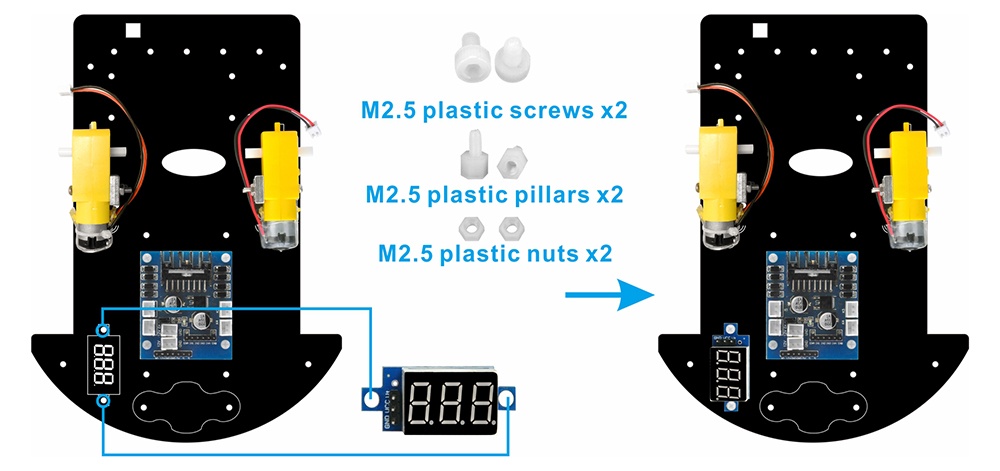
5) Installieren Sie den Spannungsmesser am unteren Fahrzeugchassis mit 2 Stück M2,5-Kunststoffschrauben, Kunststoffsäulen und Kunststoffmuttern.
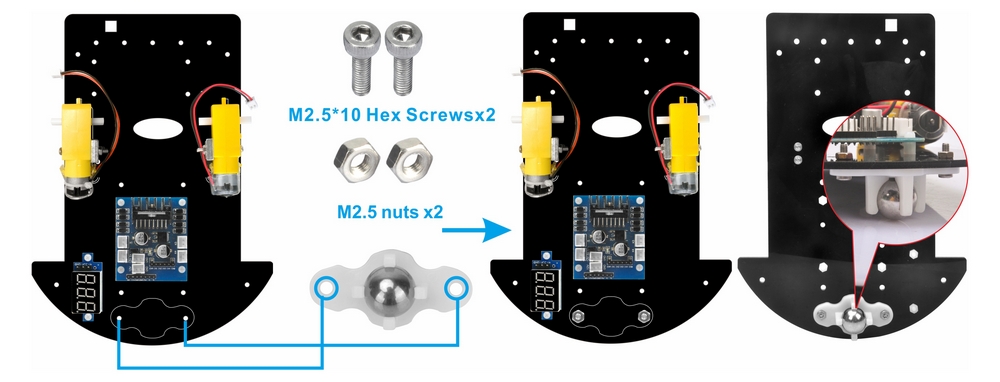
6) Montieren Sie das Universalrad mit 2 Stück M3x10-Sechskantschrauben und M3-Muttern unter dem unteren Fahrzeugchassis.
7) Montieren Sie 2 Räder an den Motoren (Wenn Sie feststellen, dass die Räder zu fest installiert sind, um sich zu bewegen, können Sie die Schrauben an den Rädern entfernen)
8) Installieren Sie 4 Stück Kupfersäulen auf einem niedrigen Autochassis mit 4 Stück M3x10 Sechskantschrauben. (Bitte fügen Sie M3-Waschungen zwischen Schrauben und Gehäuse hinzu, wenn sich die Schrauben leicht lösen lassen.)
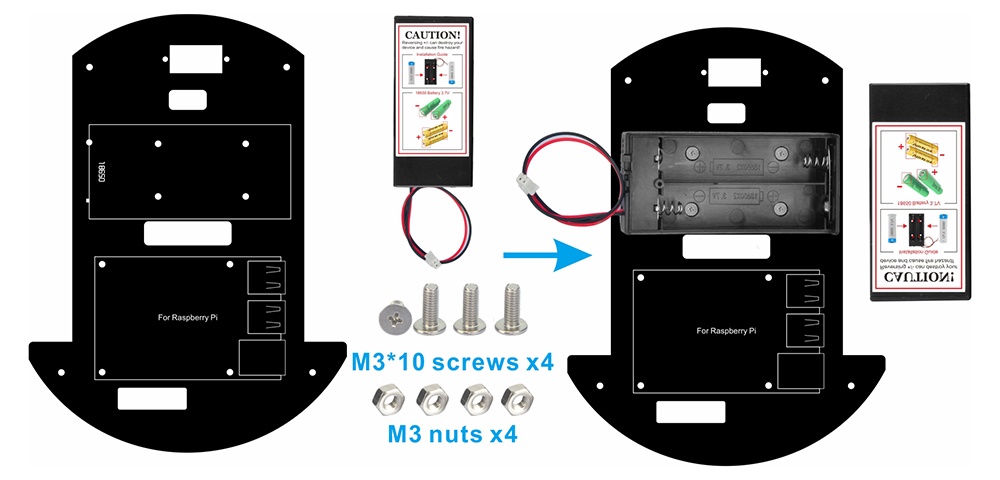
9) Installieren Sie den Batteriekasten 18650 mit 4 Stück M3x10-Schrauben und M3-Muttern auf dem oberen Fahrzeugchassis.
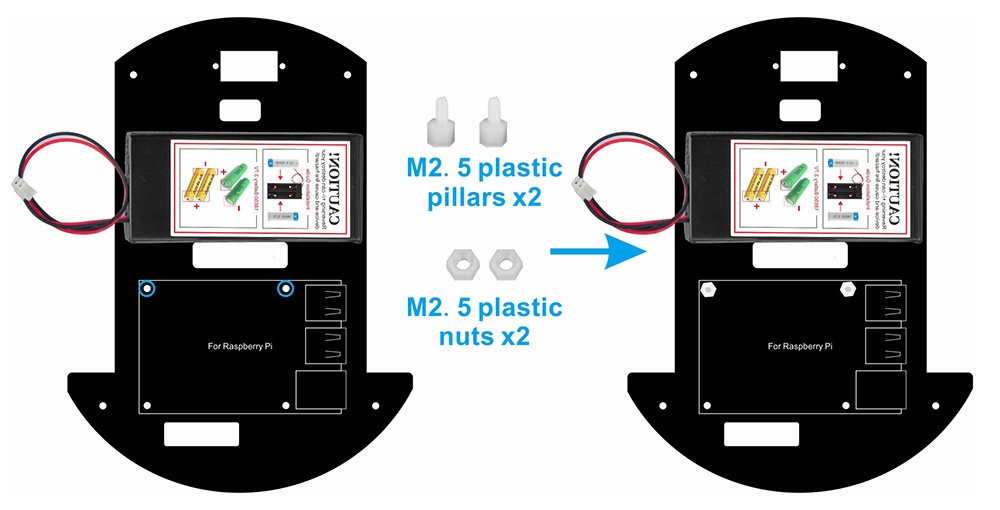
10) Befestigen Sie 2 Stück M2.5-Kunststoffsäulen wie folgt am oberen Chassis:
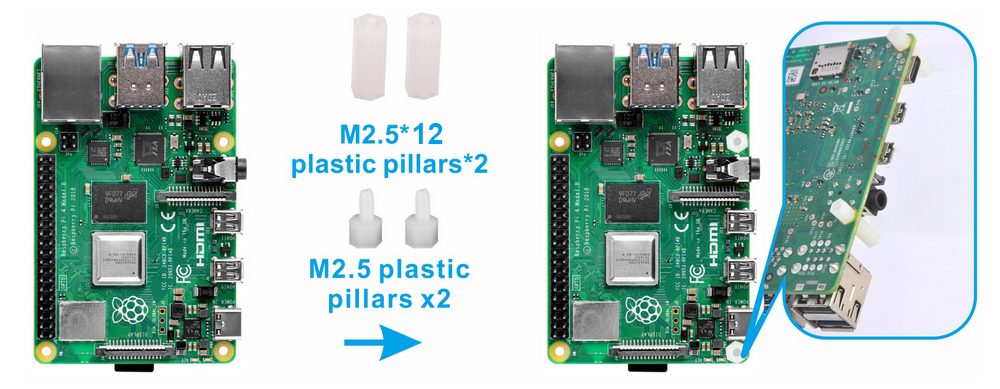
11) Verwenden Sie das M2.5-Kunststoffsäulenkreuz Raspberry Pi und die M2.5 * 12-Kunststoffsäule von unten nach oben wie folgt
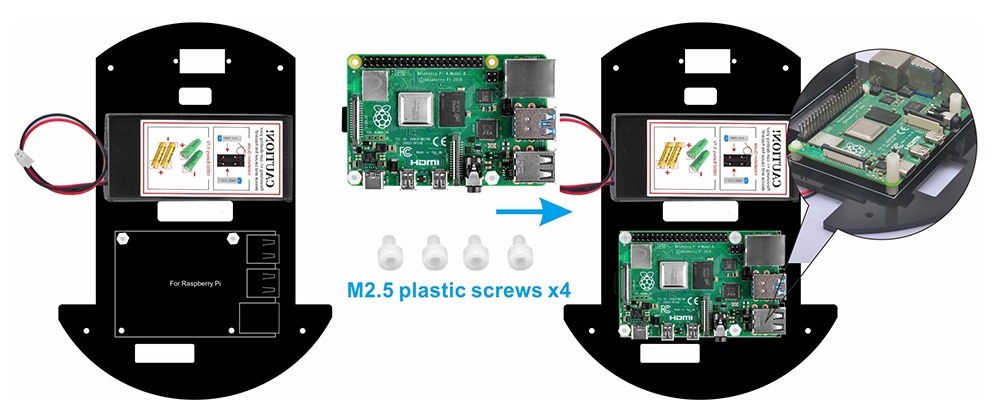
12) Montieren Sie 2 Stück M2.5 Kunststoffschrauben unter dem Gehäuse und 2 Stück M2.5 Kunststoffschrauben am Raspberry Pi
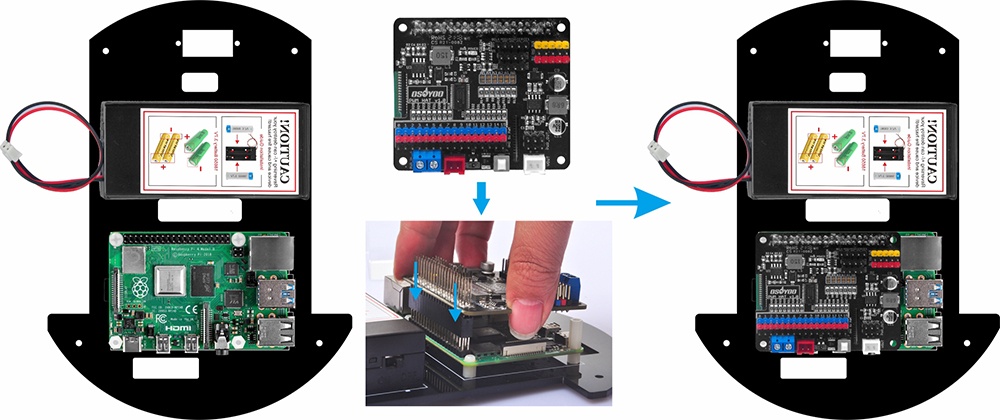
13) Setzen Sie OSOYOO PWM Hat wie folgt auf Raspberry Pi ein:
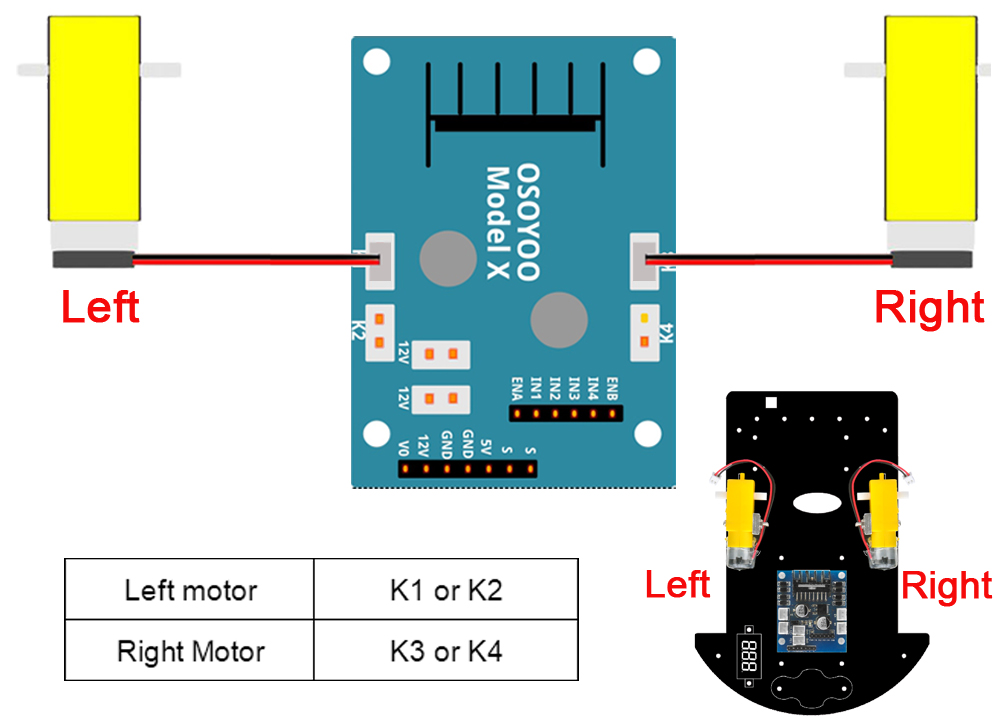
Schritt 1: Verbinden Sie den linken Motor mit der K1- oder K2-Buchse des OSOYOO Model X-Motortreibermoduls, den rechten Motor mit der K3- oder K4-Buchse gemäß der folgenden Grafik:
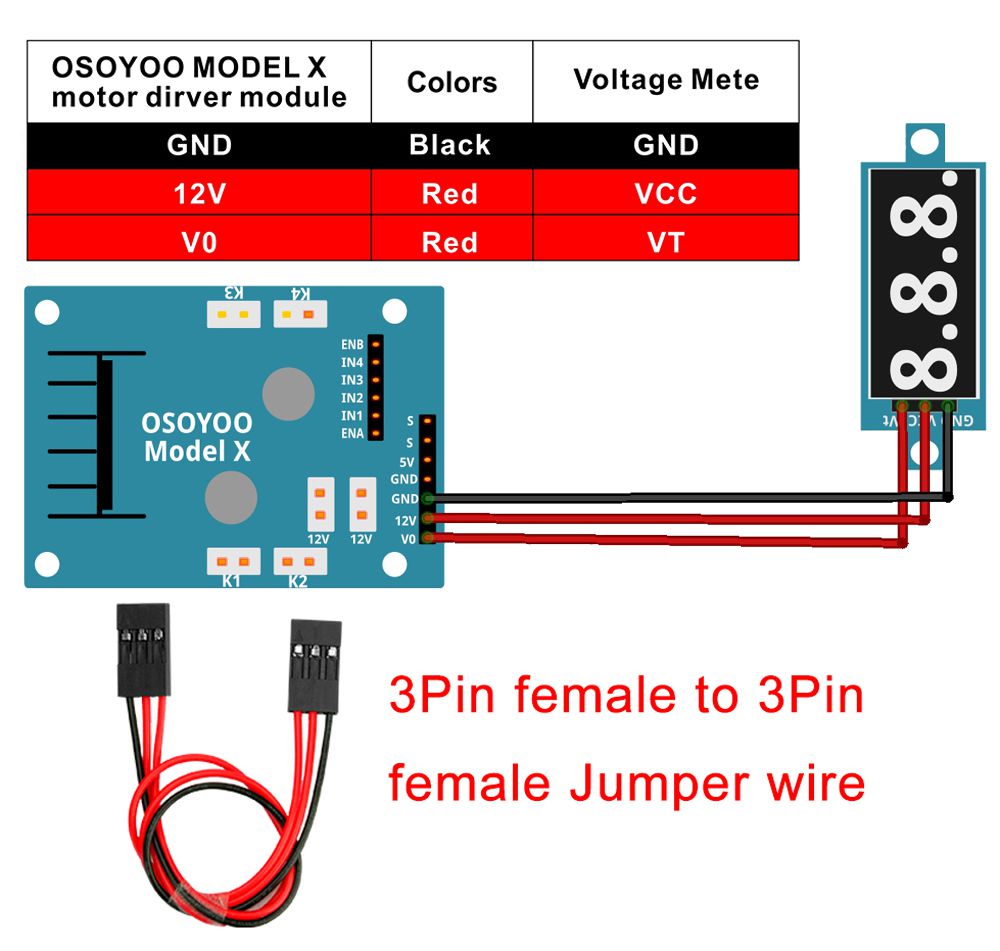
Schritt 2: Verbinden Sie das Spannungsmessgerät mit dem OSOYOO MODEL X-Motortreibermodul mit 3-poligen Überbrückungsdrähten von Buchse zu Buchse wie folgt Anschlussdiagramm:
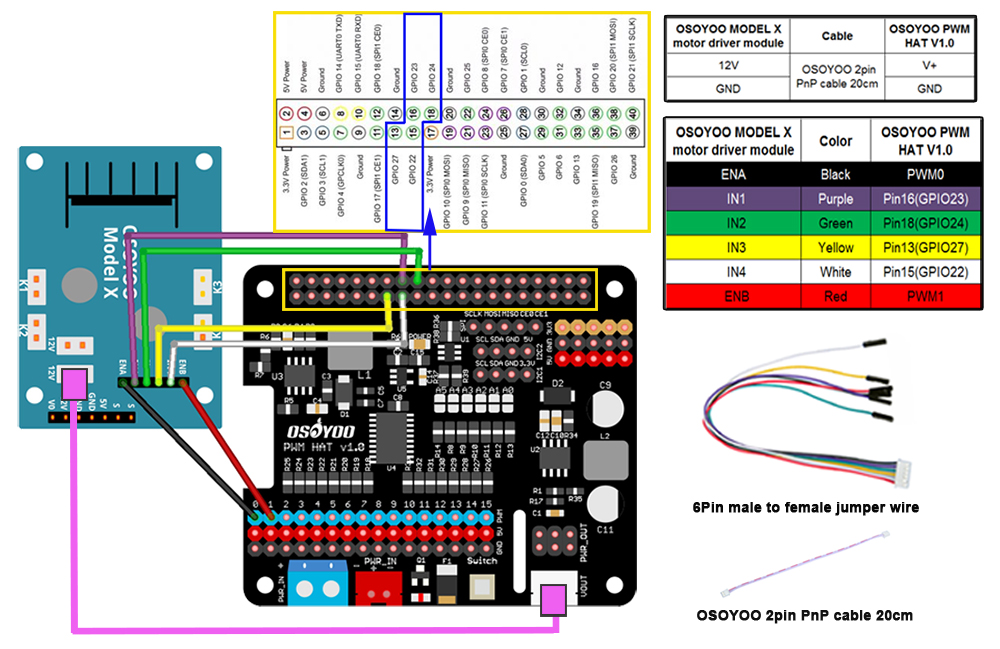
Schritt 3: Verbinden Sie das OSOYOO MODEL X-Motortreibermodul mit OSOYOO PWM Hat V1.0 mit 6-poligem Buchse-zu-Buchse-Überbrückungskabel, schließen Sie auch ein 2-poliges 20-cm-Kabel wie folgt an:
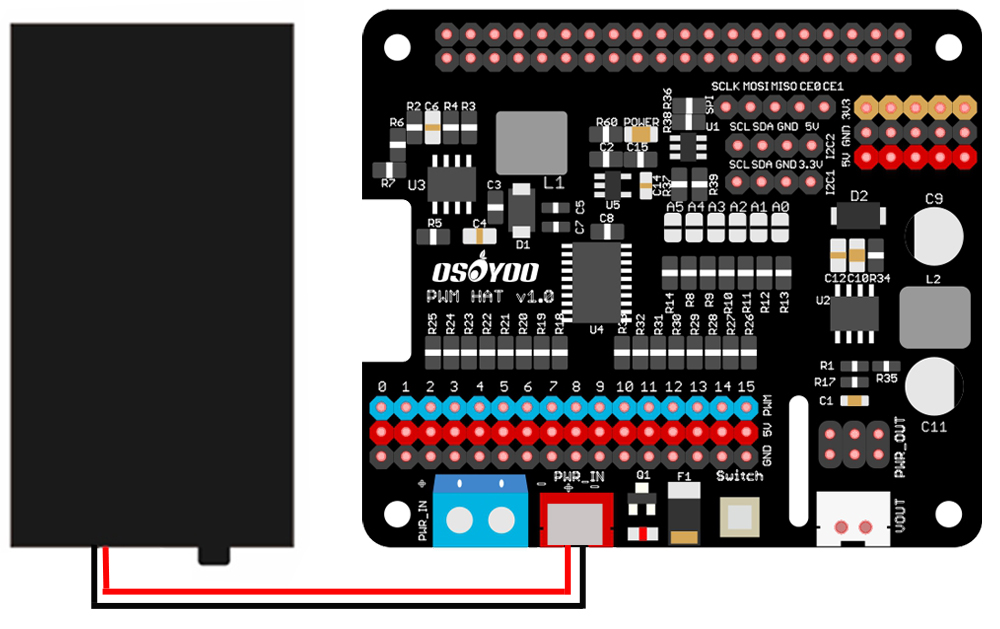
Schritt 4: Verbinden Sie den 18650-Batteriekasten wie folgt mit dem OSOYOO PWM Hat V1.0:
Schritt 5: Verbinden Sie das obere Chassis mit 4 Stück M3 * 10 Sechskantschrauben und 4 Stück M3-Unterlegscheiben mit dem unteren Chassis
Schritt 6: Bitte legen Sie Ihre 18650-Batterien gemäß den folgenden Anweisungen in den Batteriekasten für 18650 ein (Hinweis: Überprüfen Sie die Packungsanweisung und stellen Sie sicher, dass die Polrichtung korrekt ist, da dies sonst Ihr Gerät zerstören und Brandgefahr verursachen kann.)
Jetzt ist die Hardware-Installation fast ausgefallen.
Betriebssystem: Dieses Tutorial wurde unter Raspberry Pi Bookworm und Trixie OS getestet.
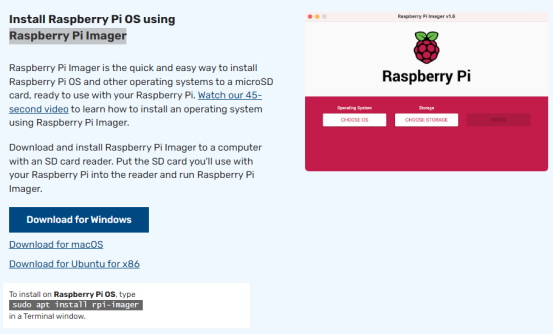
Hier sind die Schritte zur Installation des Raspberry Pi OS:
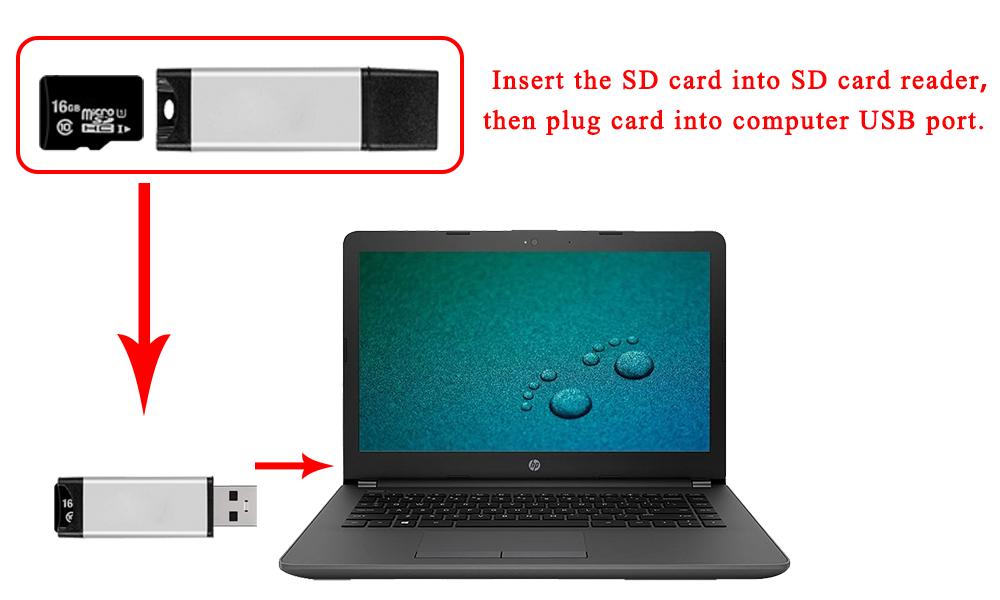
Schritt 1: Brennen Sie das Raspberry Pi OS auf eine neue oder formatierte SD-Karte (mindestens 16 GB) (überspringen Sie diesen Schritt, wenn auf Ihrer SD-Karte bereits ein Raspberry Pi OS-Image vorinstalliert ist).
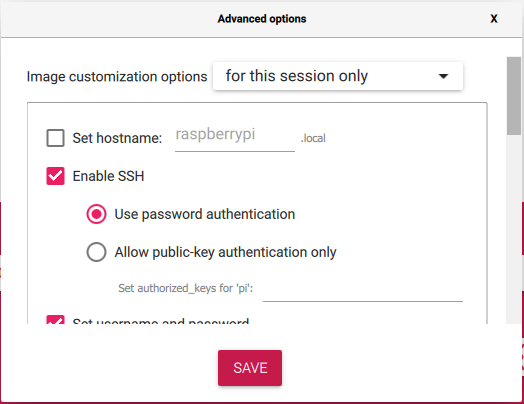
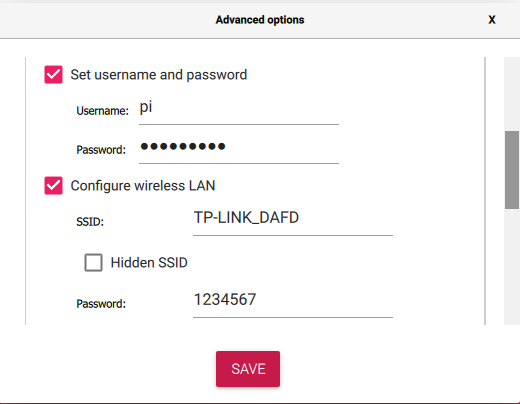
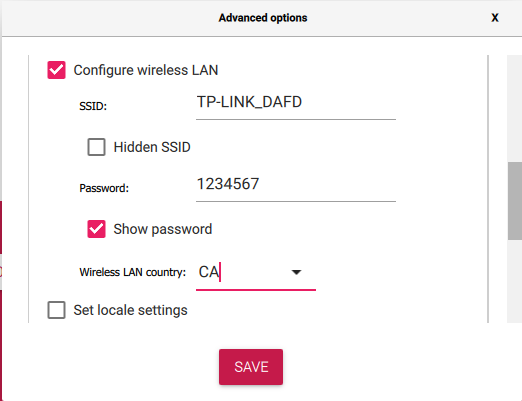
Hinweis: Bitte bearbeiten Sie die Einstellungen, um SSH zu aktivieren, Benutzername und Passwort festzulegen und eine WLAN-Verbindung herzustellen, wenn Sie das Raspberry Pi-Betriebssystem schreiben.
Schritt 2: Die IP-Adresse kennen
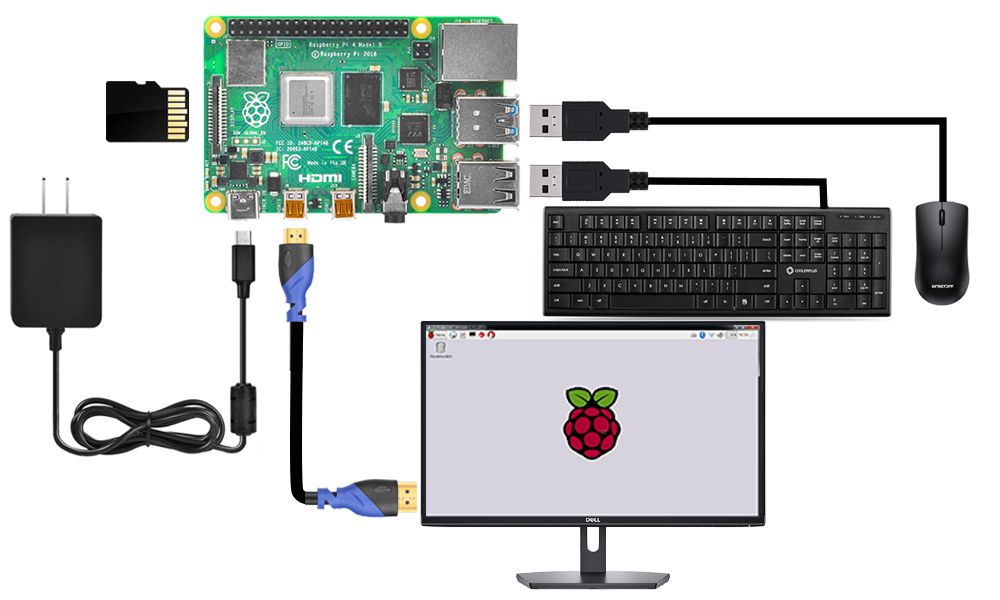
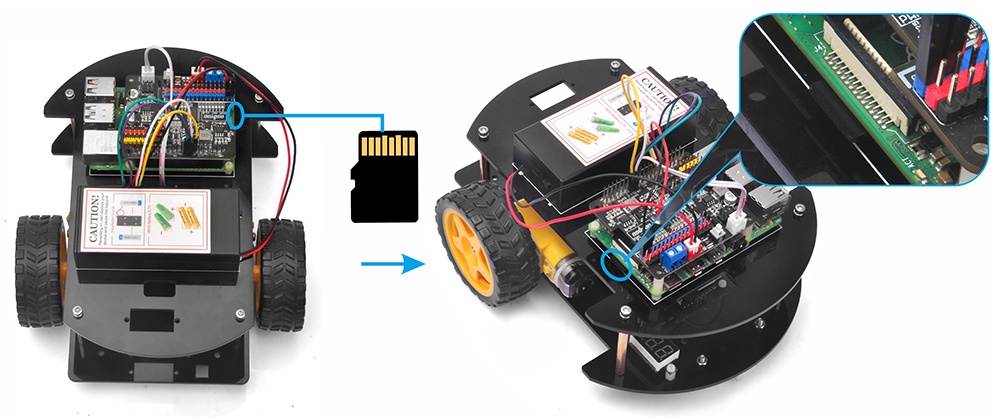
1. Verbinden Sie den Raspberry Pi mit dem HDMI-Monitor oder Fernseher. Schließen Sie eine Tastatur und eine Maus an die USB-Anschlüsse des Raspberry Pi an. Stecken Sie die SD-Karte (aus Schritt 1) in den Steckplatz des Raspberry Pi (wenn Sie Ihren eigenen Raspberry Pi-Roboterwagen installiert haben, ersetzen Sie den Raspberry Pi in der folgenden Abbildung durch Ihren Roboterwagen).
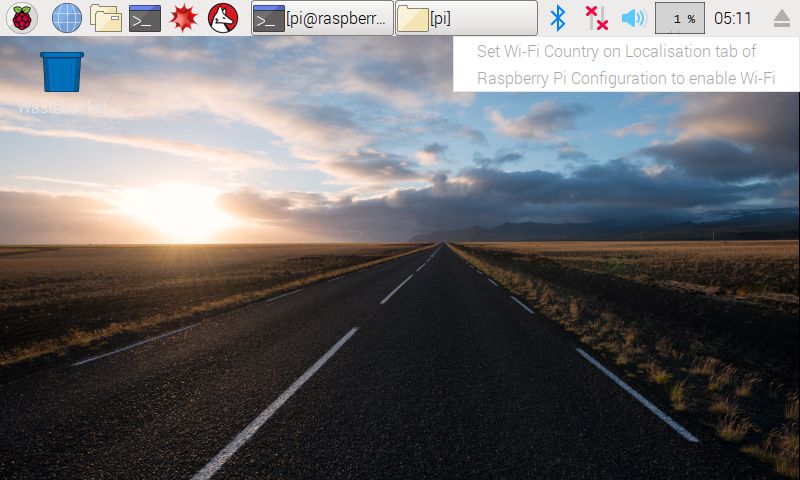
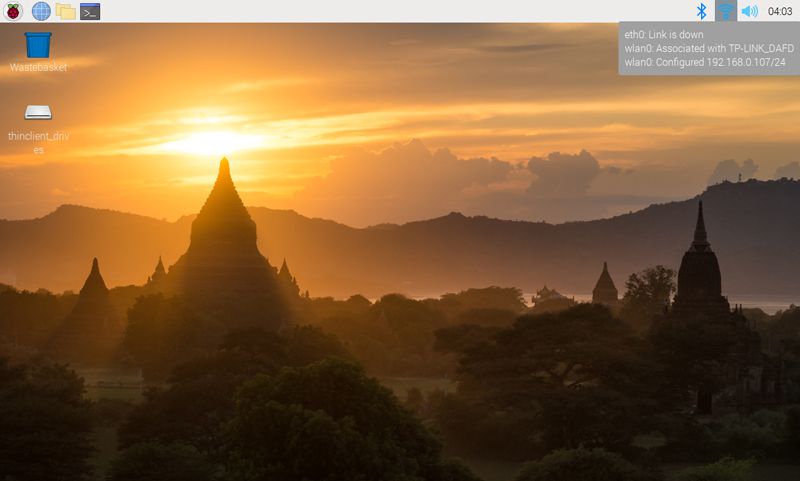
2. Wenn Sie mit der Maus über das LAN-Symbol fahren und die folgende Meldung angezeigt wird:
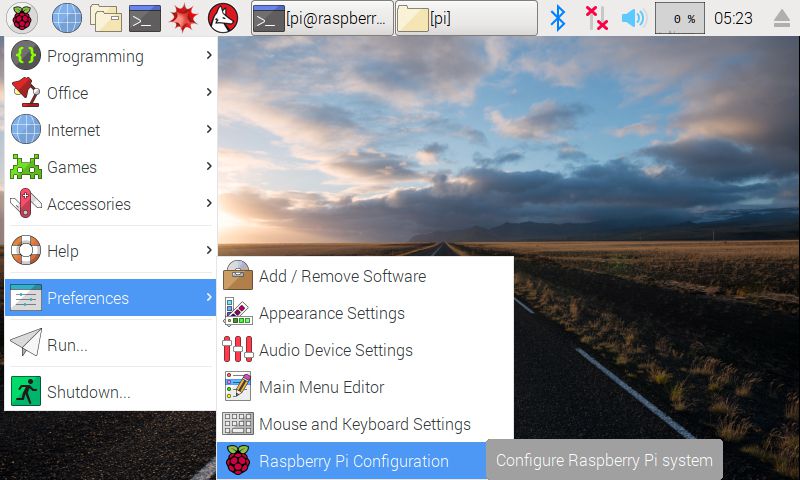
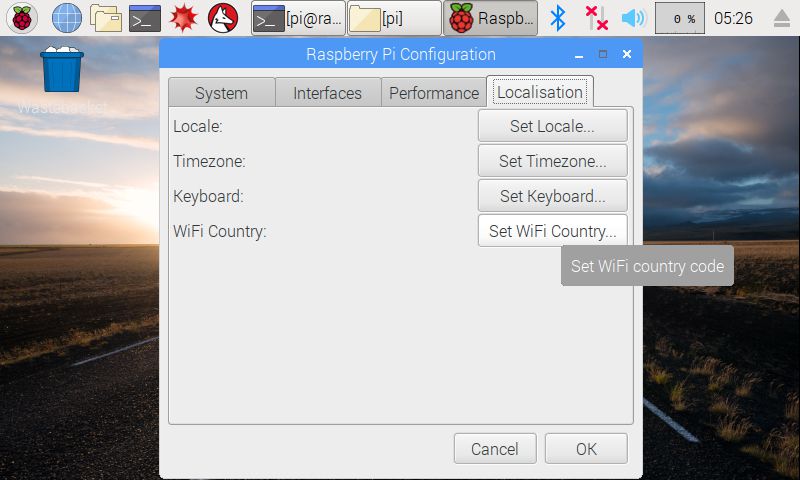
3. Klicken Sie wie folgt auf WLAN-Verbindung konfigurieren:
4. Ermitteln Sie die IP-Adresse des RPi.
Methode A: Schließen Sie den Pi an den Monitor und die Maus an und klicken Sie auf das LAN- oder WIFI-Symbol, um die IP-Adresse zu erhalten, wie auf dem folgenden Foto gezeigt.
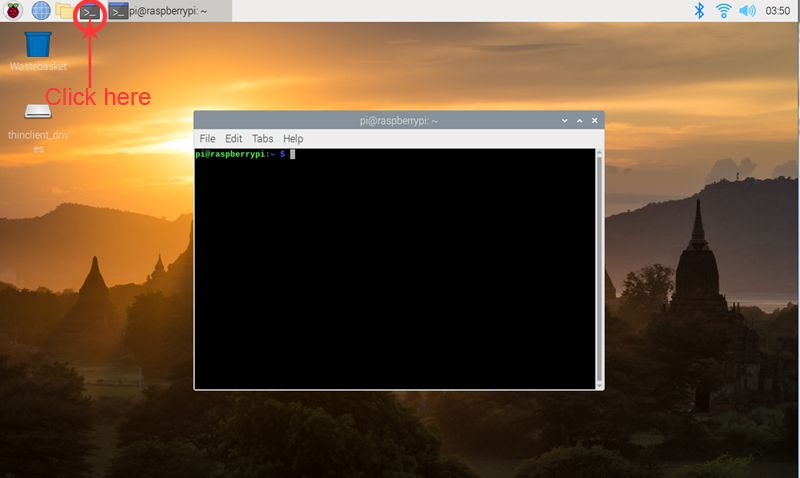
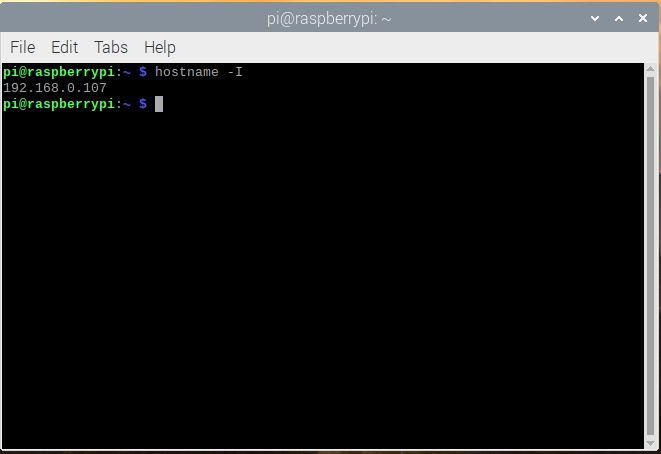
Methode B: Klicken Sie auf das Symbol Terminal auf dem Bildschirm und geben Sie den folgenden Befehl in das Terminalfenster ein, um Ihre IP-Adresse zu erhalten:
hostname -I
Schritt 3: Verwenden Sie SSH-Tools, um den Raspberry Pi fernzusteuern
Hinweis:
1) Weitere Informationen zur Verwendung des SSH-Tools zur Fernsteuerung des Raspberry Pi finden Sie unter: https://osoyoo.com/2017/06/20/raspberry-pi-3-basic-tutorial/#7 2) In unseren Beispielen verwenden wir einen Windows-PC als Remote-Konsolengerät und PuTTY als SSH-Tool.
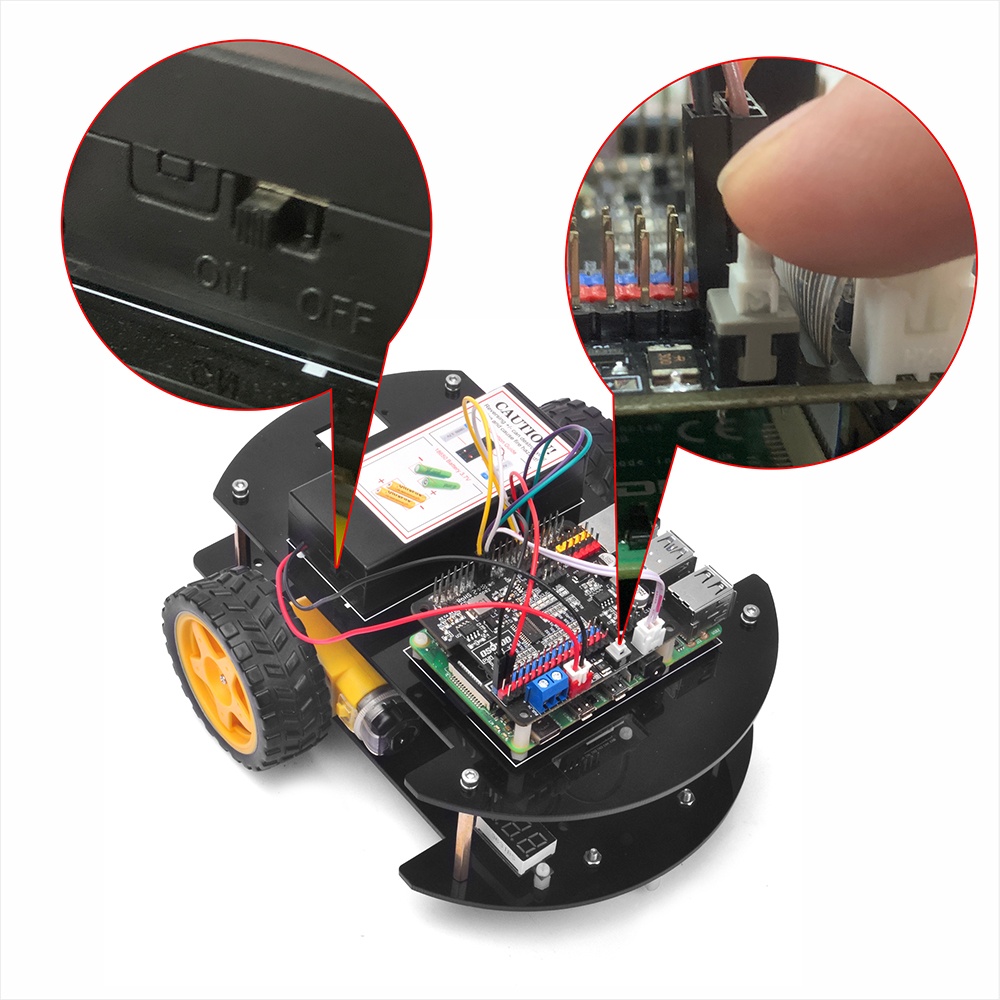
1. Installieren Sie den Raspberry Pi mit der SD-Karte (aus Schritt 2) im Roboter-Auto (Achtung: Sie müssen den Raspberry Pi zuerst ausschalten) und schalten Sie dann das Roboter-Auto ein.
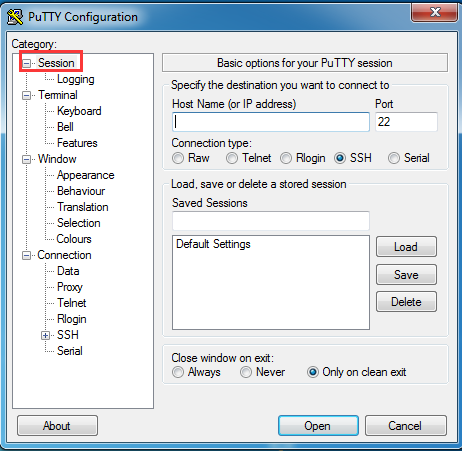
3. Öffnen Sie PuTTY und klicken Sie in der linken Baumstruktur auf „Session“ (in der Regel ist diese beim Start von PuTTY ausgeblendet):
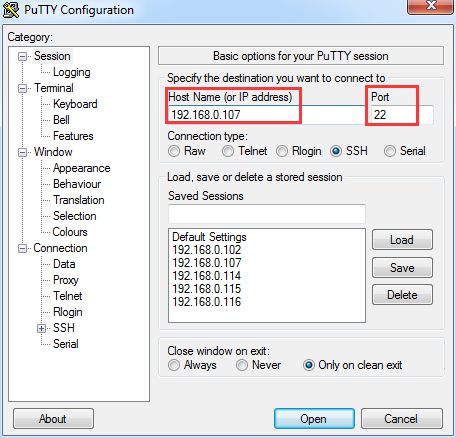
4. Geben Sie die erhaltene IP-Adresse in das Textfeld unter „Hostname (oder IP-Adresse)“ und 22 unter „Port“ (Standardwert ist 22) ein und klicken Sie dann auf „Öffnen“.
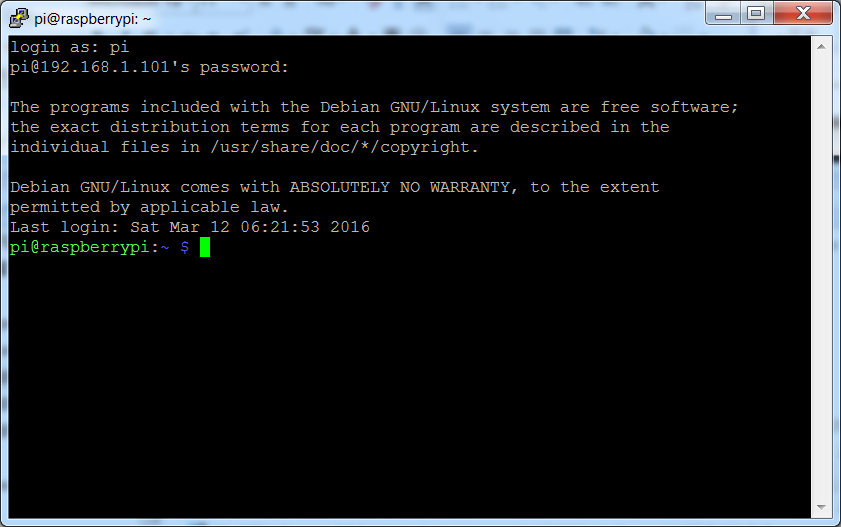
5. Beachten Sie, dass Sie bei der ersten Anmeldung am Raspberry Pi mit der IP-Adresse eine Sicherheitserinnerung erhalten. Klicken Sie einfach auf „Ja“. Wenn das PuTTY-Fenster „Login as:“ anzeigt, geben Sie den Benutzernamen „pi“ und das Passwort „raspberry“ ein (das Standardpasswort, sofern Sie es nicht geändert haben).
Hinweis: Wenn Sie das Passwort eingeben, wird im Fenster nichts angezeigt, aber Sie geben tatsächlich etwas ein. Konzentrieren Sie sich also darauf, es richtig einzugeben, und drücken Sie die Eingabetaste. Nachdem Sie sich erfolgreich beim RPi angemeldet haben, wird das Fenster wie folgt angezeigt:
Wenn Sie ein MacBook oder einen Linux-Computer (d. h. einen anderen Raspberry Pi) verwenden, können Sie anstelle von Putty direkt ein Shell-Terminal öffnen und den folgenden Befehl eingeben:
ssh pi@your_robot_car_ip
your_robot_car_ip bezeichnet die IP-Adresse Ihres Raspberry Pi-Roboterautos, die Sie mit dem Befehl hostname -I abrufen können.
Wenn die IP-Adresse Ihres Roboterautos beispielsweise 192.168.0.111 lautet, lautet der richtige Befehl für den Zugriff auf Ihr Auto: ssh pi@192.168.0.111
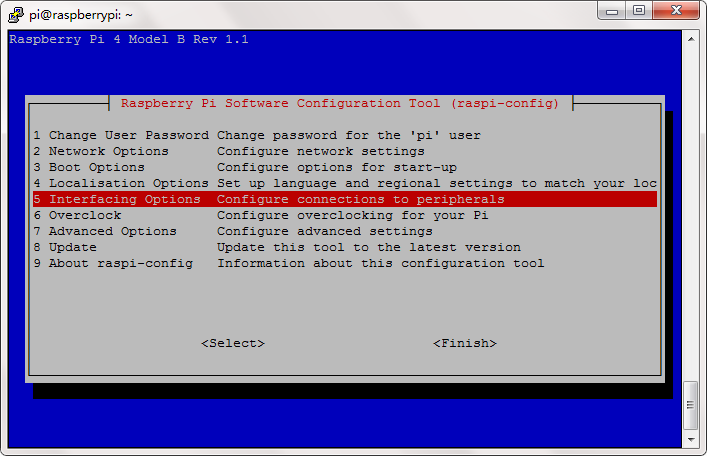
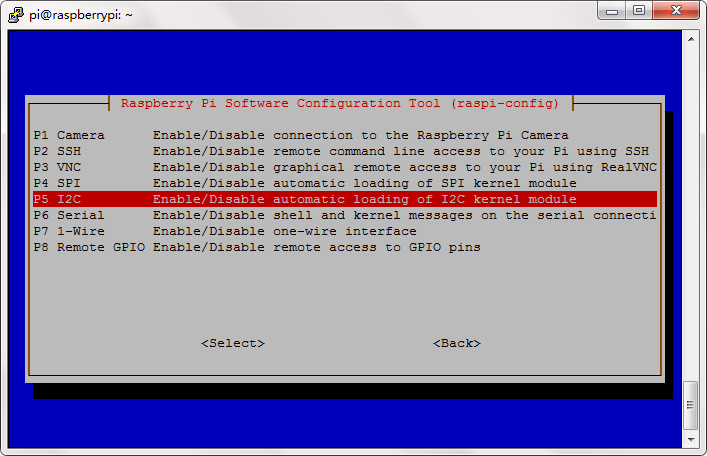
Schritt 4: I2C aktivieren
Wenn Sie I2C nicht aktiviert haben, führen Sie bitte den folgenden Befehl aus, um I2C zu aktivieren.
sudo raspi-config
Dann wählen Sie Interfacing Options->I2C->Yes->Ok->Finish
Schritt 5: Aktualisieren Sie Ihr System:
sudo apt-get update
sudo apt-get upgrade
Schritt 6: Installieren Sie pca9685 und die Servokit-Bibliothek, indem Sie die folgenden Befehle ausführen
Schritt 8: Stellen Sie das Roboterauto auf den Boden und führen Sie dann das Python-Programm für die Grundbewegungen aus, indem Sie den folgenden Befehl in das Terminal eingeben:
python picar-basic4.py
Nachdem das oben genannte Python-Programm ausgeführt wurde, fährt Ihr Roboterauto 1 Sekunde lang vorwärts, dann 1 Sekunde lang rückwärts, dreht sich 1 Sekunde lang nach links und 1 Sekunde lang nach rechts und hält dann an. (Wenn sich das Roboterauto nicht wie oben beschrieben bewegt, überprüfen Sie bitte zunächst Ihre Verbindungen.)
Wir haben vollständige Kommentare in den Python-Beispielcode geschrieben http://osoyoo.com/driver/picar/picar-basic4.py. Wenn Sie über grundlegende Python-Kenntnisse verfügen, können Sie leicht verstehen, wie Sie den Code für Ihre eigene Anwendung anpassen können.

































 Schritt 2: Verbinden Sie das Spannungsmessgerät mit dem OSOYOO MODEL X-Motortreibermodul mit 3-poligen Überbrückungsdrähten von Buchse zu Buchse wie folgt Anschlussdiagramm:
Schritt 2: Verbinden Sie das Spannungsmessgerät mit dem OSOYOO MODEL X-Motortreibermodul mit 3-poligen Überbrückungsdrähten von Buchse zu Buchse wie folgt Anschlussdiagramm: